
Design and Implementation of an Autonomous Charging Station for Agricultural Electrical Vehicles


Abstract
:1. Introduction
- Holistic charging mechanism that is independent of the manufacturer of the vehicles.
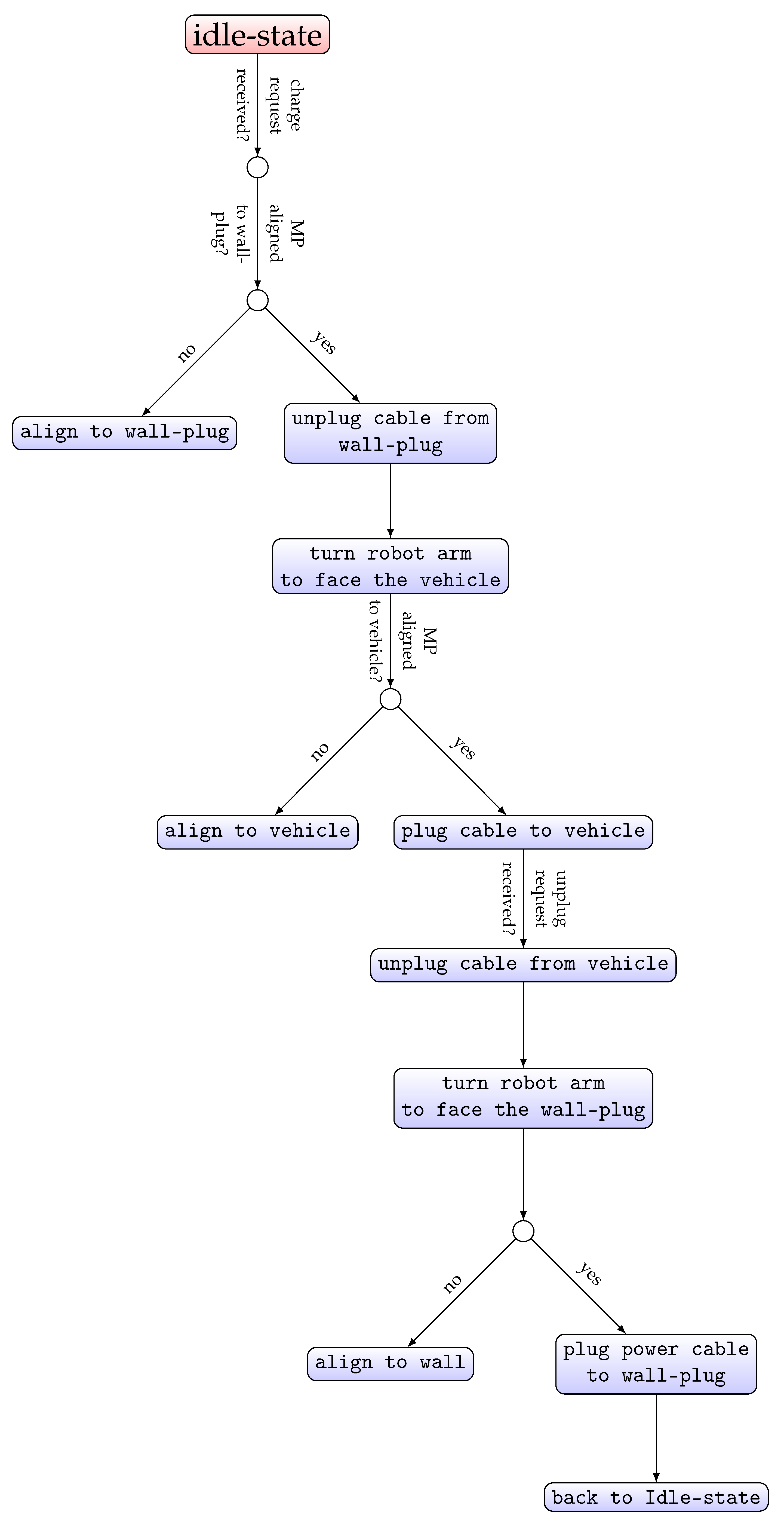
- Decision-tree-based scheme for controlling a combination of a robotic arm and an omnidirectional mobile platform.
- To the best knowledge of the author, this is the first proof-of-concept of a dedicated