Adaptive Control for a Biological Process under Input Saturation and Unknown Control Gain via Dead Zone Lyapunov Functions




{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- The modified tracking error converges to a compact set whose width is user-defined, so that it does not depend on the bounds of either external disturbances, model terms, system states, or model parameters. This is in contrast to common adaptive backstepping control designs (see in [12,15]) and also those that use the Nussbaum gain strategy (see in [14]) where the width of the convergence region of the modified tracking error depends on such kind of bounds.
- The convergence region of the tracking error is determined for the closed loop system under the formulated controller with the proposed auxiliary system.
2. Model Description, Reference Model and Control Goal
2.1. Model Description
2.2. Reference Model
2.3. Control Goal
3. Control Design and Stability Analysis
3.1. Controller Design
- a new auxiliary system of second order is proposed, whose input includes the control signal error , which is the difference between the constrained and the unconstrained control signals;
- a modified tracking error is defined as the sum of the regular tracking error and the state of the auxiliary system;
- the definition the states is based on the adaptive state backstepping method;
- dead zone radially unbounded quadratic forms are used instead of current quadratic forms; and
- a new treatment of the term is proposed, including a new parameterization of the unknown model parameters, and the formulation of a new auxiliary system.
3.2. Boundedness and Convergence Analysis
4. Simulation Example
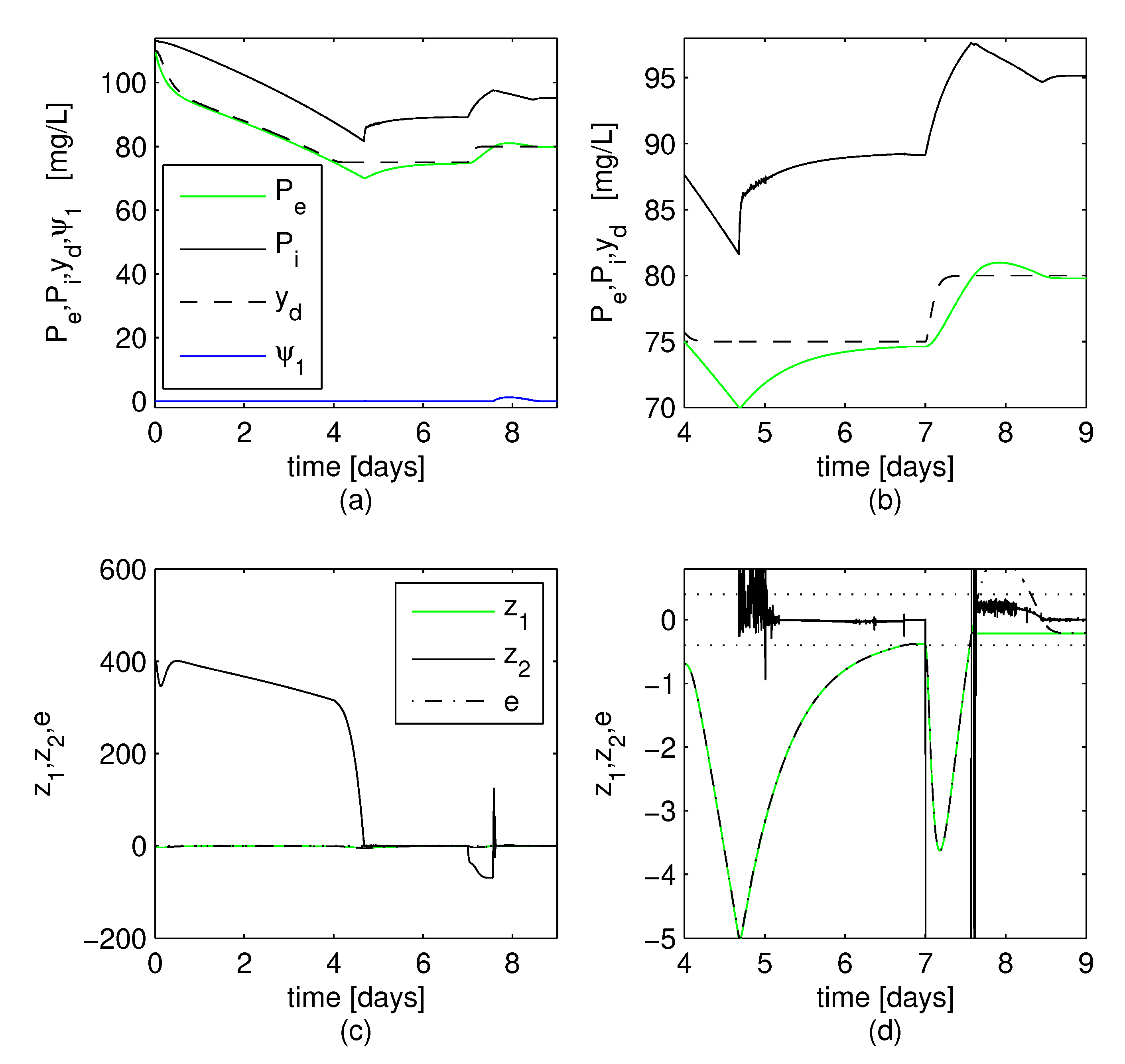
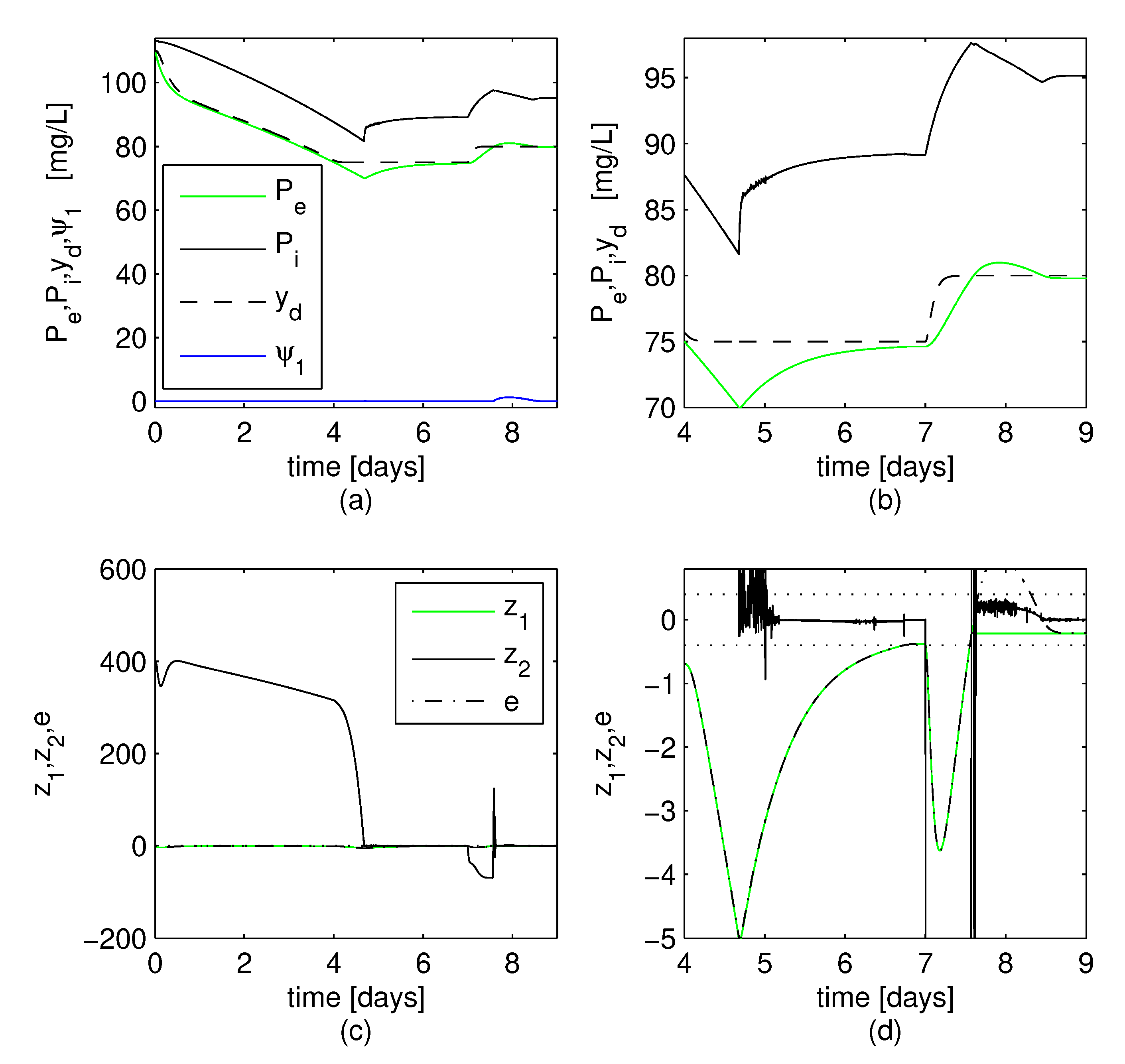
- the signal is near at initial time , it enters at days and it remains inside until days (Figure 1d).
