
Task-Based Design Approach: Development of a Planar Cable-Driven Parallel Robot for Upper Limb Rehabilitation

 ,
,  ,
, 
 , and
, and 
Abstract
1. Introduction
2. Materials and Methods
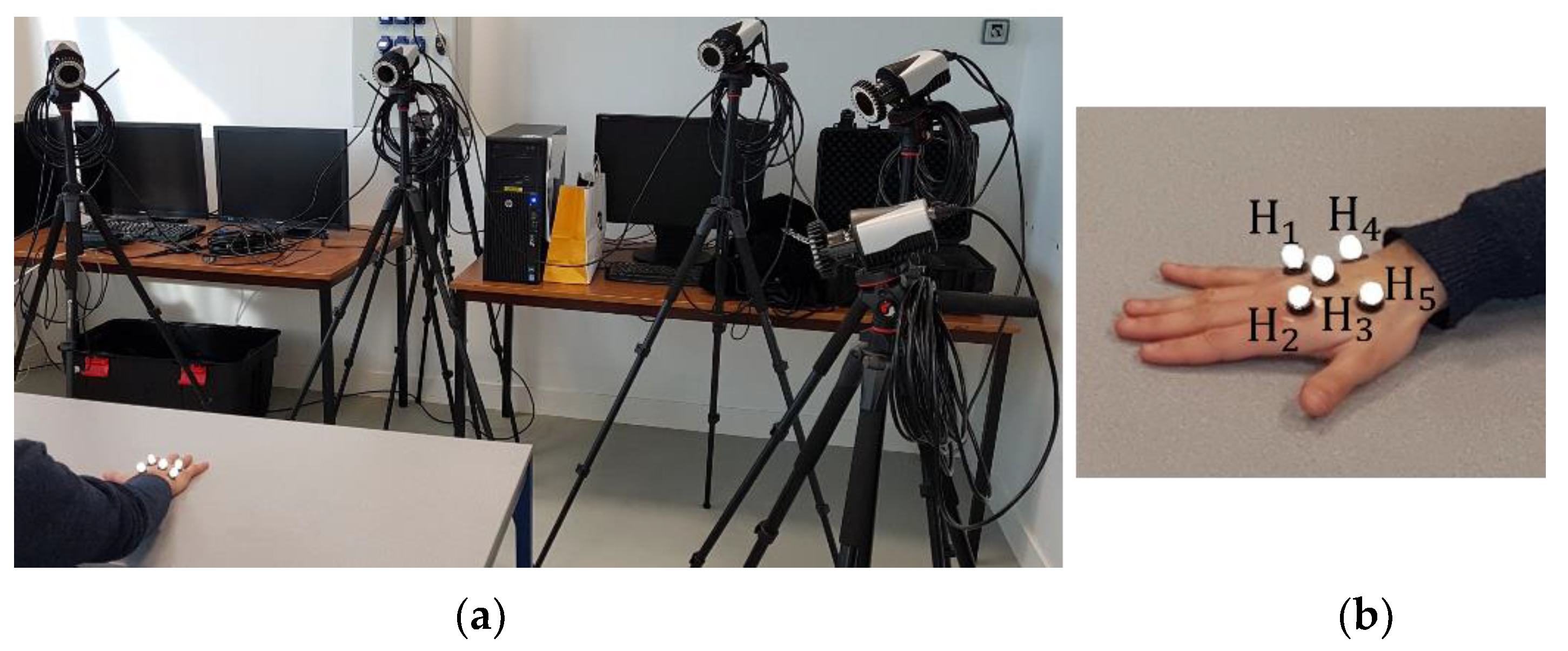
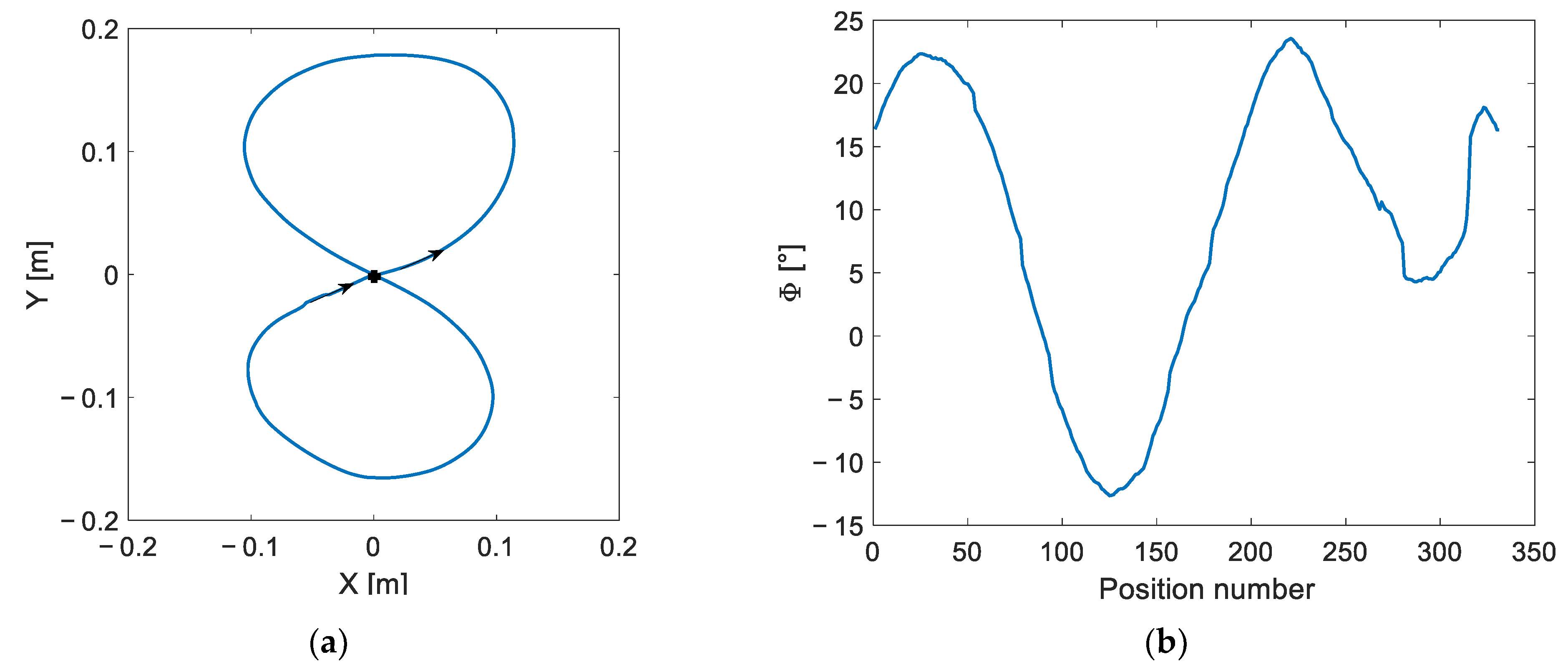
2.1. Prescribed Exercise Analysis
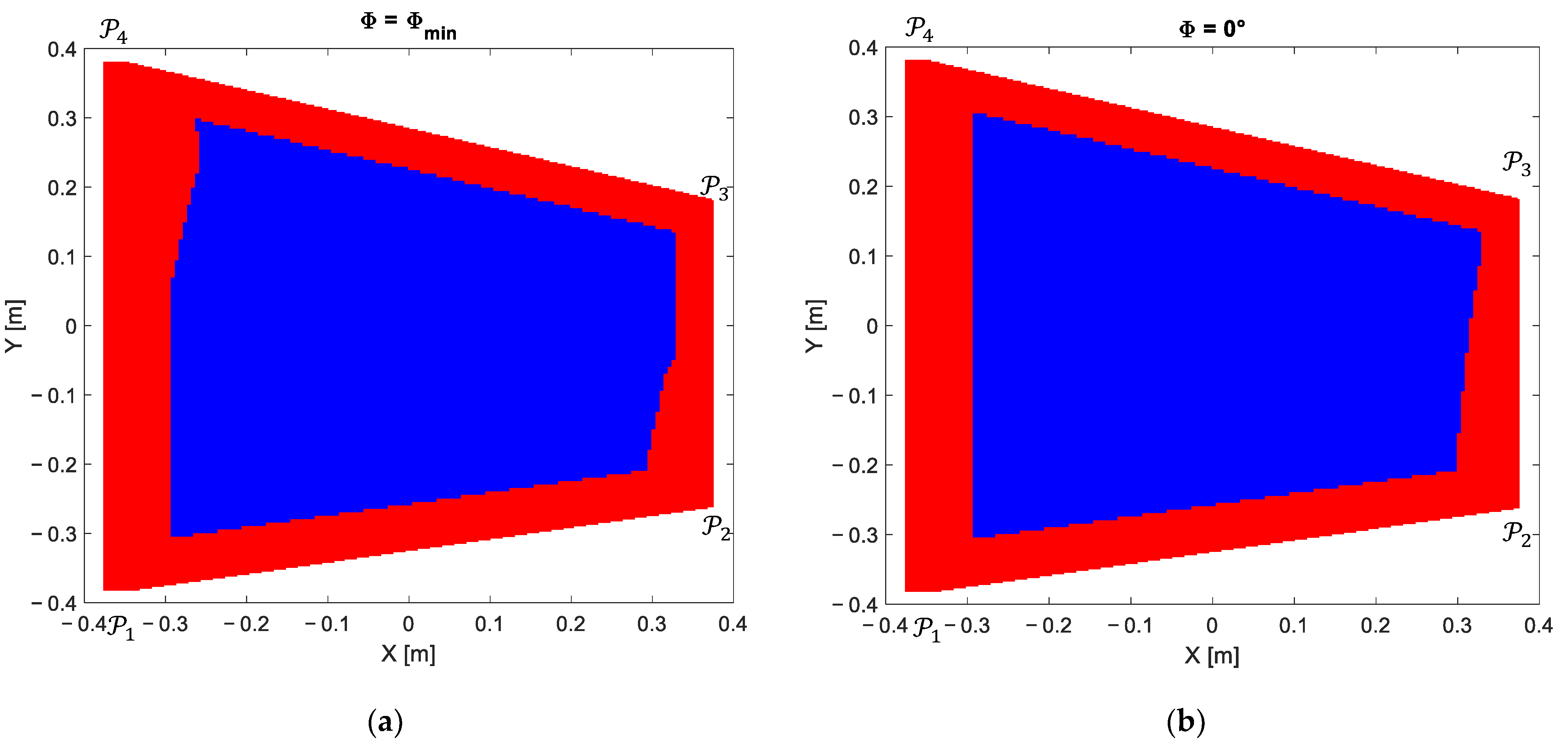
2.2. Optimal Synthesis Problem and Its Formulation
3. Results and Discussions
3.1. Multiobjective Formulation
3.2. Mono-Objective Formulation
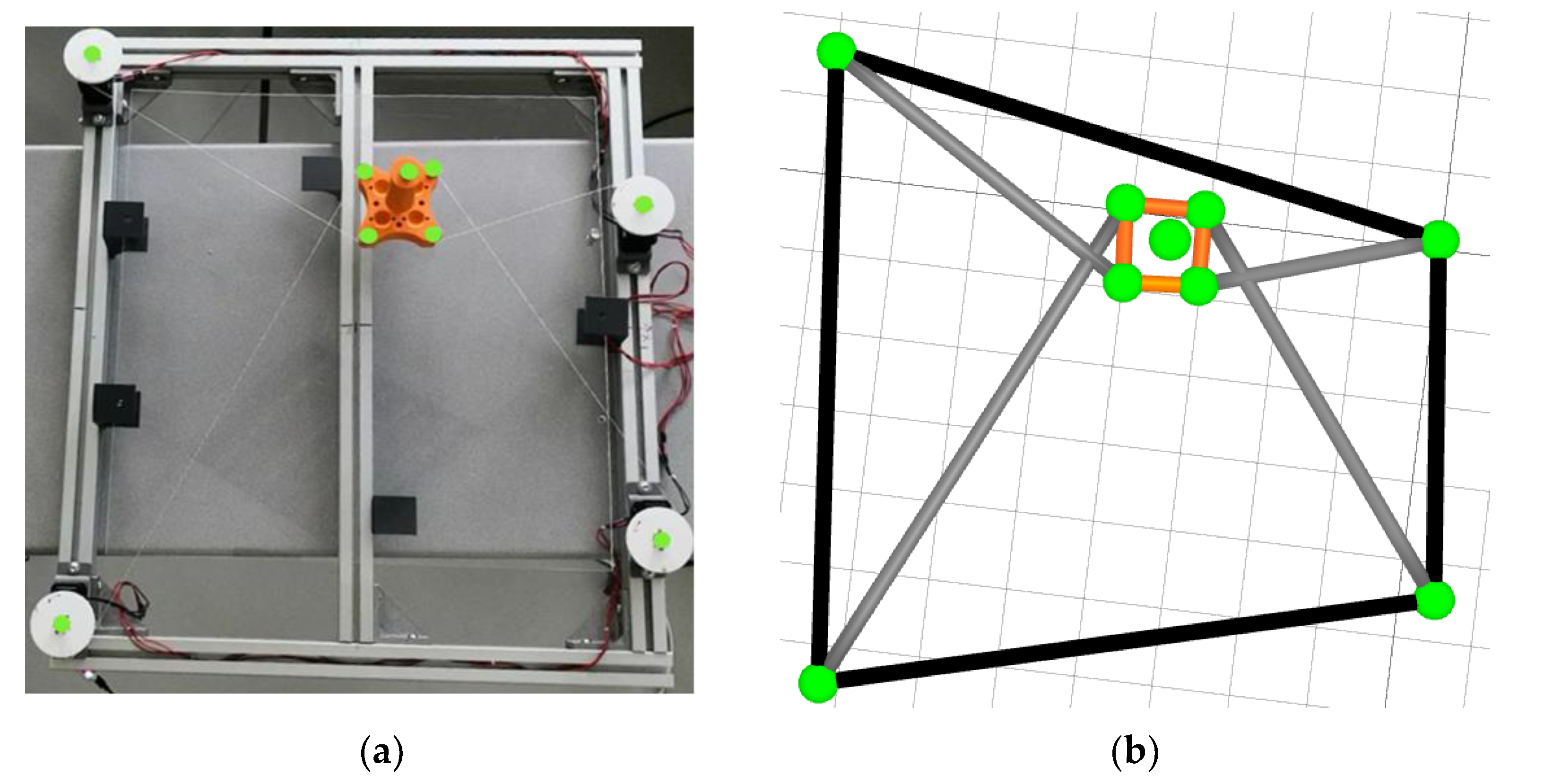
4. Experimental Validation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Babaiasl, M.; Mahdioun, S.H.; Jaryani, P.; Yazdani, M. A review of technological and clinical aspects of robot-aided rehabilitation of upper-extremity after stroke. Disabil. Rehabil. Assist. Technol. 2016, 11, 263–280. [Google Scholar] [CrossRef] [PubMed]
- Khan, S.B.; Rahman, M.H.; Haque, M.O.; Rahman, E. Effectiveness of Task Oriented Physiotherapy Along with Conventional Physiotherapy for Patients with Stroke. IJNPT 2019, 5, 37–41. [Google Scholar] [CrossRef]
- Le Guiet, J.L.; Le Claire, G. Pendant combien de temps doit-on pratiquer la rééducation du membre supérieur chez l’hémiplégique? Ann. Réadaptation Méd. Phys. 1998, 41, 107–113. [Google Scholar] [CrossRef]
- Prange, G.B.; Jannink, M.J.A.; Groothuis-Oudshoorn, C.G.M.; Hermens, H.J.; Ijzerman, M.J. Systematic review of the effect of robot-aided therapy on recovery of the hemiparetic arm after stroke. JRRD 2006, 43, 171–184. [Google Scholar] [CrossRef]
