Robots are employed to complete simple and repetitive tasks on behalf of humans. However, when production processes are modified according to production schedule or situation, some robots can no longer be used. Therefore, robots that can be deployed in different environments are being studied. A successful product of this research field is the DLR hand-arm system, a gripper consisting of a variety of joints and motors that emulate a human hand [
1]. This gripper is operated by controlling variable-stiffness structures that change the stiffness of each joint when the system grasps different objects. The DLR hand-arm system is a rigid body robot that exhibits a variety of movements such as a human arm. However, the requisite variable-stiffness structures are complex, and a control system is required to apply a specific gripping force that avoids damaging an object. Hence, different types of multifunctional robots produced in small volumes have been developed, with soft robots created from compliant materials receiving more attention than rigid-type robots, which require precise control when grasping soft objects. In contrast, a soft robot is difficult to control precisely, even though it can hold various soft objects without causing damage. Soft robots are typically controlled using either tendon-driven or pneumatic systems. An example of a research soft robot that works using tendon-driven methods is the Exo-Glove Poly and Soft gripper. Exo-Glove Poly is a wearable robot that helps disabled people who cannot move their fingers to hold objects [
2,
3]. Soft variable-stiffness grippers actuated with tendon-driven systems have been demonstrated [
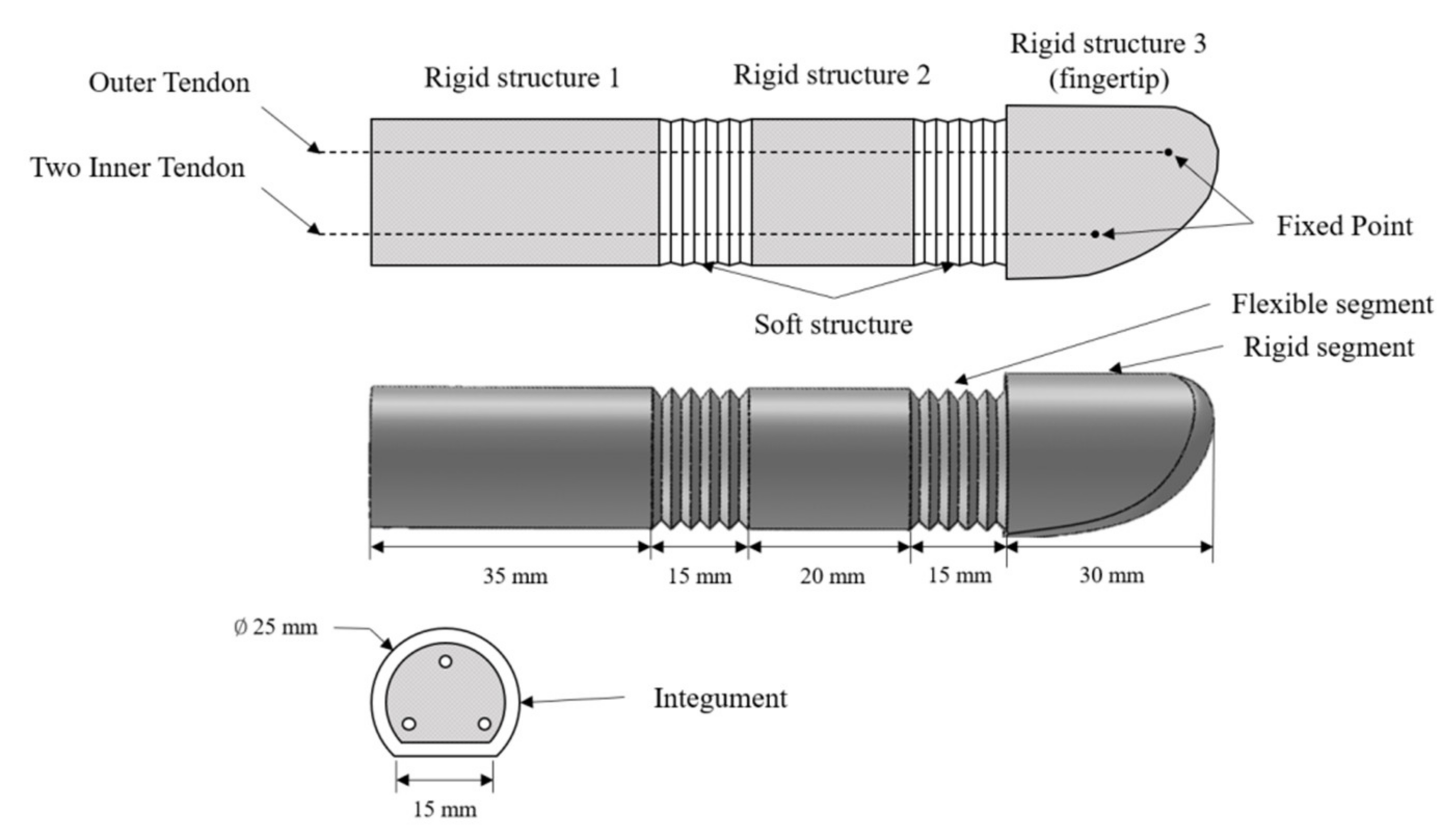
4,
5]. The variable-stiffness structures in such systems are created by securing a tendon to the tip of a rigid structure and passing tendons through soft and rigid structures. Stiffness, controlled by pulling and releasing a tendon, increases nonlinearly when a tendon is pulled while the soft structure is compressed. The dynamic motion of the system can be varied using the placement of tendons. The performance of this type of soft grippers has been verified in experiments in which objects such as spheres, square columns, and bottles containing two liters of water were gripped. Two liters of water was the maximum gripping load of the gripper [
5]. Pneumatic soft robots, exemplified by the gripper robot of Soft Robotics Inc. (Bedford, MA, USA) [
6] and multigait robot [