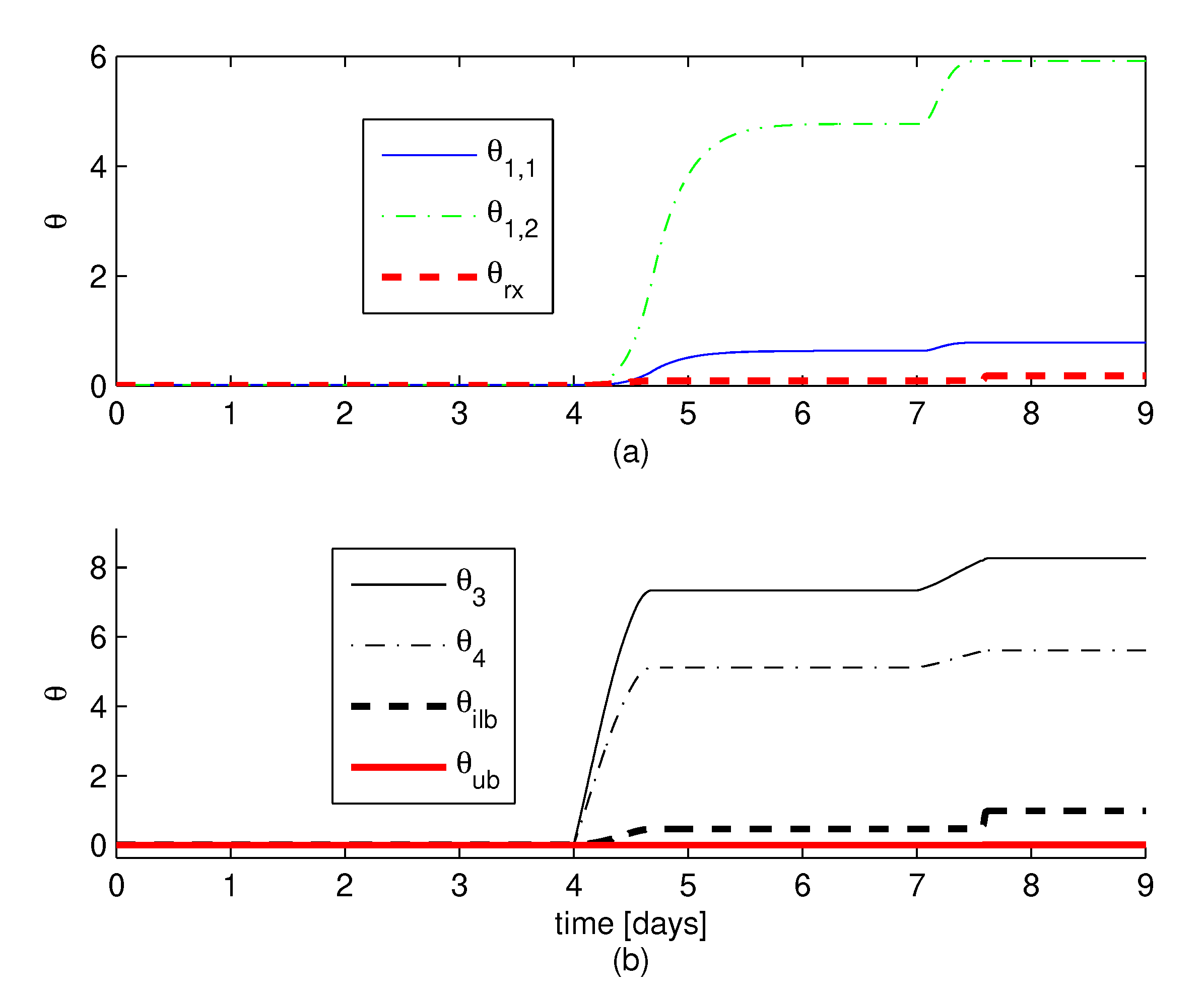
- the updated parameters remain bounded, and its change is not excessive; , change when , and remain constant otherwise (Figure 3).
