1. Introduction
Wireless sensor networks (WSNs) can be reliable tools in agricultural management [
1], monitoring weather, crop and soil parameters using both underground and terrestrial sensors [
2]. However, in order to deploy wireless sensing systems in agricultural environments, several standards should be met and certain issues have to be addressed. Energy consumption is one of the most important aspects that limit the applications of WSNs in agriculture [
3], since all sensor nodes used in internet of things (IoT) systems are power-constrained [
4]. Energy efficiency, energy harvesting for powering the WSN devices, and energy prediction, were recognized as the key aspects to tackle this issue [
5]. Solar energy can power such sensor systems, achieving self-sustained operation [
6], making solar harvesting a very popular solution. However, solar radiation is a non-controllable energy source and the amount of energy varies significantly over time, making prediction of energy availability a critical issue [
7]. Currently, most wireless sensing systems are either powered by small batteries and completely rely on energy efficiency maximization in order to last for acceptable amount of time [
1], or require the setup of a logger located at a central position powered by an electricity distribution network. However, this is not a viable option for agricultural applications, since the possibility of connecting to a power line in the field is extremely limited.
Another important aspect in agricultural WSNs is the wireless communication among the different nodes within the network. Therefore, the selection of the appropriate communication protocol for the specific properties of each application is particularly important. Throughout the course of development of wireless sensing systems, several communication protocols and communication standards were developed, each presenting certain strengths and weaknesses. The ZigBee, LoRa, and SogFox wireless protocols show low power consumption and acceptable or long communication range; therefore, they are identified as suitable options for agricultural applications. However, LoRa and SigFox are not fully open-sourced protocols [
8]. In addition, sensor networks based on 2.4 GHz, such as ZigBee, are prone to interference and range issues. The 868 MHz are less popular networks despite their positive characteristics. According to recent studies, their range can be up to 300 m without any packet losses, significantly further than the 2.4 GHz protocols, showing an average Received Signal Strength Indicator (RSSI) of above 40 percent [
9].
Furthermore, special care should be taken into considering the definition of the topology for the wireless sensor node allocation [
10]. The environment in urban ecosystems is relatively stable, without significant fluctuations of the shapes and obstacles that could deteriorate the connectivity of the wireless systems’ nodes over time. Conversely, in agricultural ecosystems the environment is dynamic and constantly changes, following the seasonal climate fluctuations that affect the plants’ physiology, as well as the natural growth of perennial plants with time. This fact makes the study of field topography and environment for proper positioning of the components of wireless sensing systems in agricultural environments a particularly complex task. For example, in tree crops, canopy development during spring blocks a significant proportion of the wireless signal, obstructing the communications between nodes installed in the orchard.
A fundamental aspect when deploying wireless sensor networks in the field is studying the spatial properties of the parameters of interest and allocating the sensor nodes accordingly [
11]. This practice requires performing a comprehensive study of the topology in order to make sure that the communication between the sensor nodes is not obstructed by obstacles that are deteriorating the communication range. If correctly applied, the abovementioned sensor allocation study leads to better allocation of resources minimizing the costs, while maximizing the efficiency of the system’s operation. Precision agriculture applications and technologies can be particularly handy in field topography mapping and management zones delineation, which can be used for better allocation of sensor nodes. These management zones should ideally be temporally stable. This can be achieved if these zones are delineated based on parameters that show low temporal variability, such as landscape and soil properties [
12]. Soil electrical conductivity (EC) is a measurable soil parameter that is well corelated to soil properties such as texture, organic matter, soil moisture content and others. Furthermore, with the rise of the concept of precision agriculture, several commercial sensors were made available making EC a very popular candidate for delineating soil management zones [
12,
13,
14]. Numerous machine learning algorithms are used in agriculture for different operations [
15], with field classification being one of them. One of the most popular classification methods for delineation of management zones is fuzzy clustering. It is an explorative data analysis technique that has been successfully used for delineating management zones based on soil electrical conductivity (EC) and soil parameters, in the framework of precision agriculture [
12,
13,
14].
Another basic constraint in the use of wireless sensing systems in agriculture is the fact that the end users of such systems, the farmers, are not particularly skilled with electronics, programming, and sensing systems [
16]. Therefore, the systems need to be simple in installation and usage, offering a plug and play experience to the farmers.
Based on the literature review, the main gaps presented in the field of wireless sensing systems that make them non-viable for agricultural use are related to cost, complexity, reliability, energy consumption and energy dependence. In this work, a low cost, low power consumption, and simple wireless sensing system dedicated for agricultural environments, is presented. The system architecture selected for this work was simple and straightforward to avoid complications in the operation, increasing the reliability of the network. The main goal was to develop a light wireless system architecture that can be applied to small-medium sized fields, located anywhere with cellular network coverage, even in isolated rural areas. The developed system was evaluated in laboratory and in field conditions in a commercial orchard where smart farming technologies were utilized for better allocation of sensor nodes.
2. Materials and Methods
Work in this study is divided in three main tasks; hardware development, programming and software development, and system evaluation (laboratory and in-field performance evaluation).
2.1. Hardware
The wireless sensing system was developed on open-source Arduino-based sensor platform. Radiofrequency at 868 MHz was selected for the communication of the End-nodes with the Coordinator. Usually, in such networks, the battery powered nodes are wirelessly connected to a communication gateway to forward the data [
10]. It is important to clarify that the Coordinator in our system was the same dummy device as the End-nodes, however, it was programmed differently to serve the specific task of collecting the data from all the End-nodes of the network. The Coordinator was also equipped with a 4G module for the connection of the wireless local network to the cloud via 4G cellular network. The sensors and parameters measured by the developed system are summarized in
Table 1. All sensors have minimum operational temperature range of −40~+85 °C, making them suitable for all weather conditions.
