
Compliant Detachment of Wall-Climbing Robot Unaffected by Adhesion State




Abstract
:1. Introduction
2. Strategy of Compliant Detachment
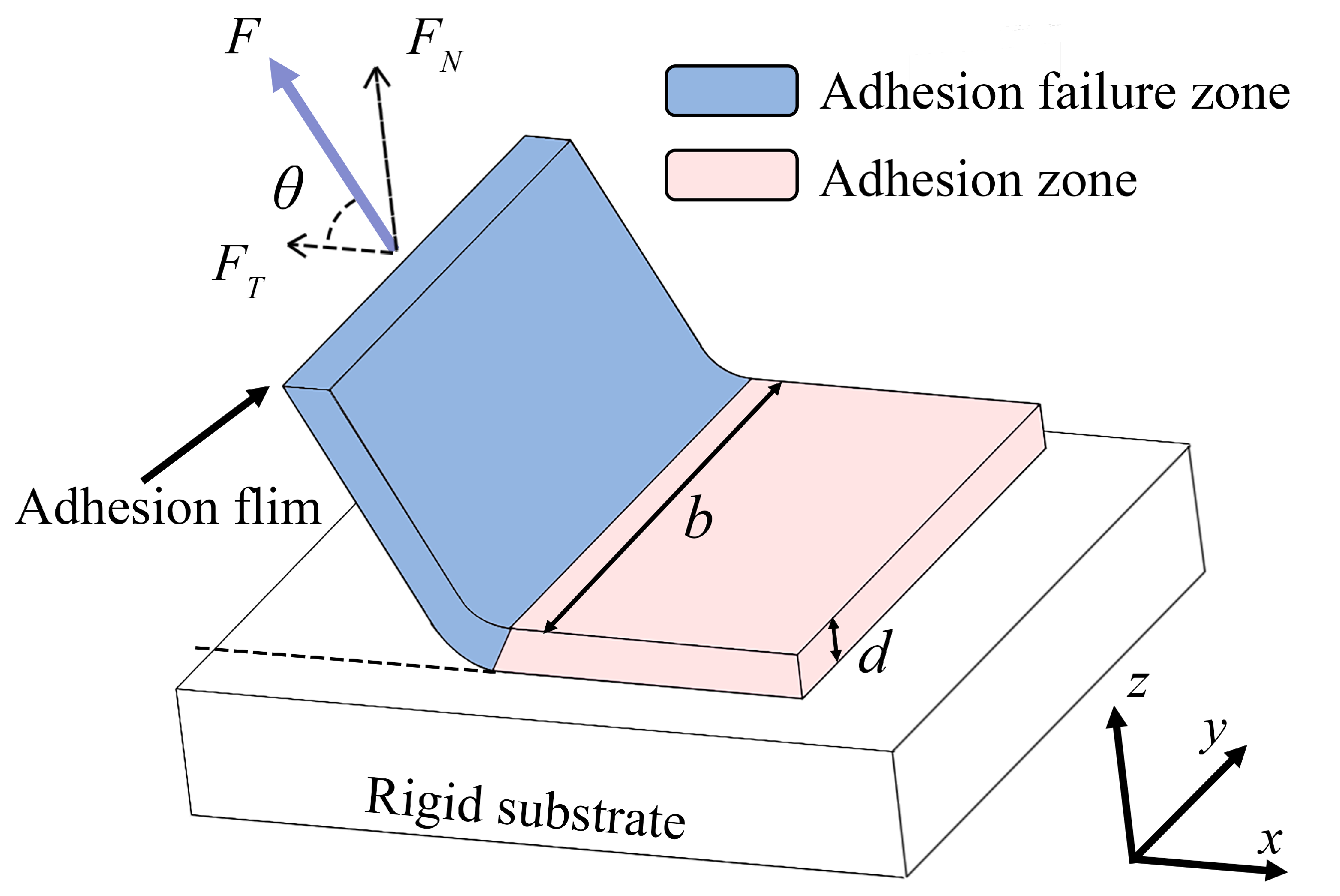
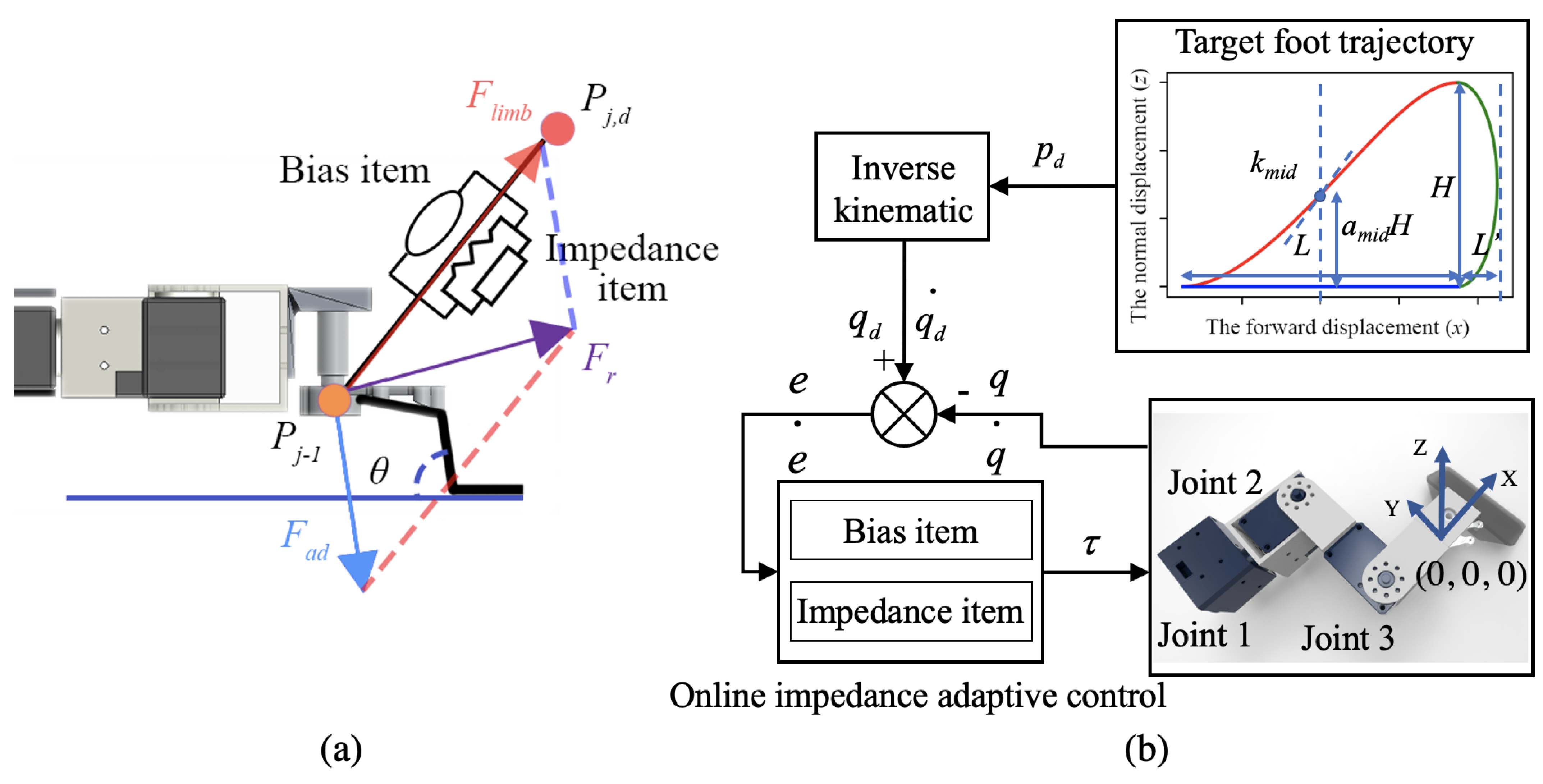
2.1. Mechanism of Detachment Force Regulation
2.2. Online Impedance Adaptation Controller
3. Robot System
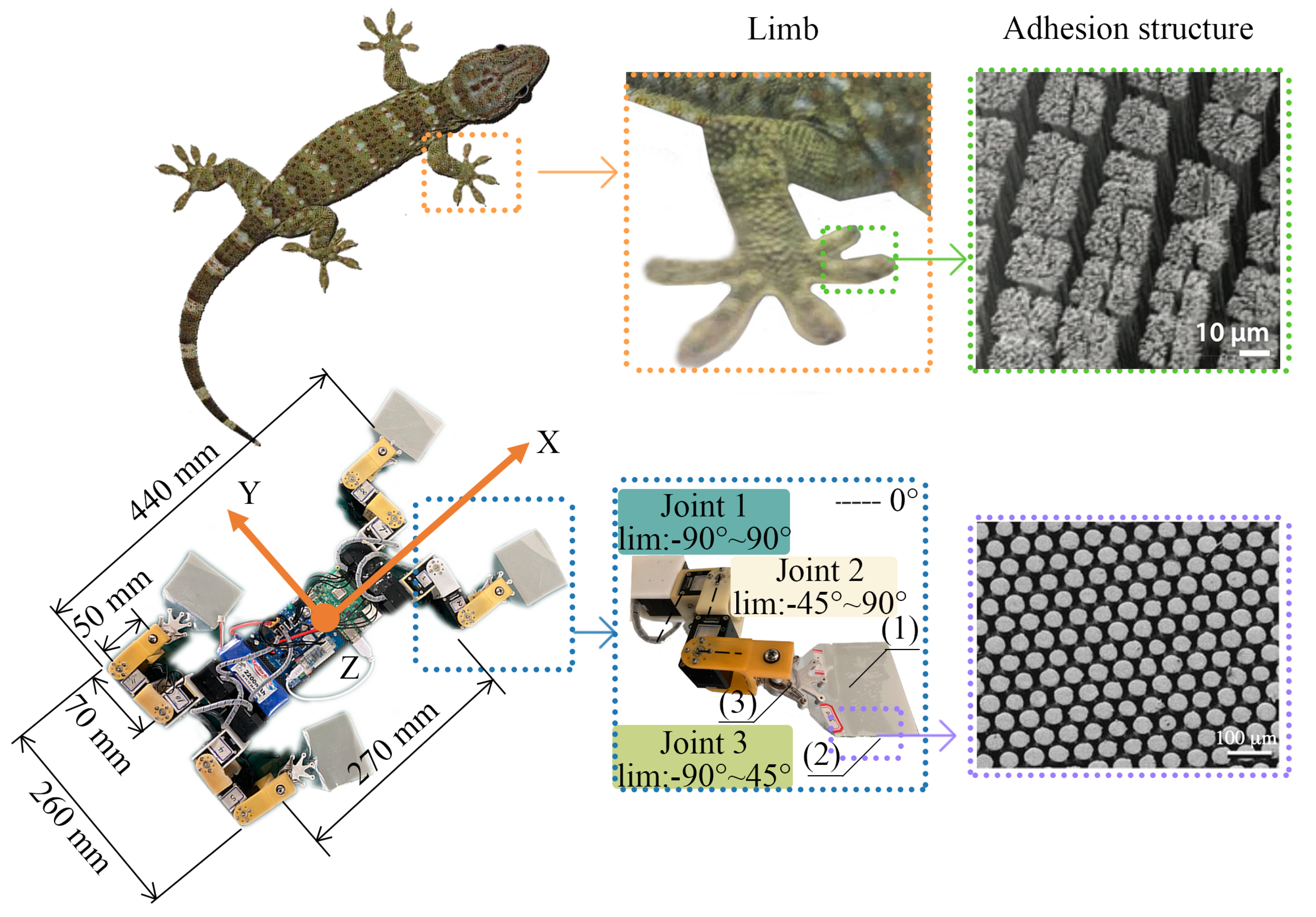
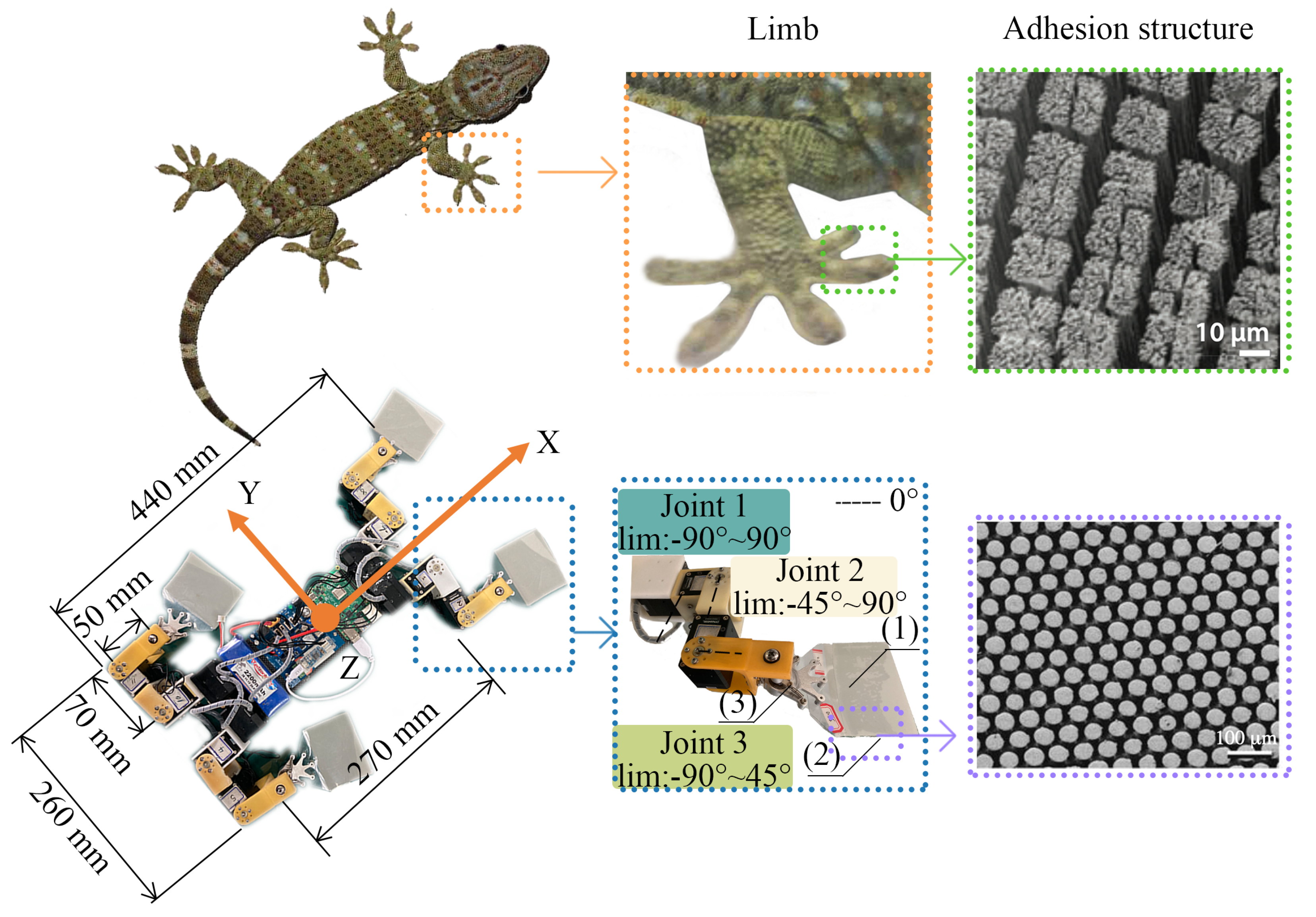
3.1. Mechanical Structure of Wall-Climbing Robot
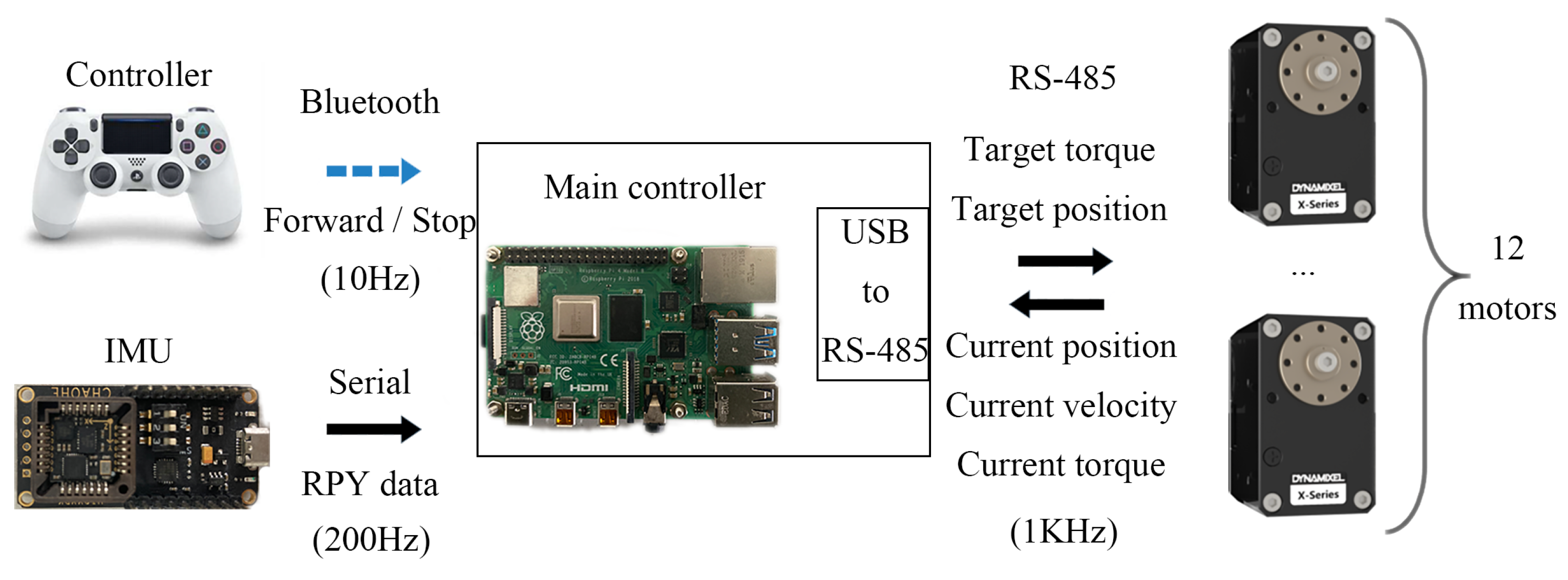
3.2. Control System Setup of Wall-Climbing Robot
4. Experiments and Results
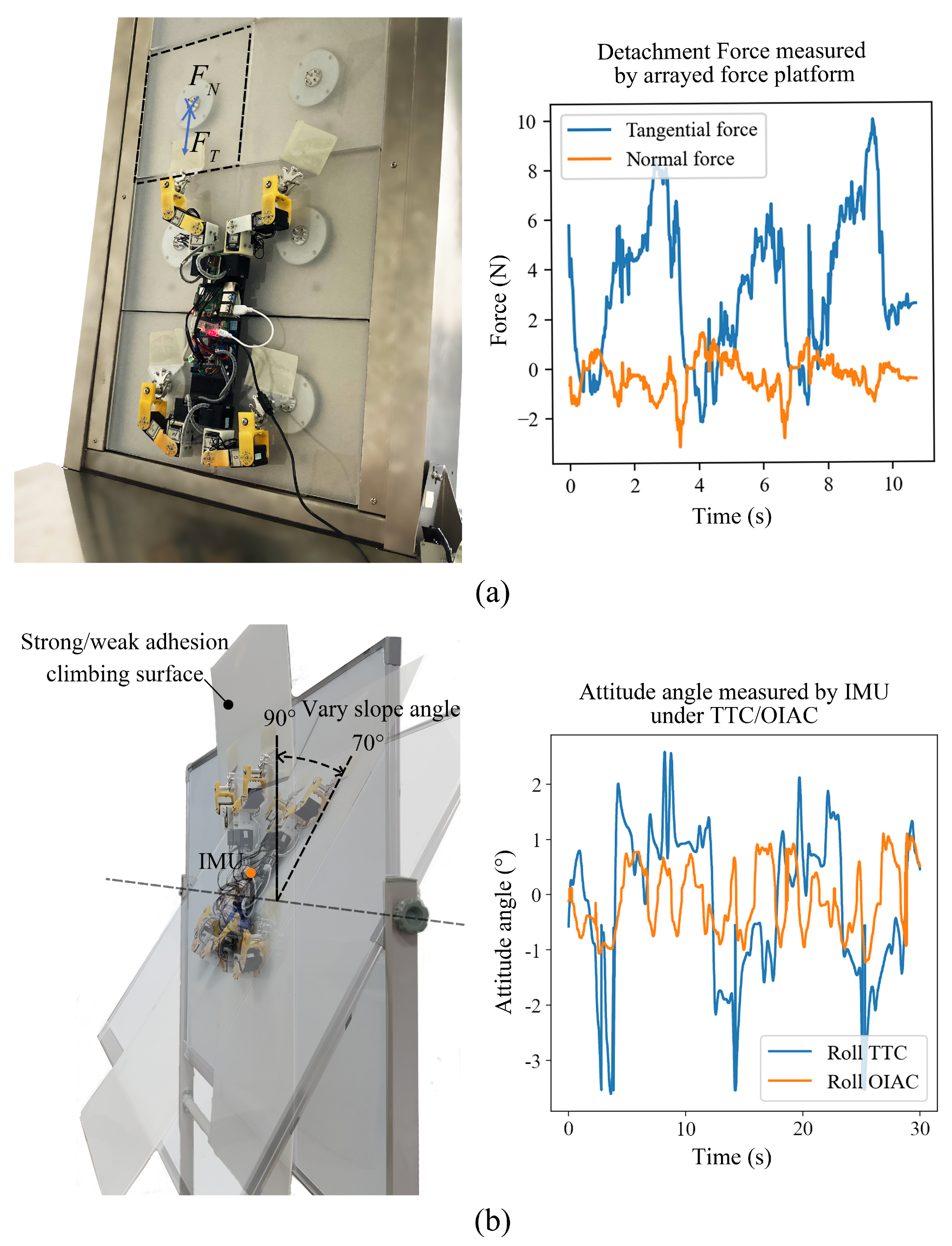
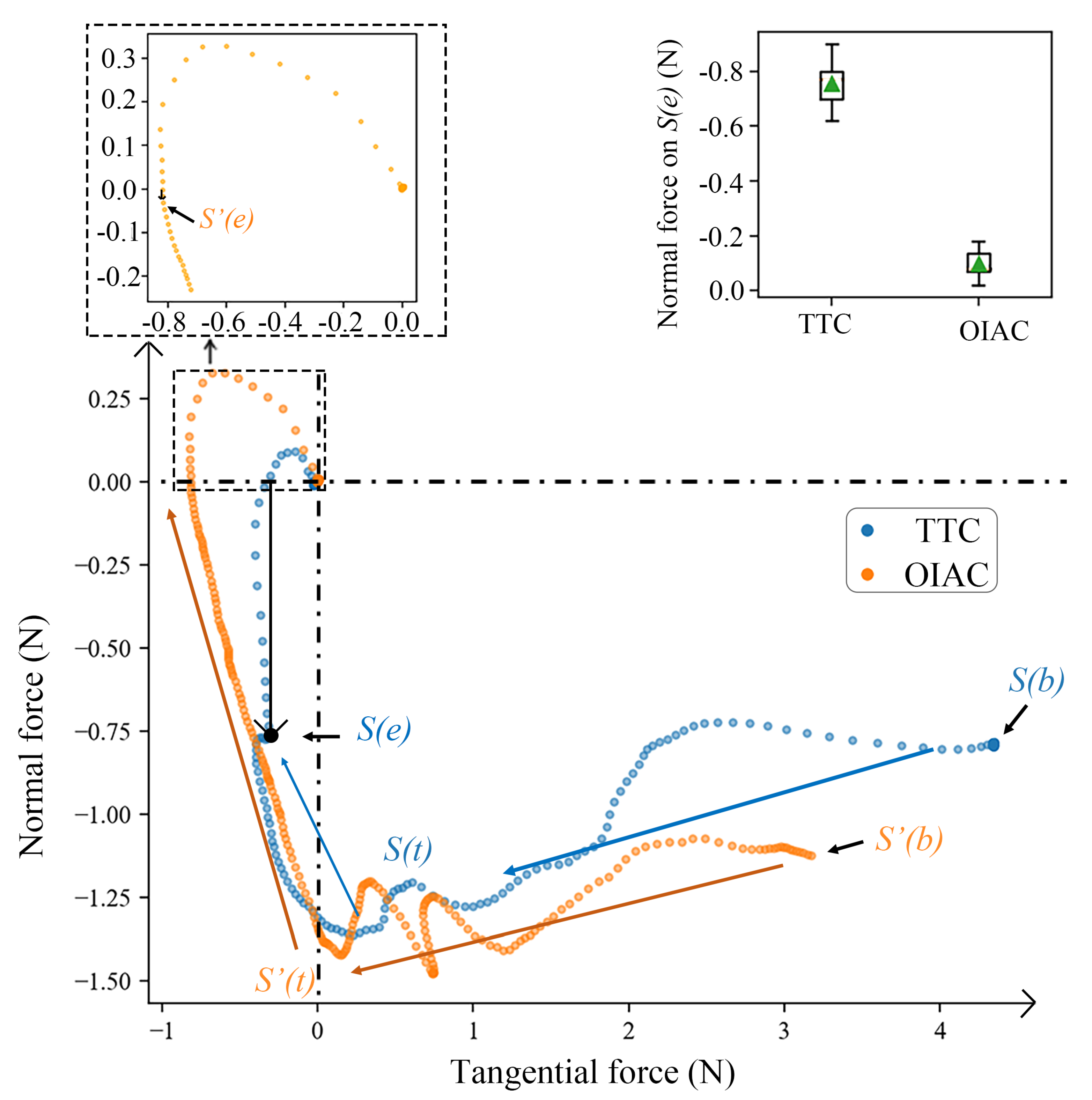
4.1. Detachment Force Trace during Climbing
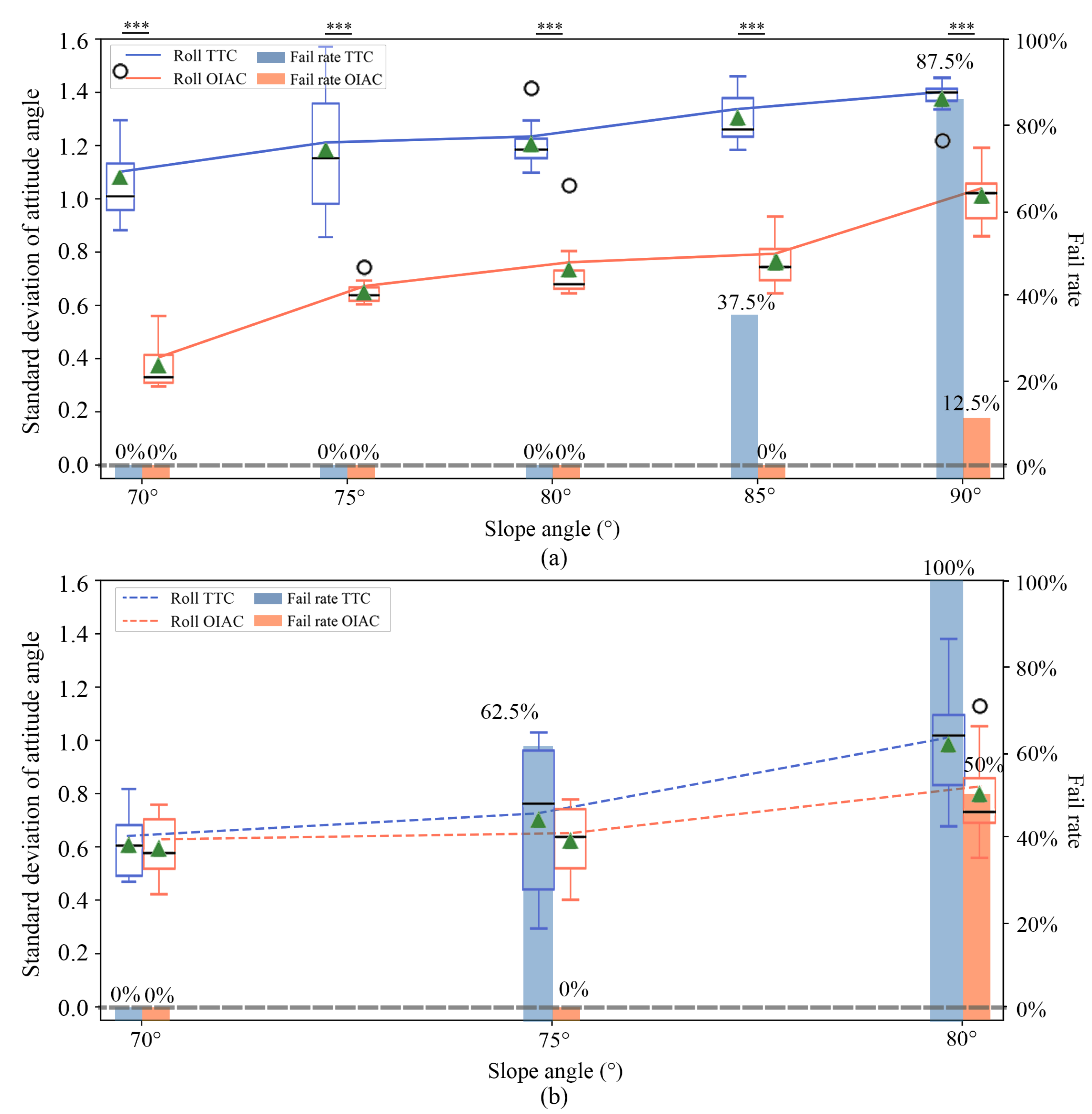
4.2. Robot Stability on Various Surfaces with Various Slope Angles
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

Appendix B
References
- Ge, D.; Tang, Y.; Ma, S.; Matsuno, T.; Ren, C. A pressing attachment approach for a wall-climbing robot utilizing passive suction cups. Robotics 2020, 9, 26. [Google Scholar] [CrossRef] [Green Version]