- Gassert, R.; Dietz, V. Rehabilitation robots for the treatment of sensorimotor deficits: A neurophysiological perspective. JNER 2018, 15, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Garcia, D.A.; Arredondo, R.; Morris, M.; Tosunoglu, S. A review of rehabilitation strategies for stroke recovery. In Proceedings of the ASME Early Career Technical Conference, Atlanta, Georgia, USA, 2–3 November 2012; Volume 11, pp. 24–31. [Google Scholar]
- Oña, E.D.; Cano-de La Cuerda, R.; Sánchez-Herrera, P.; Balaguer, C.; Jardón, A. A review of robotics in neurorehabilitation: Towards an automated process for upper limb. J. Healthc. Eng. 2018, 2018. [Google Scholar] [CrossRef]
- Maciejasz, P.; Eschweiler, J.; Gerlach-Hahn, K.; Jansen-Troy, A.; Leonhardt, S. A survey on robotic devices for upper limb rehabilitation. JNER 2014, 11, 1–29. [Google Scholar] [CrossRef]
- Qassim, H.M.; Wan Hasan, W.Z. A Review on Upper Limb Rehabilitation Robots. Appl. Sci 2020, 10, 6976. [Google Scholar] [CrossRef]
- Nef, T.; Riener, R. ARMin-design of a novel arm rehabilitation robot. In 9th ICORR; IEEE: Chicago, IL, USA, 2005; pp. 57–60. [Google Scholar] [CrossRef]
- Reinkensmeyer, D.J.; Kahn, L.E.; Averbuch, M.; McKenna-Cole, A.; Schmit, B.D.; Rymer, W.Z. Understanding and treating arm movement impairment after chronic brain injury: Progress with the ARM guide. JRRD 2000, 37, 653–662. [Google Scholar]
