1. Introduction
State estimation (SE) is an important component of an energy management system (EMS), since it allows the system operator to control and monitor an electric power system [
1]. The state of a power system can be estimated based on the supervisory control and data acquisition (SCADA) measurements, phasor measurement unit (PMU) measurements, and a topology processor. Some of the most important functions of EMS are based on the SE, such as contingency analysis, optimal power flow, and security assessment [
2,
3]. Measurement data obtained straight from the telemetry is usually not perfect, as random errors are always present. These kinds of measurements need to be processed by SE to get the closest approximation to the real value before being used by the EMS functions. This fortifies the importance of SE in the transmission system level of power systems [
4].
In the last decade, there has been a paradigm shift in the distribution system technology. The conventional unidirectional model had changed as the consumers in the distribution system have evolved from passive users to active users [
5]. Around the same period, the concept of microgrids started to emerge as an alternative solution for local energy systems with distributed energy resources [
6]. The introduction of microgrids led to distribution systems that are more active, with more diverse dynamics and service-oriented actions compared to their predecessor. This phenomenon established a need to bring distribution systems into the operation control and monitoring circle. Consequently, the development of microgrid SE is inevitable. However, due to the differences of the transmission and distribution systems [
7,
8], the tools used for transmission system SE (TSSE) might not be directly applicable for microgrids and would need some adjustment for microgrid SE application.
One of the main problems in microgrid SE applications is the lack of available real-time measurements in microgrids. As a result, the input data required by the observability analysis in the SE process is not sufficient. One of the ideas to solve the measurement scarcity problem is the use of pseudo-measurements [
1,
9]. Pseudo-measurements are usually generated using the daily load profile (DLP) with annual updates [
10]. Nowadays, the presence of advanced metering infrastructure (AMI) might help in providing a more accurate definition of DLP, which could lead to improved pseudo-measurements [
11], and as a result, a more accurate microgrid SE.
Conventionally, state estimators are formulated as overdetermined systems of nonlinear equations, which are then solved by using the weighted least squares (WLS) method [
1,
12]. Conventional SE use the measurement data acquired at the present time to estimate the state of the system. In [
13], a fuzzy linear SE model based on Tanaka’s fuzzy linear regression model was employed to model the uncertainty in the system. In [
14], a decentralized SE method was proposed for hybrid microgrids using a dual decomposition approach, where the estimation was separately conducted for either grid, with only limited information exchanged during the process. In [
15], a state estimator was developed with centralized and decentralized approaches for hybrid alternating current (AC)/high voltage DC (HVDC) grids. The optimization-oriented state estimators were proven to be functional and stable, but in terms of computational speed and accuracy further improvement is desired. In [
16], a fast real-time state estimator based on the belief propagation algorithm was proposed. The model proved to be robust against ill-conditioned scenarios caused by the differences between various measurements.
Different efforts towards a fast real-time SE were introduced in [
17], where the artificial neural network (ANN) method was used for a smart grid SE. Another effort using a deep learning-based state estimator is shown in [
18], which combines the use of a deep neural network (DNN) for TSSE and a recurrent neural network (RNN) for state forecasting. With the offline training phase, the state estimator proved to be able to run in real time with affordable training and minimal tuning, which resulted in improved performance compared with existing alternatives. In [
19], a shallow neural network is used in a distribution system state estimator to produce an approximation of the system’s state. The state is then sent into the Gauss–Newton algorithm for refinements, which results in fast convergence to an optimal solution of SE. Different deep learning methods for distribution grid SE were tested in [
20]. In the literature, an auto-associative neural network (AANN), or autoencoder-based state estimator, was shown to have the advantage of being independent of the network parameters and topology, which resulted in effective and accurate estimation.
