
Multi-Agent Robot System to Monitor and Enforce Physical Distancing Constraints in Large Areas to Combat COVID-19 and Future Pandemics

 ,
, 

Abstract
:1. Introduction
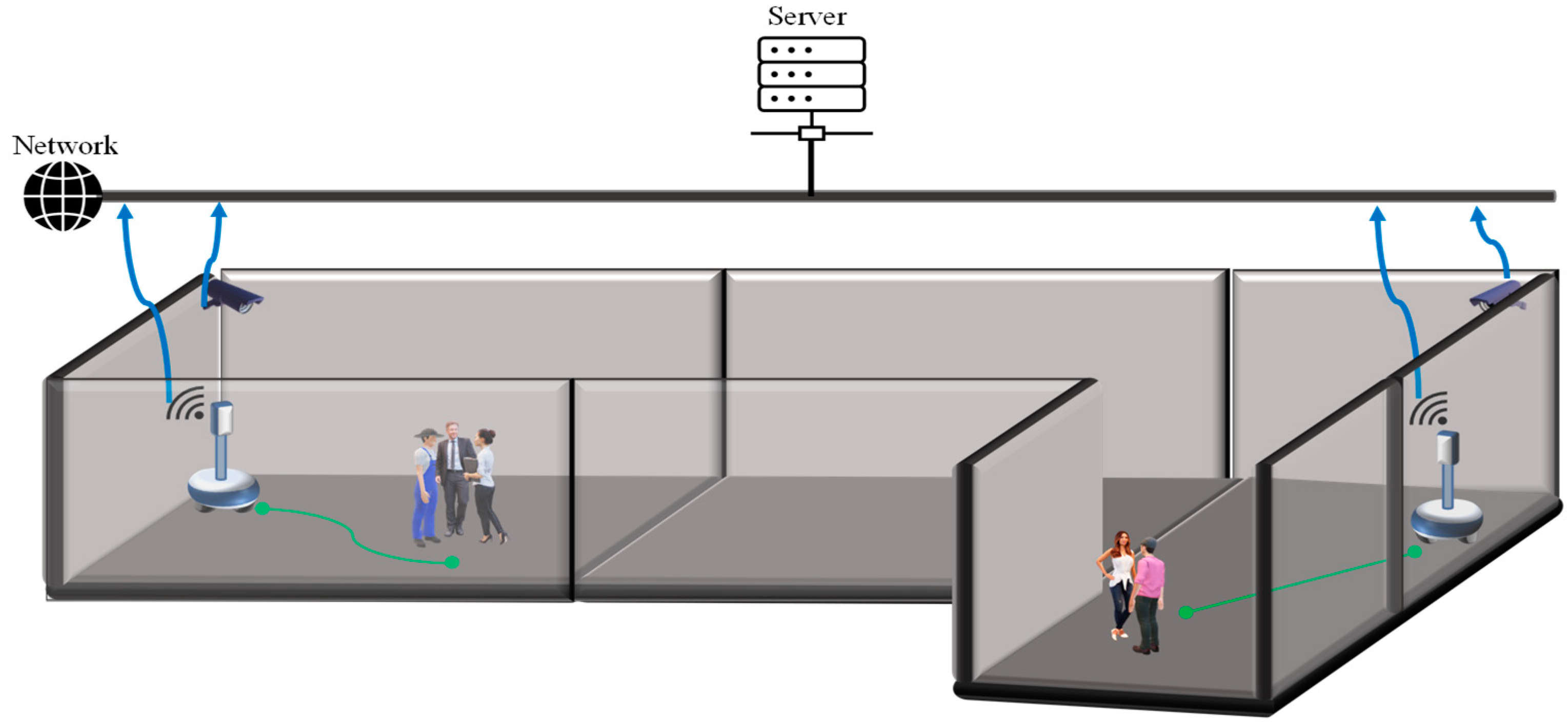
- We propose an intelligent and cooperative MARS for the efficient monitoring of physical distancing constraints and interactively enforcing them through HRI to combat COVID-19 and future pandemics. To the best of our knowledge, we are the first to propose such a monitoring system, which is based on a distributed network of multiple cameras and a multi-robot system (MRS) to combat ongoing and future pandemics.