- Lum, P.S.; Burgar, C.G.; Van der Loos, M.; Shor, P.C.; Majmundar, M.; Yap, R. MIME robotic device for upper-limb neurorehabilitation in subacute stroke subjects: A follow-up study. J. Rehabil. Res. Dev. 2006, 43, 631. [Google Scholar] [CrossRef]
- Xiong, H.; Diao, X. A review of cable-driven rehabilitation devices. Disabil. Rehabil. Assist. Technol. 2020, 15, 885–897. [Google Scholar] [CrossRef]
- Qian, S.; Zi, B.; Shang, W.W.; Xu, Q.S. A Review on Cable-driven Parallel Robots. Chin. J. Mech. Eng. 2018, 31, 66. [Google Scholar] [CrossRef]
- Scalera, L.; Gasparetto, A.; Zanotto, D. Design and experimental validation of a 3-dof underactuated pendulum-like robot. IEEE ASME Trans. Mechatron. 2019, 25, 217–228. [Google Scholar] [CrossRef]
- Ji, H.; Shang, W.; Cong, S. Adaptive Control of a Spatial 3-Degree-of-Freedom Cable-Driven Parallel Robot with Kinematic and Dynamic Uncertainties. In Proceedings of the 2020 5th International Conference on Advanced Robotics and Mechatronics (ICARM 2020), Shenzhen, China, 14 September 2020; pp. 142–147. [Google Scholar] [CrossRef]
- Mottola, G.; Gosselin, C.; Carricato, M. Dynamically-feasible elliptical trajectories for fully constrained 3-DOF Cable-suspended parallel robots. In Cable-Driven Parallel Robots; Springer: Cham, Switzerland, 2018; pp. 219–230. [Google Scholar] [CrossRef]