autonomous charging solution for agricultural electrical vehicles.
2. Materials and Methods
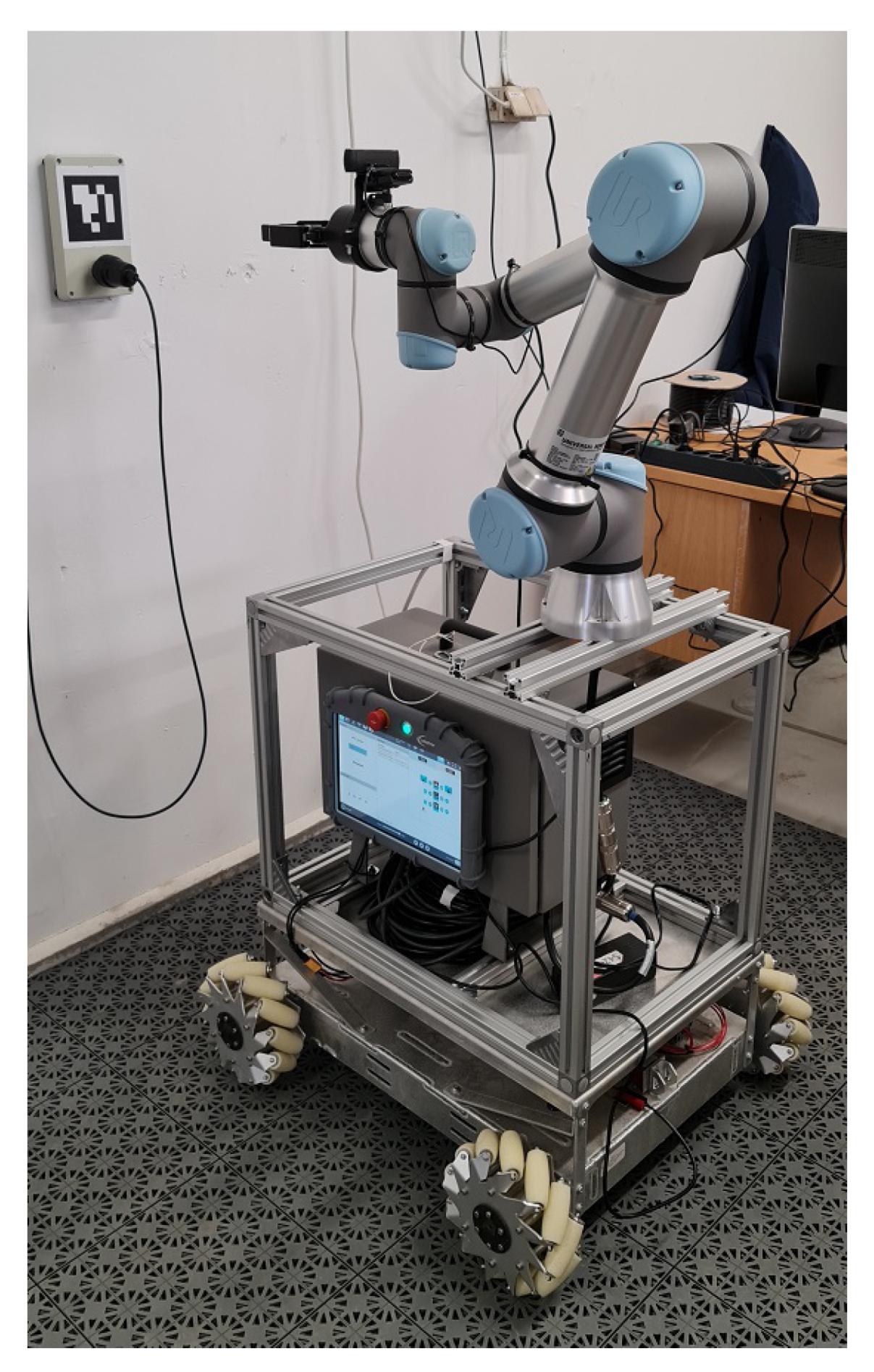
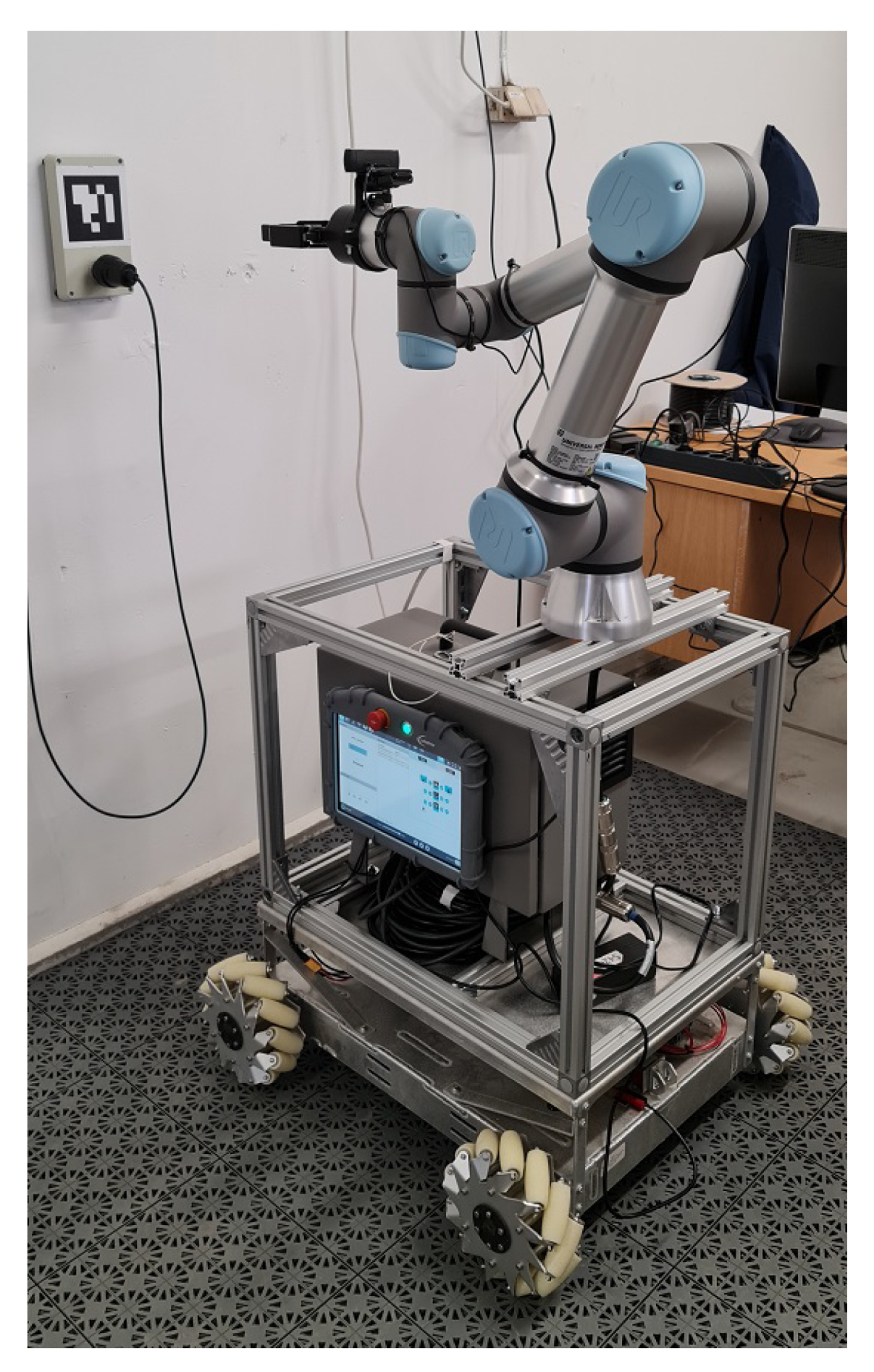
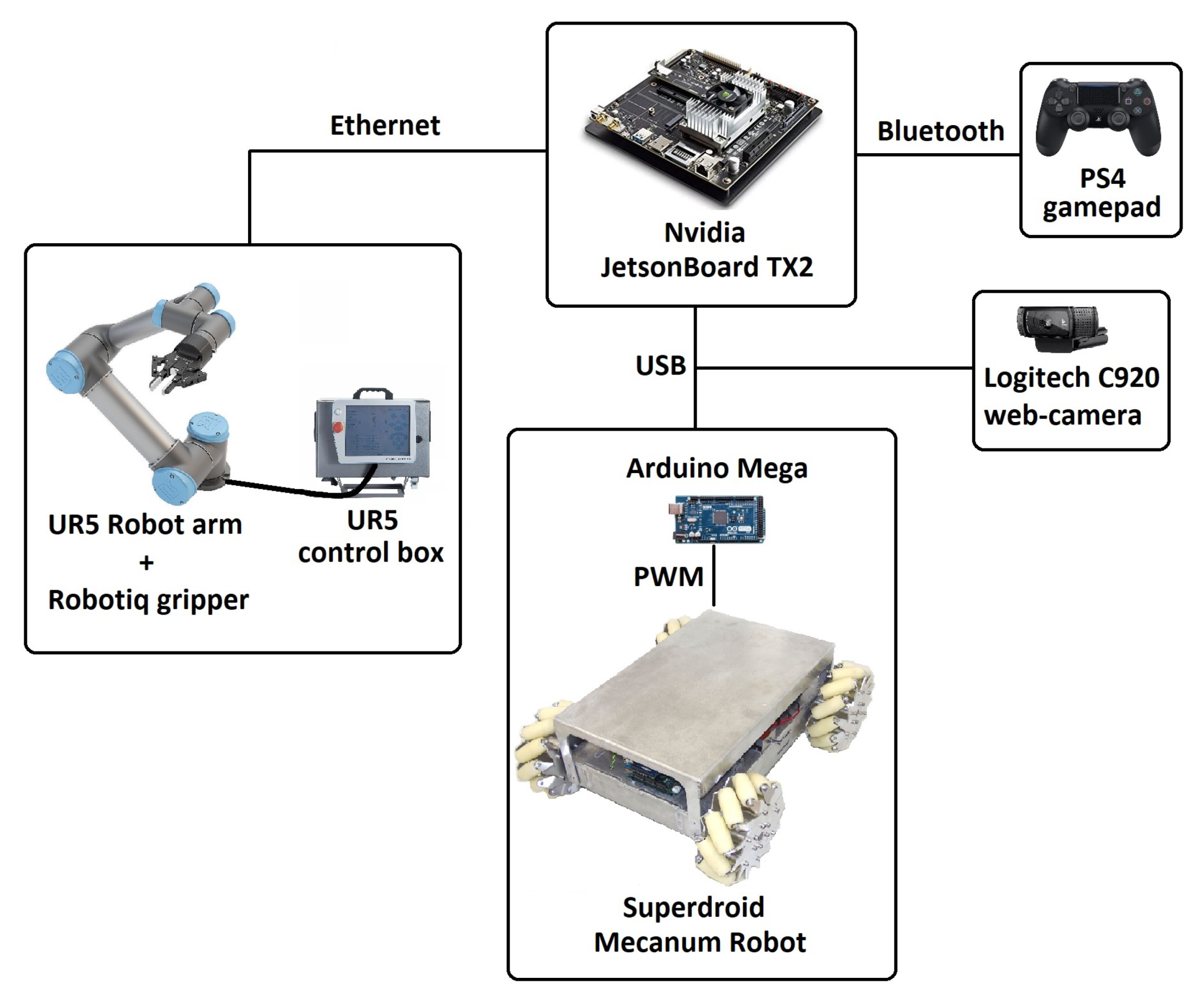