2.2. System Architecture
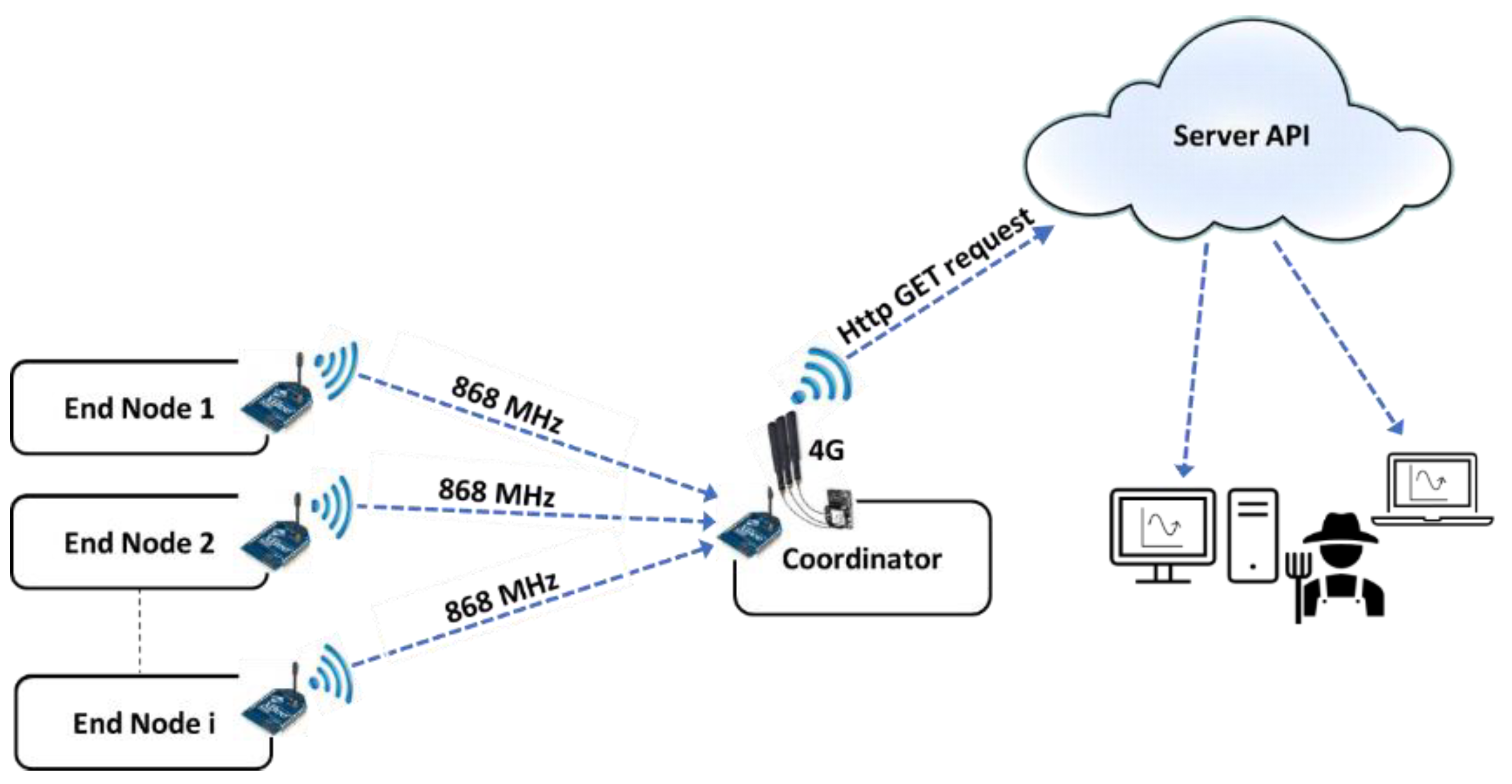
The network was based on a simplified communications architecture. A star topology was followed, based on which the Coordinator was positioned at a central location and all the End-nodes were placed in surrounding positions within the communication range. In that sense, the End-nodes were responsible for the data collection, while the Coordinator was responsible for collecting the data sent by the End-nodes, and sending them to the cloud server (
Figure 1).
2.3. Data Flow
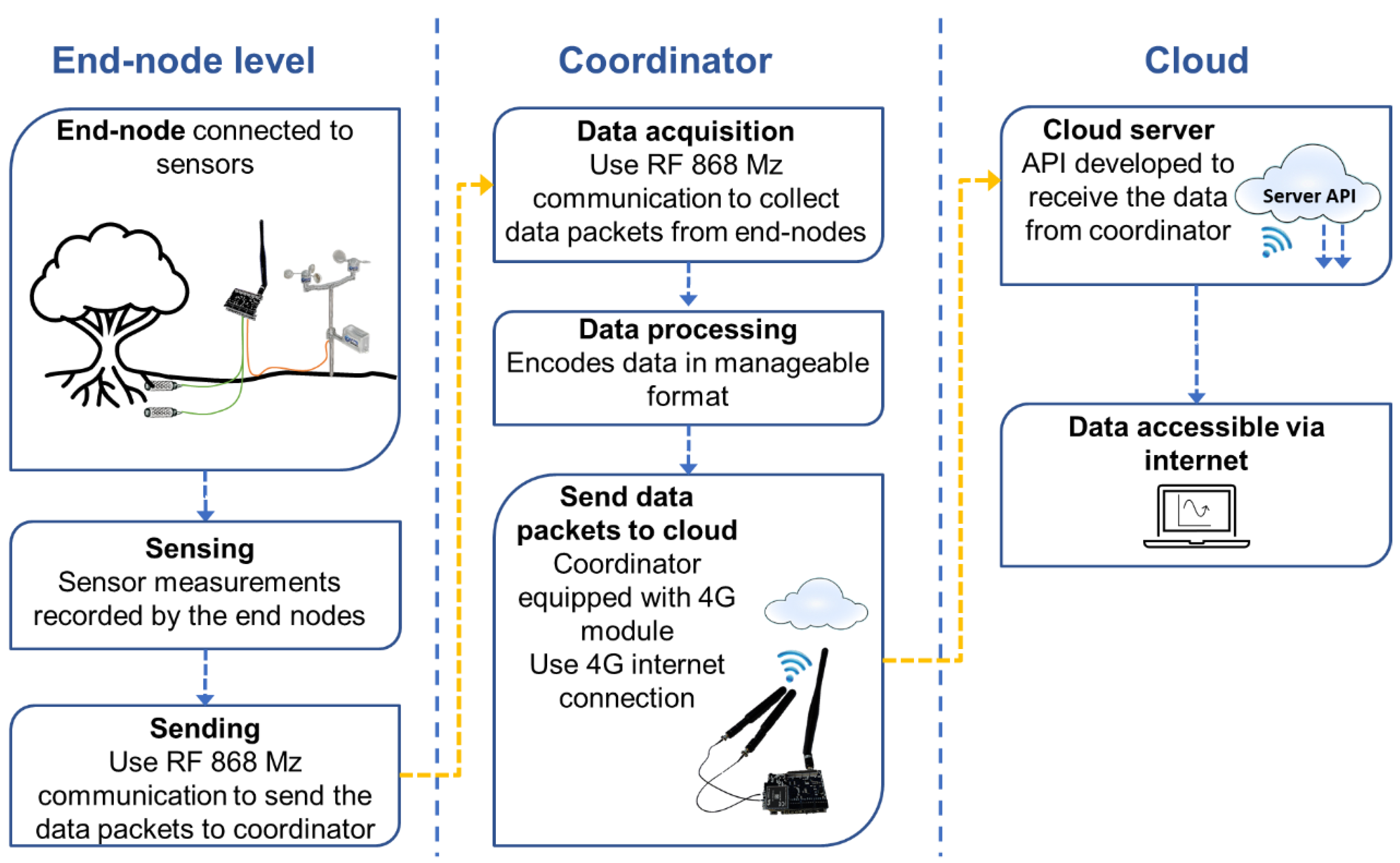
The workflow and the flow of the data acquired in the field are described in the following steps (
Figure 2):
The sensors are wire-connected to the End-nodes. The nodes request the measurements at certain time intervals, according to their programming, and record the values. The values are encoded in data packets and temporarily saved in the node’s memory.