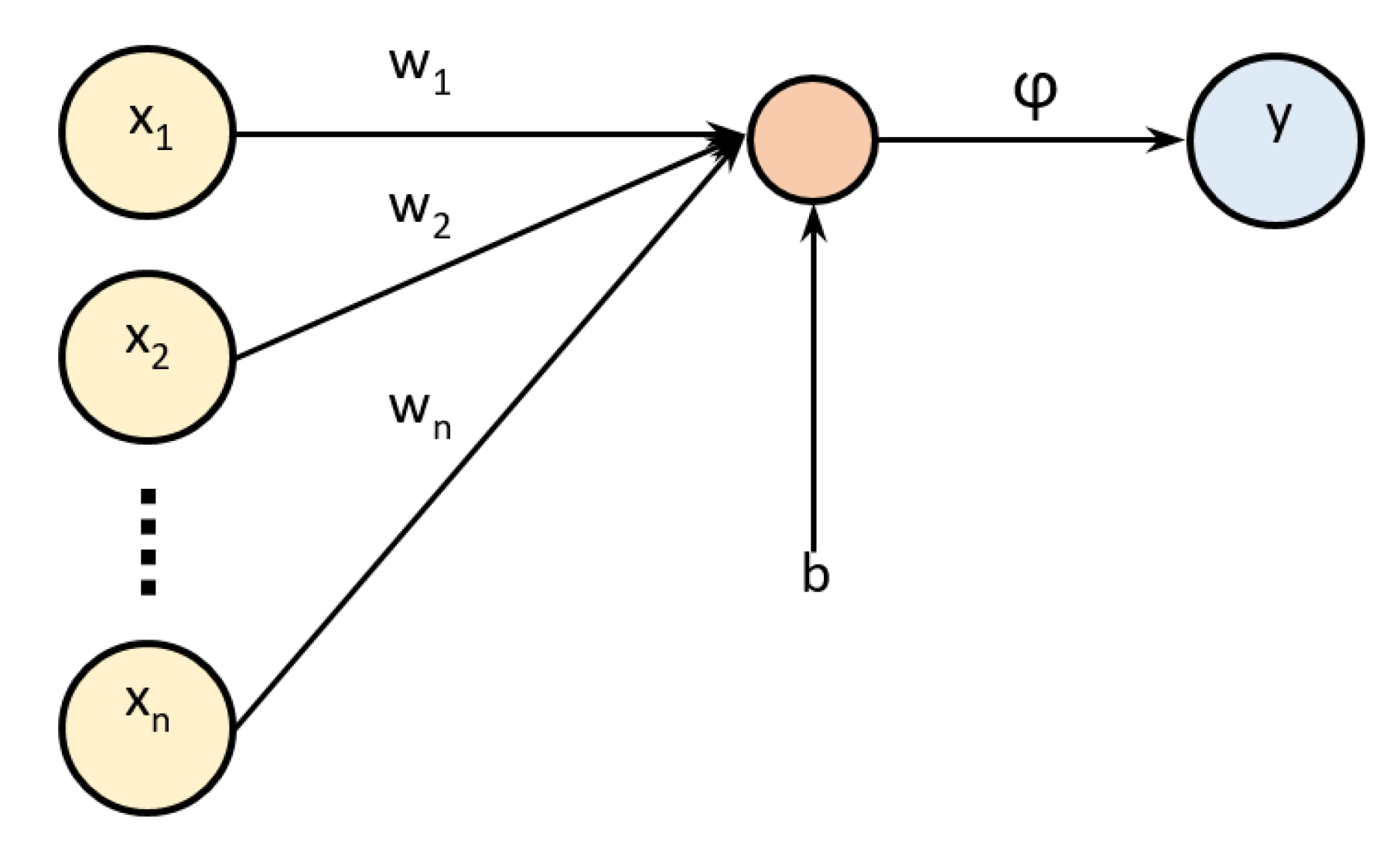
In electric power systems, deep learning applications are not limited to SE only. A multilayer perceptron (MLP) neural network was adopted in [
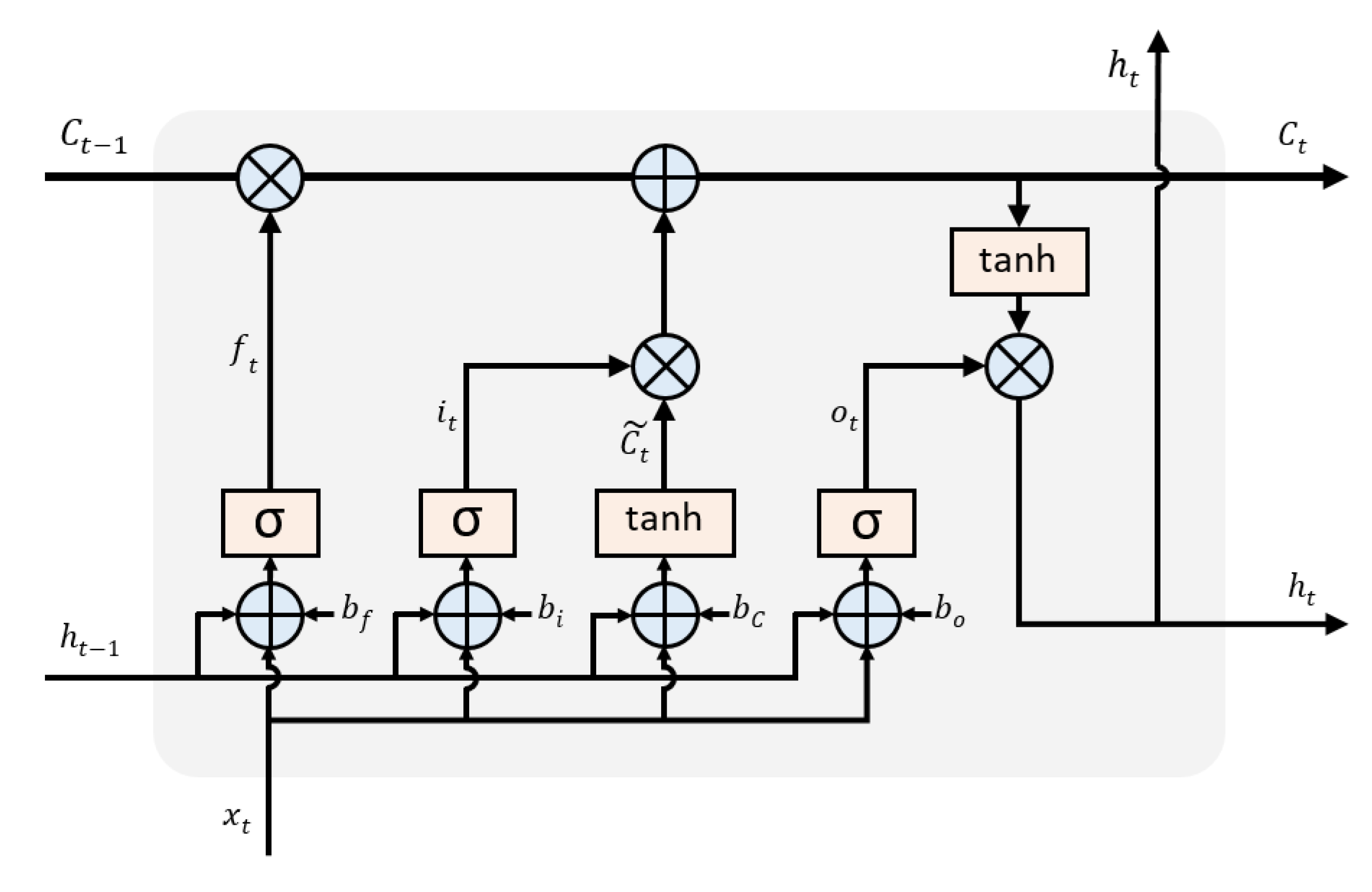
21] for short-term load forecasting, which produces minimal estimation errors. Another deep learning method, namely the long short-term memory (LSTM) network, was used in [
22] for residential load forecasting, which outperformed the listed rival algorithm in forecasting individual residential households in terms of forecasting performance. Meanwhile, in [
23], LSTM was used to forecast solar irradiance for microgrids based on widely available weather data only. The literature showed higher accuracy compared to the simple feedforward neural network (FFNN) method.
From all the previous works, one can notice that neural networks and deep learning approaches can provide better results over the conventional methods in some applications in terms of accuracy and computational speed. Additionally, in microgrid SE, one problem with the conventional method is the usage of pseudo-measurement. Out of several measurement types used as the SE input, the pseudo-measurement has the highest error variance, which could cause a sub-optimal SE result. For application of the deep learning method for SE in the microgrid system, the historical data is used in the training process of the state estimator, unlike the conventional WLS SE, which only uses the present time data. However, even though both methods used pseudo-measurement, the deep learning method training process disregarded the error variance of all measurement types. Hence, the deep learning method, if applied for SE in microgrid systems, might give improved SE results.