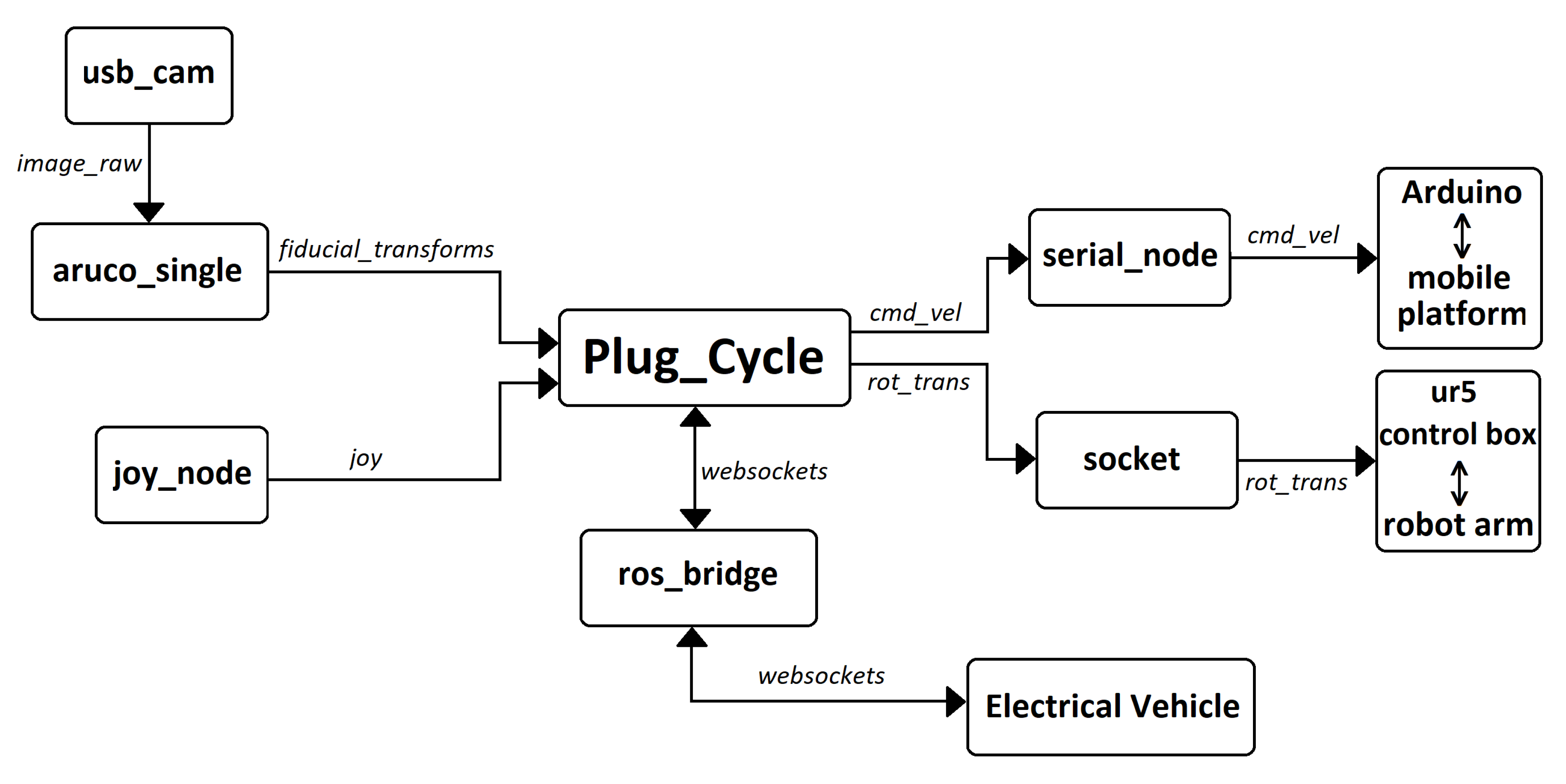
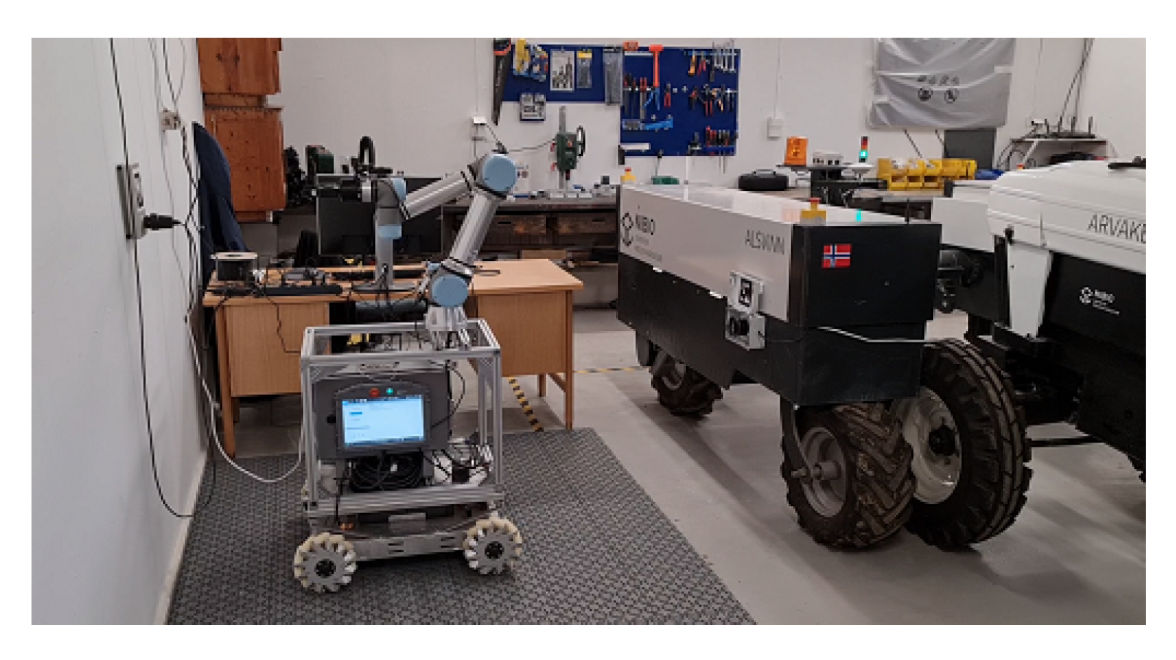
2.1. Hardware and Software Description
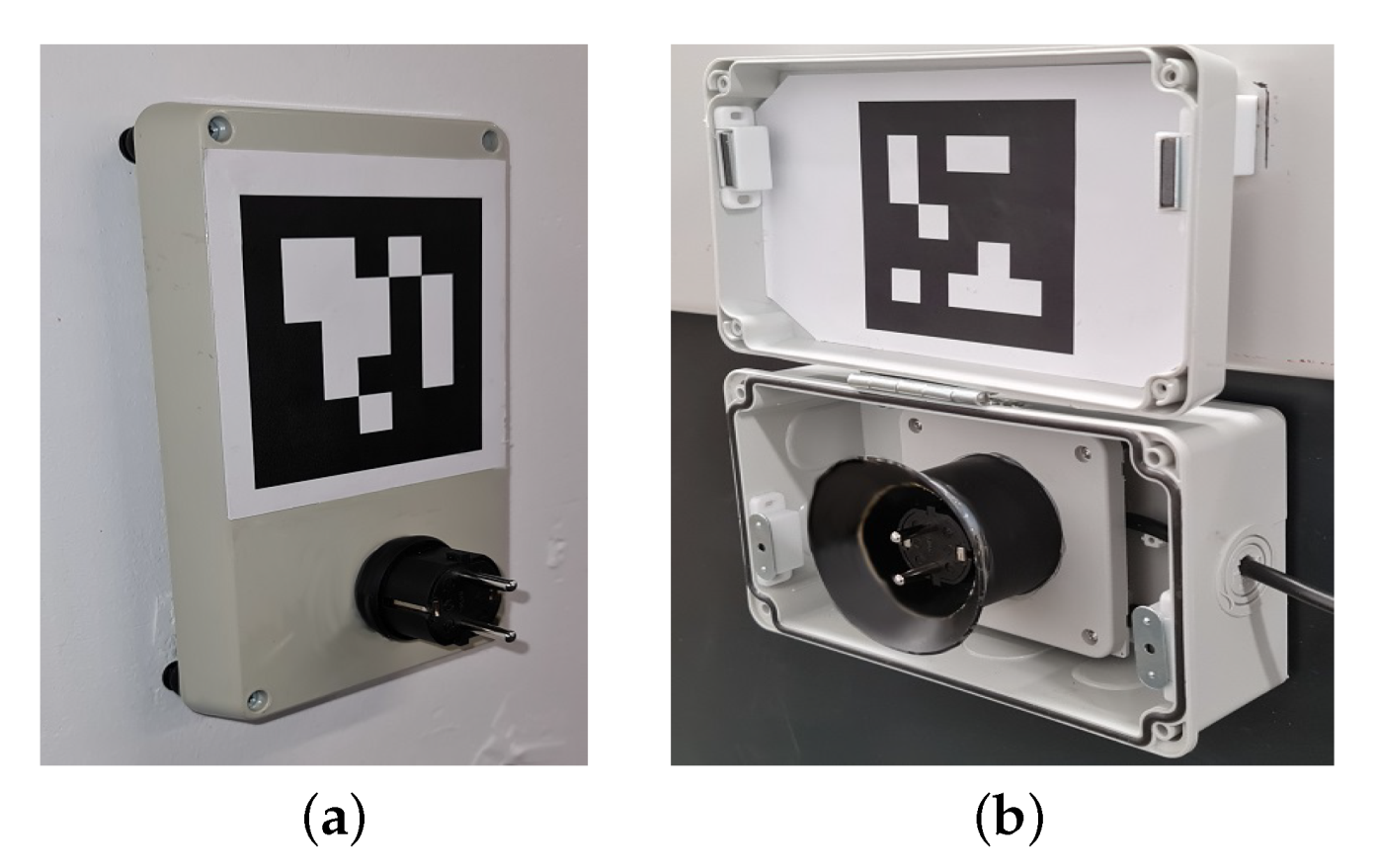
2.2. The Plugs
2.3. Decision-Tree Based Architecture
2.4. Controller’s Description