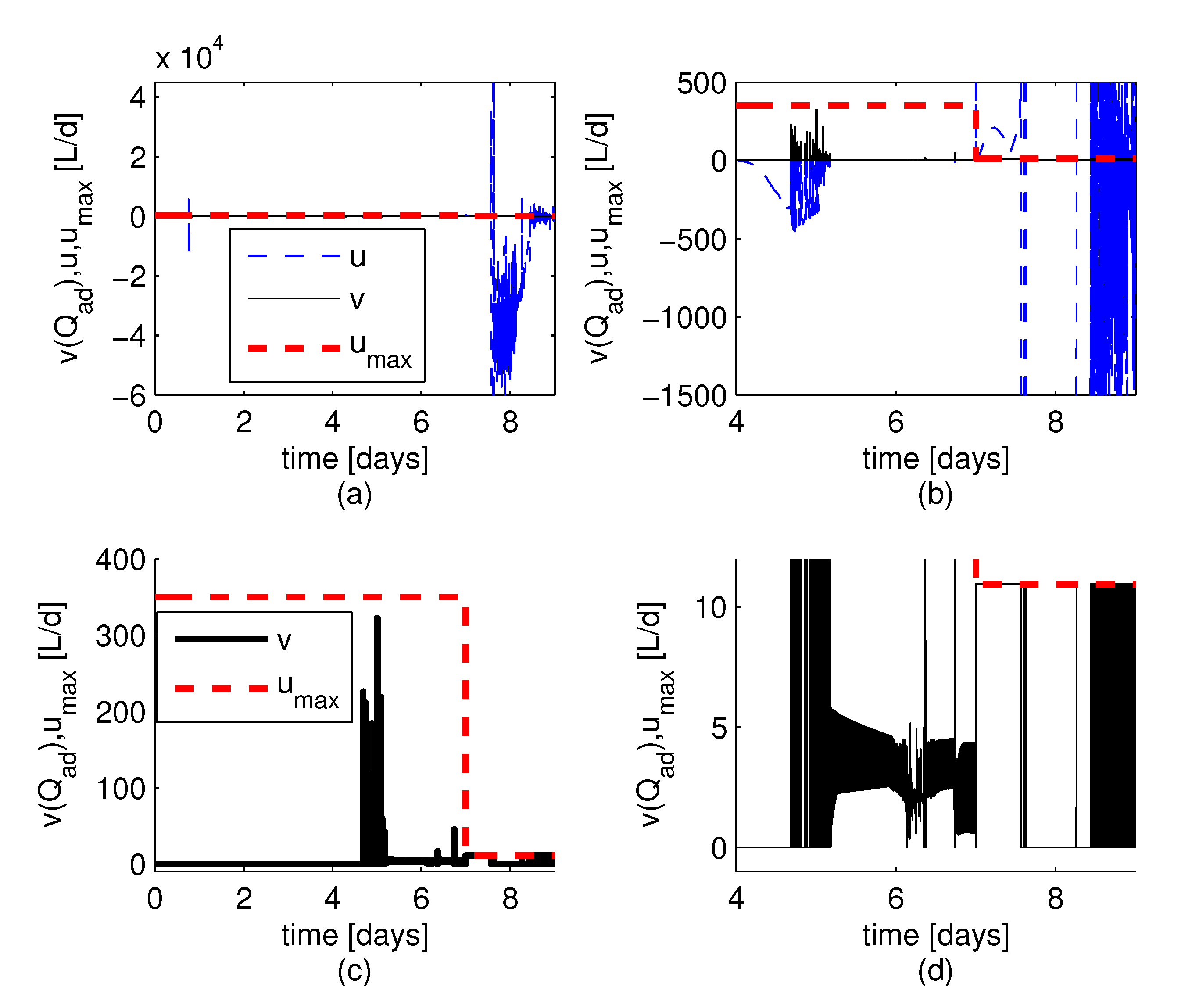
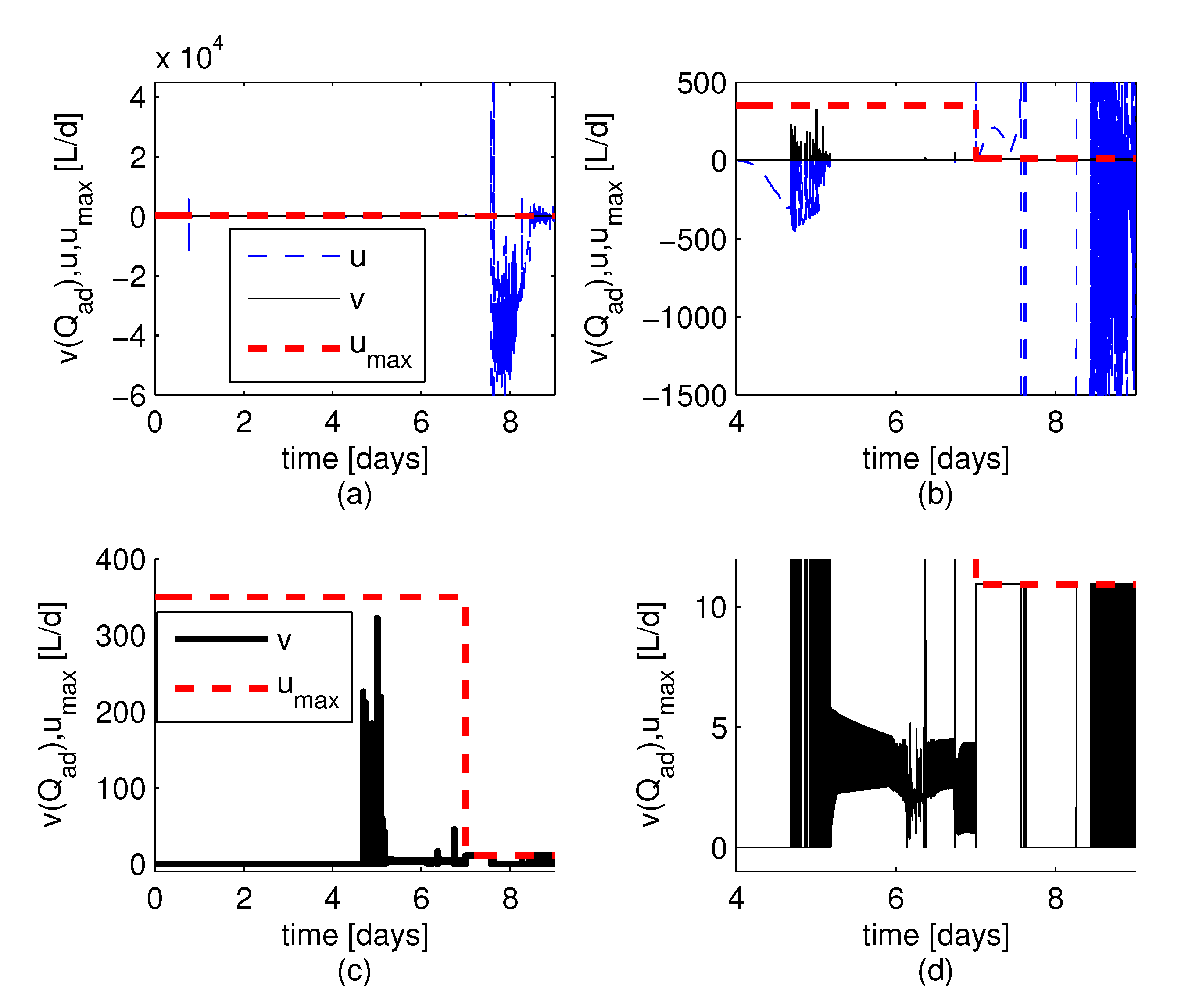
- input signal v: for days it exhibits reiterated saturation at its lower bound, with only one moment of saturation at its upper bound (at days approx); during other moments it exhibits changing behavior (Figure 2c,d).
- the signal is inside at days , it leaves, it enters at days approx. and it remains inside afterwards (Figure 1d).
- the updated parameters remain bounded, , are constant when , and the other updated parameters are constant when (Figure 3).
- input signal v: for days, it remains saturated at its upper bound; for days, it exhibits saturation at its lower bound with some few saturation at its upper bounds; for days, it exhibits reiterated saturation at both its upper and lower bounds (Figure 2c,d).
5. Conclusions
- It tackles the combined effect of constrained control input and unknown varying control gain with unknown bounds. To this end, a new auxiliary system is proposed.
- The modified tracking error asymptotically converges to a compact set whose width is user-defined and it does not depend on bounds of either external disturbances, model terms or parameters. Recall that in common robust backstepping designs, the tracking error converges to a compact set whose width depends on such kind of bounds, so that these bounds are required in order to obtain the expected width.