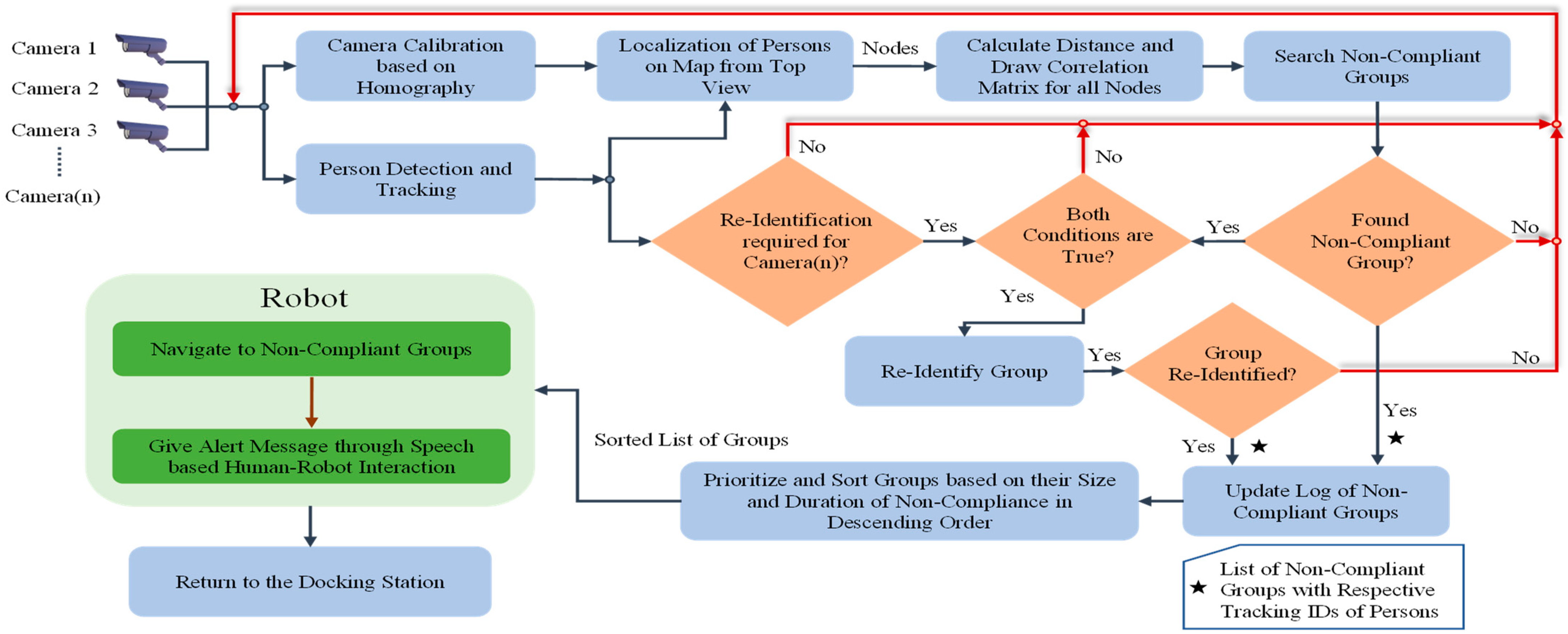
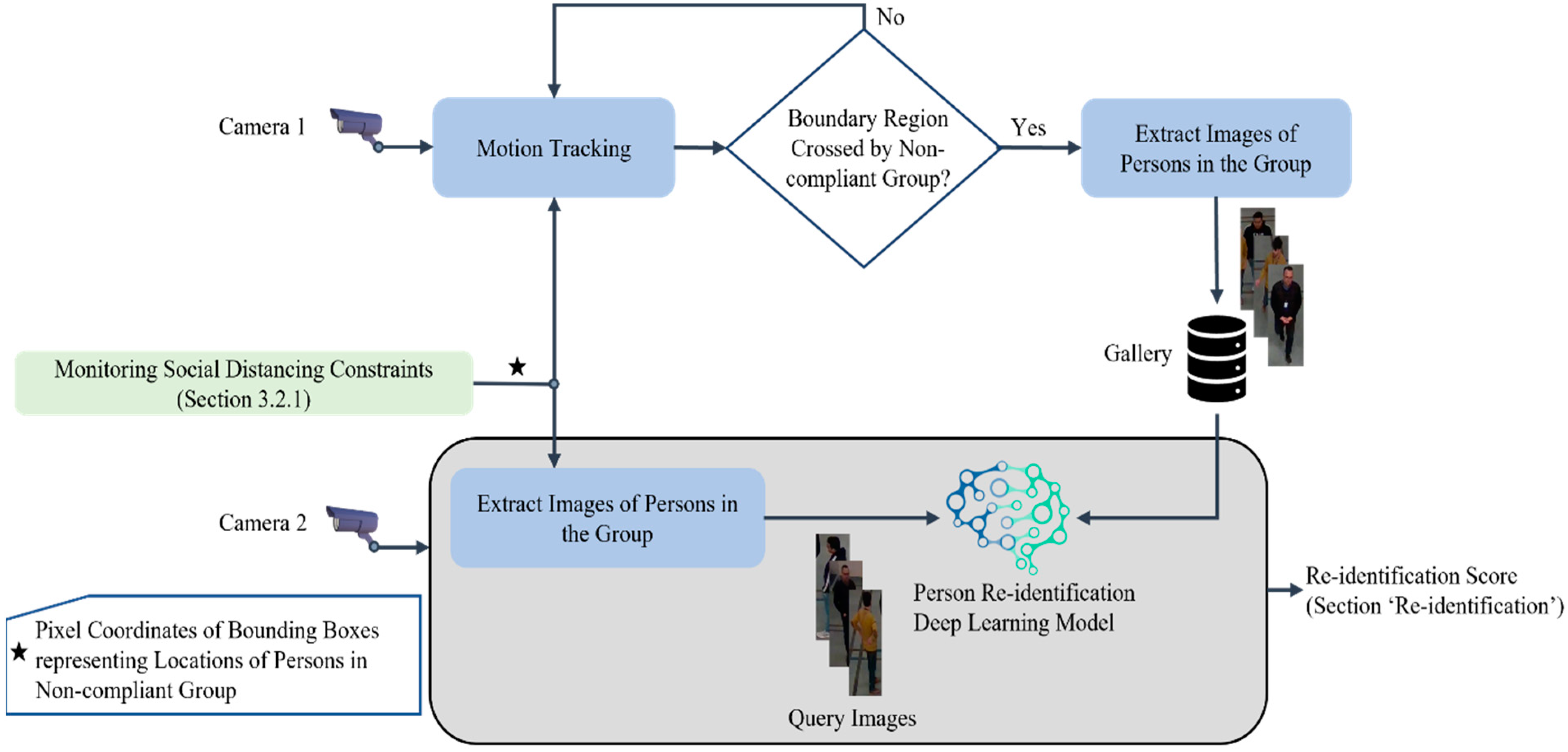
- We develop a pipeline for group re-identification through person re-identification using a deep learning-based technique to track and re-identify non-compliant groups through the multi-camera system. This method ensures the long-term tracking of non-compliant groups that are wandering from one place to another in large areas, attending to them at highest priority through a robot and notifying the security control room in a timely manner in case of repetitive violations.
