
Dynamic Aeroelastic Response of Stall-Controlled Wind Turbine Rotors in Turbulent Wind Conditions


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The Numerical Model
3. Reduced-Order Characterization of the Aero-Structural Interaction
3.1. Objectives and Methodology
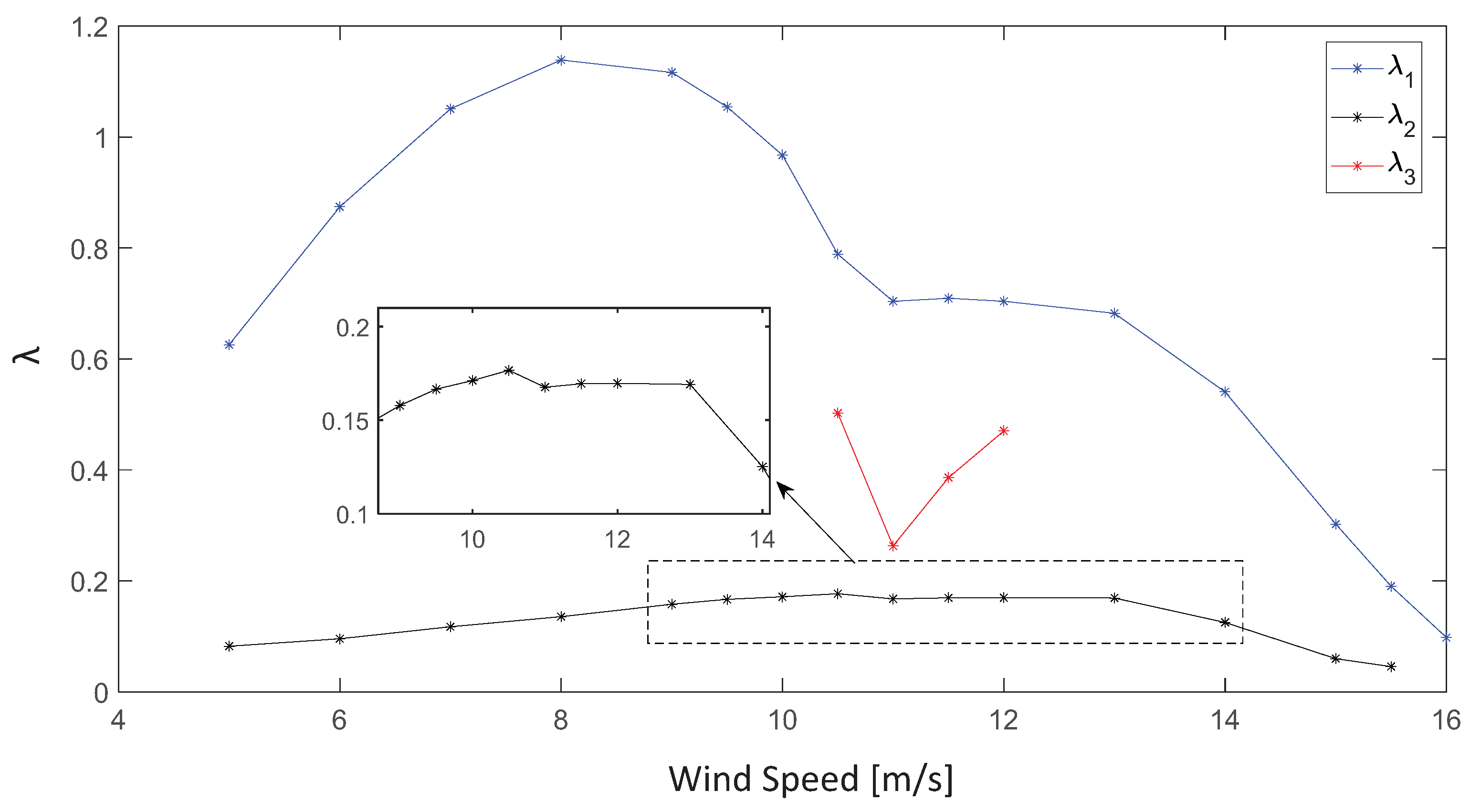