- the model coefficients, and upper and lower bounds of model terms are not required to be known, except ;
- the exact value of the reaction rate term is not required to be known;
- the control gain b is varying and unknown, although it can be expressed as , where is known and is unknown;
- discontinuous functions are not used in the control law, update laws and auxiliary system; instead, saturation type functions are used; and
- the boundedness of the updated parameters is ensured in the presence of input saturation, so that excessive parameter increase is avoided.
Author Contributions
Funding
Conflicts of Interest
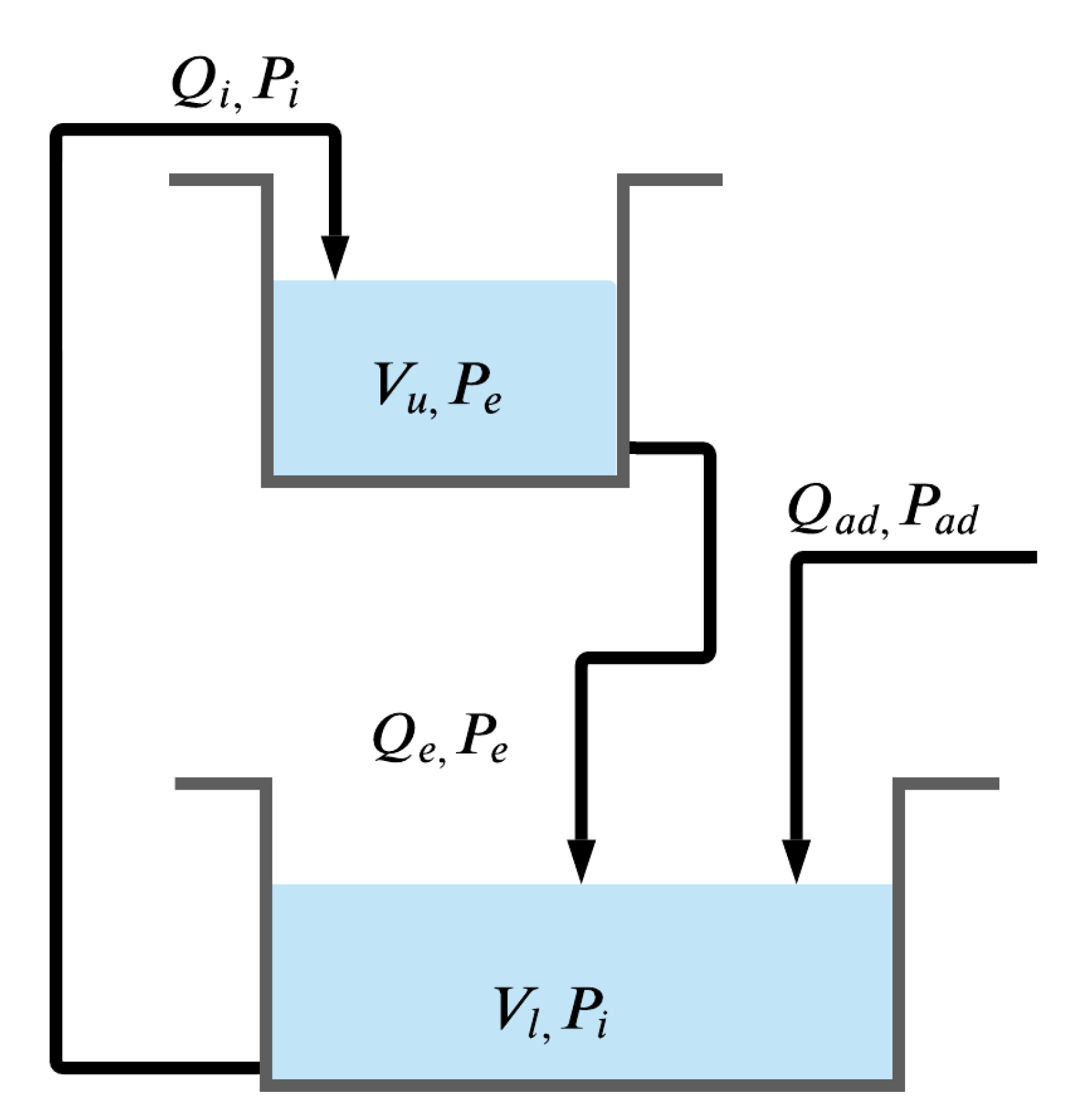
Appendix A. Hydroponic System and Formulation of the Mass Balance Model
- The upper CSTR corresponds to the nutrient solution in the cultivation beds. The nutrient concentration is denoted as , the water volume is denoted as , the rate of nutrient removal is denoted as , and the evapotranspiration rate is denoted as . Nutrient removal occurs via sorption and plant uptake. We assume that the water volume is constant.