- Based on our proposed system, we ensured that all non-compliant groups were inclusively tracked and received the alert message about a breach of physical distancing constraints through HRI.
2. Related Work
2.1. Multi-Agent Systems for Intelligent Surveillance
2.2. Role of Robotics during COVID-19
2.3. Effectiveness of Physical Distancing
2.4. Emerging Technologies to Monitor Physical Distancing
3. Proposed System
3.1. Hardware Architecture
3.2. Our Method
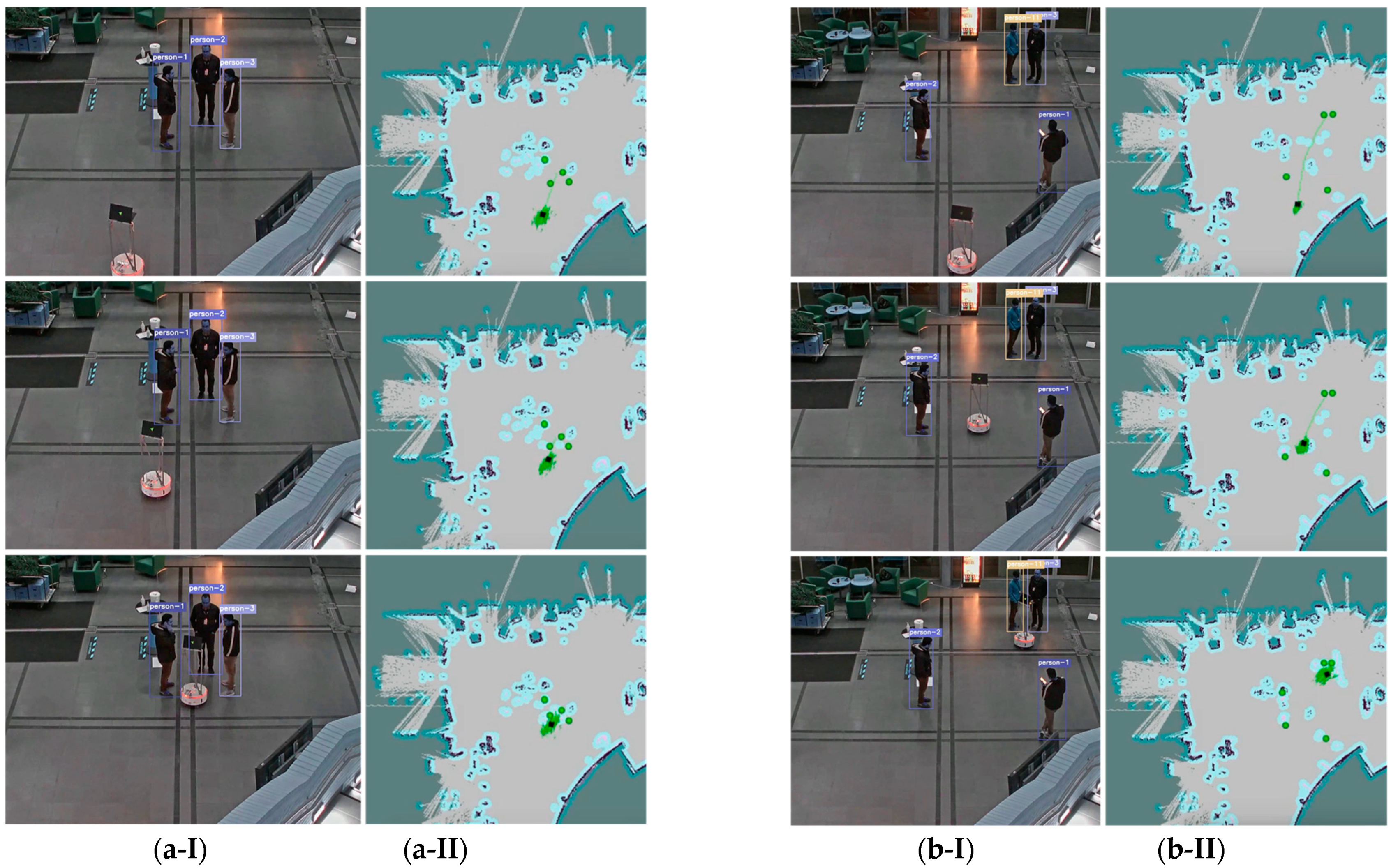
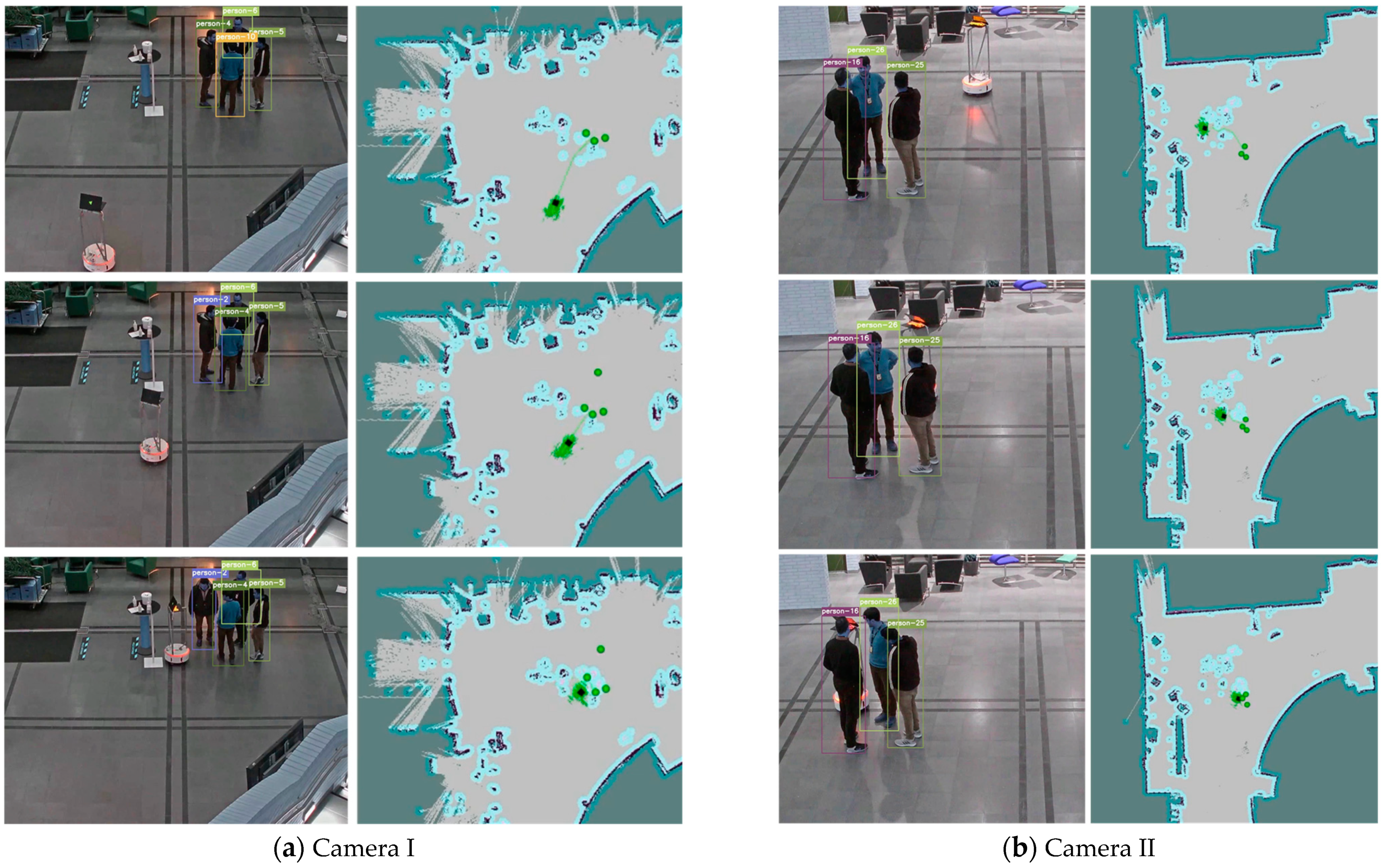