2.4.1. Mobile Platform Controller
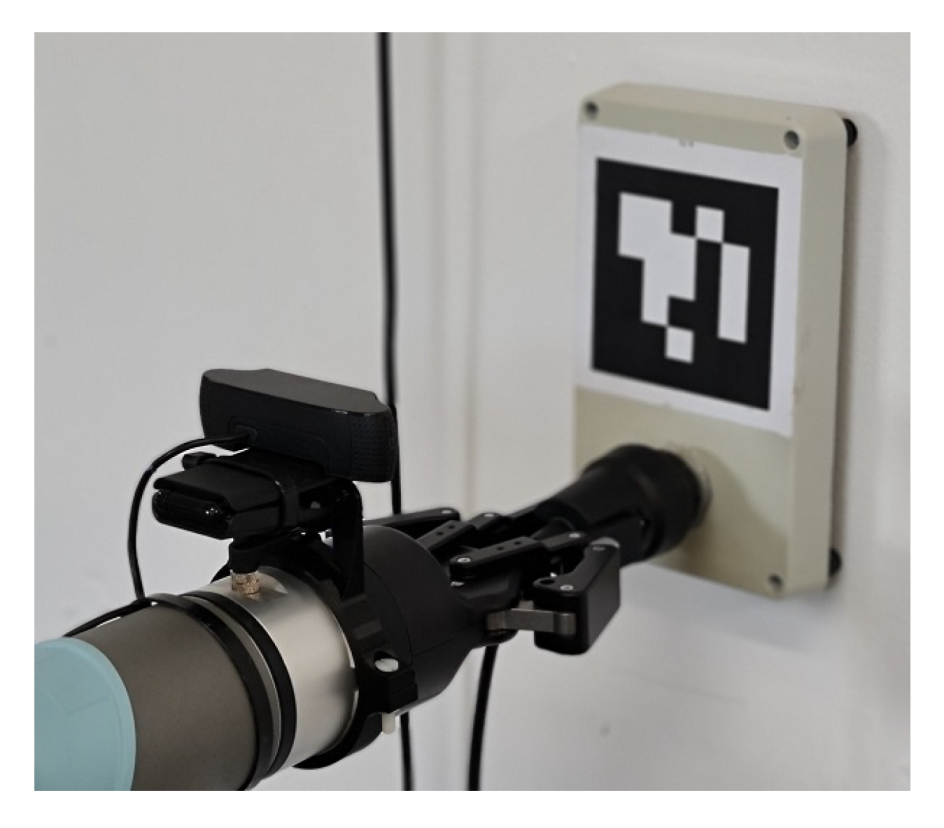
2.4.2. Robot Arm Controller
| Algorithm 1: Plug control sequence. |
 |
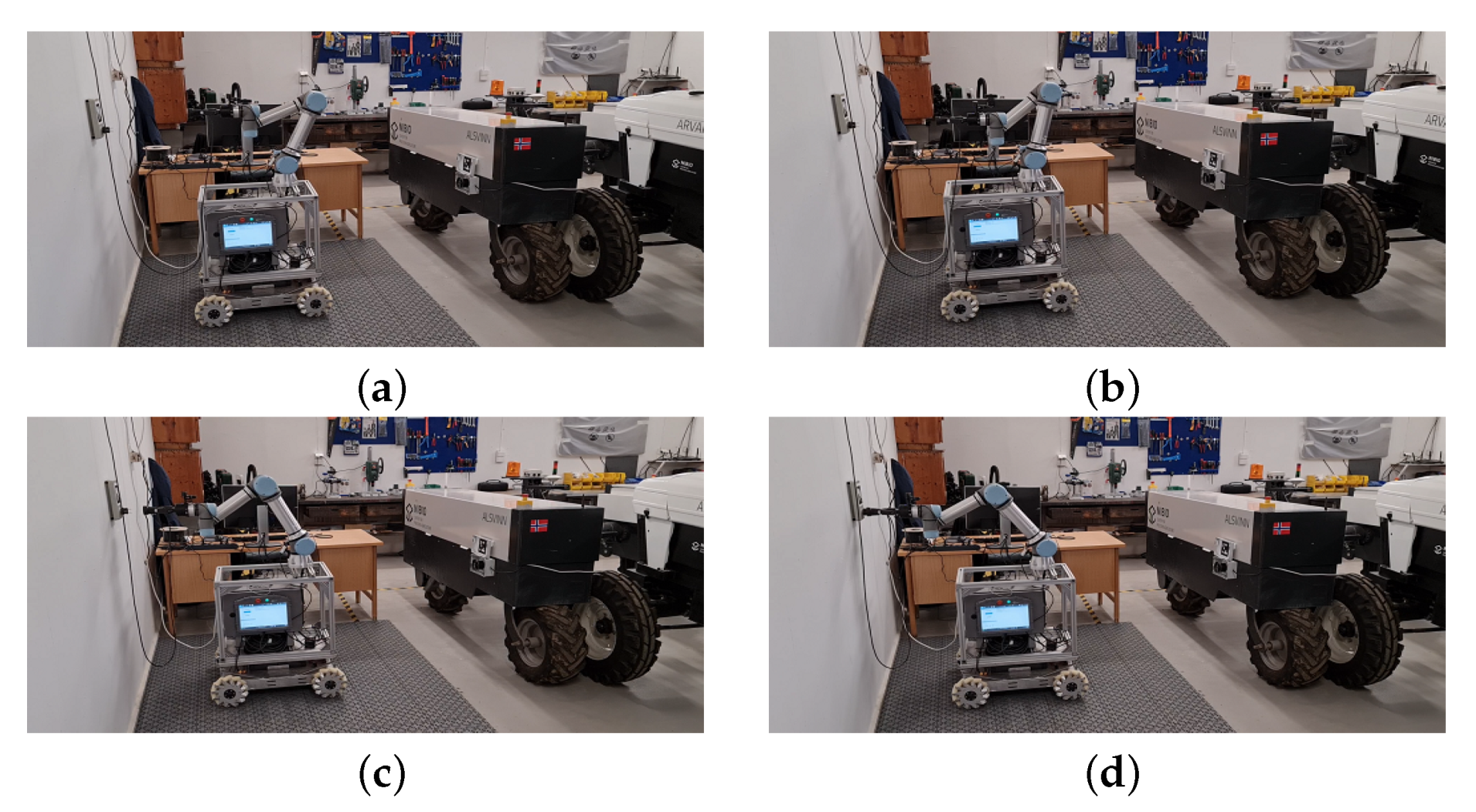
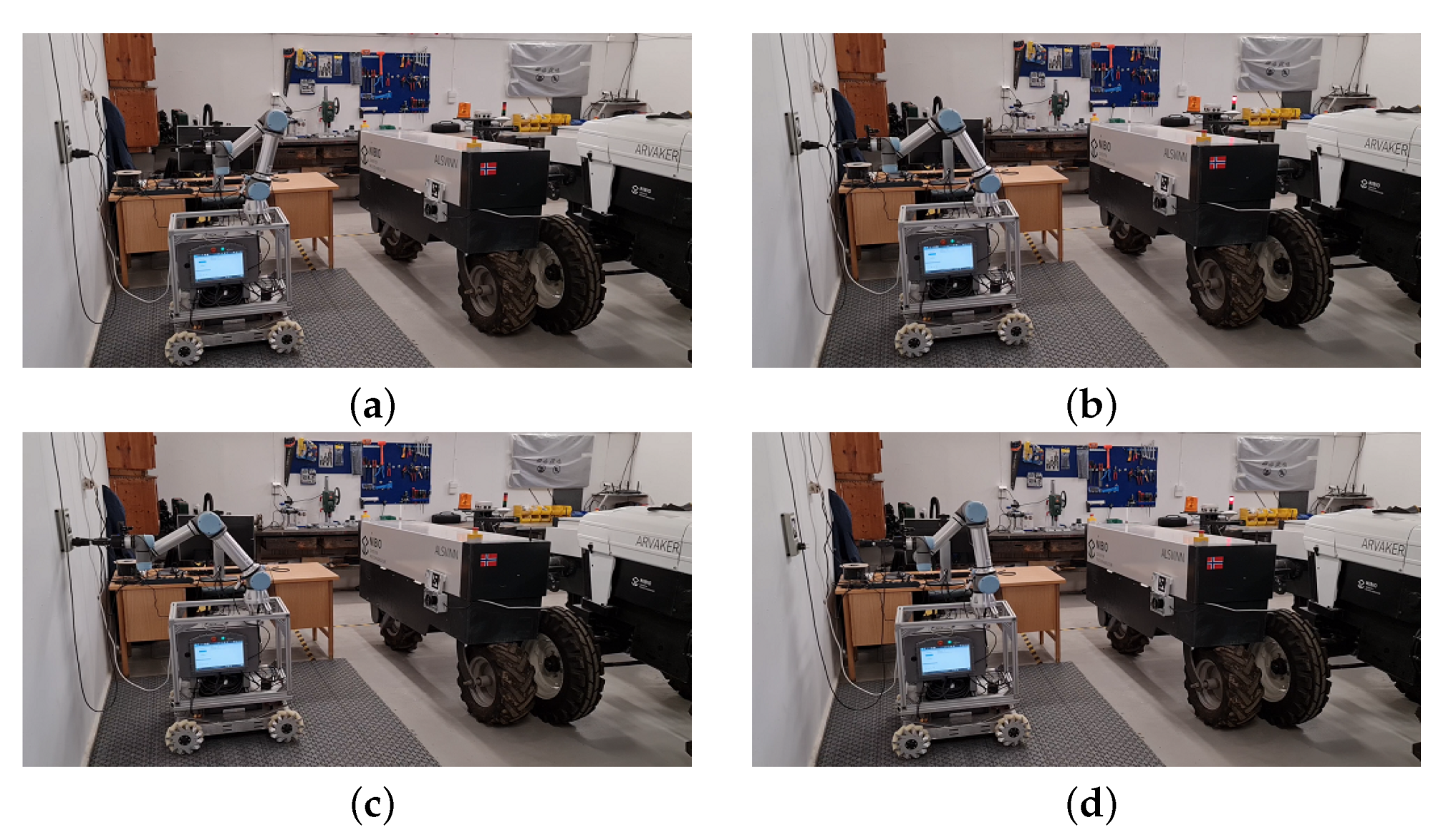