The data packets follow a certain data flow path. The end-nodes send their data packets directly to the Coordinator via 868 MHz radiofrequency, which processes the information and reforms the messages accordingly, converting them into the appropriate data format.
The Coordinator sends the reformed data packets to the cloud via 4G cellular network.
An application programming interface (API) was developed to establish the communication of the wireless agricultural network with the cloud server making the datasets immediately available to the user.
The user can access the database via internet, and download or preview the data in real time (
Figure 2).
2.4. Energy Consumption
Each node of the wireless system (Coordinator and End-nodes), was powered by a 6600 Ahr rechargeable battery, connected to solar panel providing 3 Watt a voltage of up to 7.14 V, depending on the available solar energy to be harvested. The energy consumption and charging capacity were tested under unfavorable conditions (shaded to simulate cloud covered conditions) to evaluate the limits of the system, assuring unsupervised, uninterrupted operation of the nodes in real field conditions.
2.5. Field Experiment
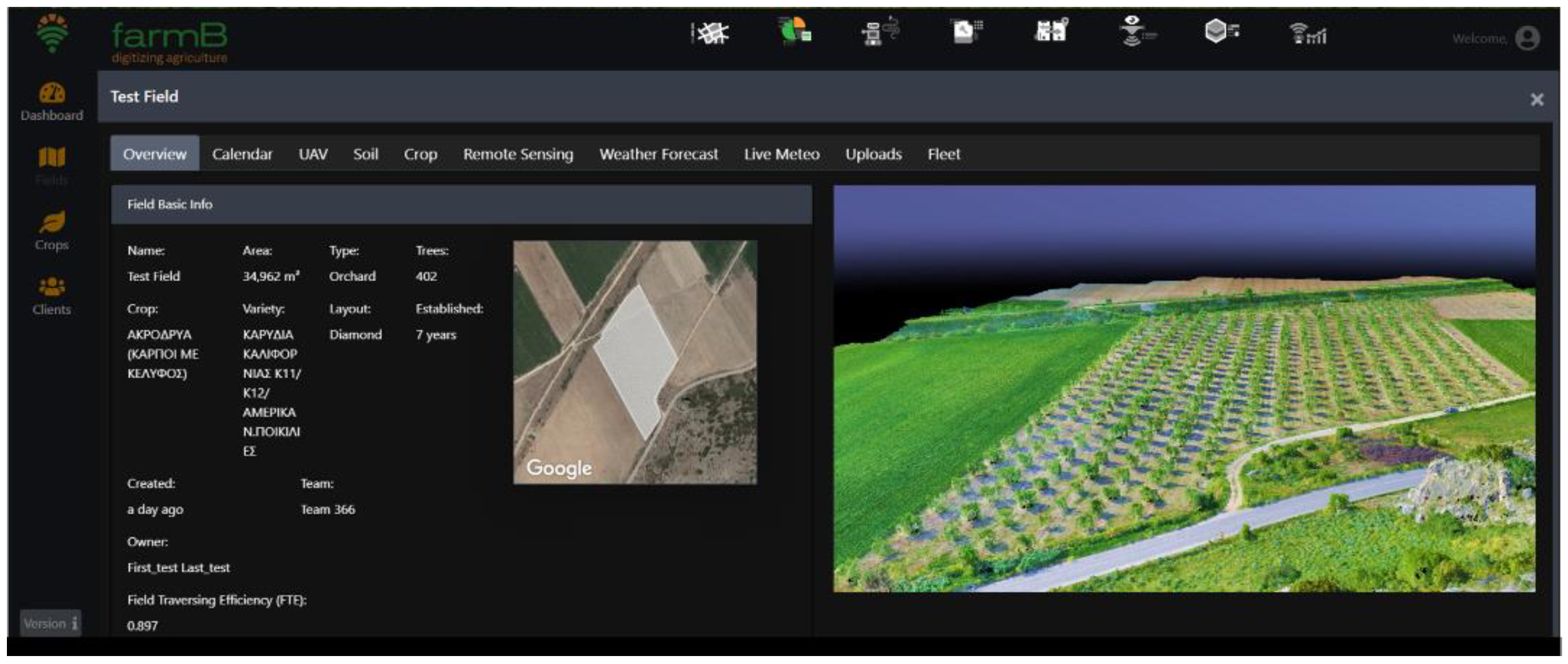
The system was evaluated for its performance and operation in real field conditions, in a trial setup in a 4-ha commercial walnut orchard, located in central Greece. Field surface elevation was mapped using a high precision GNSS (Real time kinematic; Spectra Geospatial, Trimble Inc., Sunnyvale, CA, USA) achieving an accuracy up to 2 cm. The same device was also used to georeference the soil apparent electrical conductivity (ECa) measurements acquired using EM38 MK2 (Geonics Ltd., Mississauga, ON, Canada) electromagnetic sensor. The sensor probe was setup at vertical dipole mode, mounted on a customized sledge, pulled in the orchard between the tree rows to map the whole surface of the field. With the specific setup, the system performed soil ECa mapping at two depths; namely at 0.65 m and 1.4 m, since it regards tree crops [
17], where the active rootzone is located deeper than arable crops.