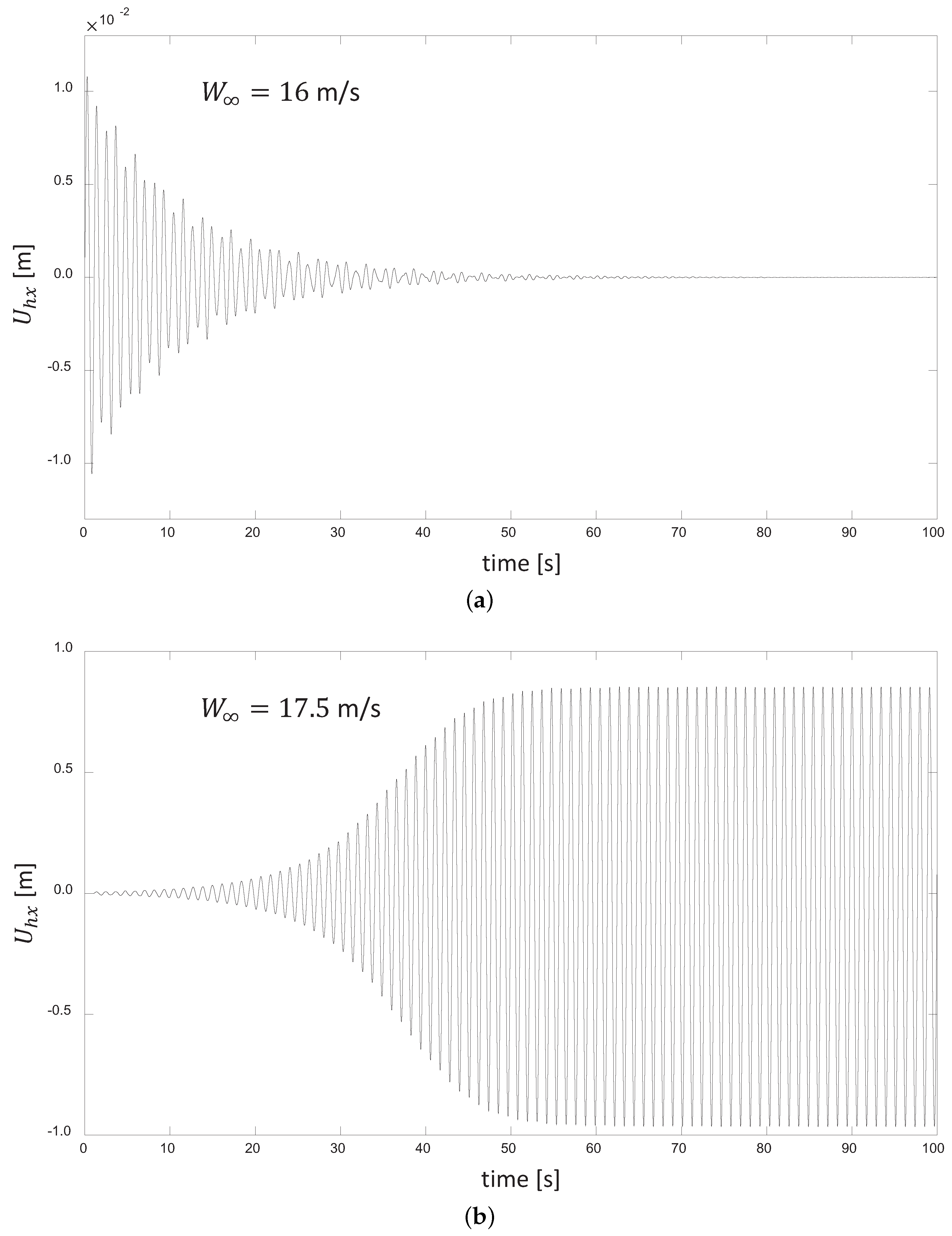
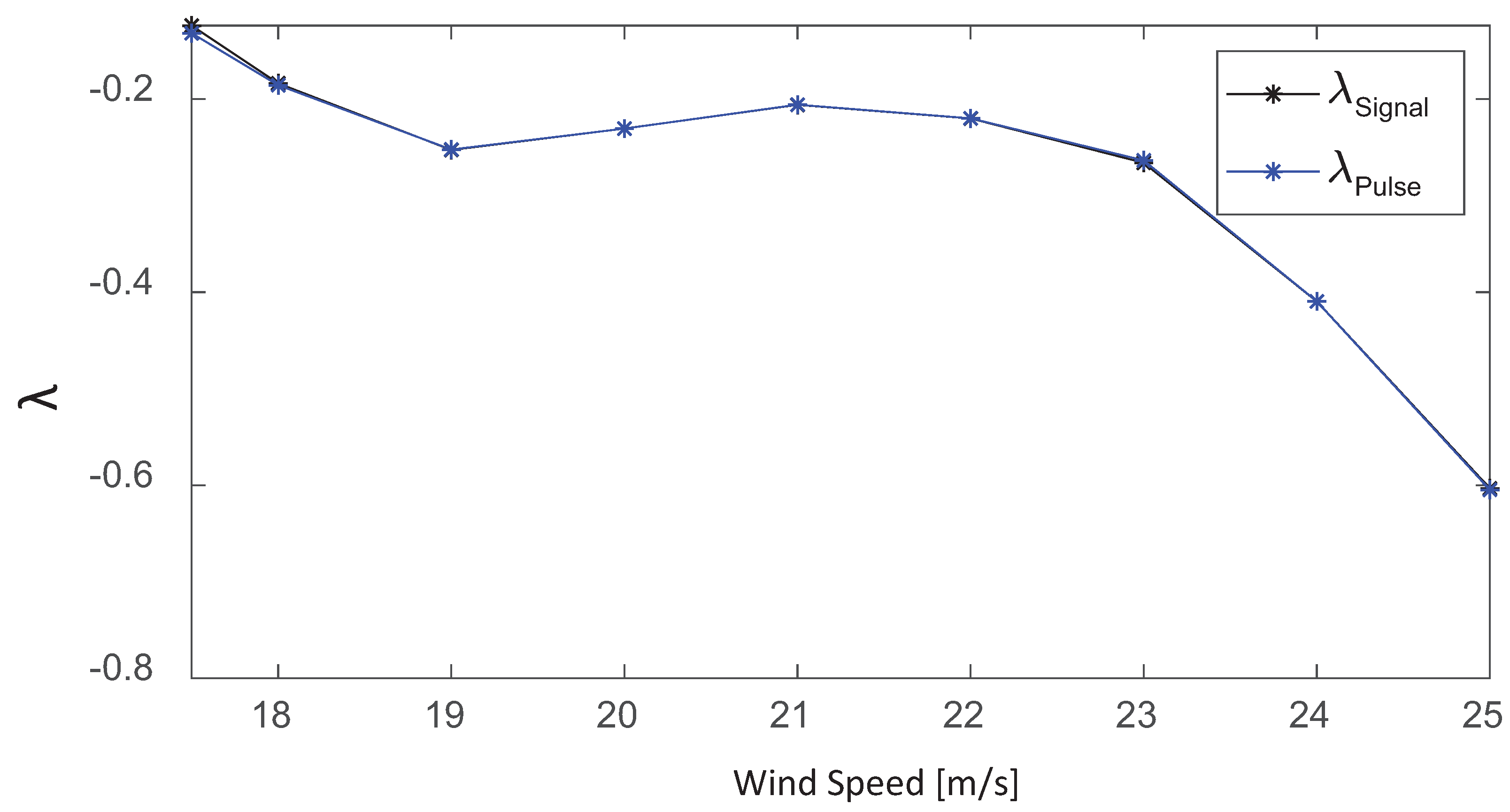
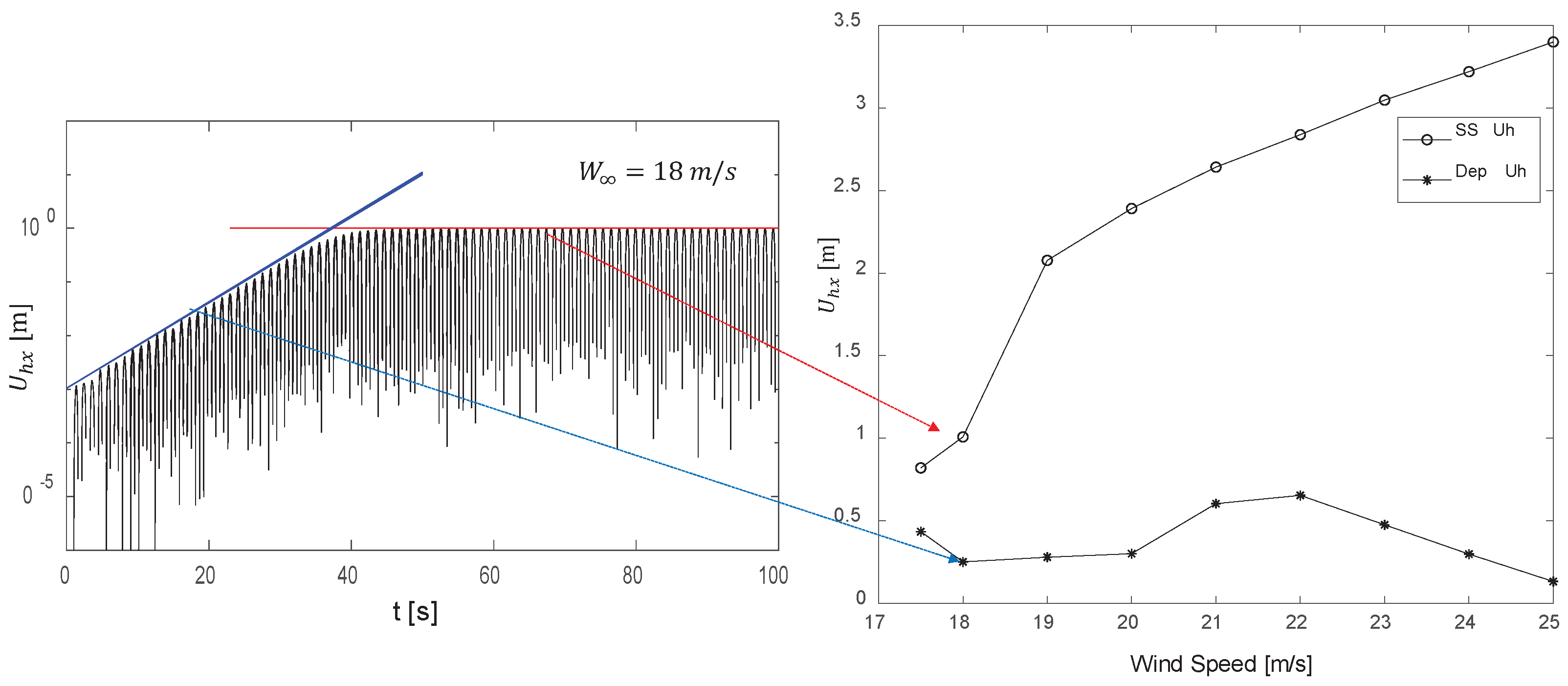
3.2. Wind-Speed Stability Threshold and the Role of Aerodynamic Damping
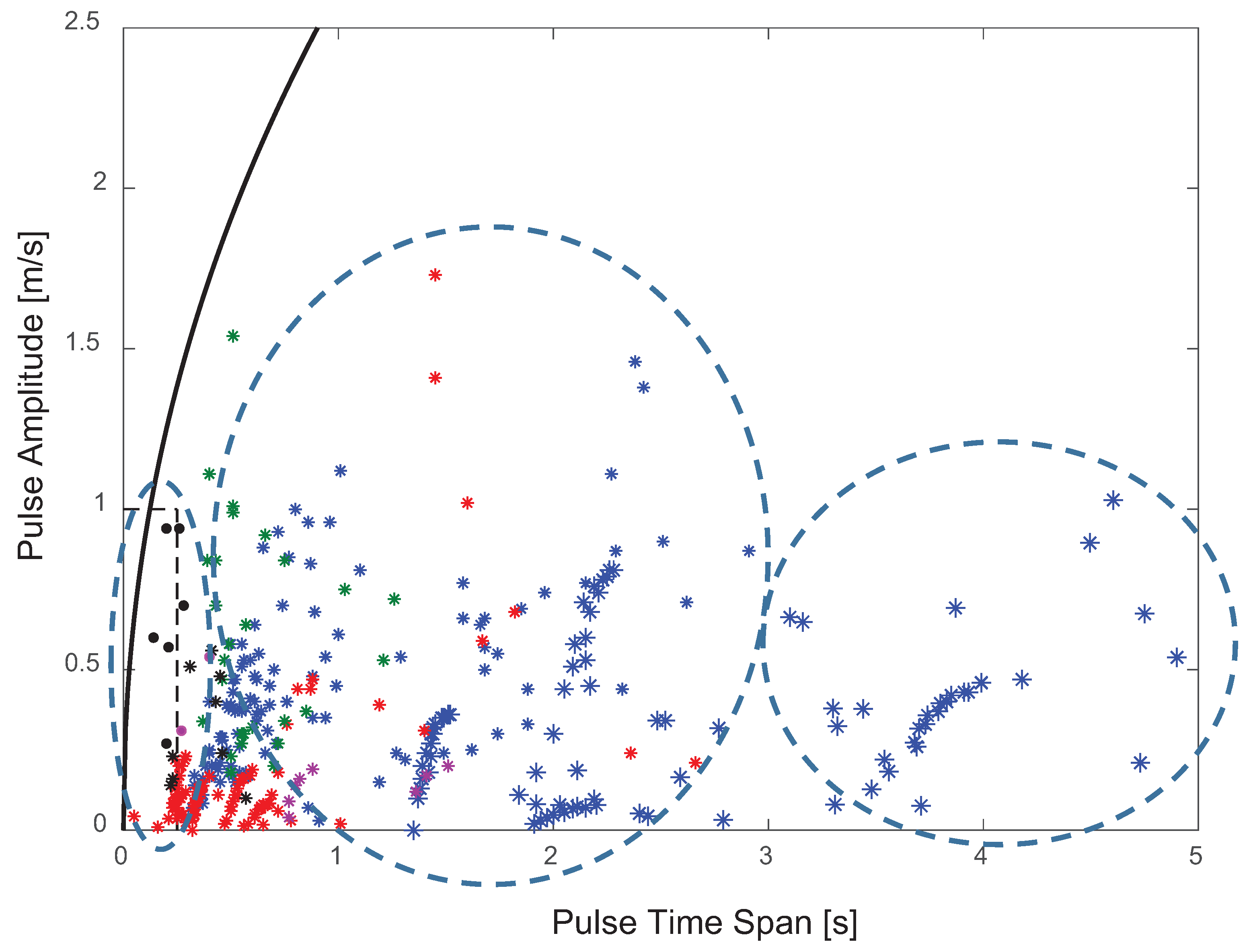
3.3. Characterization of Pulses Representing Typical Atmospheric Flow Oscillations