A lot of studies have been done on SE, such as TSSE, distribution system SE, and microgrid SE in general. However, not many studies have discussed DC microgrid SE. In particular, this paper proposes a DC microgrid state estimator using a modified LSTM network. LSTM is chosen as its structure allows the capability to learn the long-term dependencies in sequential data [
24,
25,
26]. This ability makes LSTM especially good at learning time-series data, which conveniently, in the case of microgrid SE, is the structure of the measurement data as the historical data. LSTM predicts an output based on the current input and previous calculated output. In comparison, MLP only considers the current input to predict an output and does not utilize its previous output to improve its prediction accuracy. Furthermore, there had not been any previous attempt at using the LSTM method for SE.
To estimate the state of a DC microgrid, measurements of the bus voltage magnitude and current flow are collected to train our LSTM state estimator. Additionally, in order to demonstrate the algorithm’s ability to solve the observability problem in microgrid systems, the pseudo-measurements are included to increase the accuracy of the SE. In this paper, a loss function resembling the objection function of the conventional WLS state estimator is used to train the network model. A set of weights is applied to the loss function, in which certain weight values correspond to certain measurement types. The same simulation schemes are applied to the other methods of SE (e.g., conventional WLS, MLP-based, and normal LSTM-based SE) as a comparison to validate the performance of the proposed modified LSTM-based SE.
The contributions of this paper in comparison with the existing literature can be summarized as follows:
The paper investigated a deep-learning-based state estimator for DC microgrids.
The state estimator adopted the LSTM network method, which until recently has only been applied in forecasting studies.
The LSTM for the state estimation of DC microgrids was modified to obtain better performance, using WLS-based loss function for training.
The rest of this paper is structured as follows. In
Section 2, the background of the conventional SE method for electrical power systems is explained.
Section 3 covers the basics of deep learning methods, such as multilayer perceptron (MLP) and LSTM networks. Further discussion about SE for DC systems, the system configuration used for simulation, and the types of measurements for SE are presented in
Section 4.
Section 5 gives an overview of the proposed state estimator. The simulation outcomes of the previously studied and the proposed state estimators are then demonstrated and discussed in
Section 6 and
Section 7, respectively. Finally, the conclusion is presented in
Section 8.
2. Conventional WLS SE Method
SE is an algorithm used to determine a close approximation of the system’s actual state from raw measurement data that is corrupted by noise. The WLS method is one of the most common methods adopted for SE [
1,
12]. The weight in the WLS method is introduced into the algorithm to emphasize trusted measurements and de-emphasize less-trusted measurements. The WLS method is based on a nonlinear optimization problem that minimizes the squared error of the measurement while taking into account the error variance of different measurement types. The general measurement model for SE is written as
where
is the measurement vector,
is the true state vector,
is the function linking the measurement to the state, and
is the measurement error, which is assumed to have zero mean and variance
. The complex nodal voltage is a commonly used variable in SE [
1]. The true state vector
is written as
where
is the voltage magnitude and
is the voltage angle.
The WLS method calculates the system’s state by iteratively minimizing the cost function
where
is the error variance and
is the number of measurements [
1,
12,
15]. The weighting matrix
is equal to the inverse of the error variance matrix
. The Gauss–Newton algorithm is used to minimize the cost function (Equation (3)). The algorithm is calculated iteratively, resulting in the normal equation being written as
where
is the Jacobian matrix of the measurement function
. The gain matrix
in Equation (4) is defined as
. The state estimate
is calculated using the vector
for each iteration
by the following equation, which is written as
The iteration process will stop and give the state estimate result when is reached, where is the desired accuracy.
5. Experimental Setup of the Proposed Modified LSTM-Based State Estimator
5.1. Measurement Data Preparation for DC Microgrid SE
The Power System Computer-Aided Design (PSCAD) software is used to simulate the DC microgrid. PSCAD is a time domain simulation software for analyzing power system transience. From the PSCAD simulation, we obtained 21-day long measurement data composed of the estimation input and the target output. The time resolution for the measurement data is 5 min.
For the conventional WLS state estimator, the last day of the 21-day long measurement data is used to estimate the state of the DC microgrid. For the deep-learning-based state estimator, the 21-day long measurement data are divided into 20-day long training data and 1-day long testing data, similar to the conventional WLS state estimator.
The estimation input is used for both the conventional WLS state estimator and the deep-learning-based state estimator to estimate the system state. For the DC microgrid SE, the estimation input is composed of three measurement types: the bus voltage, the current flow, and the power injection. White Gaussian noise is also added into these measurements.