7], are controlled by adjusting the air pressure in pneumatic chambers. Each chamber is arranged with the soft gripper as a finger on a larger hand structure, enabling the robot to grasp objects when pneumatic pressure is adjusted. With the multigait robot, the air path in each embedded chamber is designed to enable dynamic motion when the system is inflated. This method has the advantage of reducing the size of the system. Other methods for actuating soft robots include the use of chemical reactions [
8], material properties [
9], and shape memory alloys [
10]. A soft robot that utilizes chemical reactions for actuation is the Octobot. With this robot, fuel placed in a configured chamber is decomposed by a catalyst, and the resulting gas expands the chamber, thus driving the robot. The material-actuated jamming gripper [
9] consists of a pocket containing granular particles. In an uncompressed state, the pocket wraps around objects with which it is in contact. Grip action is subsequently activated by applying a vacuum to the pocket and compressing the gas between the granular particles, which fixes the pocket to the desired object. Movement with Wang et al.’s gripper [
10] depends on the magnitude and location of the temperature applied to the shape memory alloy from which it is created. Methods using chemical reactions, materials properties, and shape memory alloys have the disadvantage of slow operation. In addition, the pneumatic control robot has a complicated process in manufacturing the chamber, and it is difficult to repair the chamber when it is damaged. The tendon-driven control method is more advantageous to construct a system that is more compact than the pneumatic control method. If a soft gripper that implements a strong force through a pneumatic-driven method, a larger pneumatic pump is needed. On the contrary, the tendon-driven method using motors has the advantage of being able to make a compact system with a large gripping force. The forces generated by pneumatically controlled robots are limited by the size of the pump and the pressure the material can sustain. In addition, creating compact pneumatic systems is difficult, as pumps are not easily miniaturized. Thus, tendon-driven soft grippers are more prevalent, as the system’s stiffness can be varied. If the stiffness of the system increases, the gripping force increases, so the weight of the object that the soft gripper can lift increases. However, if these soft grippers gripped objects of more than 2 kg, they would slide due to a weight greater than the maximal static friction force. Therefore, to improve the performance of the soft gripper, it is necessary to monitor the grip of the soft gripper to make sure that it is gripping within the gripper system state.