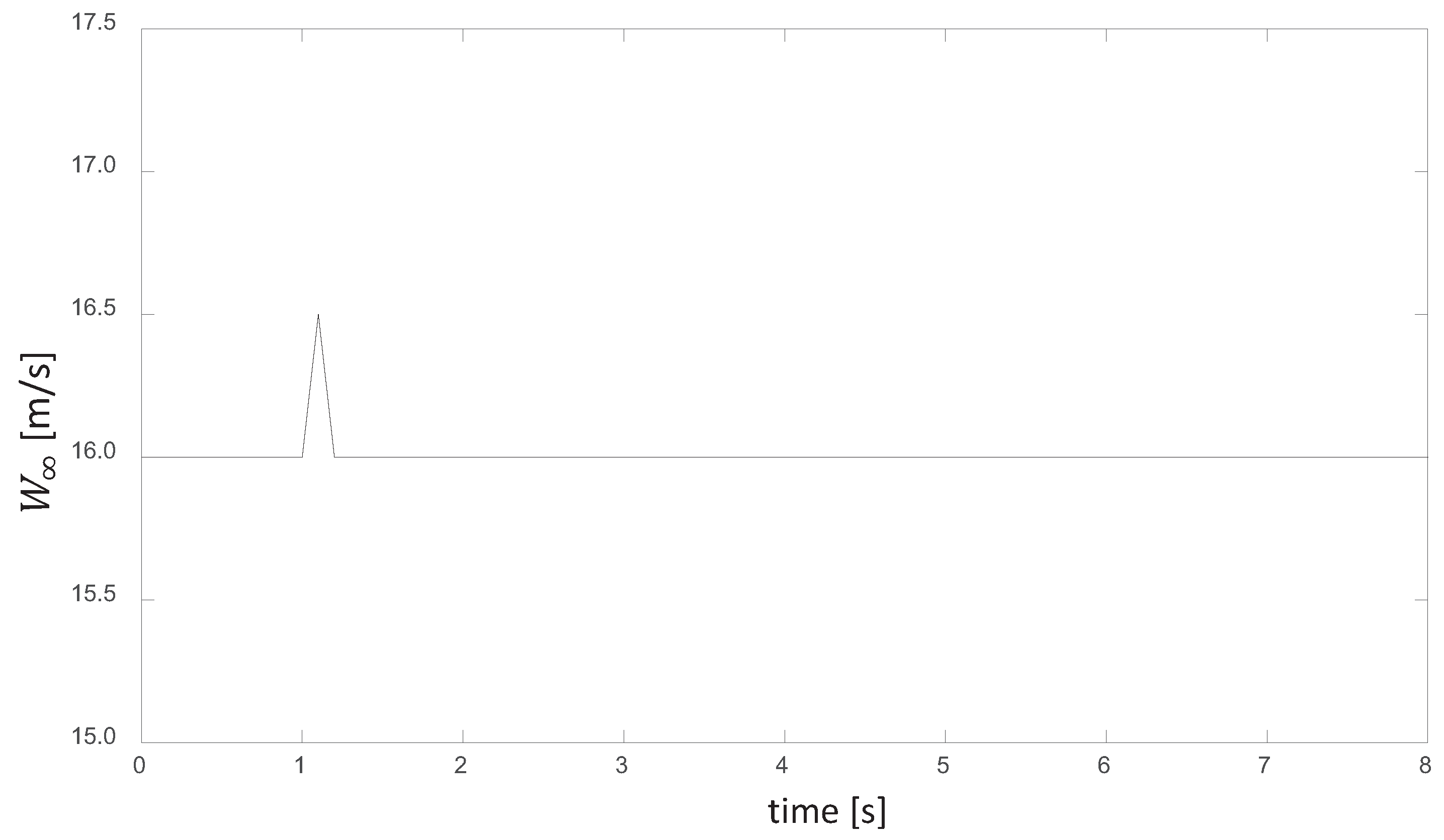
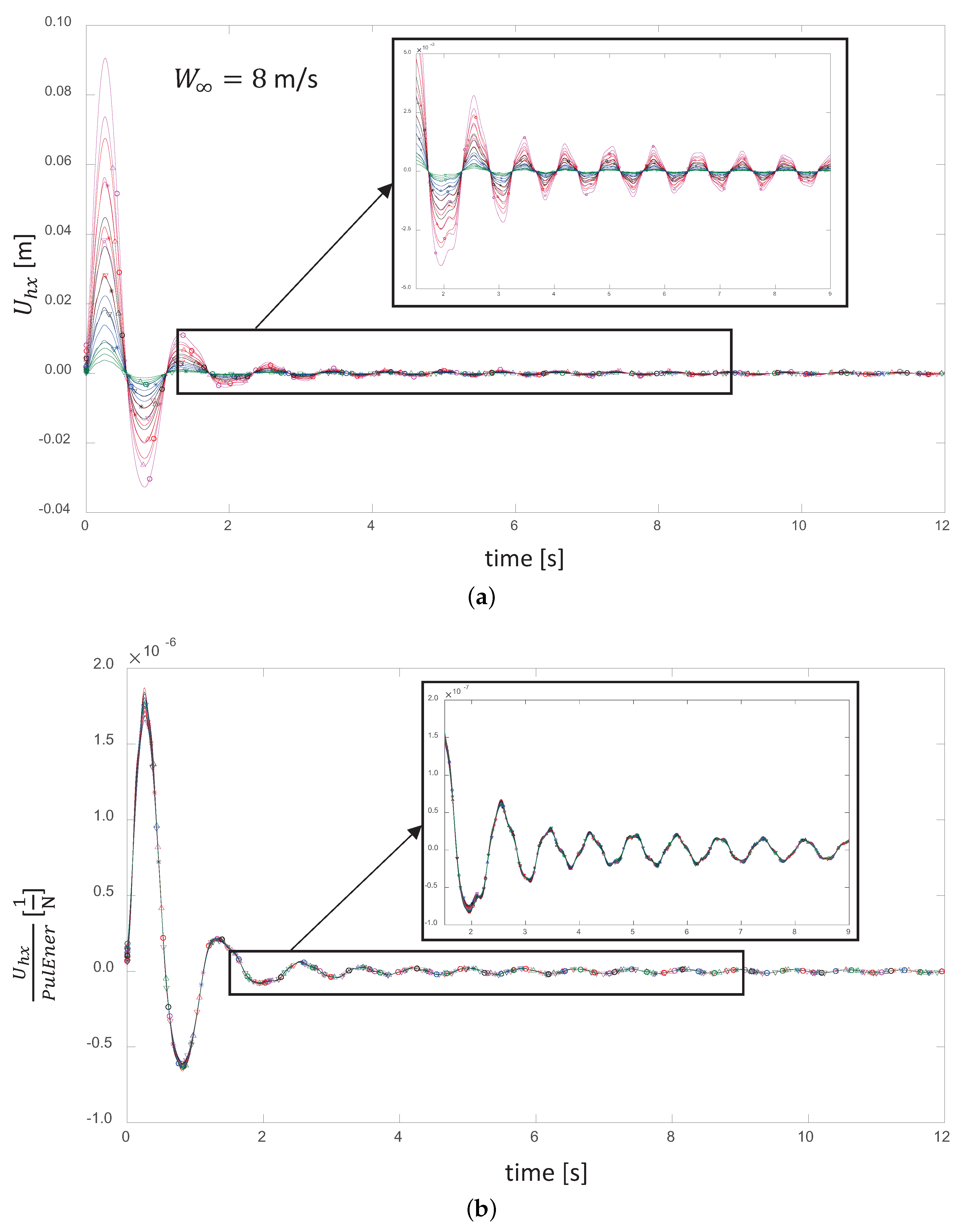
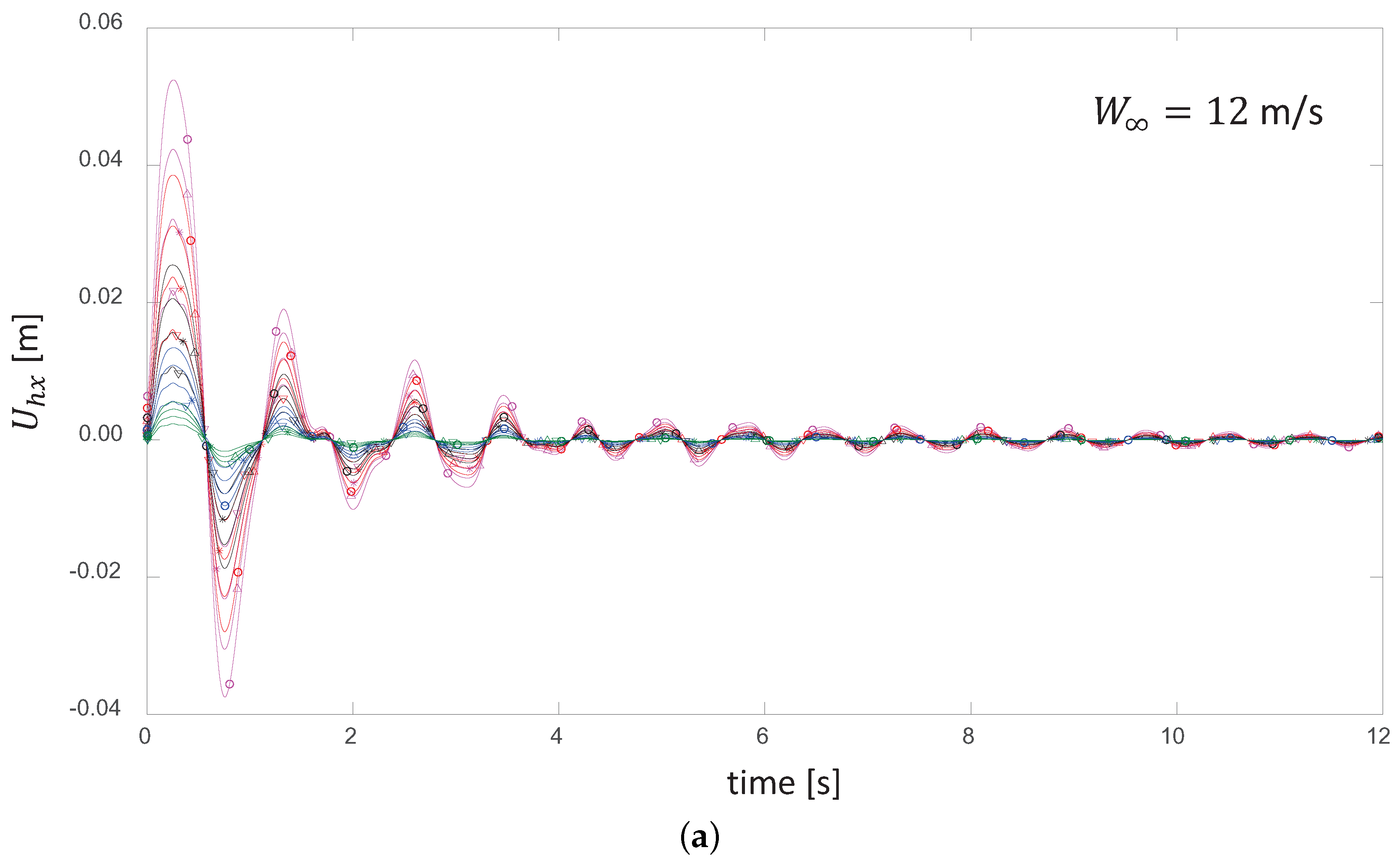
- Short pulses (associated with wind flow turbulence): These are characterized by pulses that are short enough that they end before the first peak in the blade oscillation occurs. After a very short initial time when the blades start displacing and accumulating energy by their own inertia, they deflect to a maximum, and the kinetic energy content of the wind pulse is accumulated as blade elastic deformation. The energy transfer and subsequent evolution can be characterized only by measuring the instantaneous blade deflection.