- Eto, H.; Asada, H.H. Development of a Wheeled Wall-Climbing Robot with a Shape-Adaptive Magnetic Adhesion Mechanism. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 9329–9335. [Google Scholar]
- Seriani, S.; Scalera, L.; Caruso, M.; Gasparetto, A.; Gallina, P. Upside-Down Robots: Modeling and Experimental Validation of Magnetic-Adhesion Mobile Systems. Robotics 2019, 8, 41. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Xu, L.; Chen, S.; Xu, H.; Cheng, G.; Xu, J. Development of a Bio-inspired Wall-Climbing Robot Composed of Spine Wheels, Adhesive Belts and Eddy Suction Cup. Robotica 2021, 39, 3–22. [Google Scholar] [CrossRef]
- Gorb, S.; Varenberg, M.; Peressadko, A.; Tuma, J. Biomimetic mushroom-shaped fibrillar adhesive microstructure. J. R. Soc. Interface 2007, 4, 271. [Google Scholar] [CrossRef] [Green Version]
- Parness, A.; Soto, D.; Esparza, N.; Gravish, N.; Wilkinson, M.; Autumn, K.; Cutkosky, M. A microfabricated wedge-shaped adhesive array displaying gecko-like dynamic adhesion, directionality and long lifetime. J. R. Soc. Interface 2009, 6, 271. [Google Scholar] [CrossRef] [Green Version]
- Hawkes, E.W.; Eason, E.V.; Asbeck, A.T.; Cutkosky, M.R. The Gecko’s Toe: Scaling Directional Adhesives for Climbing Applications. IEEE/ASME Trans. Mechatron. 2013, 18, 518–526. [Google Scholar] [CrossRef]
- Unver, O.; Sitti, M. Tankbot: A miniature, peeling based climber on rough and smooth surfaces. In Proceedings of the IEEE International Conference on Robotics & Automation, Kobe, Japan, 12–17 May 2009. [Google Scholar]
- Daltorio, K.A.; Wei, T.E.; Horchler, A.D.; Southard, L.; Wile, G.D.; Quinn, R.D.; Gorb, S.N.; Ritzmann, R.E. Mini-Whegs TM Climbs Steep Surfaces Using Insect-inspired Attachment Mechanisms. Int. J. Robot. Res. 2009, 28, 285–302. [Google Scholar] [CrossRef]