- Xiang, S.; Gao, H.; Liu, Z.; Gosselin, C. Dynamic transition trajectory planning of three-DOF cable-suspended parallel robots via linear time-varying MPC. Mech. Mach. Theory 2020, 146, 103715. [Google Scholar] [CrossRef]
- Gagliardini, L.; Caro, S.; Gouttefarde, M.; Wenger, P.; Girin, A. Optimal design of cable-driven parallel robots for large industrial structures. In Proceedings of the ICRA 2014, Hong Kong, China, 31 May–7 June 2014; pp. 5744–5749. [Google Scholar] [CrossRef]
- Hussein, H.; Santos, J.C.; Gouttefarde, M. Geometric Optimization of a Large Scale CDPR Operating on a Building Façade. In Proceedings of the IROS 2018, Madrid, Spain, 1–5 October 2018; pp. 5117–5124. [Google Scholar] [CrossRef]
- Fattah, A.; Agrawal, S.K. On the Design of Cable-Suspended Planar Parallel Robots. J. Mech. Des. 2005, 127, 1021–1028. [Google Scholar] [CrossRef]
- Li, Y.; Xu, Q. GA-Based Multi-Objective Optimal Design of a Planar 3-DOF Cable-Driven Parallel Manipulator. In Proceedings of the IEEE Robio 2006, Kunming, China, 17–20 December 2006; pp. 1360–1365. [Google Scholar] [CrossRef]
- Chaparro-Rico, B.D.M.; Cafolla, D.; Castillo-Castaneda, E.; Ceccarelli, M. Design of arm exercises for rehabilitation assistance. J. Eng. Res. 2020, 8, 204–218. [Google Scholar] [CrossRef]
- Kawamura, S.; Ito, K. A new type of master robot for teleoperation using a radial wire drive system. In Proceedings of the IROS 1993, Yokohama, Japan, 26–30 July 1993; pp. 55–60. [Google Scholar] [CrossRef]
