
Conjoining Wymore’s Systems Theoretic Framework and the DEVS Modeling Formalism: Toward Scientific Foundations for MBSE




Abstract
:Featured Application
Abstract
1. Introduction
2. Methods
3. Results
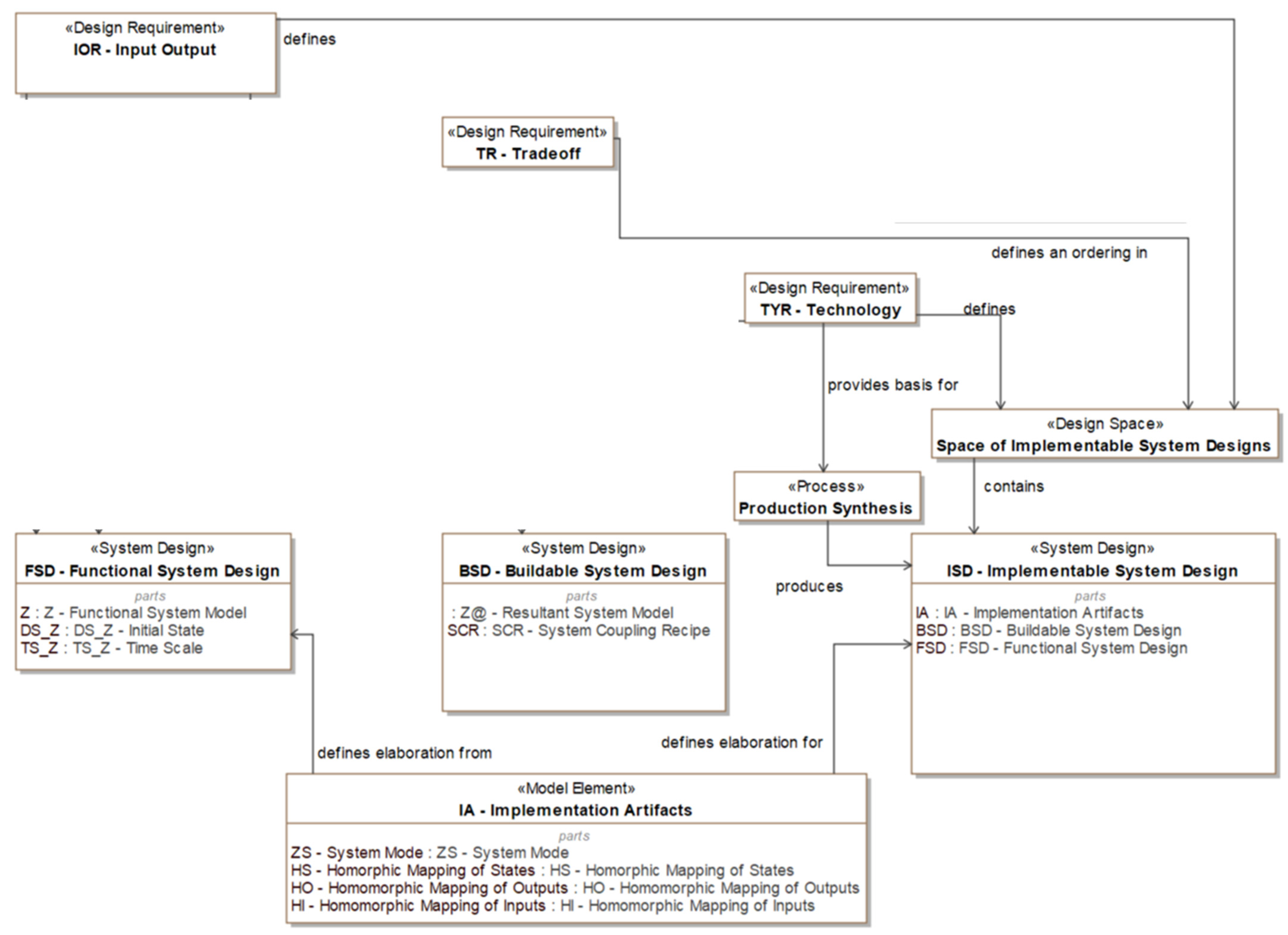
3.1. A Systematic Description of the T3SD Metamodel
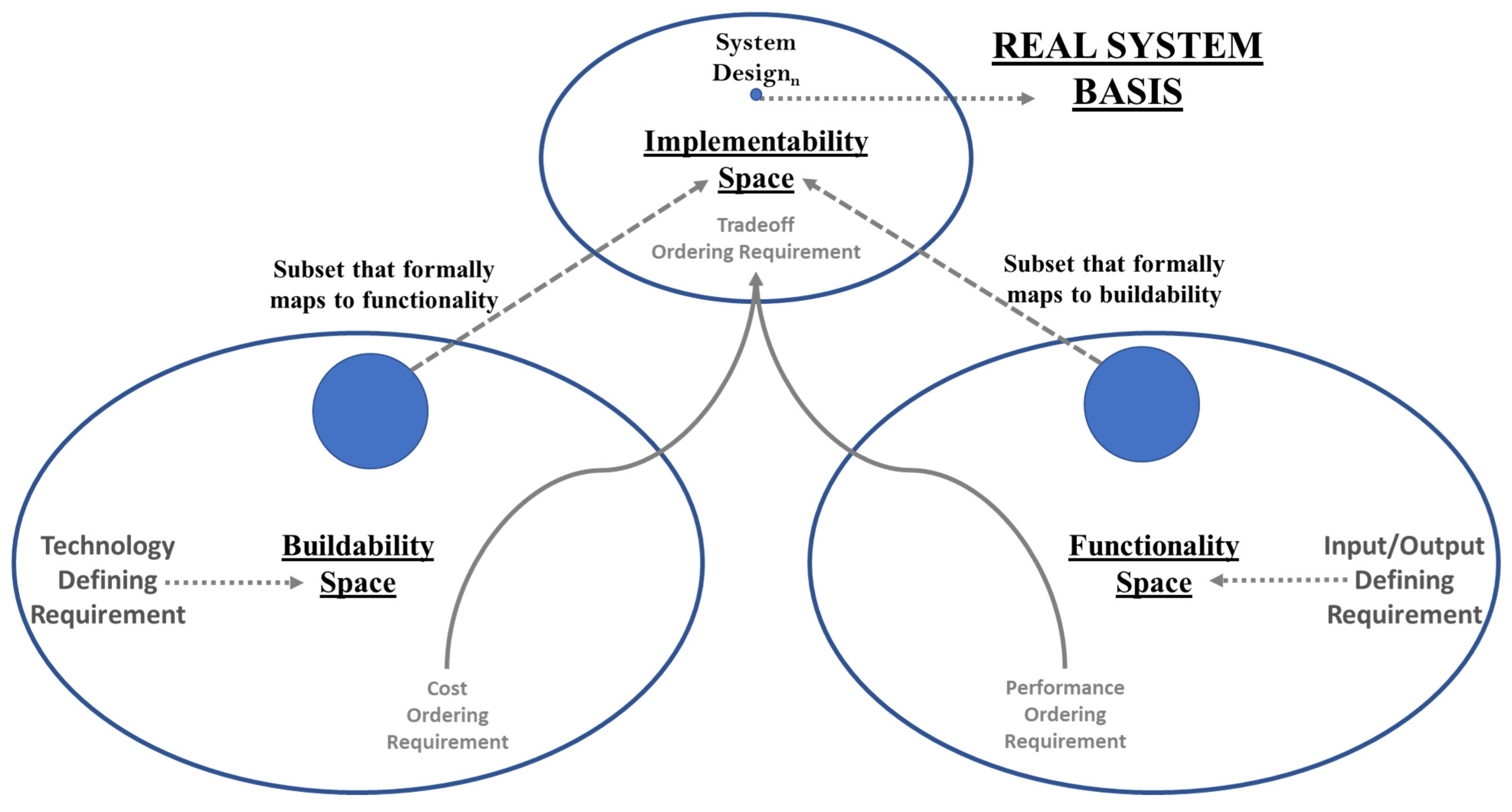
3.1.1. The Problem Space (Wymore’s System Design Requirement)
3.1.2. The Functionality Perspective (Wymore’s Functional Cotyledon)
3.1.3. The Buildability Perspective (Wymore’s Buildability Cotyledon)
3.1.4. The Implementability Perspective (Wymore’s Implementability Cotyledon)
3.1.5. Illustration of T3SD Concepts
3.2. A Brief Review of DEVS and Associated Formalism
3.2.1. Overview of the DEVS
3.2.2. Hierarchy of System Specifications and Associated Morphisms
- the validity of representation of a real system by a model,
- the validity of a simplified model relative to a more complex model from which it is derived,
- the validity of a system description at one level of specification relative to a system description at a higher or lower level, and
- the correctness of a simulator with respect to a model that it is simulating.