- Murphy, M.P.; Kute, C.; Mengüç, Y.; Sitti, M. Waalbot II: Adhesion Recovery and Improved Performance of a Climbing Robot using Fibrillar Adhesives. Int. J. Robot. Res. 2011, 30, 118–133. [Google Scholar] [CrossRef]
- Spenko, M.J.; Haynes, G.C.; Saunders, J.A.; Cutkosky, M.R.; Rizzi, A.A.; Full, R.J.; Koditschek, D.E. Biologically inspired climbing with a hexapedal robot. J. Field Robot. 2008, 25, 223–242. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.; Spenko, M.; Trujillo, S.; Heyneman, B.; Santos, D.; Cutkosky, M.R. Smooth Vertical Surface Climbing With Directional Adhesion. IEEE Trans. Robot. 2008, 24, 65–74. [Google Scholar]
- Hawkes, E.W.; Ulmen, J.; Esparza, N.; Cutkosky, M.R. Scaling walls: Applying dry adhesives to the real world. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 5100–5106. [Google Scholar]
- Birkmeyer, P.; Gillies, A.G.; Fearing, R.S. Dynamic climbing of near-vertical smooth surfaces. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 286–292. [Google Scholar]
- Liu, Y.; Kim, H.; Seo, T. AnyClimb: A New Wall-Climbing Robotic Platform for Various Curvatures. IEEE-Asme Trans. Mechatron. 2016, 21, 1812–1821. [Google Scholar] [CrossRef]