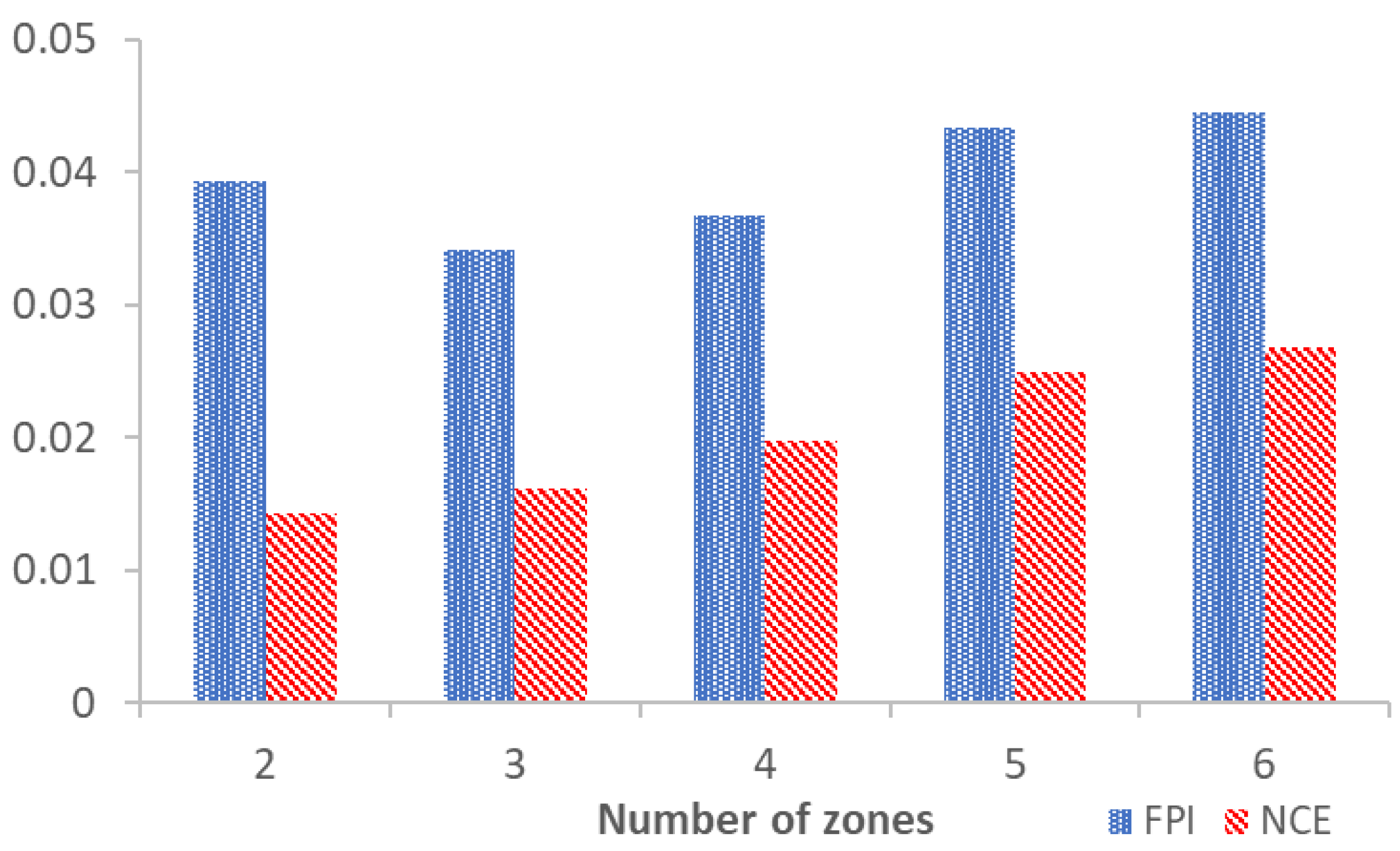
The georeferenced elevation and ECa datasets were analyzed using fuzzy clustering algorithms to delineate management zones for the allocation of the sensor nodes. Two performance indices were used to define the optimum number of management zones; the Fuziness Performance Index (FPI), and the Normalized Classification Entropy (NCE) [
18]. The categorization is optimal when both indices are minimized.
Since the trial field was a walnut orchard, the walnut trees were expected to obstruct the field of view between the End-nodes and the Coordinator and, as result, the communication range could become significantly deteriorated. Agricultural environments change dynamically with time. Particularly in deciduous trees, the changes in canopy shapes are seasonal and therefore maximum signal obstruction is expected in the summer when the tree canopies are fully developed. On the other hand, decreased signal obstruction is expected during winter, after all leaves fall off, with a minimum after pruning operations.
Therefore, the topology of the orchard’s environment was mapped by creating a 3D point cloud, in order to efficiently position the nodes. A quadcopter Unmanned Aerial System (UAS) (Phantom 4, DJI Technology Co., Ltd., Shenzhen, China) equipped with a high resolution RGB camera, and high accuracy (RTK) GNSS, was used to acquire a high quality orthomosaic of the orchard during summer (for maximum canopy coverage), following a detailed flight mission. The orthomosaic was further analyzed resulting the 3D point cloud of the orchard. Based on the 3D point cloud, the orchard’s topology was studied, and the nodes and Coordinator of the wireless network were positioned accordingly. Four nodes were installed in the field in order to test the network’s performance and limitations in communications and operations.
3. Results and Discussion
The system was developed, programmed, and evaluated both in laboratory and field conditions. A set of indoor trials took place in order to assure the undisturbed and continuous operation of the system. The first test included energy consumption and operation under unfavorable solar energy harvesting conditions. According to literature, to enhance the lifetime of the wireless network, the energy consumption should be minimized by using energy harvesting and adjusting the duty cycle [
1,
19]. In addition, following protocols according to which the data packets are transmitted to the Coordinator from distant nodes via intermediate nodes, requires smart routing protocols to define the best pathway to limit the number of transmissions, minimizing energy consumption [
20,
21].
In our network, a star communication topology was selected. Therefore, the network operation was simplified and the energy demands were limited. Solar energy harvesting panels were used to charge the batteries powering each node of the network. As in most Wireless Regional Area Networks (WRAN), the system consisted of a base station, referred as Coordinator, and peripheral devices wirelessly connected to the Coordinator, the End-nodes. According to this widely used protocol, the End-nodes only send their data to the Coordinator which is responsible for the management of the whole network’s data management [
2]. A dedicated API was developed to establish the communication of the wireless agricultural network with the cloud server. The resulting wireless sensors network is intended to become part of a decision support system (DSS) to assist farmers manage their fields in timely and effective manner. The API is designed to link the wireless sensor network with a central farm management information system (farmB; farmB Digital Agriculture P.C., Greece) that automatically receives and processes the data packets providing the results in the form of easily interpretable graphs and tables. The user-friendly interface will ensure intuitive operation of the system to all users. A similar approach was followed by Kim and Evans [
22], who developed a software integrated with in-field sensor network using Bluetooth wireless radio communication for site-specific irrigation control.
3.1. Programming Features
Recent advances in electronics have made available components and microcontrollers with considerably low power consumption. Efficient programming of each part of the system (e.g., set in sleep mode until measurement, how often to acquire measurements or send data packages to the cloud etc.) can guarantee feasibility and sustainability of the wireless sensors network in agricultural operations. Since the goal of this project was to develop a simple, low cost, and low energy wireless system, dummy devices were selected as the core hardware and great emphasis was given to their programming. Special attention was provided to achieve low energy consumption. Reducing energy consumption is the primary technique to enhance a network’s lifetime [
1].