The power sources in the DC microgrid are located on bus 5, bus 6, and bus 8. Assuming that the buses with the power sources are the controlled buses, the real measurements for voltage were performed on bus 5 (Vbus5), bus 6 (Vbus6), and bus 8 (Vbus8). Measurement error of 1% was considered for the voltage measurement.
The measurements of the current flow were done on all of the lines connected to the buses with the power sources. The real measurements were done on line 5–4 (Iflow54), line 6–4 (Iflow64), line 5–7 (Iflow57), line 6–9 (Iflow69), line 8–7 (Iflow87), and line 8–9 (Iflow89). Measurement error of 3% was considered for the current flow measurement.
Assuming that there were no real measurements on the load buses, pseudo-measurements were used to get the power injection measurements. The pseudo-measurements used in the simulated state estimators were obtained and modified based on the actual load demand of mainland South Korea in June 2014. The measurements were conducted on bus 1 (Pinj1), bus 2 (Pinj2), and bus 3 (Pinj3). For pseudo-measurement, the measurement error of 15% was considered.
For the deep-learning-based state estimator, the information of the target output is needed to train the network model. In this research, the target output is composed of all of the buses’ voltage magnitude in the DC microgrid. The measurements were carried out on bus 1 (V1), bus 2 (V2), bus 3 (V3), bus 4 (V4), bus (V5), bus 6 (V6), bus 7 (V7), bus 8 (V8), and bus 9 (V9).
In order to get the error variance of the measurement, for a given percentage of measurement error, the equation is written as
assuming that
is the mean value of
ith measurement and a
deviation around the mean covers about 99.7% of the Gaussian curve [
9].
5.2. WLS-Based Loss Function for the Modified LSTM-Based State Estimator
In order to evaluate the candidate solution in an optimization algorithm, a function called the objective function is used. The objective function is often referred to as the cost function or loss function, and the value calculated by the loss function is referred to as loss [
26]. For the regression problem, the most commonly used loss function is the mean squared error (MSE) loss. Another loss function, such as the mean absolute error (MAE) or mean squared logarithmic error loss (MSLE), can also be used, depending on the need.
In this paper, the author proposed a WLS-based loss function for the training of the LSTM state estimator network. WLS loss error is chosen to represent the conventional WLS SE method in the deep-learning-based SE. The loss function equation is written as
where the square of the differences between the actual
ith output
and the predicted
ith output
based on the estimated DC voltages are multiplied by the corresponding weight of each different measurement type.
The weight
can also be represented as
In building the weight matrix
, the
is calculated using Equation (19), based on the measurement type
. The weight matrix
dimension should be made to be identical to the prediction or the actual output, which in this case is the 9-bus voltage magnitude. The diagonal matrix
is denoted as
The weight for the voltage output on bus 1, bus 2, and bus 3 is calculated in regard to the error variance of the power injection measurement, since in the conventional WLS state estimator, the pseudo-measurement of the power injection is used to estimate the voltage magnitude of the buses. For the same reason, the weight for the voltage output on bus 4, bus 7, and bus 9 is calculated in regard to the error variance of the current flow measurement, and the weight for the voltage output on bus 5, bus 6, and bus 8 is calculated in regard to the error variance of the voltage measurement.
5.3. Modified LSTM-Based State Estimator Specification
The specification for the proposed modified LSTM-based state estimator is shown in
Table 1. Additionally, the MLP-based state estimator and the normal LSTM-based state estimator were also simulated in comparison to the proposed modified LSTM-based state estimator. Initially, the number of layers and neurons were chosen arbitrarily from low number, then the number was gradually increased until the parameters that worked best for the specific dataset were found.
One of the most common problems in deep learning is the overfitting of the network model. Overfitting can happen when the model learns the training dataset too well but cannot generalize on another hold-out dataset [
24,
26]. We could diagnose whether a network model experienced overfitting by evaluating the network model’s performance on the training dataset and a validation dataset during the training period. In an overfitted model, the performance on the training dataset would usually be good and would continue to improve. At the same time, the performance on the validation dataset would improve up to
epoch, after which it would degrade. In this case, it is desirable to stop the training of the network model before the performance on the validation dataset starts degrading [
26]. This research used this early-stopping technique to overcome the overfitting problem, which improved the generalization of the deep-learning-based state estimator. The model with the highest validation accuracy is set as the final model.