- Liu, Y.; Seo, T.W. AnyClimb-II: Dry-adhesive linkage-type climbing robot for uneven vertical surfaces. Mech. Mach. Theory 2018, 124, 197–210. [Google Scholar] [CrossRef]
- Hawkes, E.W.; Hao, J.; Cutkosky, M.R. Three-dimensional dynamic surface grasping with dry adhesion. Int. J. Robot. Res. 2016, 35, 943–958. [Google Scholar] [CrossRef]
- Autumn, K.; Dittmore, A.; Santos, D.; Spenko, M.; Cutkosky, M.R. Frictional adhesion: A new angle on gecko attachment. J. Exp. Biol. 2006, 209, 3569–3579. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shui, L.; Jia, L.; Li, H.; Guo, J.; Chen, X. Rapid and continuous regulating adhesion strength by mechanical micro-vibration. Nat. Commun. 2020, 11, 1583. [Google Scholar] [CrossRef] [PubMed]
- Pesika, N.S.; Yu, T.; Zhao, B.; Rosenberg, K.; Zeng, H.; Mcguiggan, P.; Autumn, K.; Israelachvili, J.N. Peel-Zone Model of Tape Peeling Based on the Gecko Adhesive System. J. Adhes. 2007, 83, 383–401. [Google Scholar] [CrossRef] [Green Version]