3.3. Pairing T3SD with DEVS
3.3.1. DEVS-Based Experimental Frame for Simulation of T3SD
3.3.2. T3SD Association with DEVS
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Complete Metamodel of Wymore’s T3SD

Appendix B. Core Equations for T3SD
Appendix C. Cross-Walk between Metamodel and Equations of T3SD

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronym | Meaning | Associated Equation(s) |
|---|---|---|
| FSD | Buildable system design | Equations (A3) and (A4) |
| CR | Cost requirement | Equation (A8) |
| DSZ | Initial state | Equation (A2) |
| FSD | Functional system design | Equations (A1) and (A2) |
| HI | Homomorphic mapping of inputs | Equations (A5)–(A7) |
| HO | Homomorphic mapping of outputs | Equations (A5)–(A7) |
| HS | Homomorphic mapping of states | Equations (A5)–(A7) |
| IA | Implementation artifacts Enables measured elaboration through homomorphic mapping | Equations (A5)–(A7) |
| IOR | Input/output requirement | Equations (A8) and (A9) |
| ISD | Implementable system design | Equations (A5)–(A7) |
| IZ | Set of inputs | Equation (A1) |
| NZ | Next state function, maps inputs to states | Equation (A1) |
| OZ | Set of outputs | Equation (A1) |
| PR | Performance requirement | Equation (A8) |
| RZ | Readout function, maps outputs to states | |
| SCR | System coupling recipe Coupling of system components | Equations (A3) and (A4) |
| STR | System test requirement | Equation (A8) |
| SZ | Set of states | Equation (A1) |
| TSZ | Discrete timescale | Equation (A2) |
| TYR | Technology requirement | Equation (A8) |
| Z | Minimum system model | Equations (A1) and (A2) |
| ZS | System mode, component, or subsystem (Used to represent system modes throughout the article) | Equations (A5)–(A7) |
| Z@ | Resultant system model from coupling of components | Equations (A3) and (A4) |
Appendix D. Introduction to Discrete Event System Specification (DEVS)
- X: all the ports of entry;
- Y: the set of output ports;
- S: all the states of the system;
- ta: the function of advancing the time (or lifetime of a state);
- δint: the internal transition function. It makes it possible to go from a state s1 at time t1 to a state s2 at time t2 as long as no external event occurs during the life time of state ta(s1);
- δext: the external transition function. It specifies the change of state (transition from state s1 to state s2) when an external event occurs (x) before ta (s1) has elapsed; Q is the set of states such that {(e, s) | s in S, 0 ≤ e ≤ ta (s)}; e is the time spent in the state.
- λ: the output function;
- the set of models that compose it, D,
- all the input ports that will receive the external events X,
- all the output ports that will emit the Y events,
- Couplings to input ports and output ports of the models that make up the coupled model.
- N has the following structure:
- X is the set of input ports and input values,
- Y is the set of output ports and output values,
- S is the set of partial states of the system,
- ta: is the function of advancing time,
- δint: is the internal transition function,
- δext: is the external transition function where Xb is the set of input bags belonging to X, Q is the set of total states, Q = {(s, e) | s in S, 0 ≤ e ≤ ta (s)}, where e is the elapsed time since the last transition to state, s
- δcon: the confluent function,
- λ: the output function
References
- INCOSE. INCOSE System Egineering Vision 2025 July, 2014. Available online: https://www.incose.org/docs/default-source/aboutse/se-vision-2025.pdf?sfvrsn=4&sfvrsn=4 (accessed on 12 November 2020).