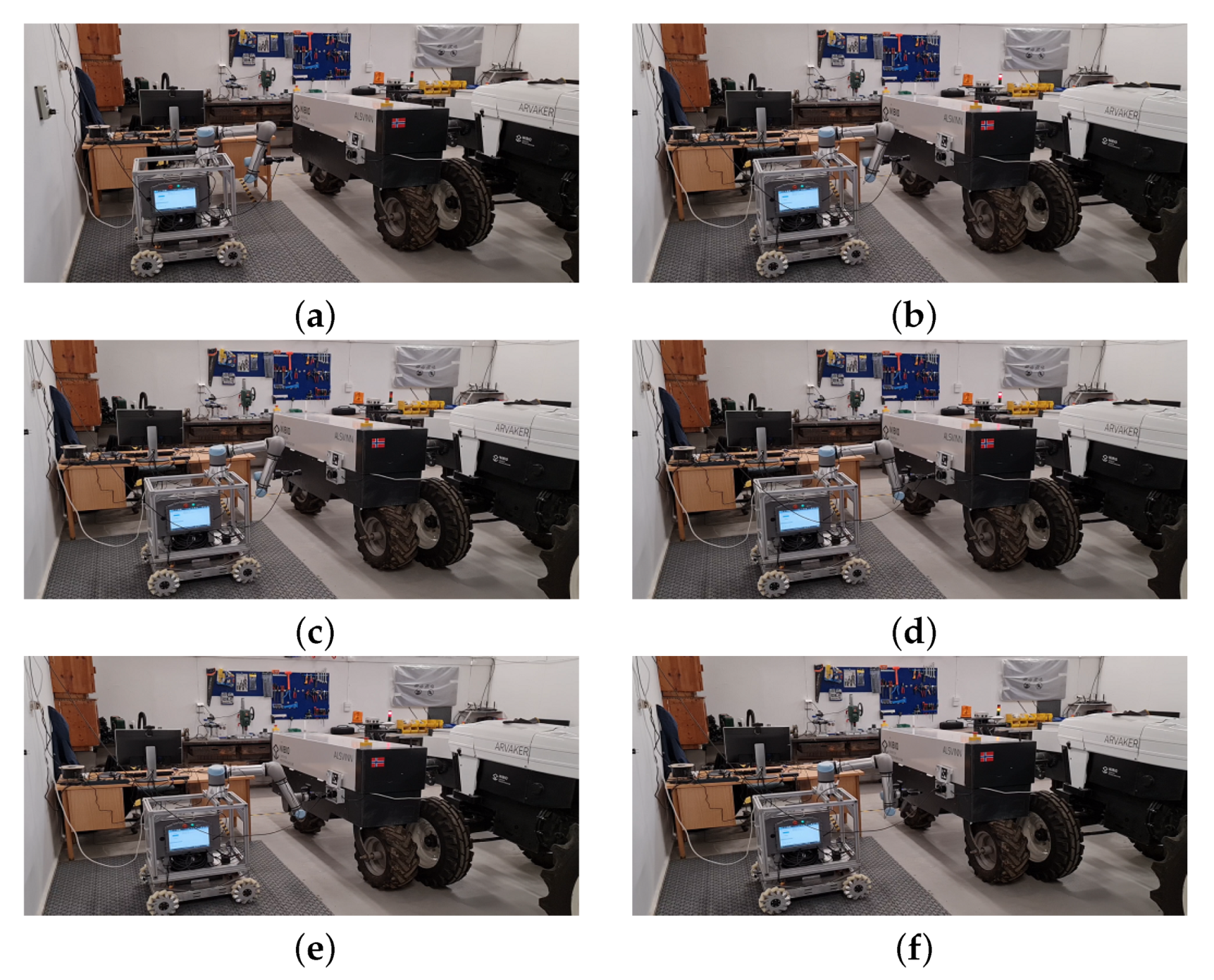
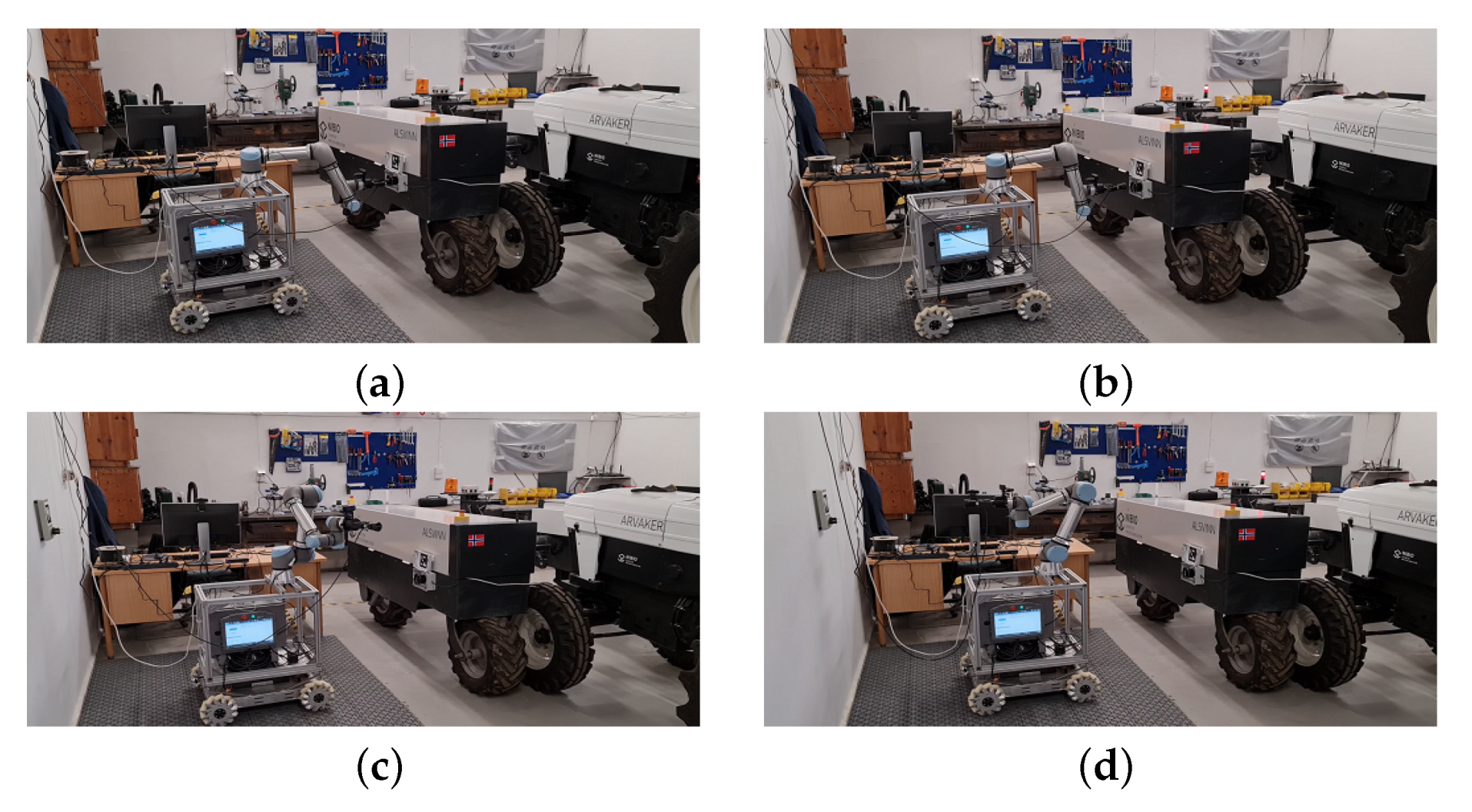
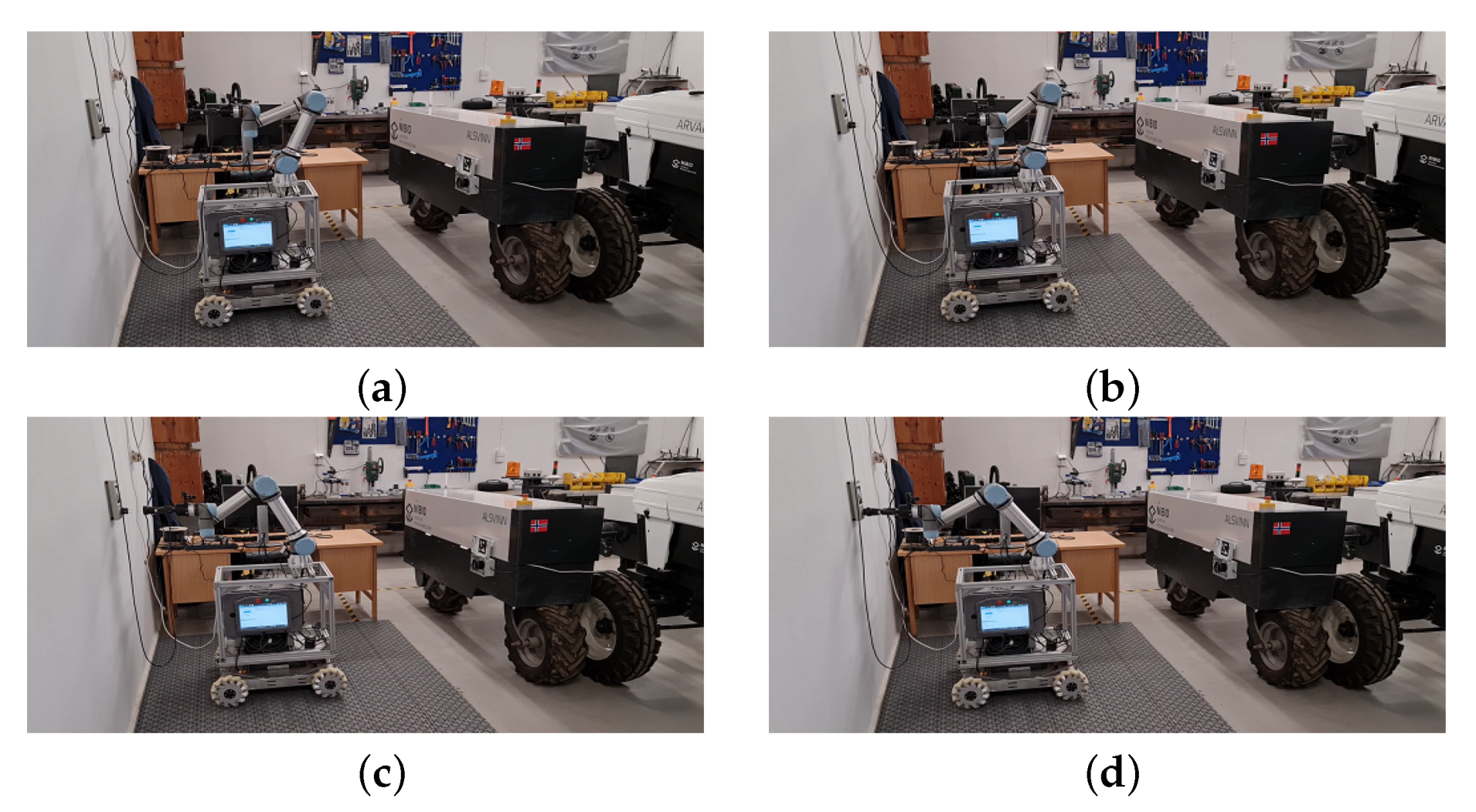
3. Results
4. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- John Deere Future of Farming. Available online: https://www.deere.co.uk/en/agriculture/future-of-farming/ (accessed on 1 July 2021).
- Fendt e100 Vario: The Battery-Powered Tractor. Available online: https://www.fendt.com/int/fendt-e100-vario (accessed on 1 July 2021).