- Kendall, K. Thin-film peeling-the elastic term. J. Phys. D Appl. Phys. 1975, 8, 1449. [Google Scholar] [CrossRef]
- Tiwari, A.; Dorogin, L.; Bennett, A.I.; Schulze, K.D.; Sawyer, W.G.; Tahir, M.; Heinrich, G.; Persson, B.N.J. The effect of surface roughness and viscoelasticity on rubber adhesion. Soft Matter 2017, 13, 3602–3621. [Google Scholar] [CrossRef]
- Villey, R.; Creton, C.; Cortet, P.P.; Dalbe, M.J.; Ciccotti, M. Rate-dependent elastic hysteresis during the peeling of Pressure Sensitive Adhesives. Soft Matter 2015, 11, 3480–3491. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xiong, X.; Manoonpong, P. Adaptive Motor Control for Human-like Spatial-temporal Adaptation. In Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018; pp. 2107–2112. [Google Scholar]
- Wang, Z.; Dai, Z.; Yu, Z.; Shen, D. Optimal attaching and detaching trajectory for bio-inspired climbing robot using dry adhesive. In Proceedings of the 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Besacon, France, 8–11 July 2014; pp. 990–993. [Google Scholar]
- Xiong, X.; Manoonpong, P. Online adaptive resistance control of an arm exercise exoskeleton. In Proceedings of the 23rd International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines, CLAWAR, Moscow, Russian, 24–26 August 2020; pp. 31–38. [Google Scholar]
- Xiong, X.; Manoonpong, P. Resistance-as-needed (RAN) control for a wearable and soft hand exoskeleton. Gait Posture 2020, 81, 398–399. [Google Scholar] [CrossRef]
- Gagliano, S.; Stella, G.; Bucolo, M. Real-time detection of slug velocity in microchannels. Micromachines 2020, 11, 241. [Google Scholar] [CrossRef] [PubMed] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
 [1] [1] |  [2] [2] |  [4] [4] |  [13] [13] |  Proposed Robot Proposed Robot | |
|---|---|---|---|---|---|
| Suction | √ | √ | |||
| Magnetic | √ | ||||
| Claw | √ | ||||
| Dry adhesion | √ | √ | √ | ||
| Position controller | √ | √ | √ | √ | √ |