- Henderson, K.; Salado, A. Value and benefits of model-based systems engineering (MBSE): Evidence from the literature. Syst. Eng. 2021, 24, 51–66. [Google Scholar] [CrossRef]
- Chami, M.; Bruel, J.-M. A survey on MBSE adoption challenges. In Proceedings of the INCOSE EMEA Sector Systems Engineering Conference (INCOSE EMEASEC 2018), Berlin, Germany, 5–7 November 2018. [Google Scholar]
- Salado, A.; Wach, P. Interpretation Discrepancies of SysML State Machine: An Initial Investigation. In Proceedings of the 18th Annual Conference on Systems Engineering Research (CSER), Redondo Beach, CA, USA, 8–10 October 2020. [Google Scholar]
- Zeigler, B.P.; Mittal, S.; Traore, M.K. MBSE with/out Simulation: State of the Art and Way Forward. Systems 2018, 6, 40. [Google Scholar] [CrossRef] [Green Version]
- von Bertalanffy, L. General Systems Theory—Foundations, Development, Applications; George Braziller, Inc.: New York, NY, USA, 1969. [Google Scholar]
- Wiener, N. Cybernetics, or Communication and Control in the Animal and the Machine. N. Y. Ffiley 1948, 23, 1. [Google Scholar]
- Mesarovic, M.; Takahara, Y. General Systems Theory: Mathematical Foundations; Academic Press: London, UK, 1975. [Google Scholar]
- Mesarovic, M.; Takahara, Y. Abstract Systems Theory; Springer: New York, NY, USA, 1989. [Google Scholar]
- Zeigler, B.P.; Muzy, A.; Kofman, E. Theory of Modeling and Simulation: Discrete Event & Interative System Computational Foundations; Elsevier Inc.: London, UK, 2019. [Google Scholar]
- Wymore, A.W. A Mathematical Theory of Systems Engineering—The Elements; John Wiley and Sons Inc.: New York, NY, USA, 1967. [Google Scholar]
- INCOSE. Future of Systems Engineering (FuSE). Available online: https://www.incose.org/about-systems-engineering/fuse (accessed on 9 June 2020).
- Rousseau, D. The Theoretical Foundation(s) for Systems Engineering? Response to Yearworth. Syst. Res. Behav. Sci. 2020, 37, 188–191. [Google Scholar] [CrossRef]
- NSF. Workshop: Investigation of the Theoretical Foundations in Systems Engineering. Available online: https://www.nsf.gov/awardsearch/showAward?AWD_ID=1548480 (accessed on 9 June 2020).
- NSF. Workshop: The Science of Systems Engineering. Available online: https://nsf.gov/awardsearch/showAward?AWD_ID=1447031 (accessed on 9 June 2020).
- Hammami, O.; Edmonson, W. THEFOSE—Theoretical Foundations of System Engineering: A first feedback. In Proceedings of the 2015 IEEE International Symposium on Systems Engineering (ISSE), Rome, Italy, 28–30 September 2015; pp. 370–374. [Google Scholar]
- Collopy, P.D. Systems engineering theory: What needs to be done. In Proceedings of the 2015 Annual IEEE Systems Conference (SysCon) Proceedings, Vancouver, BC, Canada, 13–16 April 2015; pp. 536–541. [Google Scholar]
- Bjorkman, E.A.; Sarkani, S.; Mazzuchi, T.A. Using model-based systems engineering as a framework for improving test and evaluation activities. Syst. Eng. 2013, 16, 346–362. [Google Scholar] [CrossRef]
- Mabrok, M.; Ryan, M. Category Theory as a Formal Mathematical Foundation for Model-Based Systems Engineering. Appl. Math. Inf. Sci. 2017, 11, 43–51. [Google Scholar] [CrossRef]
- Wymore, A.W. Model-Based Systems Engineering; CRC Press LLC: Boca Raton, FL, USA, 1993; p. 33431. [Google Scholar]
- Wymore, A.W. Systems Movement: Autobiographical Retrospectives. Int. J. Gen. Syst. 2004, 33, 593–610. [Google Scholar] [CrossRef]
- Bahill, T. In Memoriam A. Wayne Wymore. Insight 2011, 14, 57–61. [Google Scholar] [CrossRef]
- Farid, A.M. An Engineering Systems Introduction to Axiomatic Design. In Axiomatic Design in Large Systems: Complex Products, Buildings and Manufacturing Systems; Farid, A.M., Suh, N.P., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 3–47. [Google Scholar] [CrossRef]
- Guenov, M.D.; Riaz, A.; Bile, Y.H.; Molina-Cristobal, A.; van Heerden, A.S.J. Computational framework for interactive architecting of complex systems. Syst. Eng. 2019. [Google Scholar] [CrossRef]
- McKelvin, J.M.; Jimenez, A. Specification and Design of Electrical Flight System Architectures with SysML. In Proceedings of the Infotech@Aerospace 2012, American Institute of Aeronautics and Astronautics, Garden Grove, CA, USA, 19–21 June 2012. [Google Scholar] [CrossRef] [Green Version]
- McKelvin, J.M.L.; Castillo, R.; Bonanne, K.; Bonnici, M.; Cox, B.; Gibson, C.; Leon, J.P.; Gomez-Mustafa, J.; Jimenez, A.; Madni, A.M. A Principled Approach to the Specification of System Architectures for Space Missions. In Proceedings of the AIAA SPACE 2015 Conference and Exposition, American Institute of Aeronautics and Astronautics, Pasadena, CA, USA, 31 August–2 September 2015. [Google Scholar] [CrossRef] [Green Version]
- Yin, Y.; Liu, S.; Chen, Y. Verification of SysML Activity Diagrams Using Hoare Logic and SOFL; Springer: Cham, Switzerland, 2018; pp. 71–88. [Google Scholar]
- Mabrok, M.A.; Elsayed, S.; Ryan, M.J. Mathematical framework for recursive model-based system design. Nonlinear Dyn. 2016, 84, 223–236. [Google Scholar] [CrossRef]
- NAFEMS; INCOSE. Systems Modeling & Simulation Working Group. Available online: https://www.nafems.org/community/working-groups/systems-modeling-simulation/ (accessed on 13 April 2021).