3.2.1. Monitoring Physical Distancing Constraints
Person Detection and Tracking
Localization of Detected Persons
Distance Estimation and Search for Non-Compliant Groups
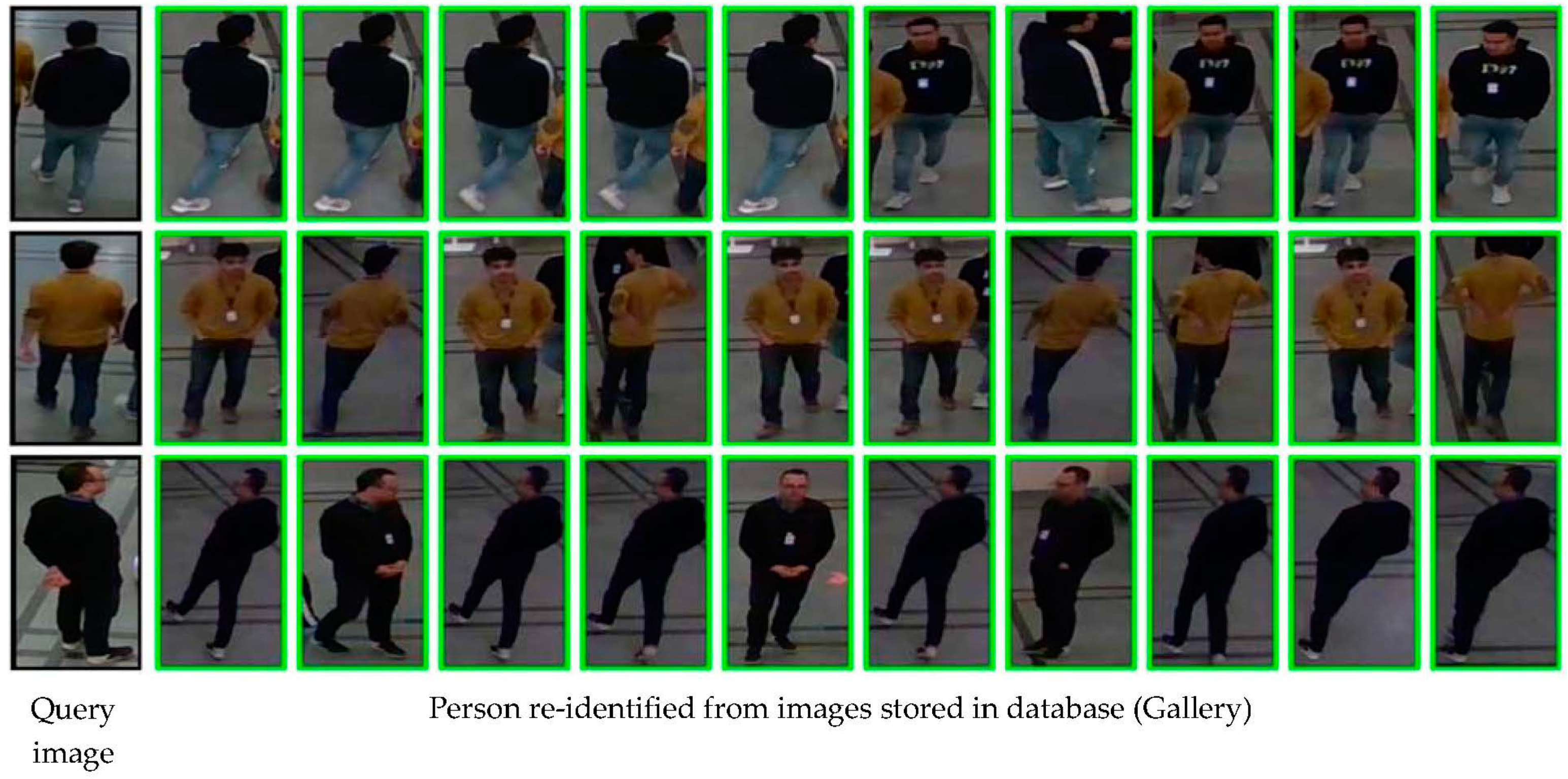
3.2.2. Re-Identification of Non-Compliant Groups
Motion Tracking
Re-Identification
| Algorithm 1 Re-identification of non-compliant group |
| Input: = Extracted images of persons in target non-compliant group as |
| Output: Re-identification Status ( or ), = List of identities of re-identified persons as |
| Steps: |
| 1: |
| 2: |
| 3: Compute Sl |