- Lee, J.H.; Eom, K.S.; Suh, I.I. Design of a new 6-DOF parallel haptic device. In Proceedings of the ICRA 2001, Seoul, Korea, 21–26 May 2001; Volume 1, pp. 886–891. [Google Scholar] [CrossRef]
- Ma, O.; Angeles, J. Optimum architecture design of platform manipulators. In Proceedings of the 5th ICARR ’Robots in Unstructured Environments, Atlanta, GA, USA, 2–6 May 1993; Volume 2, pp. 1130–1135. [Google Scholar] [CrossRef]
- Khan, S.; Andersson, K.; Wikander, J. Jacobian Matrix Normalization—A Comparison of Different Approaches in the Context of Multi-Objective Optimization of 6-DOF Haptic Devices. J. Intell. Robot. Syst. 2015, 79, 87–100. [Google Scholar] [CrossRef]
- Gunantara, N. A review of multi-objective optimization: Methods and its applications. Cogent Eng. 2018, 5, 1502242. [Google Scholar] [CrossRef]
- Jia, J.; Fischer, G.W.; Dyer, J.S. Attribute weighting methods and decision quality in the presence of response error: A simulation study. J. Behav. Decis. Mak. 1998, 11, 85–105. [Google Scholar] [CrossRef]
- Dawes, R.M.; Corrigan, B. Linear models in decision making. Psychol. Bull. 1974, 81, 95. [Google Scholar] [CrossRef]
- Einhorn, H.J.; McCoach, W. A simple multiattribute utility procedure for evaluation. Behav. Sci. 1977, 22, 270–282. [Google Scholar] [CrossRef]
- Ferdaws, E.; El Golli, H.; Chaker, A.; Laribi, M.A.; Sandoval, J.; Bennour, S.; Mlika, A.; Romdhane, L.; Zeghloul, S. Design Optimization and Dynamic Control of a 3-d.o.f. Planar Cable-Driven Parallel Robot for Upper Limb Rehabilitation. In Proceedings of the New Trends in Medical and Service Robotics MESROB, Virtual Conference, 7–9 June 2021. [Google Scholar]