- WikiPedia. List of Unicode Characters. Available online: https://en.wikipedia.org/wiki/List_of_Unicode_characters (accessed on 13 February 2021).
- NoMagic. Cameo Systems Modeler. Available online: https://www.nomagic.com/products/cameo-systems-modeler (accessed on 13 February 2021).
- INCOSE. Guide for Writing Requirements; The International Council of Systems Engineering: San Diego, CA, USA, 2012; Available online: https://tcsd.instructure.com/files/99427/download?download_frd=1 (accessed on 13 January 2019).
- Salado, A.; Nilchiani, R.; Verma, D. A contribution to the scientific foundations of systems engineering: Solution spaces and requirements. J. Syst. Sci. Syst. Eng. 2017, 26, 549–589. [Google Scholar] [CrossRef]
- Salado, A.; Nilchiani, R. On the evolution of solution spaces triggered by emerging technologies. Procedia Comput. Sci. 2015, 44, 155–163. [Google Scholar] [CrossRef] [Green Version]
- Wymore, A.W. SYNERGY: The Design of a Systems Engineering System, I; Springer: Berlin/Heidelberg Germany, 1996; First online 2005; pp. 34–45. [Google Scholar]
- Zeigler, B.P. Closure under coupling: Concept, proofs, DEVS recent examples (wip). In Proceedings of the 4th ACM International Conference of Computing for Engineering and Sciences, Kuala Lumpur, Malaysia, 14–16 July 2018; p. 7. [Google Scholar]
- Wymore, A.W.; Bahill, A.T. When can we safely reuse systems, upgrade systems, or use COTS components? Syst. Eng. 2000, 3, 82–95. [Google Scholar] [CrossRef]
- Moore, E.F. Gedanken-experiments on Sequential Machines. In Automata Studies, Annals of Mathematical Studies; Princeton University Press: Princeton, NJ, USA, 1956; Volume 34, pp. 129–153. [Google Scholar]
- Chapman, W.L.; Bahill, A.T.; Wymore, A.W. Engineering Modeling and Design; CRC Press Inc.: Boca Raton, FL, USA, 1992. [Google Scholar]
- Daniels, J.; Werner, P.W.; Bahill, A.T. Quantitative methods for tradeoff analyses. Syst. Eng. 2001, 4, 190–212. [Google Scholar] [CrossRef]
- Zeigler, B.P. Theory of Modeling and Simulation; Wiley Interscience Co.: New York, NY, USA, 1976. [Google Scholar]
- Zeigler, B.P.; Sarjoughian, H. Guide to Modeling and Simulation of Systems of Systems, 2nd ed.; Springer International Publishing AG: Cham, Switzerland, 2017. [Google Scholar]
- Zeigler, B.P.; Zhang, L. Service-Oriented Model Engineering. In Concepts and Methodologies for Modeling and Simulation: A Tribute to Tuncer Ören; Yilmaz, L., Ed.; Springer International Publishing: Cham, Switzerland, 2015; pp. 19–44. [Google Scholar] [CrossRef]
- Ören, T.I.; Zeigler, B.P. System theoretic foundations of modeling and simulation: A historic perspective and the legacy of A Wayne Wymore. Simulation 2012, 88, 1033–1046. [Google Scholar] [CrossRef]
- Zeigler, B.P. Multifacetted Modelling and Discrete Event Simulation; Academic Press Inc (London) Ltd.: Orlando, FL, USA, 1984. [Google Scholar]
- Ören, T.I. Gest: General System Theory Implementor (A Combined Digital Simulation Language). Ph.D. Thesis, The University of Arizona, Tuscon, AZ, USA, 1971. [Google Scholar]
- Dogbey, F. GEST Translator within Knowledge-Based Modeling System Magest. Master’s Thesis, University of Ottawa: Ottawa, ON, Canada, 1985. [Google Scholar]
- Wymore, A.W. Systems Engineering Methodology for Interdisciplinary Teams; Wiley-Interscience: New York, NY, USA, 1976. [Google Scholar]
- Bisgambiglia, P.; Quesnel, G.; Rubrique, R. Les Journées DEVS Francophones: Théorie et Applications/Workshop RED Applications (JDF 2016) Compilation des Actes de la Conference JDF. Published online by JDF. 2016. Available online: http://www.cepadues.com/livres/jdf-2016-les-journees-devs-froncophones-theorie-applications-9782364935396.html (accessed on 25 May 2020).