| 4: If Sl ≥ 2 then return , IDPi |
| 5: Else return , IDPi |
3.2.3. Prioritization of Non-Compliant Groups
3.2.4. Enforcement of Physical Distancing Constraints
4. Experimental Results
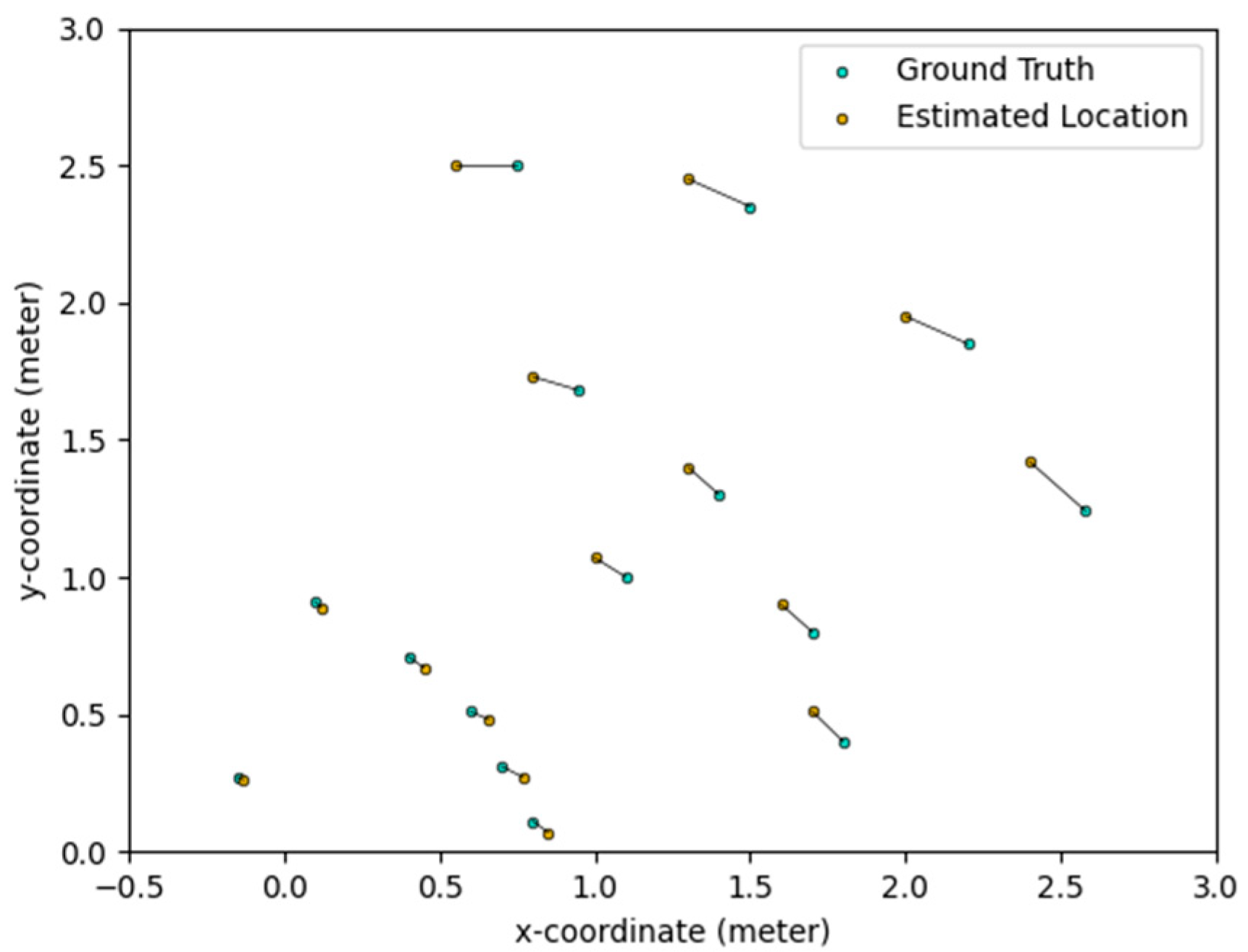
4.1. Accuracy of Non-Compliant Group Localization
4.2. Accuracy of Re-Identification of Non-Compliant Groups
5. Conclusions, Limitations and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Le Pan, N. The History of Pandemics. Available online: https://www.visualcapitalist.com/history-of-pandemics-deadliest/ (accessed on 19 January 2021).