For the sake of simplicity and in order to minimize energy demands, the End-nodes and the Coordinator were not synchronized. Because the End-nodes were sending the data packets asynchronously, the Coordinator was programmed to remain continuously operated, to avoid missing information from the nodes. A programming feature for limiting energy consumption of the Coordinator was the 4G module operation optimization. According to this script, the 4G module, which is one of the most energy consuming components, was set by default to off mode and turned on only to make the link and send the packets to the cloud via 4G cellular network.
In addition, in case any of the End-nodes lost connection or were unable to communicate, e.g., due to traffic, it repeated the call until there was a successful packet delivery. For safety purposes, all data packets were also recorded in an external micro-SD card installed in each node, allowing manual acquisition of the acquired datasets, in case of connection failure. A star topology was followed, which means that each End-node was exclusively “talking” to the Coordinator. Thus, the Coordinator was responsible for a demanding task, receiving, transforming, and uploading the data packets from the End-nodes. Therefore, it was relieved from the task of collecting measurements for itself, so it was able to accommodate as many End-nodes as possible.
The End-nodes were programmed to stay in sleep mode, “wake up” to acquire the measurements from the sensors and send the data packet to the Coordinator. In case of raining conditions, all the nodes were programmed to automatically set to operation mode, record the event and the total amount of precipitation, and go back to sleep after the event finishes. Duty cycling is a well-known effective method to extend the lifetime of the batteries powering the system [
19]. Adjusting the duty cycle, setting the operation of the nodes in sleep mode according to the sensing and communication needs, can significantly reduce the energy consumption of the nodes by optimizing the trans-receiver operation [
1].
A second programming option was also evaluated. In this setup, the coordinator was programmed in full operational mode, which apart from the End-nodes data handling tasks, was also receiving full measurements packets for itself. This type of network was even more economical, and based on the tests results, it was proved a viable option. However, this network configuration had only three nodes, including the Coordinator and two End-nodes. Therefore, this programming option is preferable when small networks covering up to three measurement locations in the field of interest are considered. Due to the small number of end nodes, the Coordinator in this programming option was set to go to sleep after receiving and sending to the cloud all data packets of each cycle. This way, extra energy saving could be achieved to compensate for the energy required to acquire measurements from the sensors attached to it.
3.2. Energy Consumption
The nodes’ lifetime is one of the most important factors in the networks’ reliability. The ratio of energy harvesting to the consumption rate is a vital parameter [
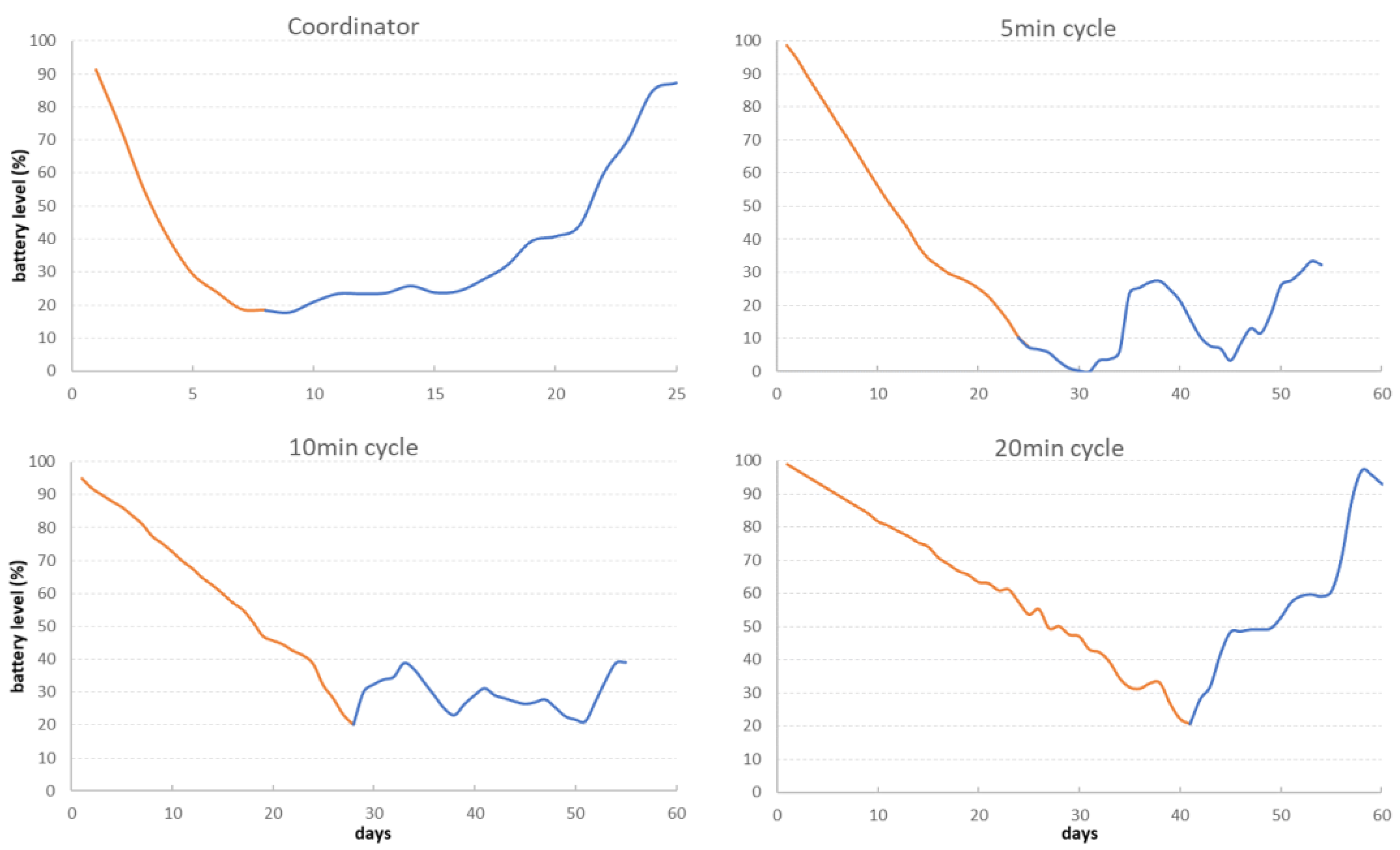
1]. Therefore, in our study, exhaustive tests on the energy consumption were performed. The tests included operation of the End-nodes at different sleep cycles and data acquisition intervals of 5, 10, and 20 min, while the Coordinator was in always-on mode. The main concern was to ensure that the charging/discharging ratio was adequate to assure continuous operation of both the Coordinator and the End-nodes of the network.