- Pulse-duration transitional zone: This is characterized by pulses that are long enough that energy dissipation by aerodynamic damping occurs during the duration of the pulse itself (i.e., only part of the pulse energy goes into elastic energy). Energy transfer and evolution can no longer be characterized only by measuring blade deflection.
- Long pulses: These are characterized by pulses that are long enough that they act as gradual variations in the kinetic energy of the flow that are absorbed by the rotor, inducing very small (or even negligible) oscillations.
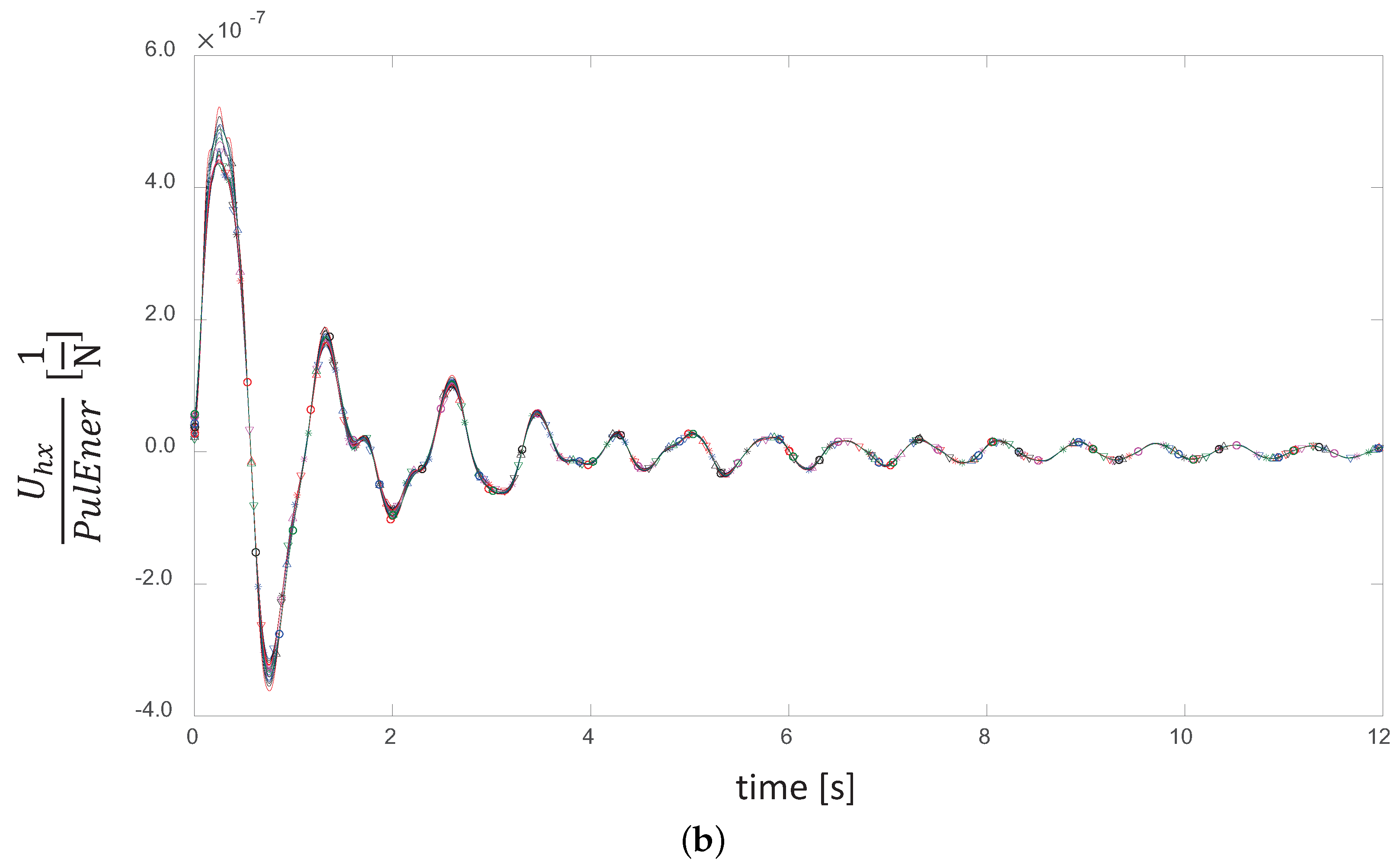
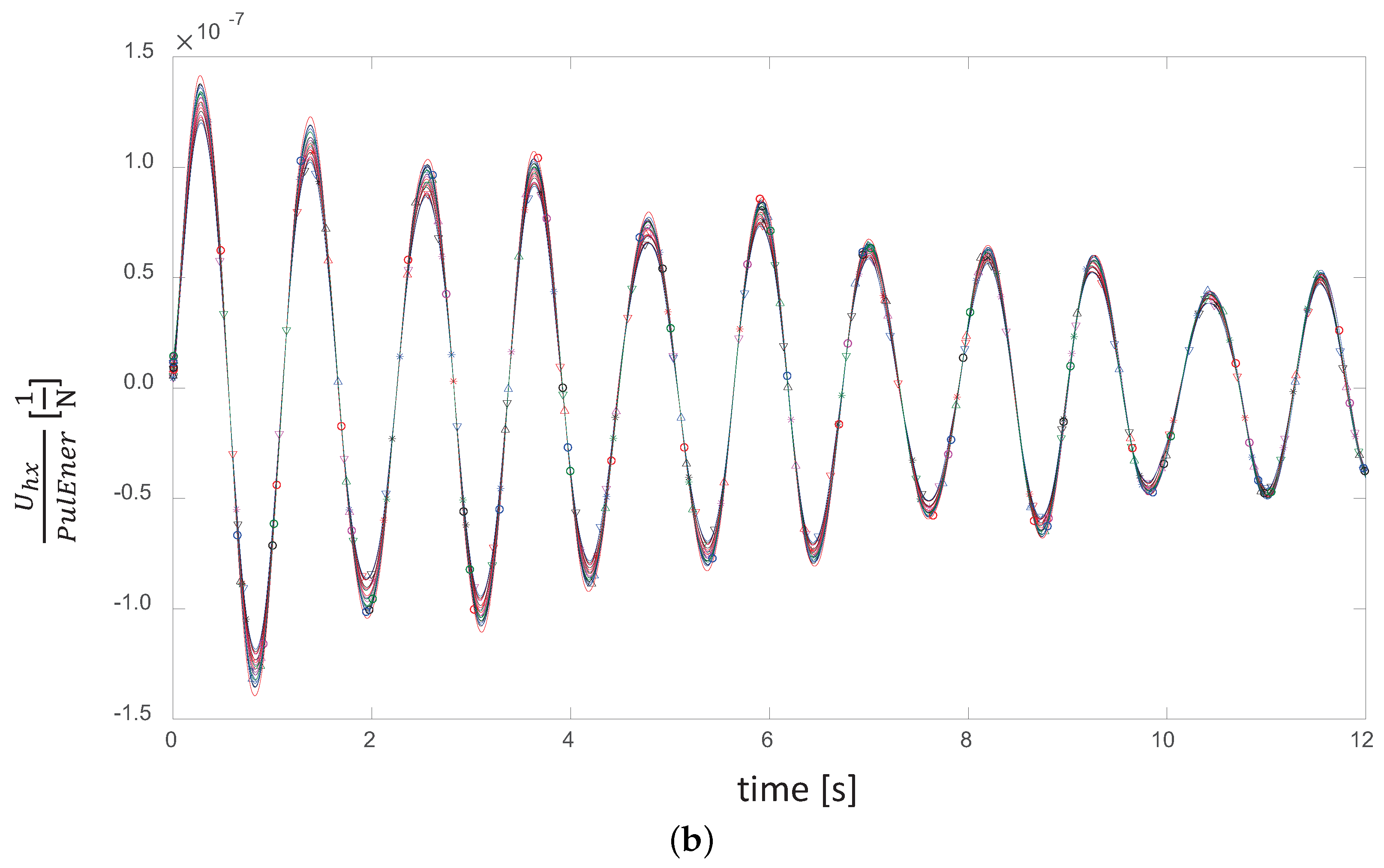
4. Energy-Transfer Characterization of the Pulse (Stable Oscillatory Regime)
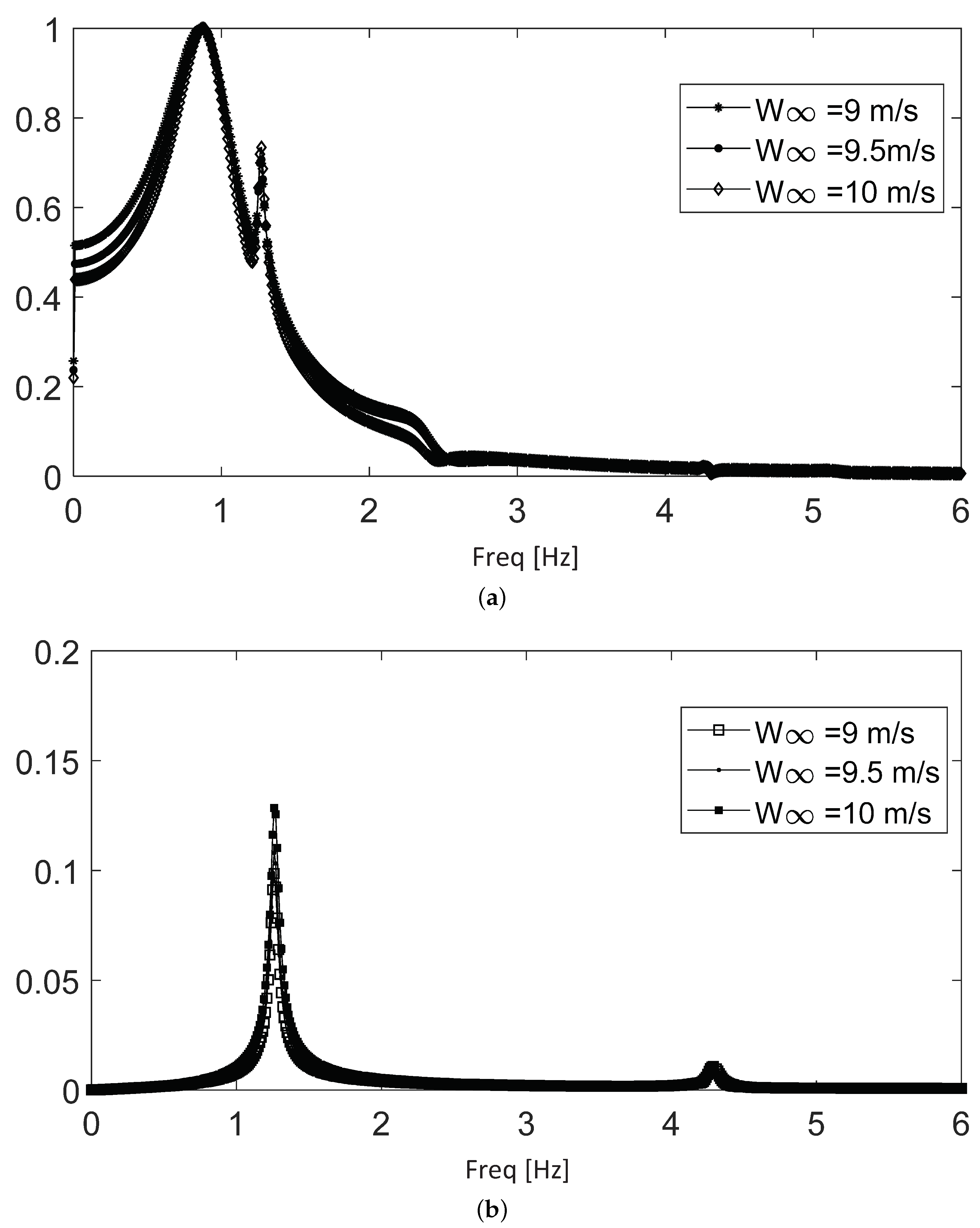
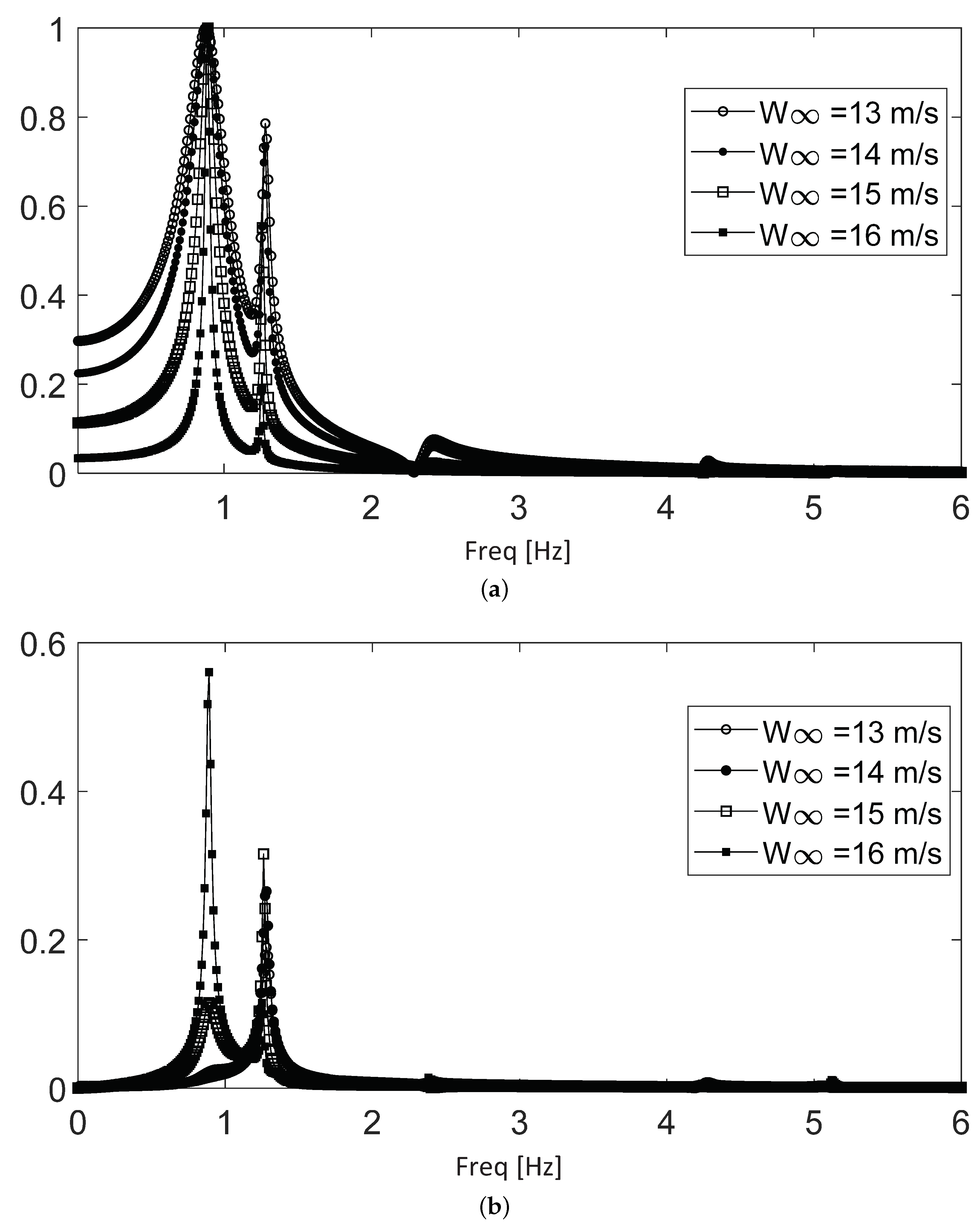
Frequency Content in the Stable Oscillatory Regime
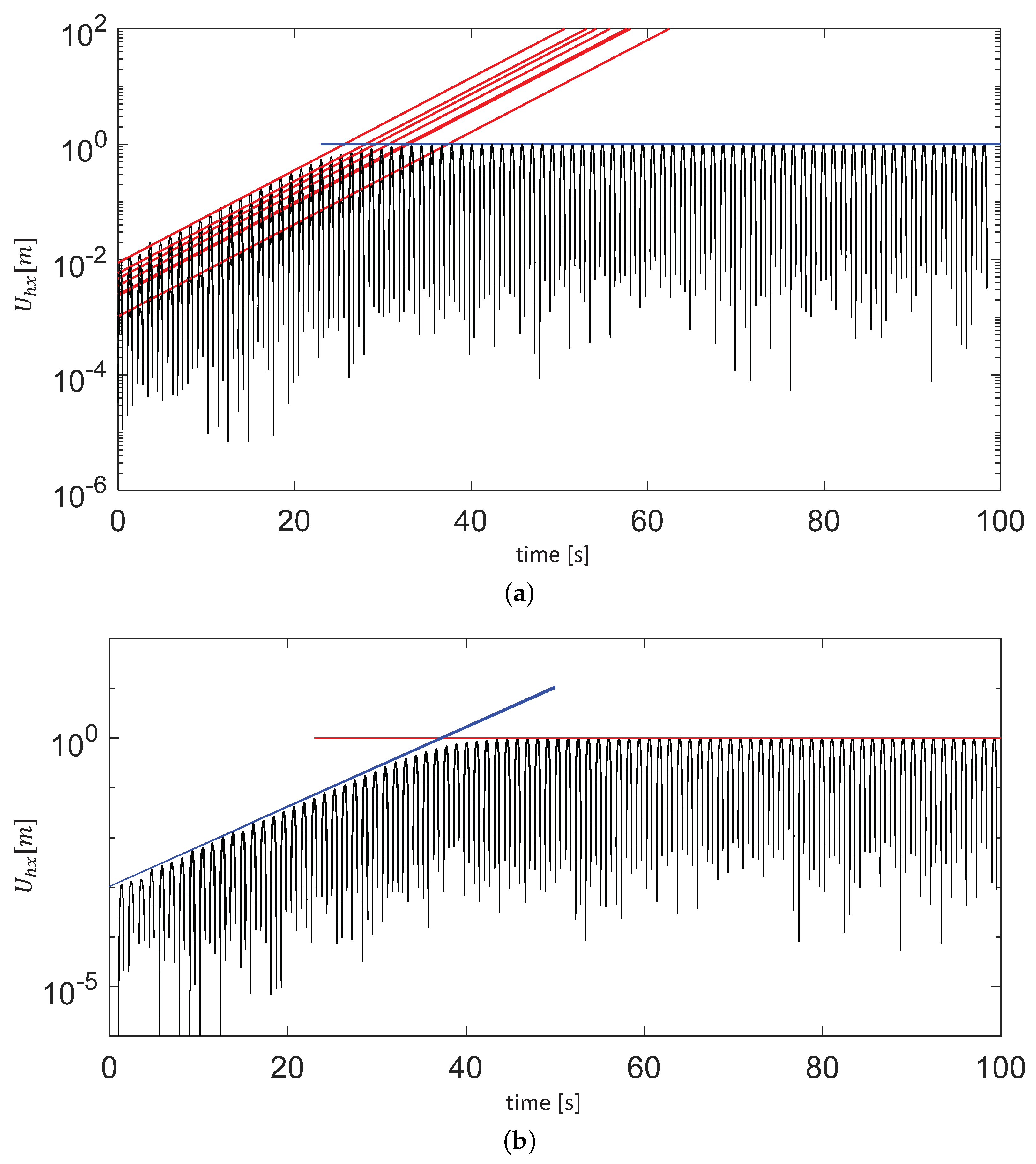
5. Energy-Transfer Characterization of the Pulse (Unstable Oscillatory Regime)
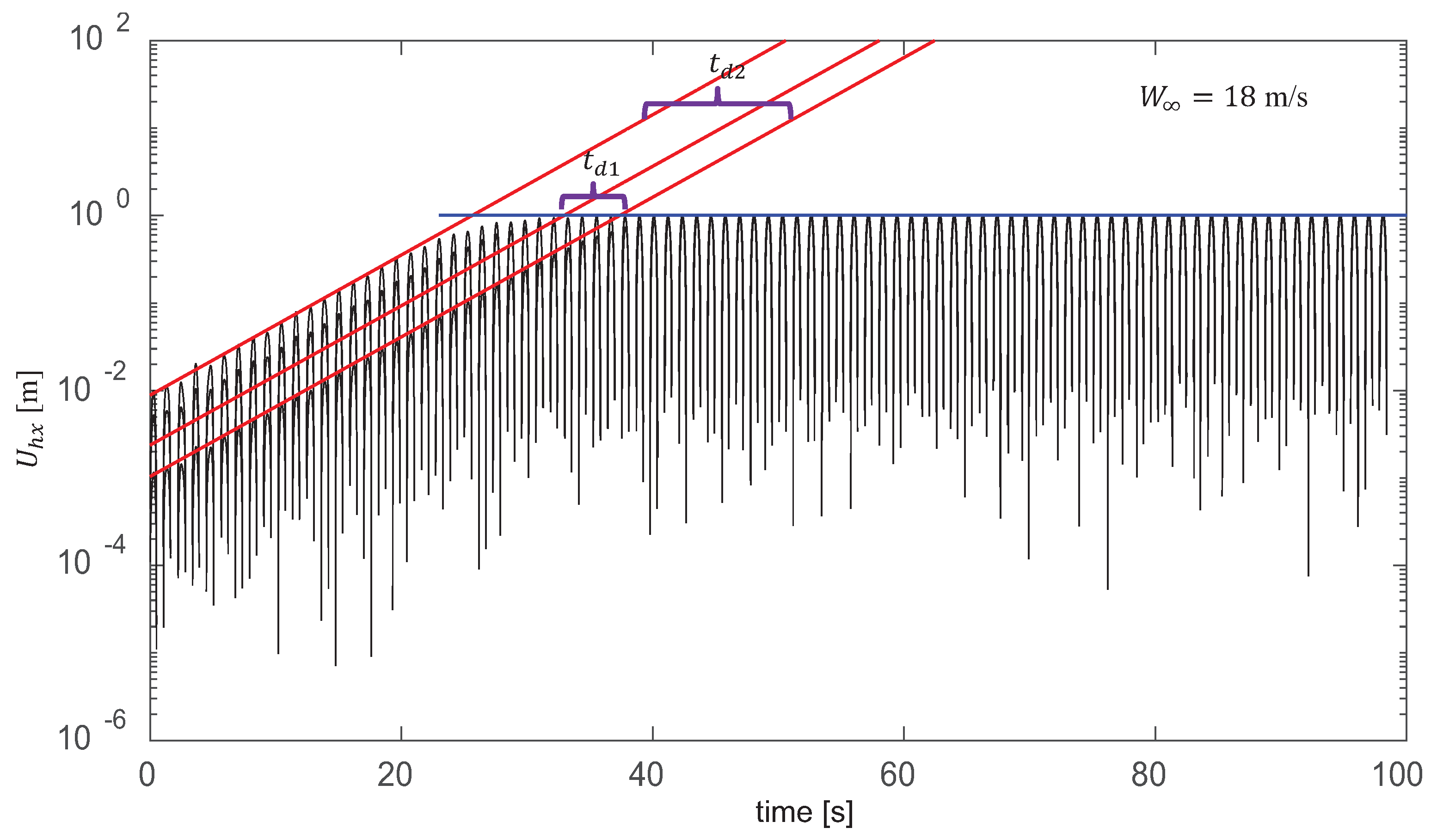
5.1. Validation for the Unstable Regime of the Hypothesis Connecting the Time Delay and the Kinetic Energy Content of the Pulse
5.2. Stabilization of the Oscillatory Amplitude of the Unstable Regime
6. Concluding Remarks
Author Contributions
Funding
Conflicts of Interest
References
- Fichaux, N.; Beurskens, J.; Jensen, P.H.; Wilkes, J.; Frandsen, S.; Sorensen, J.; Eecen, P.; Malamatenios, C.; Gomez, J.; Hemmelmann, J.; et al. Upwind: Design limits and solutions for very large wind turbines. Sixth Framew. Programme 2011, 1037, 042020. [Google Scholar]
- Lalor, G.; Mullane, A.; O’Malley, M. Frequency control and wind turbine technologies. IEEE Trans. Power Syst. 2005, 20, 1905–1913. [Google Scholar] [CrossRef]