- Xu, B.; Gutierrez, B.; Mekaru, S.; Sewalk, K.; Goodwin, L.; Loskill, A.; Cohn, E.L.; Hswen, Y.; Hill, S.C.; Cobo, M.M. Epidemiological data from the COVID-19 outbreak, real-time case information. Sci. Data 2020, 7, 1–6. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, F.; Zviedrite, N.; Uzicanin, A. Effectiveness of workplace social distancing measures in reducing influenza transmission: A systematic review. BMC Public Health 2018, 18, 518. [Google Scholar] [CrossRef] [PubMed]
- Tuzovic, S.; Kabadayi, S. The influence of social distancing on employee well-being: A conceptual framework and research agenda. J. Serv. Manag. 2018, 32, 145–160. [Google Scholar] [CrossRef]
- Yang, G.-Z.; Nelson, B.J.; Murphy, R.R.; Choset, H.; Christensen, H.; Collins, S.H.; Dario, P.; Goldberg, K.; Ikuta, K.; Jacobstein, N. Combating COVID-19—The role of robotics in managing public health and infectious diseases. Sci. Robot. 2020, 5, eabb5589. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Milella, A.; Di Paola, D.; Mazzeo, P.L.; Spagnolo, P.; Leo, M.; Cicirelli, G.; D’Orazio, T. Active surveillance of dynamic environments using a multi-agent system. IFAC Proc. Vol. 2010, 43, 13–18. [Google Scholar] [CrossRef] [Green Version]
- Pennisi, A.; Previtali, F.; Gennari, C.; Bloisi, D.D.; Iocchi, L.; Ficarola, F.; Vitaletti, A.; Nardi, D. Multi-robot surveillance through a distributed sensor network. In Cooperative Robots and Sensor Networks 2015; Springer International Publishing: Cham, Switzerland, 2015; pp. 77–98. [Google Scholar]
- Zemmar, A.; Lozano, A.M.; Nelson, B.J. The rise of robots in surgical environments during COVID-19. Nat. Mach. Intell. 2020, 2, 566–572. [Google Scholar] [CrossRef]
- Fan, T.; Chen, Z.; Zhao, X.; Liang, J.; Shen, C.; Manocha, D.; Pan, J.; Zhang, W. Autonomous Social Distancing in Urban Environments using a Quadruped Robot. arXiv 2020, arXiv:2008.08889. [Google Scholar]
- Aymerich-Franch, L.; Ferrer, I. The implementation of social robots during the COVID-19 pandemic. arXiv 2020, arXiv:2007.03941. [Google Scholar]
- Khan, Z.H.; Siddique, A.; Lee, C.W. Robotics Utilization for Healthcare Digitization in Global COVID-19 Management. Int. J. Environ. Res. Public Health 2020, 17, 3819. [Google Scholar] [CrossRef]
- Lanza, F.; Seidita, V.; Chella, A. Agents and robots for collaborating and supporting physicians in healthcare scenarios. J. Biomed. Inf. 2020, 108, 103483. [Google Scholar] [CrossRef]
- Sathyamoorthy, A.J.; Patel, U.; Savle, Y.A.; Paul, M.; Manocha, D. COVID-robot: Monitoring social distancing constraints in crowded scenarios. arXiv 2020, arXiv:2008.06585. [Google Scholar]
- Kim, I.S.; Choi, H.S.; Yi, K.M.; Choi, J.Y.; Kong, S.G. Intelligent visual surveillance—A survey. Int. J. Control Autom. Syst. 2010, 8, 926–939. [Google Scholar] [CrossRef]
- Cao, M.; Morse, A.S.; Anderson, B.D. Reaching a consensus in a dynamically changing environment: A graphical approach. SIAM J. Control Optim. 2008, 47, 575–600. [Google Scholar] [CrossRef] [Green Version]
- Castanedo, F.; García, J.; Patricio, M.A.; Molina, J.M. Data fusion to improve trajectory tracking in a Cooperative Surveillance Multi-Agent Architecture. Inf. Fusion 2010, 11, 243–255. [Google Scholar] [CrossRef] [Green Version]
- Van der Walle, D.; Fidan, B.; Sutton, A.; Yu, C.; Anderson, B.D. Non-hierarchical UAV formation control for surveillance tasks. In Proceedings of the 2008 American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 777–782. [Google Scholar]
- Du, S.-L.; Sun, X.-M.; Cao, M.; Wang, W. Pursuing an evader through cooperative relaying in multi-agent surveillance networks. Automatica 2017, 83, 155–161. [Google Scholar] [CrossRef] [Green Version]
- Mostafa, S.A.; Mustapha, A.; Mohammed, M.A.; Ahmad, M.S.; Mahmoud, M.A. A fuzzy logic control in adjustable autonomy of a multi-agent system for an automated elderly movement monitoring application. Int. J. Med. Inform. 2018, 112, 173–184. [Google Scholar] [CrossRef] [PubMed]
- Kariotoglou, N.; Raimondo, D.M.; Summers, S.J.; Lygeros, J. Multi-agent autonomous surveillance: A framework based on stochastic reachability and hierarchical task allocation. J. Dyn. Syst. Meas. Control 2015, 137, 031008. [Google Scholar] [CrossRef]
- Aksaray, D.; Leahy, K.; Belta, C. Distributed multi-agent persistent surveillance under temporal logic constraints. IFAC-PapersOnLine 2015, 48, 174–179. [Google Scholar]
- Wu, Y.; Zhang, B.; Yi, X.; Tang, Y. Communication-motion planning for wireless relay-assisted multi-robot system. IEEE Wirel. Commun. Lett. 2016, 5, 568–571. [Google Scholar] [CrossRef]
- Jahn, A.; Alitappeh, R.J.; Saldaña, D.; Pimenta, L.C.; Santos, A.G.; Campos, M.F. Distributed multi-robot coordination for dynamic perimeter surveillance in uncertain environments. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Marina Bay Sands Convention Centre, Singapore, 29 May–3 June 2017; pp. 273–278. [Google Scholar]