According to literature, the majority of the nodes as parts of wireless system networks applied in agriculture are powered by battery alone, which in most cases lasts for few weeks [
1]. In our study, the coordinator’s battery reached the 20% of its capacity within seven days of operation relying solely on battery (
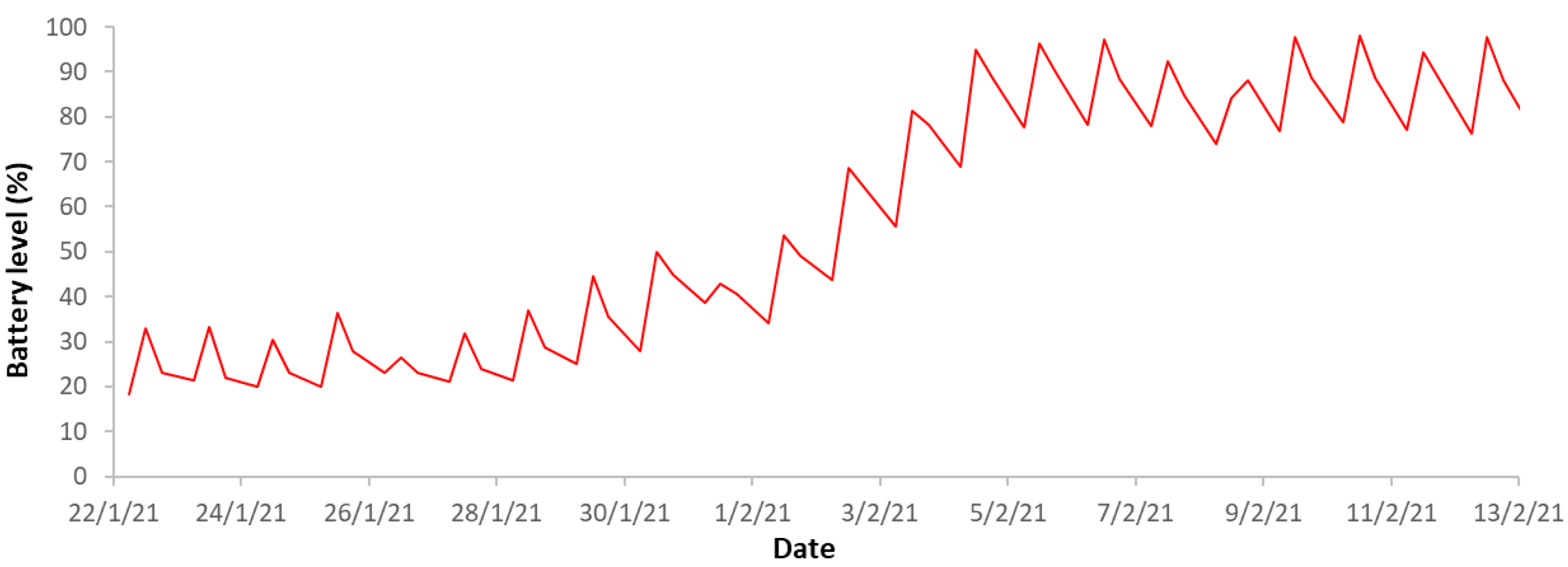
Figure 3). This is considered as a satisfactory result since this node stayed always on, receiving all the data packets from the End-nodes, using the RF-868 MHz communication of the local wireless network and sending them to the cloud via 4G cellular grid using the 4G module. Thus, this node performed the most energy demanding operation. After depleting to 20% of the battery capacity, the solar panel was connected to study the charging rate under unfavorable weather conditions, to confirm continuous operation of the coordinator in real field conditions. The panel was positioned at a shaded location to simulate cloudy conditions in order to examine the worst-case scenario; operation under extended continuous of low solar radiation conditions. The initial setup was proved inadequate to charge the battery, thus, a second panel was set in parallel connection to increase the harvested energy. After these modifications, the system was proved to be energy efficient even at the most unfavorable conditions; cloudy weather during winter with limited daylight duration (580–630 min during January to mid-February when the tests were realized). These conditions were extremely unfavorable for the coordinator’s energy balance, however, the energy harvested during the day was adequate to maintain the daily energy level accumulated in the battery which progressively increased with time (
Figure 4). The Coordinator showed particularly satisfactory performance, handling 14 packets per hour (receiving packets from peripheral nodes, manipulating the content and sending them to the cloud). Therefore, such energy efficiency is expected with the coordinator connected to up to 14 peripheral nodes, programmed to send packets on hourly basis, or up to 7 End-nodes, sending packets every 30 min.
As mentioned above, the End-nodes were examined at three sleep cycle scenarios. The results showed that even in the most demanding operation cycle (waking up every 5 min to take the measurements, send the data packet and set back to sleep mode), the node operated without any disruptions (
Figure 3). The battery reached the 20% of its capacity within 22 days of operation. On the 24th day of operation, the node was connected to the solar panel to evaluate the charging capacity in operation mode. In the first week the weather was considerably cloudy, thus the battery continued to discharge but with a slower rate. Once the solar radiation increased, the battery showed a rapid charging ratio, however, after that point, the battery level showed quite unstable behavior depending on the weather conditions. Concerning the node set to 10-min cycle, the discharge of the battery was slower than the 5-min cycle reaching the 20% of its capacity in 28 days. When the solar panel was connected to the node, the battery level had quite stable behavior, with an increasing trend depending on the solar radiation intensity. Finally, the node programmed to 20-min cycle lasted longer than the two other cycles, reaching 20% of the battery capacity in 41 days. After connecting the solar panel, the battery recharge was continuous, with slower rate during the days with low solar radiation. Therefore, the 20-min sleep cycle is considered as the minimum safest option ensuring continuous operation all year long.
3.3. Topology–Sensor Nodes Allocation
Apart from the laboratory tests, the system was installed in a commercial orchard to evaluate its performance in real field conditions. The orchard size was 35 ha which is considered a medium sized field for tree crops in Greece and other countries in southern Europe. A basic analysis of the orchard’s topology and soil spatial properties was performed to define the most appropriate positions for nodes installation. In the literature, sensor deployment was setup following a structured pattern at strategic positions in the field [
23]. According to [
10], the first phase in the deployment of wireless nodes in agriculture is performing an exhaustive study of the terrain in terms of geographical, topographical, and climatic points of view, for more efficient allocation. A soil map should be added to classify the field into zones.