- Senjyu, T.; Sakamoto, R.; Urasaki, N.; Funabashi, T.; Fujita, H.; Sekine, H. Output power leveling of wind turbine generator for all operating regions by pitch angle control. IEEE Trans. Energy Convers. 2006, 21, 467–475. [Google Scholar] [CrossRef]
- Barlas, T.K.; Van Kuik, G.A.M. State of the art and prospectives of smart rotor control for wind turbines. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2007; Volume 75, p. 012080. [Google Scholar]
- Wingerden, J.W.V.; Hulskamp, A.W.; Barlas, T.; Marrant, B.; Kuik, G.A.M.V.; Molenaar, D.P.; Verhaegen, M. On the proof of concept of a ‘smart’ wind turbine rotor blade for load alleviation. Wind. Energy 2008, 11, 265–280. [Google Scholar] [CrossRef]
- Bianchi, F.D.; De Battista, H.; Mantz, R.J. Wind Turbine Control Systems: Principles, Modelling and Gain Scheduling Design; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Muljadi, E.; Pierce, K.; Migliore, P. Control strategy for variable-speed, stall-regulated wind turbines. In Proceedings of the 1998 American Control Conference. ACC (IEEE Cat. No.98CH36207), Philadelphia, PA, USA, 26 June 1998; Volume 3, pp. 1710–1714. [Google Scholar]
- Muljadi, E.; Butterfield, C.P. Pitch-controlled variable-speed wind turbine generation. IEEE Trans. Ind. Appl. 2001, 37, 240–246. [Google Scholar] [CrossRef] [Green Version]
- Polinder, H.; Bang, D.; van Rooij, R.P.J.O.M.; McDonald, A.S.; Mueller, M.A. 10 MW Wind Turbine Direct-Drive Generator Design with Pitch or Active Speed Stall Control. In Proceedings of the 2007 IEEE International Electric Machines & Drives Conference, Antalya, Turkey, 3–5 May 2007; Volume 2, pp. 1390–1395. [Google Scholar]