The rigid condition of typical sensors has limited the ability to monitor grip forces. Because these sensors have a fixed shape, they cannot always produce accurate outputs for every action completed, as their shape can differ from that of the gripper. Soft sensors that conform to the shape of a gripper provide a solution for this discrepancy of shape. A range of soft sensors for monitoring gripping forces has been studied. Reference [
11] describes a soft sensor consisting of hydrophilic PTFE as the sensitive dielectric element of the relative humidity–based grasp sensor. In contrast, [
12] describes a capacitive strain sensor for force monitoring created by combining silicone and fabric, providing a larger capacity and stiffness than fiber-based sensors and a larger elastic range than silicone-based sensors. Sensors that use EGaIn, a liquid eutectic mixture of gallium and indium as a sensing element, have also been studied. To respond to microstrain, Chen et al., developed an EGaIn sensor with a wavy pattern to reduce hysteresis [
13]. Kramer et al., improved the sensing response of their EGaIn sensor by applying pressure to it through a rigid structural block [
14]. Park et al., designed their EGaIn sensor path to be thin and fabricated the sensor as a multilayer structure to increase its responsiveness [
15]. Finally, Chossat et al., produced a hybrid soft elastomer strain sensor in which signal routing was isolated from detection, such that the sensor reacted less sensitively to unnecessary stresses on wiring [
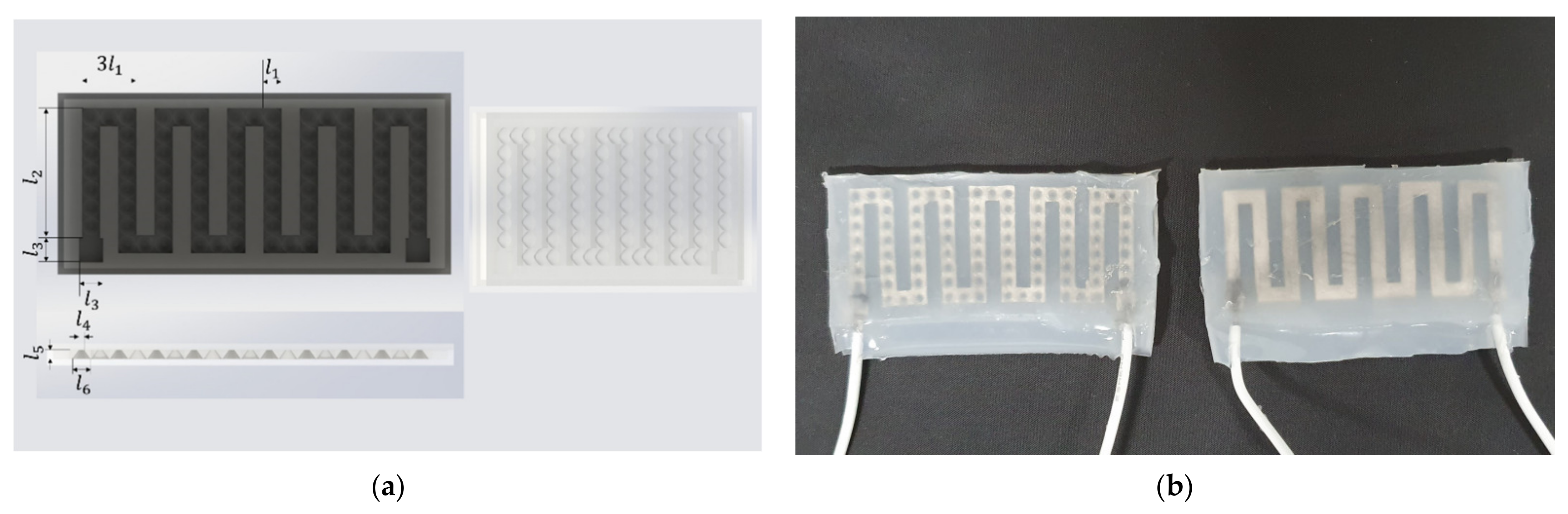
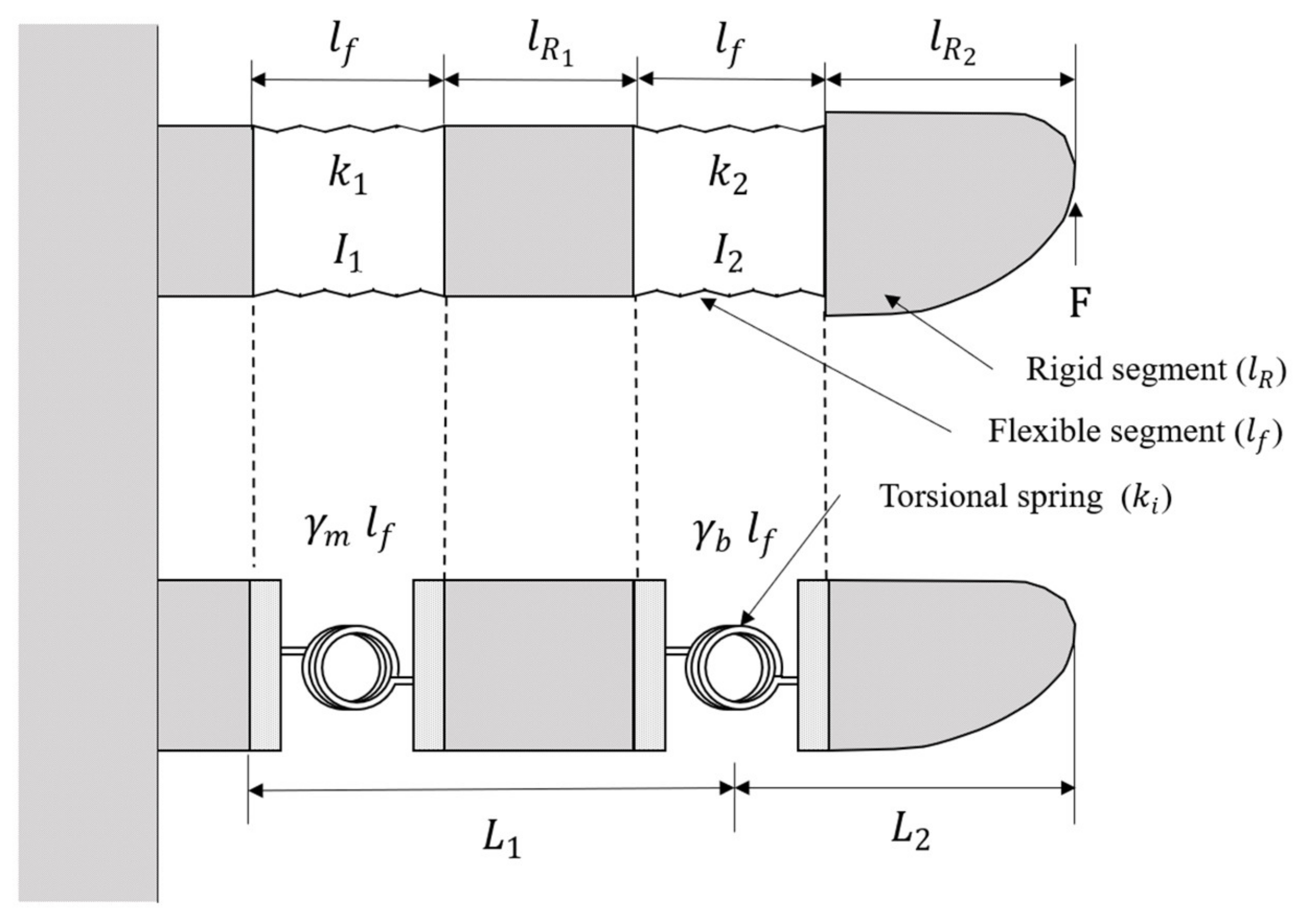
16]. In this paper, a silicone integument was added to the gripper to increase the gripping friction force. Various soft sensors have been considered for application to the integument of this gripper