- Eberhart, R.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the Sixth International Symposium on Micro Machine and Human Science MHS’95, Nagoya, Japan, 4–6 October 1995; pp. 39–43. [Google Scholar] [CrossRef]
- Sands, T. Optimization provenance of whiplash compensation for flexible space robotics. Aerospace 2019, 6, 93. [Google Scholar] [CrossRef]
- Shorman, S.M.; Pitchay, S.A. Significance of parameters in genetic algorithm, the strengths, its limitations and challenges in image recovery. ARPN J. Eng. Appl. Sci. 2006, 10, 585–593. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Mobile platform weight [kg] | 0.5 |
| Pulley radius [mm] | 37 |
| Cable radius [mm] | 0.3 |
| [N] | 0.5 |
| [N] | 15 |
| [°] | 2 |
| 0.45 | |
| 0.1 | |
| Population size | 100 |
| Parameter | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Lower bounds [m] | −0.375 | −0.385 | 0 | −0.385 | 0 | 0 | −0.375 | 0 | 0.1 |
| Upper bounds [m] | 0 | 0 | 0.375 | 0 | 0.375 | 0.385 | 0 | 0.385 | 0.15 |
| Parameter | Value |
|---|---|
| Optimal design vector | |
| Objective function | 0.35 |
| Cable tension criterion | 0.124 |
| Elastic stiffness criterion | 0.588 |
| Dexterity criterion | 0.3 |
| Parameter | Equation | Value | |
|---|---|---|---|
| Mean absolute error | Position [mm] | 10.63 | |