- The lower CSTR corresponds to the nutrient solution in the mixing tank. The nutrient concentration is denoted as and the water volume is denoted as . The nutrient solution mixes with the incoming flow, which is in turn the flow leaving the upper CSTR. We assume that is varying because of water evaporation losses and varying nature of flow .

References
- Schaum, A.; Alvarez, J.; Garcia-Sandoval, J.P.; Gonzalez-Alvarez, V.M. On the dynamics and control of a class of continuous digesters. J. Process Control 2015, 34, 82–96. [Google Scholar] [CrossRef]
- Battista, H.D.; Jamilis, M.; Garelli, F. Global stabilisation of continuous bioreactors: Tools for analysis and design of feeding laws. Automatica 2018, 89, 340–348. [Google Scholar] [CrossRef]
- Battista, H.D.; Picó, J.; Picó-Marco, E. Nonlinear PI control of fed-batch processes for growth rate regulation. J. Process Control 2012, 22, 789–797. [Google Scholar] [CrossRef]
- Dalal, P.; Roy, S.; Chopda, V.; Gomes, J.; Rathore, A.S. Comparison and implementation of different control strategies for improving production of rHSA using Pichia pastoris. J. Biotechnol. 2019, 290, 33–43. [Google Scholar]
- Lara-Cisneros, G.; Femat, R.; Dochain, D. An extremum seeking approach via variable-structure control for fed-batch bioreactors with uncertain growth rate. J. Process Control 2014, 24, 663–671. [Google Scholar] [CrossRef]
- Nuñez, S.; Garelli, F.; Battista, H.D. Closed-loop growth-rate regulation in fed-batch dual-substrate processes with additive kinetics based on biomass concentration measurement. J. Process Control 2016, 44, 14–22. [Google Scholar] [CrossRef]
- Petre, E.; Selisteanu, D.; Sendrescu, D. Adaptive and robust-adaptive control strategies for anaerobic wastewater treatment bioprocesses. Chem. Eng. J. 2013, 217, 363–378. [Google Scholar] [CrossRef]
- Bastin, G.; Dochain, D. On-Line Estimation and Adaptive Control of Bioreactors; Elsevier: Amsterdam, The Netherlands, 1990. [Google Scholar]
- Méndez-Acosta, H.O.; Campos-Delgado, D.U.; Femat, R.; González-Alvarez, V. A robust feedforward/feedback control for an anaerobic digester. Comput. Chem. Eng. 2005, 29, 1613–1623. [Google Scholar] [CrossRef]
- Polycarpou, M.; Farrell, J.; Sharma, M. On-line approximation control of uncertain nonlinear systems: Issues with control input saturation. In Proceedings of the American Control Conference, Denver, CO, USA, 4–6 June 2003; pp. 543–548. [Google Scholar]
- Gao, S.; Ning, B.; Dong, H. Fuzzy dynamic surface control for uncertain nonlinear systems under input saturation via truncated adaptation approach. Fuzzy Set. Syst. 2016, 290, 100–117. [Google Scholar] [CrossRef]
- Min, H.; Xu, S.; Ma, Q.; Zhang, B.; Zhang, Z. Composite-observer-based output-feedback control for nonlinear time-delay systems with input saturation and its application. IEEE Trans. Ind. Electron. 2018, 65, 5856–5863. [Google Scholar] [CrossRef]
- Lin, D.; Wang, X.; Yao, Y. Fuzzy neural adaptive tracking control of unknown chaotic systems with input saturation. Nonlinear Dynam. 2012, 67, 2889–2897. [Google Scholar] [CrossRef]
- Askari, M.R.; Shahrokhi, M.; Talkhoncheh, M.K. Observer-based adaptive fuzzy controller for nonlinear systems with unknown control directions and input saturation. Fuzzy Set. Syst. 2017, 314, 24–45. [Google Scholar] [CrossRef]
- Nassira, Z.; Mohamed, C.; Essounbouli, N. Adaptive neural-network output feedback control design for uncertain CSTR system with input saturation. In Proceedings of the 2018 International Conference on Electrical Sciences and Technologies, CISTEM, Algiers, Algeria, 29–31 October 2019. [Google Scholar]