fingertip. Therefore, there is a need for a manufacturing method that can be easily applied to the curved shape and integument of the soft gripper fingertip. The manufacturing method of the EGaIn soft sensor is made easy by injecting EGaIn into a fabricated path. In addition, EGaIn is suitable because of its high conductivity and the small number of processes required for fabricating the soft sensor. The soft gripper is designed based on previous studies [
4,
5] that performed the optimal design of variable-stiffness soft grippers. The previous study established the basis of the characteristics of each parameter of the variable-stiffness structure and the shape of the gripper.
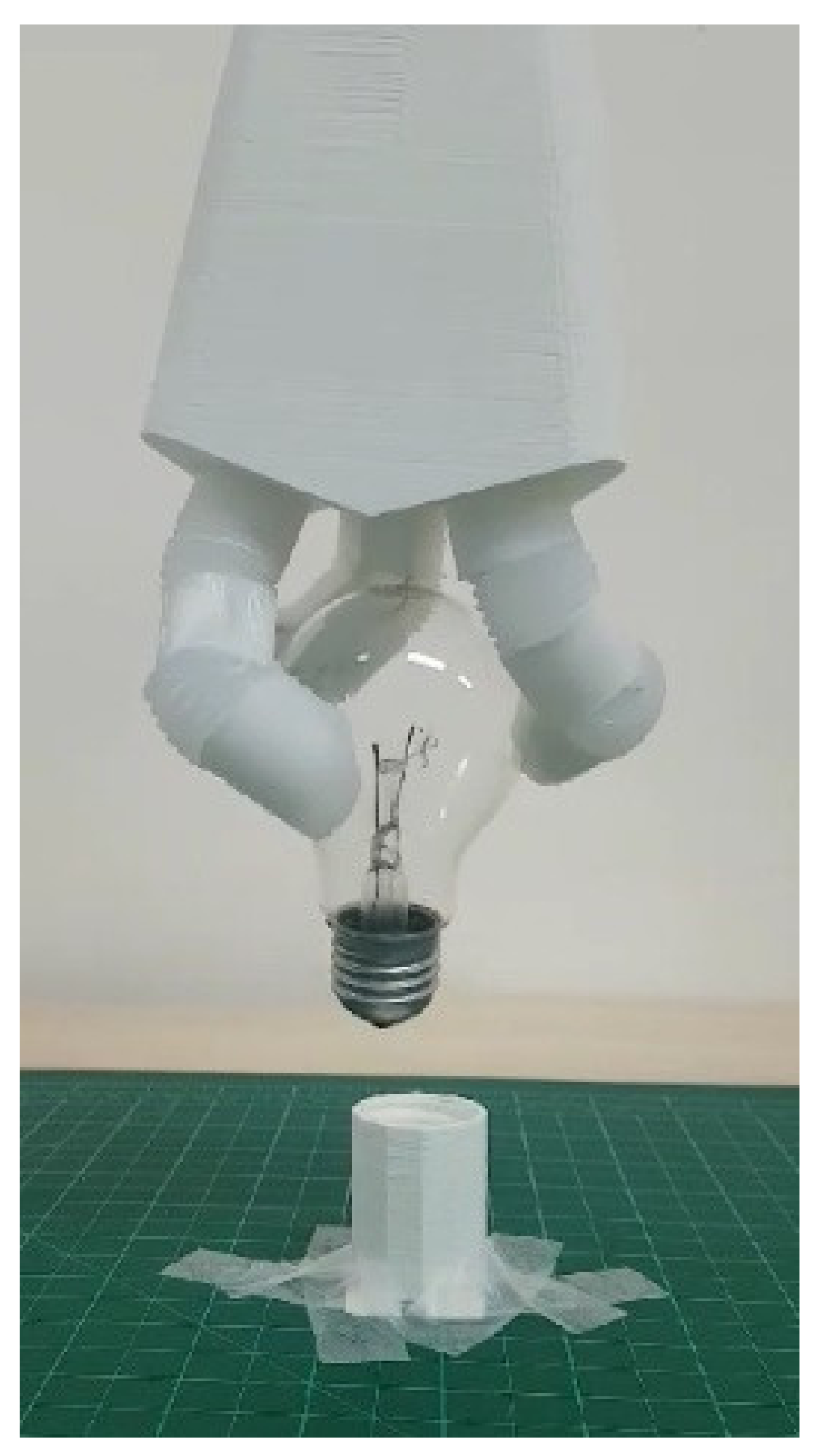
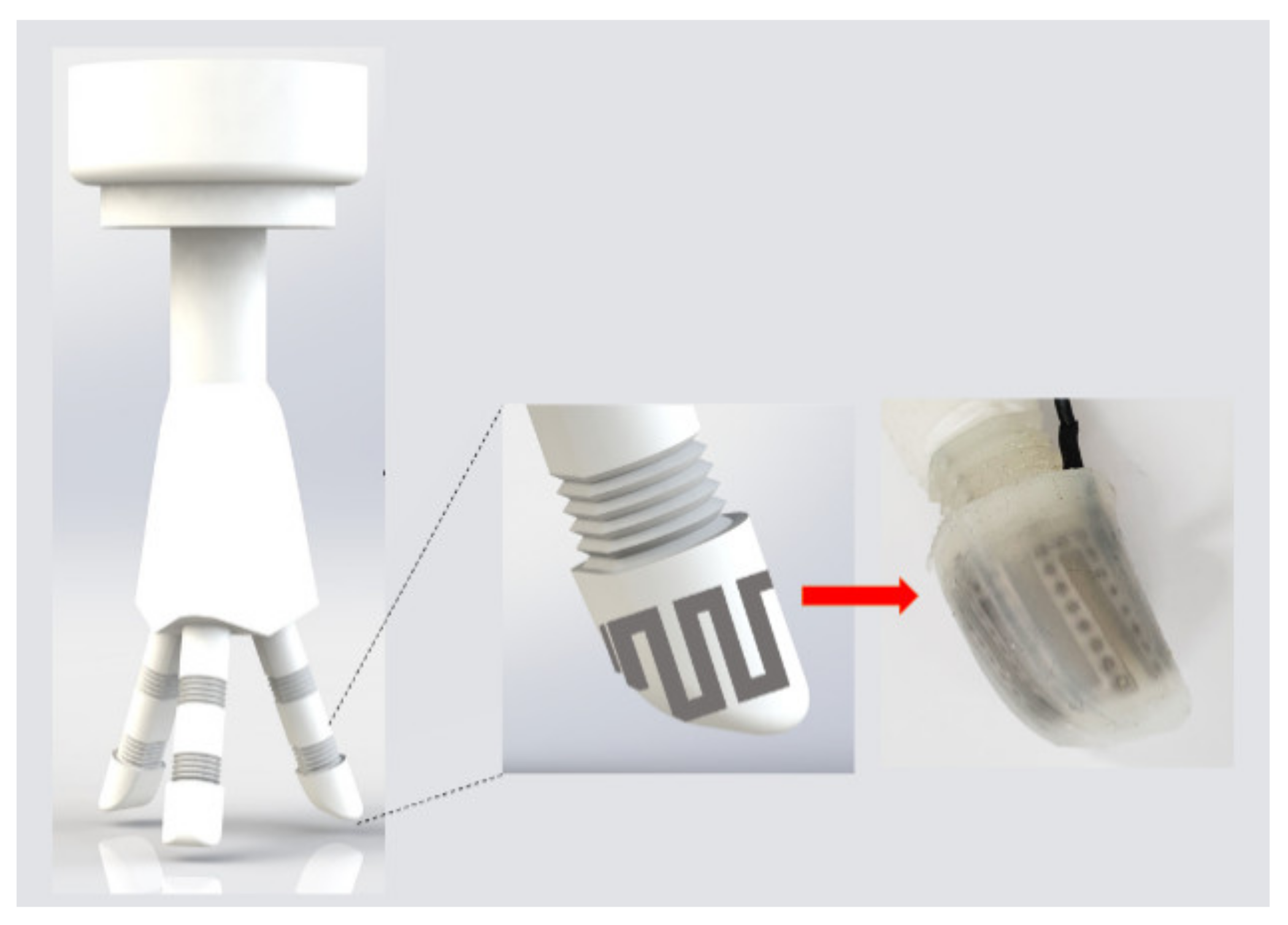
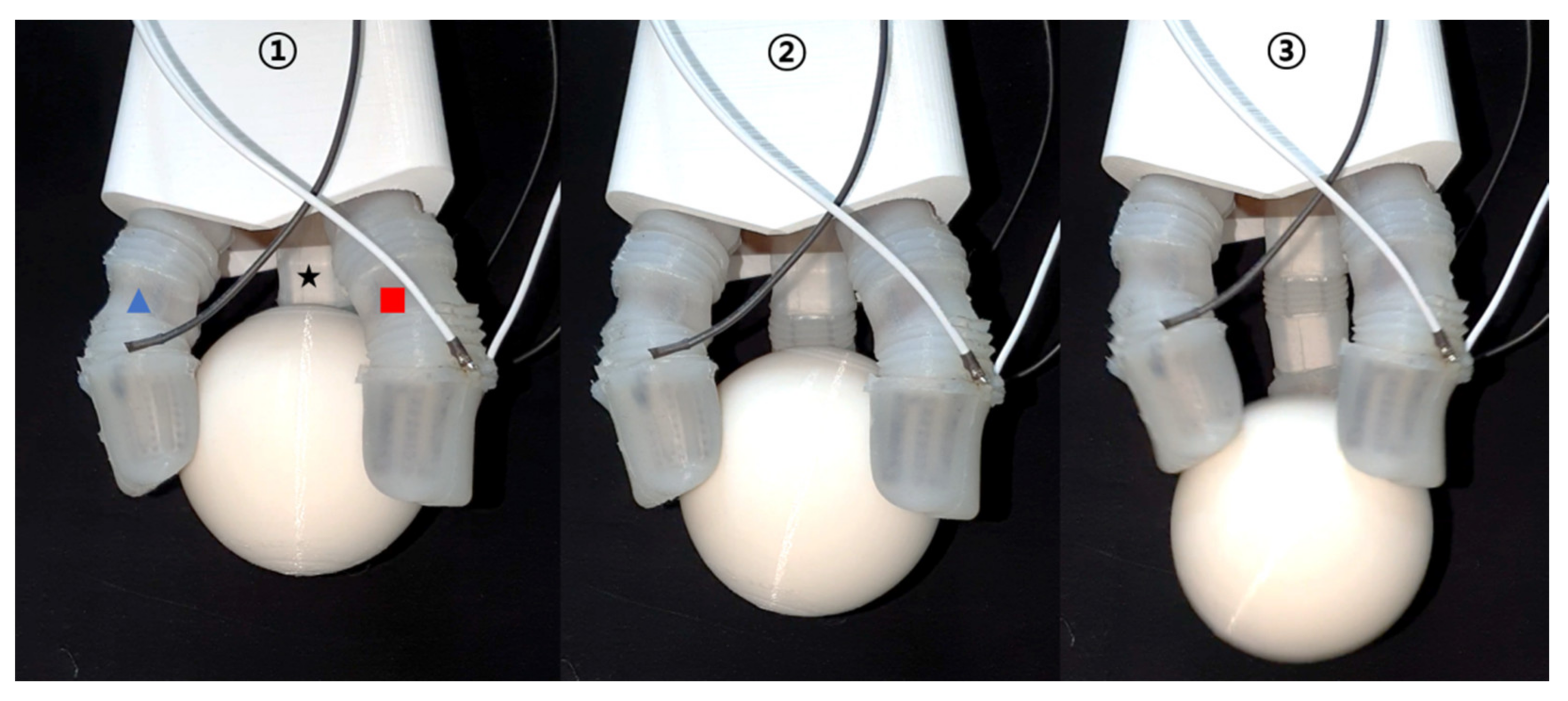
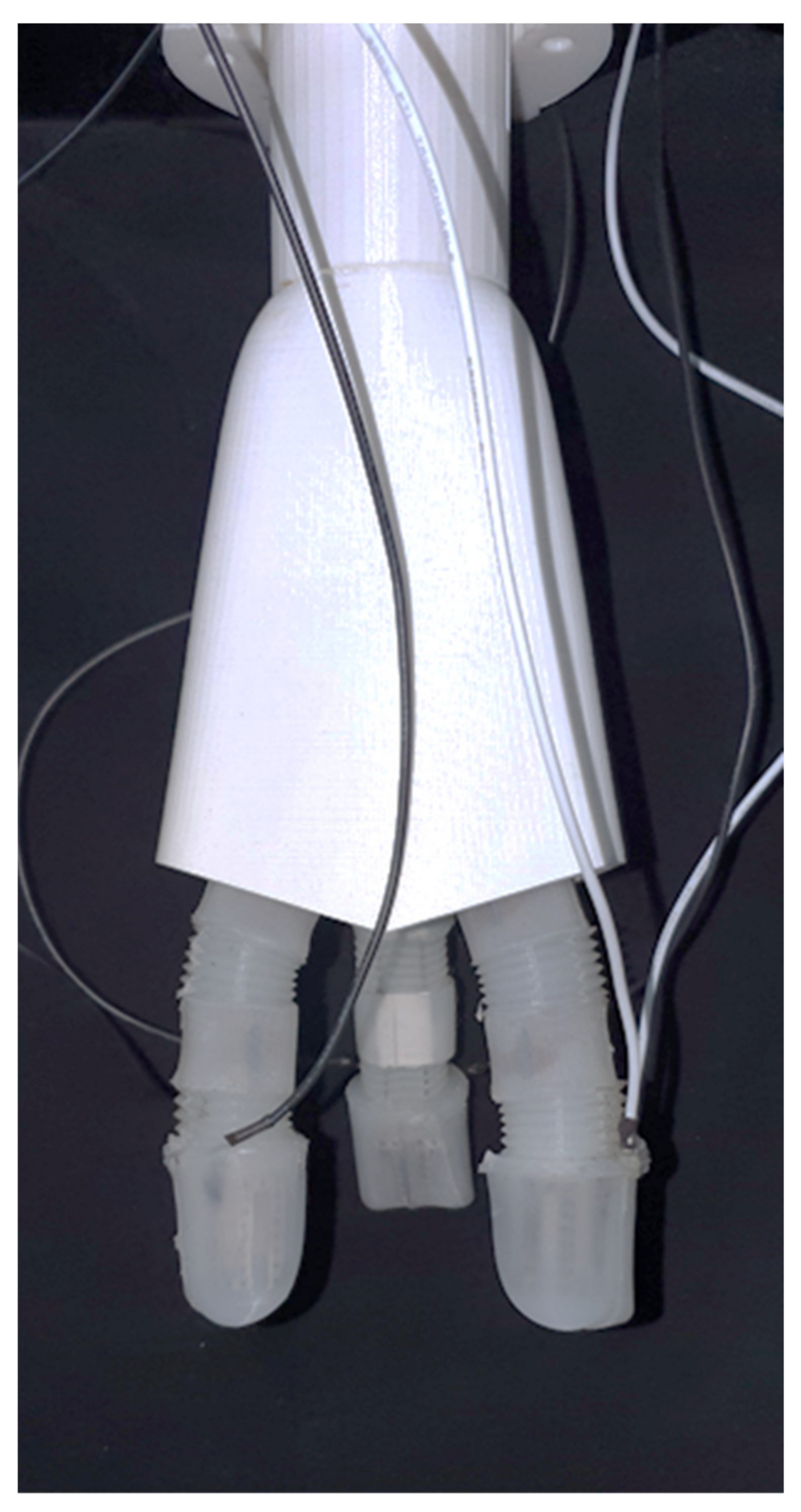
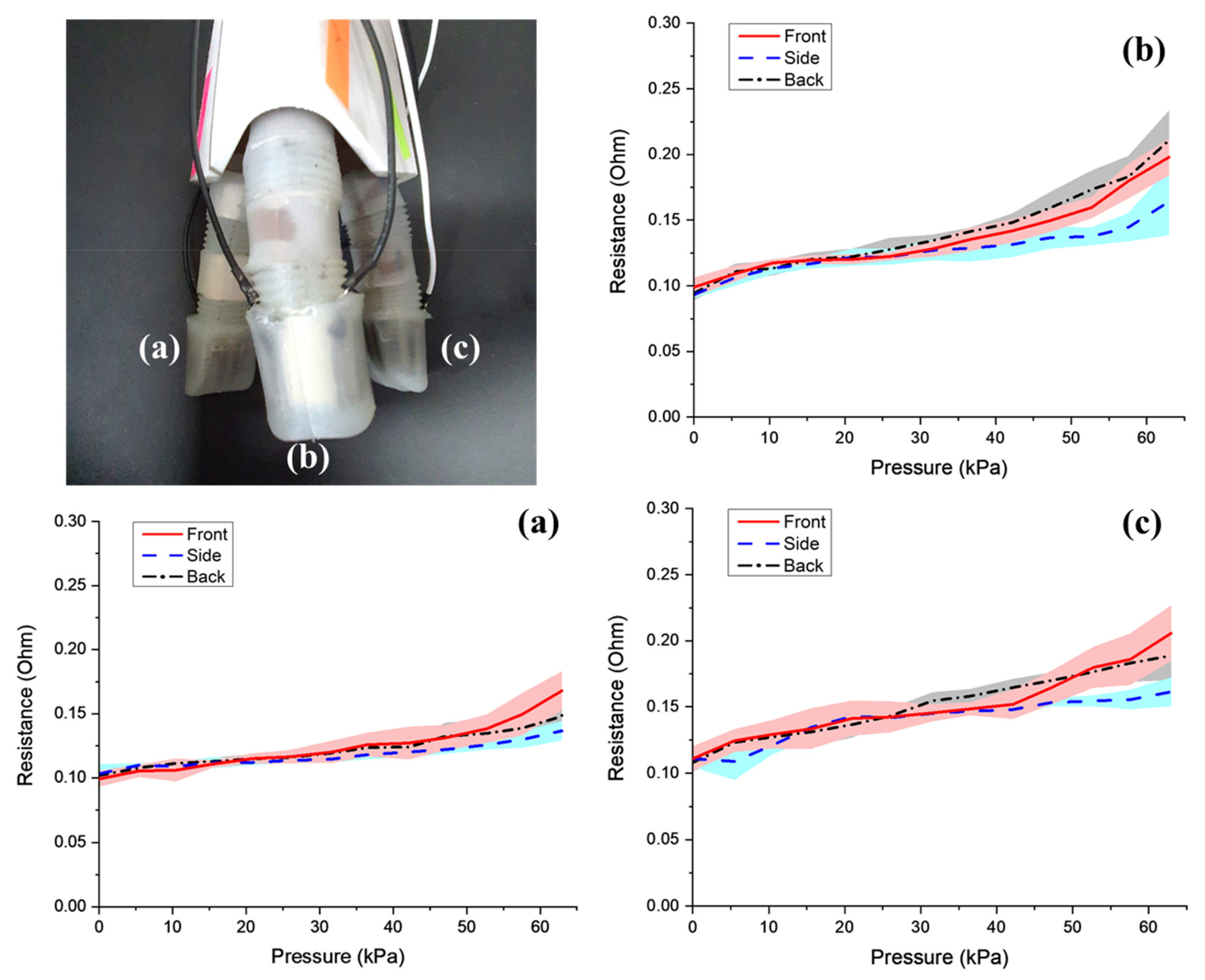
In this study, a soft gripper with a variable-stiffness structure driven by a tendon was characterized based on the deformation according to the gripping target. This gripper was applied with an EGaIn soft sensor at the end of the grip to increase the gripping freedom and detect the state of the object grip. This EGaIn soft sensor measures the gripping force applied to an object, and the performance of the sensor was verified through an experiment to monitor the sensing response. The soft gripper is capable of autonomous gripping that enables it to firmly fix various objects without damage by checking the sensing value, grasping the grip state, and adjusting the appropriate gripping force. The weight of the gripping target could be inferred from the sensor’s value, and the verification confirmed that an autonomous grip that can firmly grip various objects without damage was possible.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}