| Orientation [°] | 1.64 | ||
| Root-mean-square error | Position [mm] | 13 | |
| Orientation [°] | 1.95 | ||
| Error standard deviation | Position [mm] | 12.57 | |
| Orientation [°] | 1.06 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ennaiem, F.; Chaker, A.; Laribi, M.A.; Sandoval, J.; Bennour, S.; Mlika, A.; Romdhane, L.; Zeghloul, S. Task-Based Design Approach: Development of a Planar Cable-Driven Parallel Robot for Upper Limb Rehabilitation. Appl. Sci. 2021, 11, 5635. https://doi.org/10.3390/app11125635
Ennaiem F, Chaker A, Laribi MA, Sandoval J, Bennour S, Mlika A, Romdhane L, Zeghloul S. Task-Based Design Approach: Development of a Planar Cable-Driven Parallel Robot for Upper Limb Rehabilitation. Applied Sciences. 2021; 11(12):5635. https://doi.org/10.3390/app11125635
Chicago/Turabian StyleEnnaiem, Ferdaws, Abdelbadiâ Chaker, Med Amine Laribi, Juan Sandoval, Sami Bennour, Abdelfattah Mlika, Lotfi Romdhane, and Saïd Zeghloul. 2021. "Task-Based Design Approach: Development of a Planar Cable-Driven Parallel Robot for Upper Limb Rehabilitation" Applied Sciences 11, no. 12: 5635. https://doi.org/10.3390/app11125635
APA StyleEnnaiem, F., Chaker, A., Laribi, M. A., Sandoval, J., Bennour, S., Mlika, A., Romdhane, L., & Zeghloul, S. (2021). Task-Based Design Approach: Development of a Planar Cable-Driven Parallel Robot for Upper Limb Rehabilitation. Applied Sciences, 11(12), 5635. https://doi.org/10.3390/app11125635