- Zeigler, B.P.; Praehofer, H.; Kim, T.G. Theory of Modeling and Simulation: Discrete Event & Iterative System Computational Foundations; Academic Press: New York, NY, USA, 2000. [Google Scholar]
- Chow, A.C.; Zeigler, B.P.; Kim, D.H. Abstract simulator for the parallel DEVS formalism. In Proceedings of the Fifth Annual Conference on AI, and Planning in High Autonomy Systems, Gainesville, FL, USA, 7–9 December 1994; pp. 157–163. [Google Scholar]












| Level | Specification Name | What We Know at This Level | Example: An Engineered Flashlight System |
|---|---|---|---|
| 0 | I/O Frame | How to stimulate the system with inputs; what variables to measure and how to observe them over a time base; | The flashlight has inputs and outputs at external black-box level, input set of symbols representing pressing on (Pon) and pressing off (Poff); and the output set of symbols for light intensity (L2 and L0). |
| 1 | I/O Relation | Time-indexed data collected from a source system; consists of input/output pairs | For each input that the flashlight recognizes, the set of possible outputs that the flashlight can produce |
| 2 | I/O Function | Knowledge of initial state; given an initial state, every input stimulus produces a unique output. | Assuming knowledge of the flashlight’s initial state at the onset of its operational lifecycle, the unique output time segment response to each input time segment. |
| 3 | I/O System | How states are affected by inputs; given a state and an input what is the state after the input stimulus is over; what output event is generated by a state. | How the flashlight transits from state to state under input signals and generates output signals from the current state |
| 4 | Structured System | The I/O System state is described in terms of a cross-product of state sets, such as a point in a vector space. | The description of the flashlight transits from state to state under input signals in terms of a point in a real valued vector space as in a linear state-based system. |
| 5 | Multi-component System | The system is specified as composition of components whose outputs are directly linked to inputs of other components | A description of a flashlight’s I/O behavior in terms of components and their direct interaction in the manner of a cellular automaton (Game of Life). |
| 6 | Network of Systems | Components and how they are coupled together. The components can be specified at lower levels or can even be structure systems themselves—leading to hierarchical structure. | A description of a flashlight’s I/O behavior in terms of components, such as batteries and lightbulbs, and their interaction by spikes in voltage is at this level. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wach, P.; Zeigler, B.P.; Salado, A. Conjoining Wymore’s Systems Theoretic Framework and the DEVS Modeling Formalism: Toward Scientific Foundations for MBSE. Appl. Sci. 2021, 11, 4936. https://doi.org/10.3390/app11114936
Wach P, Zeigler BP, Salado A. Conjoining Wymore’s Systems Theoretic Framework and the DEVS Modeling Formalism: Toward Scientific Foundations for MBSE. Applied Sciences. 2021; 11(11):4936. https://doi.org/10.3390/app11114936
Chicago/Turabian StyleWach, Paul, Bernard P. Zeigler, and Alejandro Salado. 2021. "Conjoining Wymore’s Systems Theoretic Framework and the DEVS Modeling Formalism: Toward Scientific Foundations for MBSE" Applied Sciences 11, no. 11: 4936. https://doi.org/10.3390/app11114936
APA StyleWach, P., Zeigler, B. P., & Salado, A. (2021). Conjoining Wymore’s Systems Theoretic Framework and the DEVS Modeling Formalism: Toward Scientific Foundations for MBSE. Applied Sciences, 11(11), 4936. https://doi.org/10.3390/app11114936