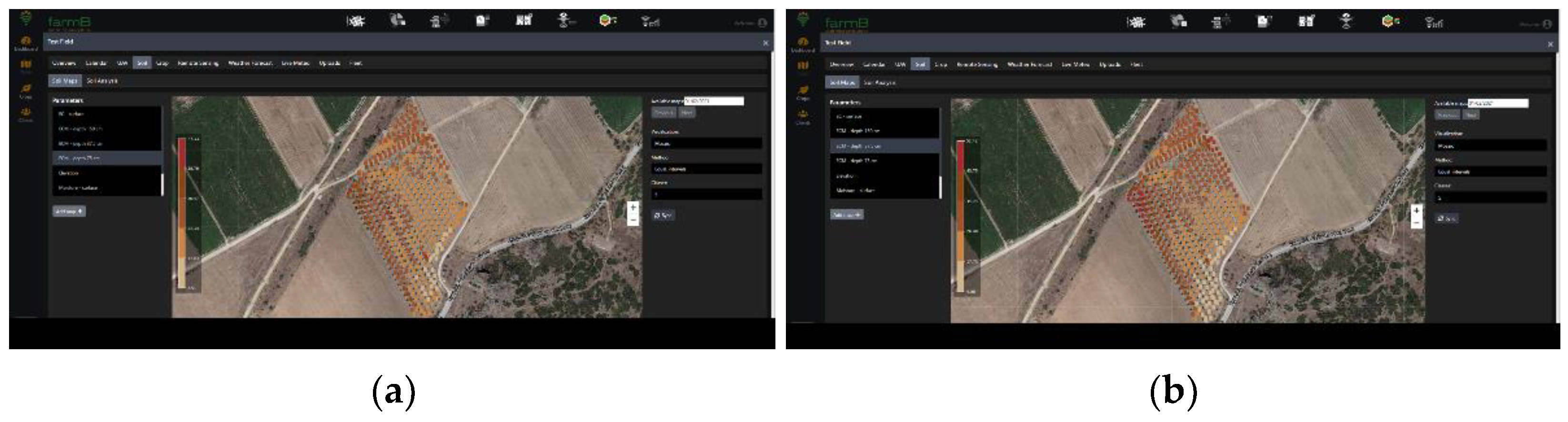
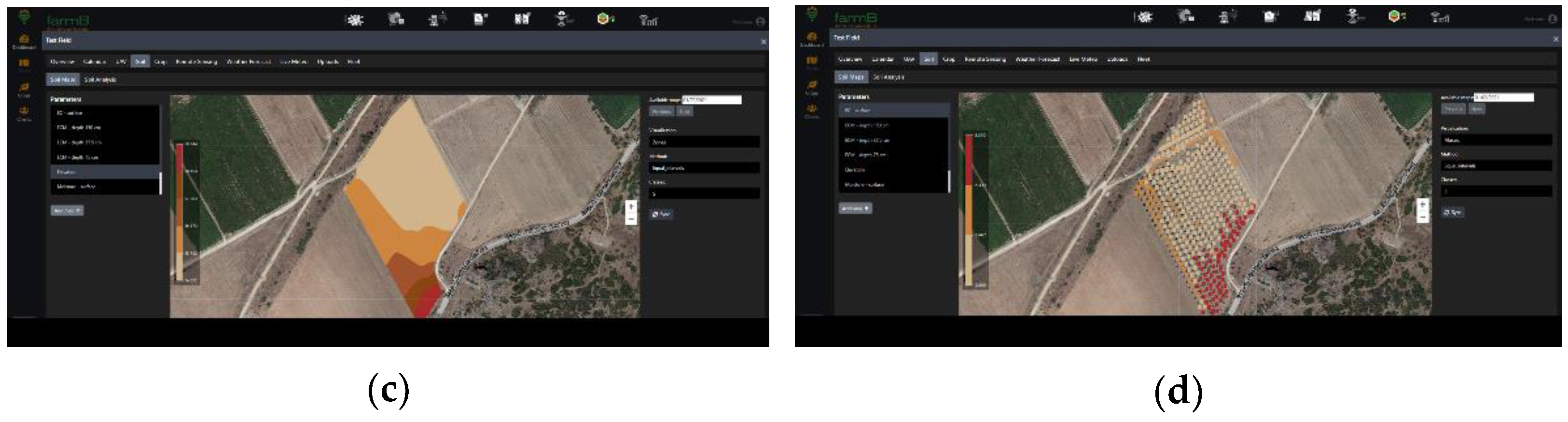
In our study, the soil ECa data acquired by the EM38 electromagnetic sensor, were analyzed using a fuzzy clustering algorithm. Three parameters were introduced in the management zone analysis; the ECa deep measurement (1.4 m), the ECa shallow measurement (0.65 m), and the surface elevation acquired from the RTK GPS used for georeferencing the ECa measurements. Based on the analysis, the FPI and NCE were minimal for the delineation in three zones (
Figure 5). Therefore, three sensor nodes were adequate to monitor the experimental orchard, allocating one in each zone (
Figure 6).
The images acquired by the UAS were analyzed in the farmB.eye module of farmB farm management information system to export the orthomosaic and the 3D point cloud of the orchard’s environment (
Figure 7).