- Bottasso, C.L.; Croce, A.; Gualdoni, F.; Montinari, P. Load mitigation for wind turbines by a passive aeroelastic device. J. Wind. Eng. Ind. Aerodyn. 2016, 148, 57–69. [Google Scholar] [CrossRef] [Green Version]
- Menezes, E.J.N.; Araújo, A.M.; da Silva, N.S.B. A review on wind turbine control and its associated methods. J. Clean. Prod. 2018, 174, 945–953. [Google Scholar] [CrossRef]
- Lubosny, Z.; Bialek, J.W. Supervisory control of a wind farm. IEEE Trans. Power Syst. 2007, 22, 985–994. [Google Scholar] [CrossRef]
- Thresher, R.; Schreck, S.; Robinson, M.; Veers, P. Wind Energy Status and Future Wind Engineering Challenges; Technical Report NREL/CP-500-43799; National Renewable Energy Lab: Jefferson County, CO, USA, 2008.
- Ponta, F.L.; Otero, A.D.; Lago, L.I.; Rajan, A. Effects of rotor deformation in wind-turbine performance: The Dynamic Rotor Deformation Blade Element Momentum model (DRD–BEM). Renew. Energy 2016, 92, 157–170. [Google Scholar] [CrossRef] [Green Version]
- Yu, W.; Hodges, D.H.; Volovoi, V.; Cesnik, C.E.S. On Timoshenko-like modeling of initially curved and twisted composite beams. Int. J. Sol. and Struct. 2002, 39, 5101–5121. [Google Scholar] [CrossRef]
- Hodges, D.H. Nonlinear Composite Beam Theory; AIAA: Reston, VA, USA, 2006. [Google Scholar]
- Otero, A.D.; Ponta, F.L. Structural Analysis of Wind-Turbine Blades by a Generalized Timoshenko Beam Model. J. Sol. Energy Eng. 2010, 132, 011015. [Google Scholar] [CrossRef]
- Menon, M.; Ponta, F. Dynamic Aeroelastic Behavior of Wind Turbine Rotors in Rapid Pitch-Control Actions. Renew. Energy 2017, 107, 327–339. [Google Scholar] [CrossRef] [Green Version]
- Otero, A.D.; Ponta, F.L. On the sources of cyclic loads in horizontal-axis wind turbines: The role of blade-section misalignment. Renew. Energy 2018, 117, 275–286. [Google Scholar] [CrossRef]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; Technical Report NREL/TP-500-38060; National Renewable Energy Laboratory: Jefferson County, CO, USA, 2009.