5.4. State Estimator Performance Validation
The performance of all state estimators is validated by calculating the error value between the real simulated voltage value and the value estimated by the estimator. The types of error considered in this paper are the mean absolute error (MAE) in Equation (23), mean absolute percentage error (MAPE) in Equation (24), mean squared error (MSE) in Equation (25), and root mean squared error (RMSE) in Equation (26). In Equations (23)–(26),
is the number of samples in the dataset,
denotes the actual output, and
denotes the predicted output.
7. Discussion of Performance Evaluation
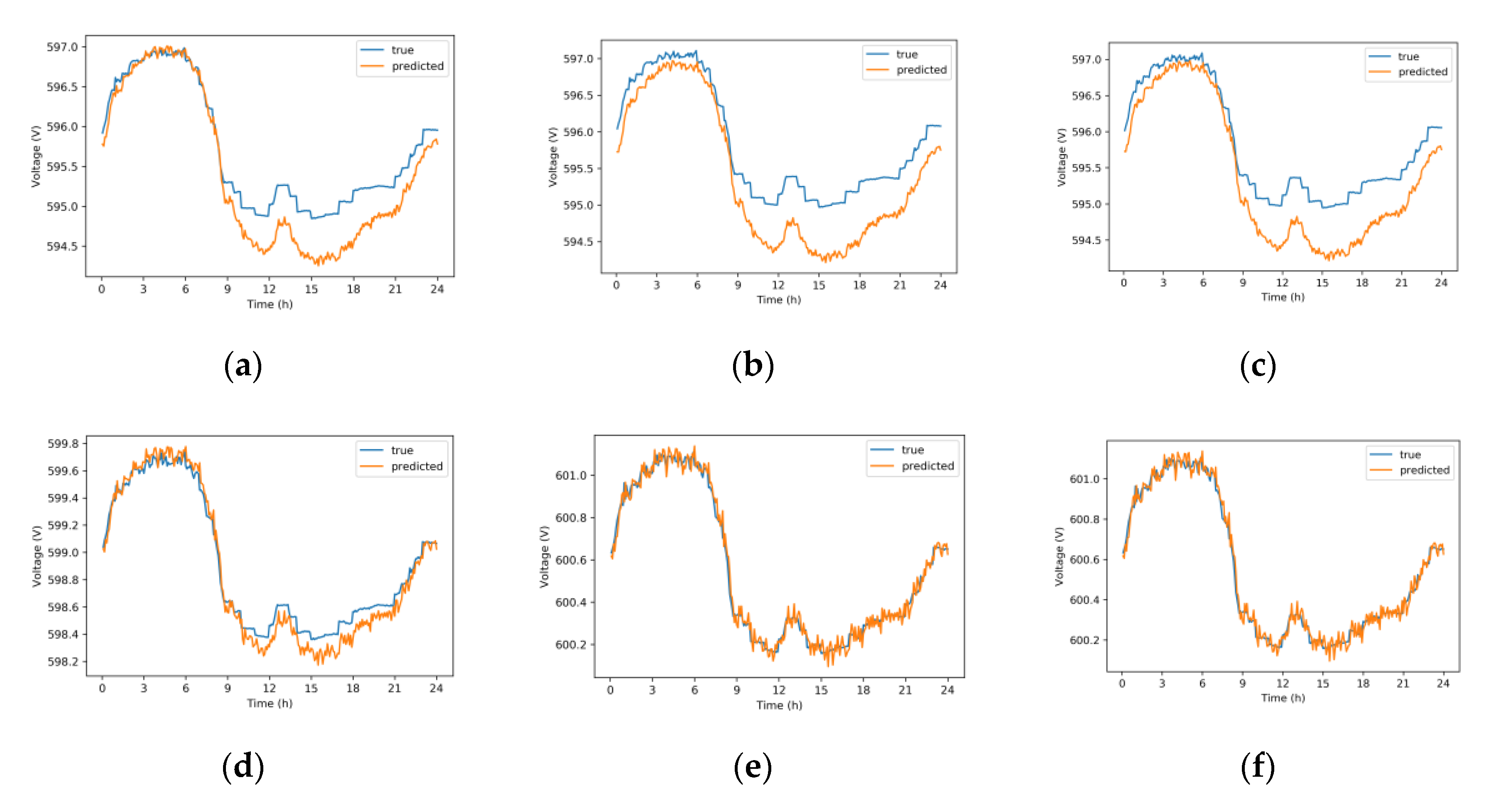
In order to demonstrate the effectiveness of the proposed method in estimating the DC microgrid’s state, the resulting error of the proposed modified LSTM-based state estimator is compared to the conventional WLS state estimator, the MLP-based state estimator, and the normal LSTM-based state estimator. Different types of evaluation metrics were calculated based on the equations (Equations (24–27)) shown in
Section 5.4, specifically the MAE, MAPE, MSE, and RMSE. The values for each type of error are shown in
Table 2.