- Scherer, J.; Rinner, B. Multi-robot persistent surveillance with connectivity constraints. IEEE Access 2020, 8, 15093–15109. [Google Scholar] [CrossRef]
- Javaid, M.; Haleem, A.; Vaishya, R.; Bahl, S.; Suman, R.; Vaish, A. Industry 4.0 technologies and their applications in fighting COVID-19 pandemic. Diabetes Metab. Syndr. Clin. Res. Rev. 2020, 14, 419–422. [Google Scholar] [CrossRef] [PubMed]
- Zeng, Z.; Chen, P.-J.; Lew, A.A. From high-touch to high-tech: COVID-19 drives robotics adoption. Tour. Geogr. 2020, 22, 724–734. [Google Scholar] [CrossRef]
- Kimmig, R.; Verheijen, R.H.; Rudnicki, M. Robot assisted surgery during the COVID-19 pandemic, especially for gynecological cancer: A statement of the Society of European Robotic Gynaecological Surgery (SERGS). J. Gynecol. Oncol. 2020, 31, e59. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tavakoli, M.; Carriere, J.; Torabi, A. Robotics, smart wearable technologies, and autonomous intelligent systems for healthcare during the COVID-19 pandemic: An analysis of the state of the art and future vision. Adv. Intell. Syst. 2020, 2, 2000071. [Google Scholar] [CrossRef]
- Odekerken-Schröder, G.; Mele, C.; Russo-Spena, T.; Mahr, D.; Ruggiero, A. Mitigating loneliness with companion robots in the COVID-19 pandemic and beyond: An integrative framework and research agenda. J. Serv. Manag. 2020, 31, 1149–1162. [Google Scholar] [CrossRef]
- Marchetti, A.; Di Dio, C.; Massaro, D.; Manzi, F. The psychosocial fuzziness of fear in the coronavirus (COVID-19) era and the role of robots. Front. Psychol. 2020, 11, 2245. [Google Scholar] [CrossRef]
- Henkel, A.P.; Čaić, M.; Blaurock, M.; Okan, M. Robotic transformative service research: Deploying social robots for consumer well-being during COVID-19 and beyond. J. Serv. Manag. 2020, 31, 1131–1148. [Google Scholar] [CrossRef]
- Ghafurian, M.; Ellard, C.; Dautenhahn, K. Social Companion Robots to Reduce Isolation: A Perception Change Due to COVID-19. arXiv 2020, arXiv:2008.05382. [Google Scholar]
- Joshi, S.; Collins, S.; Kamino, W.; Gomez, R.; Šabanović, S. Social Robots for Socio-Physical Distancing. In Proceedings of the International Conference on Social Robotics, Golden, CO, USA, 14–18 November 2020; pp. 440–452. [Google Scholar]
- Ackerman, E. Swiss Startup Developing UV Disinfection Robot for Offices and Commercial Spaces. IEEE Spectrum 2020. Available online: https://ieeeusa.org/swiss-startup-developing-uv-disinfection-robot/ (accessed on 5 December 2020).
- Reuter, J.Y.a.T. Aerial Spray and Disinfection. Available online: https://www.weforum.org/agenda/2020/03/three-ways-china-is-using-drones-to-fight-coronavirus/ (accessed on 5 December 2020).
- Mao, L. Agent-based simulation for weekend-extension strategies to mitigate influenza outbreaks. BMC Public Health 2011, 11, 522. [Google Scholar] [CrossRef] [Green Version]
- Kumar, S.; Grefenstette, J.J.; Galloway, D.; Albert, S.M.; Burke, D.S. Policies to reduce influenza in the workplace: Impact assessments using an agent-based model. Am. J. Public Health 2013, 103, 1406–1411. [Google Scholar] [CrossRef] [PubMed]
- Timpka, T.; Eriksson, H.; Holm, E.; Strömgren, M.; Ekberg, J.; Spreco, A.; Dahlström, Ö. Relevance of workplace social mixing during influenza pandemics: An experimental modelling study of workplace cultures. Epidemiol. Infect. 2016, 144, 2031–2042. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nguyen, C.T.; Saputra, Y.M.; Van Huynh, N.; Nguyen, N.-T.; Khoa, T.V.; Tuan, B.M.; Nguyen, D.N.; Hoang, D.T.; Vu, T.X.; Dutkiewicz, E. Enabling and Emerging Technologies for Social Distancing: A Comprehensive Survey. arXiv 2020, arXiv:2005.02816. [Google Scholar]
- Palmer, A. Amazon Is Rolling out Cameras That Can Detect If Warehouse Workers are Following Social Distancing Rules. Available online: https://www.cnbc.com/2020/06/16/amazon-using-cameras-to-enforce-social-distancing-rules-at-warehouses.html (accessed on 14 December 2020).
- Spacer, S. Keep People Safe and Workplaces Open. Available online: https://www.safespacer.net/ (accessed on 14 December 2020).
- Waltz, E. Back to Work: Wearables Track Social Distancing and Sick Employees in the Workplace. IEEE Spectrum 2020. Available online: https://spectrum.ieee.org/wearables-track-social-distancing-sick-employees-workplace (accessed on 3 July 2020).
- Exposure Notifications: Using Technology to Help Public Health Authorities Fight COVID-19. Available online: https://www.google.com/covid19/exposurenotifications/ (accessed on 14 December 2020).
- Technology, E. EAIBOT SMART. Available online: http://www.eaibot.com/product/Smart (accessed on 10 June 2020).
- Robotics, O. Robot Operating System (ROS). Available online: https://www.ros.org/ (accessed on 9 April 2020).