| Online impedance adaptive controller | √ |
| L | H | |||
|---|---|---|---|---|
| 70 mm | 60 mm | 10 mm | 0.45 | 1.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, B.; Xiong, X.; Duan, J.; Wang, Z.; Dai, Z. Compliant Detachment of Wall-Climbing Robot Unaffected by Adhesion State. Appl. Sci. 2021, 11, 5860. https://doi.org/10.3390/app11135860
Wang B, Xiong X, Duan J, Wang Z, Dai Z. Compliant Detachment of Wall-Climbing Robot Unaffected by Adhesion State. Applied Sciences. 2021; 11(13):5860. https://doi.org/10.3390/app11135860
Chicago/Turabian StyleWang, Bingcheng, Xiaofeng Xiong, Jinjun Duan, Zhouyi Wang, and Zhendong Dai. 2021. "Compliant Detachment of Wall-Climbing Robot Unaffected by Adhesion State" Applied Sciences 11, no. 13: 5860. https://doi.org/10.3390/app11135860
APA StyleWang, B., Xiong, X., Duan, J., Wang, Z., & Dai, Z. (2021). Compliant Detachment of Wall-Climbing Robot Unaffected by Adhesion State. Applied Sciences, 11(13), 5860. https://doi.org/10.3390/app11135860