- Xudong, W.; Shen, W.Z.; Zhu, C. Shape optimization of wind turbine blades. Wind Energy 2009, 12, 781–803. [Google Scholar] [CrossRef]
- Jalal, S.; Ponta, F.; Baruah, A. Aeroelastic Response of Variable-Speed Stall-Controlled Wind Turbine Rotors. In ASME 13th International Conference on Energy Sustainability; American Society of Mechanical Engineers: New York, NY, USA, 2019. [Google Scholar]
- Jaimes, O.G. Design Concepts for Offshore Wind Turbines: A Technical and Economical Study on the Trade-Off between Stall and Pitch Controlled Systems. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2010. [Google Scholar]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jalal, S.; Ponta, F.; Baruah, A.; Rajan, A. Dynamic Aeroelastic Response of Stall-Controlled Wind Turbine Rotors in Turbulent Wind Conditions. Appl. Sci. 2021, 11, 6886. https://doi.org/10.3390/app11156886
Jalal S, Ponta F, Baruah A, Rajan A. Dynamic Aeroelastic Response of Stall-Controlled Wind Turbine Rotors in Turbulent Wind Conditions. Applied Sciences. 2021; 11(15):6886. https://doi.org/10.3390/app11156886
Chicago/Turabian StyleJalal, Sara, Fernando Ponta, Apurva Baruah, and Anurag Rajan. 2021. "Dynamic Aeroelastic Response of Stall-Controlled Wind Turbine Rotors in Turbulent Wind Conditions" Applied Sciences 11, no. 15: 6886. https://doi.org/10.3390/app11156886
APA StyleJalal, S., Ponta, F., Baruah, A., & Rajan, A. (2021). Dynamic Aeroelastic Response of Stall-Controlled Wind Turbine Rotors in Turbulent Wind Conditions. Applied Sciences, 11(15), 6886. https://doi.org/10.3390/app11156886