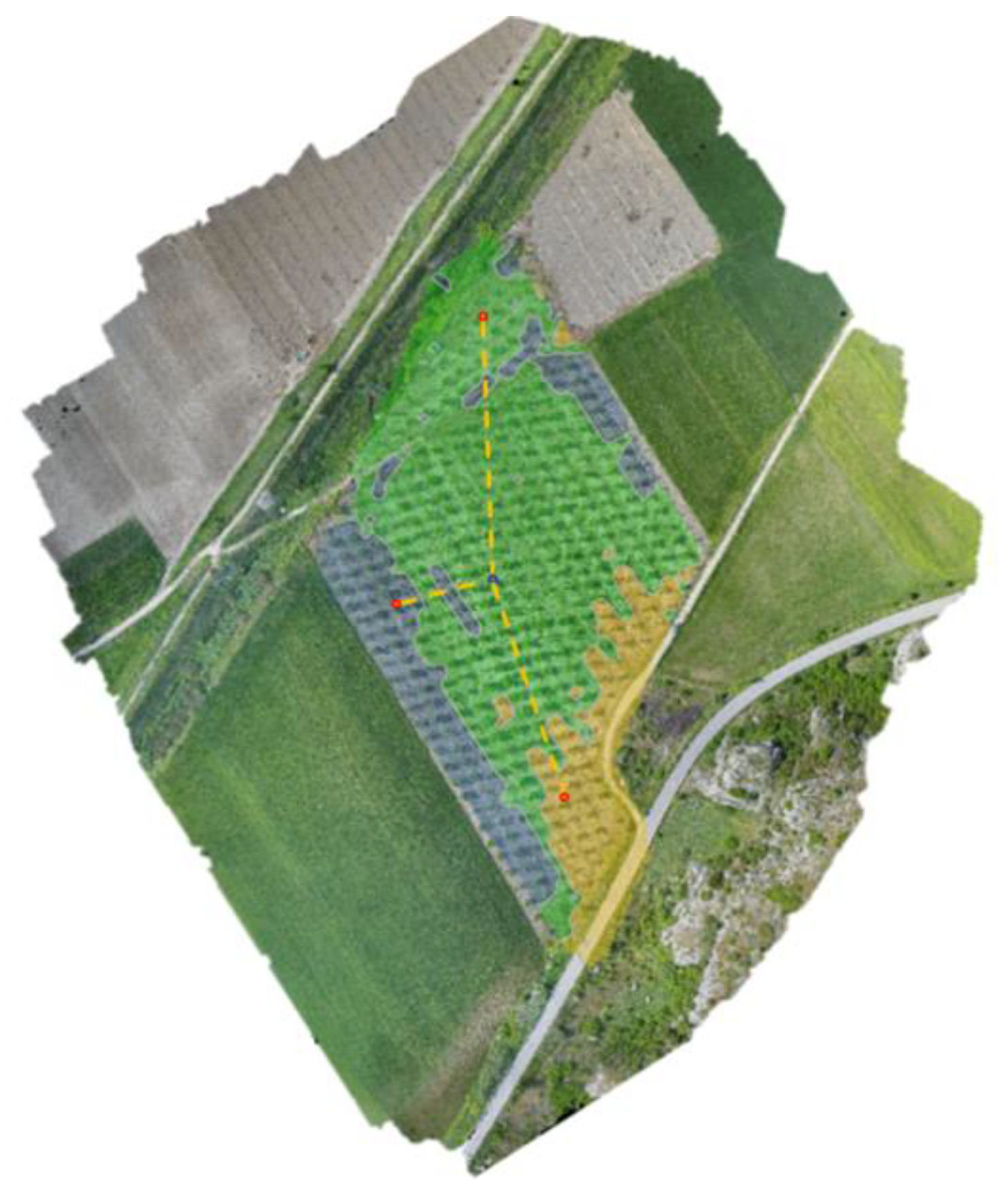
The soil management zones, defined by the spatial analysis of soil ECa and field elevation data, were overlayed on the 3D orthomosaic of the orchard. Based on the 3D point cloud, the nodes were positioned in the orchard at locations with the clearer fields of view with the Coordinator. Special care was given to setup a node in each major management zone that shows unique and uniform soil properties (
Figure 8). This way, the data acquired by the sensors are representative of the specific management zone where each node is installed.
More parameters could also be taken into account in our decision for locating the nodes, such as yield spatial variability or other crop spatial properties. However, the scope of this work was to study the properties and limitations of the developed wireless sensing system and locate the soil moisture sensors at representative locations. Thus, only communication based on the landscape and topology properties and the soil variability were taken into consideration.
3.4. Communication Range
The communication range between the nodes in the field depends on the communication protocols and the frequency used by the network. In our network we used the 868 MHz radio frequency for the communication of the End-nodes with the Coordinator due to its reliability, despite its shortest nominal range compared to other protocols [
9]. The communication range between the Coordinator and the End-nodes was tested in real field conditions. For the in-field evaluation, one of the nodes was programmed as the Coordinator working in continuous operation and a peripheral node was programmed to send a packets every 10 s. The Coordinator was temporarily installed at a steady location in the experimental orchard, and the End-node was relocated further from the Coordinator until the point where the communication was lost. According to the results of the in-field communication range evaluation, the nodes could communicate untroubled, without missing any packets, at distances considerably longer that 250 m. Therefore, in our calculations, a maximum communication range of 250 m was taken into account. Considering that our network was based on a Star communication topology, the maximum field size that this network can serve is 36 ha, depending on the shape of the field (in our calculations we assumed the field was rectangular shaped, which is the best case, but quite common scenario). According to the official statistics released by Eurostat, in 2013 the average size per agricultural holding in the European union was 16.1 ha [
24]. Therefore, the developed wireless sensors network can serve as a viable low-cost solution applicable to the majority of orchards and other agricultural crops in European countries.
3.5. Number of END-Nodes
The developed network has a maximum number of End-nodes that the Coordinator can serve. In some studies, a large number of nodes were reported to participate in wireless networks [
8,
10,
23,
25]. However, the vast majority of wireless networks use gateway/data logger to collect process and send the data from all nodes, which are usually powered by the grid and show increased processing capabilities. As already mentioned, in our novel system, the Coordinator is the same “dummy” device programmed to serve as the main hub on the network to collect the data packets and send them to the cloud after the required data modification. Therefore, the Coordinator’s capabilities were limited. The energy tests produced reliable outcomes for the evaluation of the system’s limitations. The network showed satisfactory performance, without any packet losses, connectivity or other issues hosting up to seven End-nodes programmed at a 30-min cycle, or 14 nodes at an hourly data acquiring cycle. Since the maximum field size that the proposed network can serve is 36 ha, setting one node every 2.6 ha is considered adequate for precision agriculture monitoring applications.
4. Conclusions
In this study, a simple, low cost, and low energy consuming wireless sensor system was developed, deployed, and evaluated. The star communication protocol was selected as the most appropriate for the sake of simplicity in communication and programming, which facilitated low energy consumption. Using this protocol and with a communication range longer than 250 m, as measured in the experimental orchard, this system can safely cover the needs of orchards and any other agricultural fields, sized up to 36 ha, with only one network. This network can support up to seven nodes in a 30 min data acquisition cycle, or 14 nodes in an hourly cycle, both of which are adequate solutions for orchards of such size. The novelty of the developed system lies in the fact that it uses a dummy device as Coordinator which through simple but advanced programming can receive, process, and send data packets from all End-nodes to the cloud. Two Coordinator programming modes were examined, both showing reliable operation; (i) the Coordinator serving both as a central node and as End-node (receiving measurements for itself, receiving data packets from the rest of network’s nodes, reforming messages and sending to cloud), and (ii) the Coordinator serving only as a central node (receiving data packets, reforming messages and sending to cloud). The first option is suggested for small networks of up to three nodes, while the second is the ideal solution for situations where more sensing locations are required (3 to 14 End-nodes). The laboratory and in-field tests confirmed reliable, continuous, and independent operation of the developed system in agricultural environments.
The orchard’s size was typical for the southern European conditions, thus, the results of this application apply to the majority of agricultural fields. Temporally stable management zones were derived from soil field measurements. The analysis performed using a fuzzy clustering algorithm on soil ECa and elevation data acquired from the experimental orchard, providing better categorization when delineating into three management zones, which is quite common for fields of such size (4 ha). Combining management zones and 3D point cloud data derived from UAS can prove particularly handy for efficient wireless sensor nodes allocation, setting the nodes at representative locations of each subsection of the field, and improving communication.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}