- Astrom, K.J.; Wittenmark, B. Adaptive Control; Addison-Wesley Publising Company: Reading, MA, USA, 1995. [Google Scholar]
- Slotine, J.; Li, W. Applied Nonlinear Control; Prentice-Hall Inc.: Englewood Cliffs, NJ, USA, 1991. [Google Scholar]
- Polycarpou, M.M.; Ioannou, P.A. On the existence and uniqueness of solutions in adaptive control systems. IEEE Trans. Automat. Control 1993, 38, 474–479. [Google Scholar] [CrossRef]
- Polycarpou, M.M.; Ioannou, P.A. A robust adaptive nonlinear control design. Automatica 1996, 32, 423–427. [Google Scholar] [CrossRef]
- Rincon, A.; Piarpuzán, D.; Angulo, F. A new adaptive controller for bio-reactors with unknown kinetics and biomass concentration: Guarantees for the boundedness and convergence properties. Math. Comput. Simulat. 2015, 112, 1–13. [Google Scholar] [CrossRef]
- Zhou, J.; Zhang, C.; Wen, C. Robust adaptive output control of uncertain nonlinear plants with unknown backlash nonlinearity. IEEE T. Automat. Control 2007, 52, 503–509. [Google Scholar] [CrossRef]
- Koo, K. Stable adaptive fuzzy controller with time-varying dead-zone. Fuzzy Set. Syst. 2001, 121, 161–168. [Google Scholar] [CrossRef]
- Wang, X.; Su, C.; Hong, H. Robust adaptive control of a class of nonlinear systems with unknown dead-zone. Automatica 2004, 40, 407–413. [Google Scholar] [CrossRef]
- Su, C.; Feng, Y.; Hong, H.; Chen, X. Adaptive control of system involving complex hysteretic nonlinearities: A generalised Prandtl–Ishlinskii modelling approach. Int. J. Control 2009, 82, 1786–1793. [Google Scholar] [CrossRef]
- Wang, Q.; Su, C. Robust adaptive control of a class of nonlinear systems including actuator hysteresis with Prandtl–Ishlinskii presentations. Automatica 2006, 42, 859–867. [Google Scholar] [CrossRef]
- Ranjbar, E.; Yaghubi, M.; Suratgar, A.A. Robust adaptive sliding mode control of a MEMS tunable capacitor based on dead-zone method. Automatika 2020, 61, 587–601. [Google Scholar] [CrossRef]
- Ioannou, P.; Sun, J. Robust Adaptive Control; Prentice-Hall PTR: Upper Saddle River, NJ, USA, 1996. [Google Scholar]
- Lee, J.Y.; Rahman, A.; Azam, H.; Kim, H.S.; Kwon, M.J. Characterizing nutrient uptake kinetics for efficient crop production during Solanum lycopersicum var. cerasiforme Alef. growth in a closed indoor hydroponic system. PLoS ONE 2017, 12, e0177041. [Google Scholar] [CrossRef] [PubMed]
- Mutolsky, H.; Christopoulos, A. Fitting Models to Biological Data Using Linear and Nonlinear Regression; GraphPad Software: San Diego, CA, USA, 2003. [Google Scholar]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rincón, A.; Hoyos, F.E.; Candelo-Becerra, J.E. Adaptive Control for a Biological Process under Input Saturation and Unknown Control Gain via Dead Zone Lyapunov Functions. Appl. Sci. 2021, 11, 251. https://doi.org/10.3390/app11010251
Rincón A, Hoyos FE, Candelo-Becerra JE. Adaptive Control for a Biological Process under Input Saturation and Unknown Control Gain via Dead Zone Lyapunov Functions. Applied Sciences. 2021; 11(1):251. https://doi.org/10.3390/app11010251
Chicago/Turabian StyleRincón, Alejandro, Fredy E. Hoyos, and John E. Candelo-Becerra. 2021. "Adaptive Control for a Biological Process under Input Saturation and Unknown Control Gain via Dead Zone Lyapunov Functions" Applied Sciences 11, no. 1: 251. https://doi.org/10.3390/app11010251
APA StyleRincón, A., Hoyos, F. E., & Candelo-Becerra, J. E. (2021). Adaptive Control for a Biological Process under Input Saturation and Unknown Control Gain via Dead Zone Lyapunov Functions. Applied Sciences, 11(1), 251. https://doi.org/10.3390/app11010251