- Hjelkrem, A.G.R.; Fagerström, J.; Kvalbein, L.; Bakken, A.K. Potential for Replacing Fossil Energy by Local PV Energy for Field and Transport Work in Norwegian Farming; NIBIO Rapport; NIBIO: Norway, OSlo, 2020. [Google Scholar]
- Emmi, L.; Gonzalez-de Soto, M.; Pajares, G.; Gonzalez-de Santos, P. New trends in robotics for agriculture: Integration and assessment of a real fleet of robots. Sci. World J. 2014, 2014, 404059. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cariou, C.; Laneurit, J.; Roux, J.C.; Lenain, R. Multi-robots trajectory planning for farm field coverage. In Proceedings of the 2020 16th International Conference on Control, Automation, Robotics and Vision (ICARCV), Shenzhen, China, 13–15 December 2020; pp. 351–356. [Google Scholar]
- Moreda, G.; Muñoz-García, M.; Barreiro, P. High voltage electrification of tractor and agricultural machinery—A review. Energy Convers. Manag. 2016, 115, 117–131. [Google Scholar] [CrossRef]
- Aghajanzadeh, A.; Therkelsen, P. Agricultural demand response for decarbonizing the electricity grid. J. Clean. Prod. 2019, 220, 827–835. [Google Scholar] [CrossRef] [Green Version]
- Solectrac Climate-Smart Electric Tractors. Available online: https://solectrac.com/ (accessed on 1 July 2021).
- Dino Autonomous Vegetable Weeding Robot. Available online: https://www.naio-technologies.com/en/agricultural-equipment/large-scale-vegetable-weeding-robot/ (accessed on 1 July 2021).
- Harik, E.H.C.; Guérin, F.; Guinand, F.; Brethé, J.F.; Pelvillain, H. UAV-UGV cooperation for objects transportation in an industrial area. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 547–552. [Google Scholar]
- Calicioglu, O.; Flammini, A.; Bracco, S.; Bellù, L.; Sims, R. The future challenges of food and agriculture: An integrated analysis of trends and solutions. Sustainability 2019, 11, 222. [Google Scholar] [CrossRef] [Green Version]
- Romanov, A.M.; Tararin, A.A. An Automatic Docking System for Wheeled Mobile Robots. In Proceedings of the 2021 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (ElConRus), St. Petersburg, Russia, 2021; pp. 1040–1045. [Google Scholar]
- Martinez-Gomez, J.; Fernandez-Caballero, A.; Garcia-Varea, I.; Rodriguez, L.; Romero-Gonzalez, C. A taxonomy of vision systems for ground mobile robots. Int. J. Adv. Robot. Syst. 2014, 11, 111. [Google Scholar] [CrossRef] [Green Version]
- Rao, M.S.; Shivakumar, M. IR Based Auto-Recharging System for Autonomous Mobile Robot. J. Robot. Control JRC 2021, 2, 244–251. [Google Scholar]
- Zhang, X.; Li, X.; Zhang, X. Automatic Docking and Charging of Mobile Robot Based on Laser Measurement. In Proceedings of the 2021 IEEE 5th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 March 2021; Volume 5, pp. 2229–2234. [Google Scholar]
- Kim, M.; Chong, N.Y. RFID-based mobile robot guidance to a stationary target. Mechatronics 2007, 17, 217–229. [Google Scholar] [CrossRef]
- Volkswagen Electrifying World Premiere: Volkswagen Offers First Glimpse of Mobile Charging Station. Available online: https://www.volkswagen-newsroom.com/en/press-releases/electrifying-world-premiere-volkswagen-offers-first-glimpse-of-mobile-charging-station-4544 (accessed on 1 July 2021).
- EVAR Autonomous Charging Robot by Samsung. Available online: https://www.evar.co.kr/eng/ (accessed on 1 July 2021).
- CARL Mobile Charging Robot. Available online: https://insideevs.com/news/410418/aiways-mobile-charging-robot-carl-patents/ (accessed on 1 July 2021).
- Type F Schuko Plug. Available online: https://www.worldstandards.eu/electricity/plugs-and-sockets/f/ (accessed on 1 July 2021).
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 17 May 2009; Volume 3, p. 5. [Google Scholar]
- Chitta, S.; Sucan, I.; Cousins, S. Moveit![ros topics]. IEEE Robot. Autom. Mag. 2012, 19, 18–19. [Google Scholar] [CrossRef]
- Usb Cam ROS Package. Available online: http://wiki.ros.org/usb_cam (accessed on 1 July 2021).
- Fiducial Markers ROS Package. Available online: http://wiki.ros.org/aruco_detect (accessed on 1 July 2021).
- Rosserial Python ROS Package. Available online: http://wiki.ros.org/rosserial_python (accessed on 1 July 2021).
- Joystick ROS Package. Available online: http://wiki.ros.org/joy (accessed on 1 July 2021).
- Socket Low-Level Networking Interface. Available online: https://docs.python.org/3/library/socket.html (accessed on 1 July 2021).
- Ur5 Client Interfaces. Available online: https://www.universal-robots.com/articles/ur/interface-communication/overview-of-client-interfaces/ (accessed on 1 July 2021).
- Python ROS Bridge Library. Available online: https://roslibpy.readthedocs.io/ (accessed on 1 July 2021).
- Rosbridge Suite ROS Package. Available online: http://wiki.ros.org/rosbridge_suite/ (accessed on 1 July 2021).
- Romero-Ramirez, F.J.; Muñoz-Salinas, R.; Medina-Carnicer, R. Speeded up detection of squared fiducial markers. Image Vis. Comput. 2018, 76, 38–47. [Google Scholar] [CrossRef]
- Freund, Y.; Mason, L. The alternating decision tree learning algorithm. In Proceedings of the Sixteenth International Conference on Machine Learning, Bled, Slovenia, 27–30 June 1999; Volume 99, pp. 124–133. [Google Scholar]
- Siegwart, R.; Nourbakhsh, I.R.; Scaramuzza, D. Introduction to Autonomous Mobile Robots; MIT Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Muir, P.F.; Neuman, C.P. Kinematic modeling of wheeled mobile robots. J. Robot. Syst. 1987, 4, 281–340. [Google Scholar] [CrossRef]
- Garrido-Jurado, S.; Muñoz-Salinas, R.; Madrid-Cuevas, F.J.; Marín-Jiménez, M.J. Automatic generation and detection of highly reliable fiducial markers under occlusion. Pattern Recognit. 2014, 47, 2280–2292. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Significance | Values |
|---|---|---|
| positive linear gain | 0.5 | |
| positive angular gain | 0.15 | |
| distance to the AEV | 0.5 m | |
| distance to the wall-plug | 0.4 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Harik, E.H.C. Design and Implementation of an Autonomous Charging Station for Agricultural Electrical Vehicles. Appl. Sci. 2021, 11, 6168. https://doi.org/10.3390/app11136168
Harik EHC. Design and Implementation of an Autonomous Charging Station for Agricultural Electrical Vehicles. Applied Sciences. 2021; 11(13):6168. https://doi.org/10.3390/app11136168
Chicago/Turabian StyleHarik, El Houssein Chouaib. 2021. "Design and Implementation of an Autonomous Charging Station for Agricultural Electrical Vehicles" Applied Sciences 11, no. 13: 6168. https://doi.org/10.3390/app11136168
APA StyleHarik, E. H. C. (2021). Design and Implementation of an Autonomous Charging Station for Agricultural Electrical Vehicles. Applied Sciences, 11(13), 6168. https://doi.org/10.3390/app11136168