Based on the results, the conventional WLS state estimator can be concluded to have the highest error rate for all error types compared to the deep-learning-based state estimators. This is due to the nature of the conventional WLS state estimator, which is dependent on the number of available measurements and the measurements’ error variance. The addition of pseudo-measurement in the conventional WLS state estimator did not help much in reducing the overall estimation error.
The difference between the conventional WLS state estimator and the deep-learning-based state estimators is the utilization of historical data and weight selection. Unlike the WLS state estimator, deep-learning-based state estimators also consider the past data information during their training process. Furthermore, in contrast to the WLS state estimator, for which weight is set based on the measurement error variance, the deep-learning-based state estimators can optimize their weight values to produce better predictions. By executing the learning approach and the data pattern recognition on the historical data, the deep-learning-based state estimators were shown to have smaller error values compared to the conventional WLS state estimator.
More specifically for the MLP approach, historical data were used in the training process of the network, resulting in an optimal weight to estimate the system state. The MLP network is trained using the backpropagation algorithm to learn the correlation between an output and current input, while optimizing its own weight with the gradient descent algorithm. As a result, the MLP-based state estimator produced better estimation than the conventional WLS state estimator.
Even though MLP can be used to make a time-series prediction, LSTM is much more suited for processing time-series data. Due to the structure of the network, LSTM allows all past information to persist over time. In the training process, the LSTM method calculated an output based on the current input and the previous output using the backpropagation through time algorithm, while the weight is optimized with the gradient descent algorithm. This process further improved the LSTM-based state estimator’s estimation more than the MLP-based and the conventional WLS state estimators.
The proposed modified LSTM-based state estimator has the smallest error value for all error types. Other than the advantages of the LSTM method itself, this is caused by the addition of the WLS loss function in the training of the LSTM network. Differing from the MSE loss function used in the normal LSTM-based state estimator, in the WLS loss function, the different weight values that were assigned to each parameter output error helped put an emphasis on the different types of measurements. The DC bus with the real simulated voltage measurement has the highest weight value, while the DC bus with pseudo-measurement has the lowest weight value. The addition of these weights further enhances the estimation output of the LSTM-based method.
The computation time of each state estimator is shown in
Table 3. The training time is the computation time in the offline training stage for the deep-learning-based estimators, while the testing time is the computation time required for each state estimator to estimate the voltage magnitude of DC buses to its highest accuracy in the online testing stage. Based on the table, overall, it took longer for the conventional WLS state estimator to estimate the voltage magnitude of DC buses. For the deep-learning-based estimators, although the training processes took quite some time, the computation times in the online testing stage are significantly faster than the conventional WLS state estimator. The modified LSTM-based state estimator has the longest training time, followed by the normal LSTM-based state estimator and the MLP-based state estimator. Looking at the structure of the network, the LSTM network has a more complex structure compared to the MLP network. Consequently, the computation times for LSTM-based state estimators are longer than the MLP-based state estimator.
The implementation of the proposed state estimator as the deep learning method in the real power system might have some drawbacks. The deep-learning-based state estimator need to be trained with a lot of measurement data, as this is necessary for good approximation of the system and is generally not possible for bulk power systems. Additionally, for topology changes in the system, the learning process for SE needs to be repeated. However, for microgrids, the acquisition of measurement data is rather easy, as the metering technology has become more advanced. Consequently, this makes the modified LSTM-based SE more applicable for microgrids systems.
Overall, based on the analysis, in terms of accuracy and computation time, the proposed modified LSTM-based state estimator has the best results. This proves the superiority of the proposed method in estimating the DC microgrid’s state compared to the other state estimators tested in this paper.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}