- Tan, M.; Pang, R.; Le, Q.V. Efficientdet: Scalable and efficient object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Virtual, 13 June 2020; pp. 10781–10790. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Wojke, N.; Bewley, A.; Paulus, D. Simple online and realtime tracking with a deep association metric. In Proceedings of the 2017 IEEE International Conference on Image Processing (ICIP), Beijing, China, 17–20 September 2017; pp. 3645–3649. [Google Scholar]
- Bochkovskiy, A.; Wang, C.-Y.; Liao, H.-Y.M. YOLOv4: Optimal Speed and Accuracy of Object Detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Developers, N. All Simple Paths—NetworkX 1.9.1 Documentation. Available online: https://networkx.org/documentation/networkx-1.9.1/reference/generated/networkx.algorithms.simple_paths.all_simple_paths.html#r277 (accessed on 14 December 2020).
- Sedgewick, R. Algorithms in c, Part 5: Graph Algorithms; Pearson Education: London, UK, 2001. [Google Scholar]
- Zhou, K.; Yang, Y.; Cavallaro, A.; Xiang, T. Omni-scale feature learning for person re-identification. In Proceedings of the IEEE International Conference on Computer Vision, Seoul, Korea, 27 October–2 November 2019; pp. 3702–3712. [Google Scholar]
- Zheng, L.; Shen, L.; Tian, L.; Wang, S.; Wang, J.; Tian, Q. Scalable person re-identification: A benchmark. In Proceedings of the IEEE International Conference on Computer Vision, Washington, DC, USA, 7–13 December; pp. 1116–1124.
- Li, W.; Zhao, R.; Xiao, T.; Wang, X. Deepreid: Deep filter pairing neural network for person re-identification. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 152–159. [Google Scholar]
- Wei, L.; Zhang, S.; Gao, W.; Tian, Q. Person transfer gan to bridge domain gap for person re-identification. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 79–88. [Google Scholar]
- Ristani, E.; Solera, F.; Zou, R.; Cucchiara, R.; Tomasi, C. Performance measures and a data set for multi-target, multi-camera tracking. In European Conference on Computer Vision; Springer: Amsterdam, The Netherlands, 2016; pp. 17–35. [Google Scholar]
- Zheng, Z.; Zheng, L.; Yang, Y. Unlabeled samples generated by gan improve the person re-identification baseline in vitro. In Proceedings of the IEEE International Conference on Computer Vision, Cambridge, MA, USA, 20–23 June 1995; pp. 3754–3762. [Google Scholar]
- Loy, C.C.; Xiang, T.; Gong, S. Multi-camera activity correlation analysis. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 1988–1995. [Google Scholar]
- Gray, D.; Brennan, S.; Tao, H. Evaluating appearance models for recognition, reacquisition, and tracking. In Proceedings of the IEEE International Workshop on Performance Evaluation for Tracking and Surveillance (PETS), Rio de Janeiro, Brazil, 14 October 2007; pp. 1–7. [Google Scholar]
- Zhou, K.; Xiang, T. Torchreid: A library for deep learning person re-identification in pytorch. arXiv 2019, arXiv:1910.10093. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Disease Name | Time Period | Death Toll |
|---|---|---|
| Spanish Flu | 1918–1919 | 40 Million–50 Million |
| Hong Kong Flu | 1968–1970 | 1 Million |
| HIV/AIDS | 1981–Present | 25 Million–35 Million |
| SARS | 2002–2003 | 770 |
| Swine Flu | 2009–2010 | 200,000 |
| Ebola | 2014–2016 | 11,000 |
| COVID-19 | 2019–Present | 2.04 Million |
| 0 | 1 | 2 | |
| 1 | 0 | 1 | |
| 2 | 1 | 0 |
| 1 | 1 | 0 | |
| 1 | 1 | 1 | |
| 0 | 1 | 1 |
| Configuration | Total Experiments (Violations Made) | Number of Violations Detected | Number of Enforcements | |
|---|---|---|---|---|
| Without Group Re-identification | 19 | Single Group at a Time | Multiple Groups at a Time | 17 |
| 11 | 6 | |||
| With Group Re-identification | 9 | 8 | 8 | |
| R1 (%) | R5 (%) | R10 (%) | mAP (%) |
|---|---|---|---|
| 99.8 | 100 | 100 | 95.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shah, S.H.H.; Steinnes, O.-M.H.; Gustafsson, E.G.; Hameed, I.A. Multi-Agent Robot System to Monitor and Enforce Physical Distancing Constraints in Large Areas to Combat COVID-19 and Future Pandemics. Appl. Sci. 2021, 11, 7200. https://doi.org/10.3390/app11167200
Shah SHH, Steinnes O-MH, Gustafsson EG, Hameed IA. Multi-Agent Robot System to Monitor and Enforce Physical Distancing Constraints in Large Areas to Combat COVID-19 and Future Pandemics. Applied Sciences. 2021; 11(16):7200. https://doi.org/10.3390/app11167200
Chicago/Turabian StyleShah, Syed Hammad Hussain, Ole-Martin Hagen Steinnes, Eirik Gribbestad Gustafsson, and Ibrahim A. Hameed. 2021. "Multi-Agent Robot System to Monitor and Enforce Physical Distancing Constraints in Large Areas to Combat COVID-19 and Future Pandemics" Applied Sciences 11, no. 16: 7200. https://doi.org/10.3390/app11167200
APA StyleShah, S. H. H., Steinnes, O.-M. H., Gustafsson, E. G., & Hameed, I. A. (2021). Multi-Agent Robot System to Monitor and Enforce Physical Distancing Constraints in Large Areas to Combat COVID-19 and Future Pandemics. Applied Sciences, 11(16), 7200. https://doi.org/10.3390/app11167200