Microseismic Signal Denoising via Empirical Mode Decomposition, Compressed Sensing, and Soft-thresholding



Abstract
1. Introduction
2. EMD_CS_ST Denoising Method
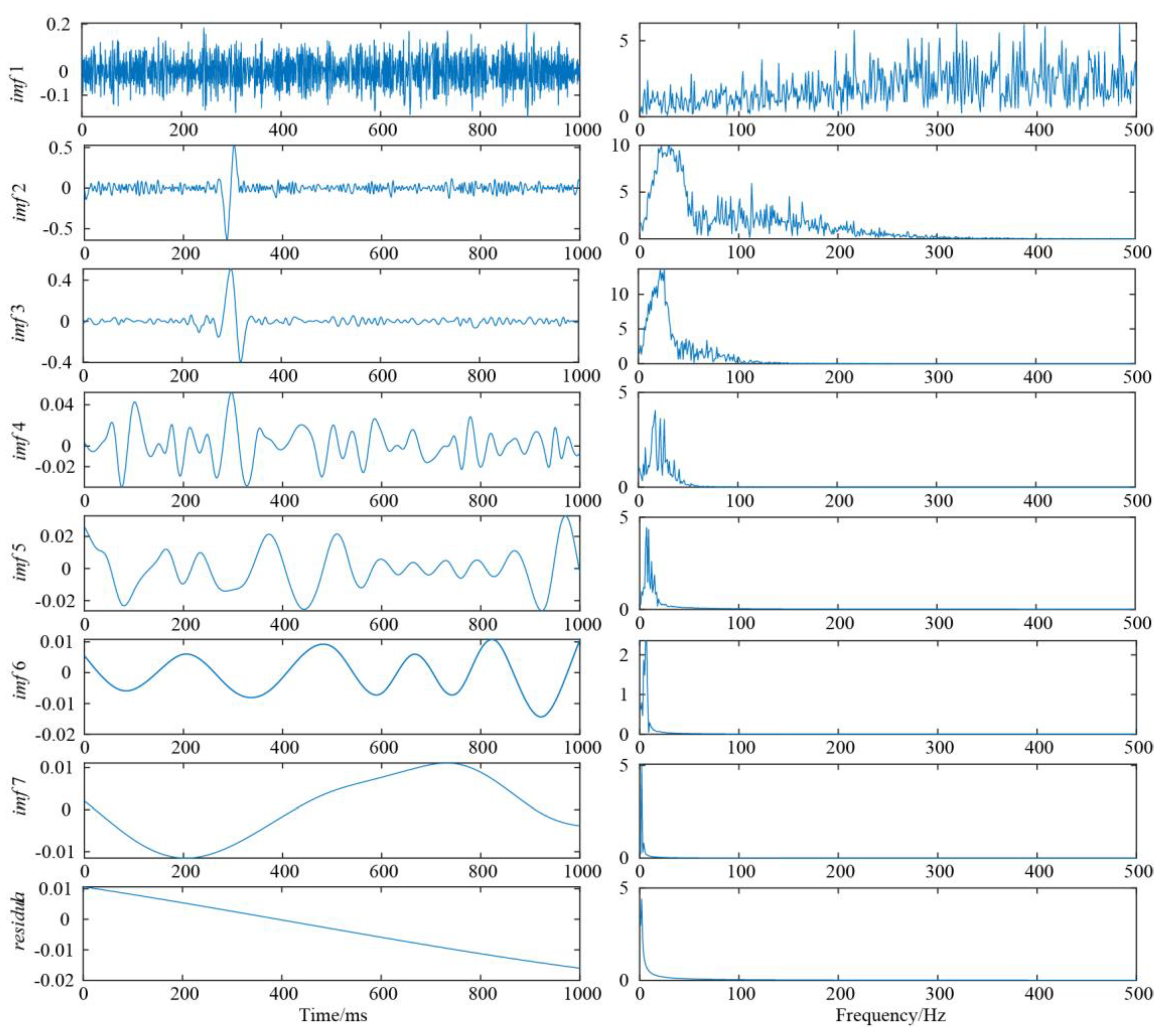
2.1. Empirical Mode Decomposition
2.2. Compressed Sensing
2.3. Soft-Thresholding
2.4. EMD_CS_ST Denoising
2.4.1. The Shortcomings of CS Denoising
2.4.2. Improvement of CS Denoising
3. Simulation Experiment
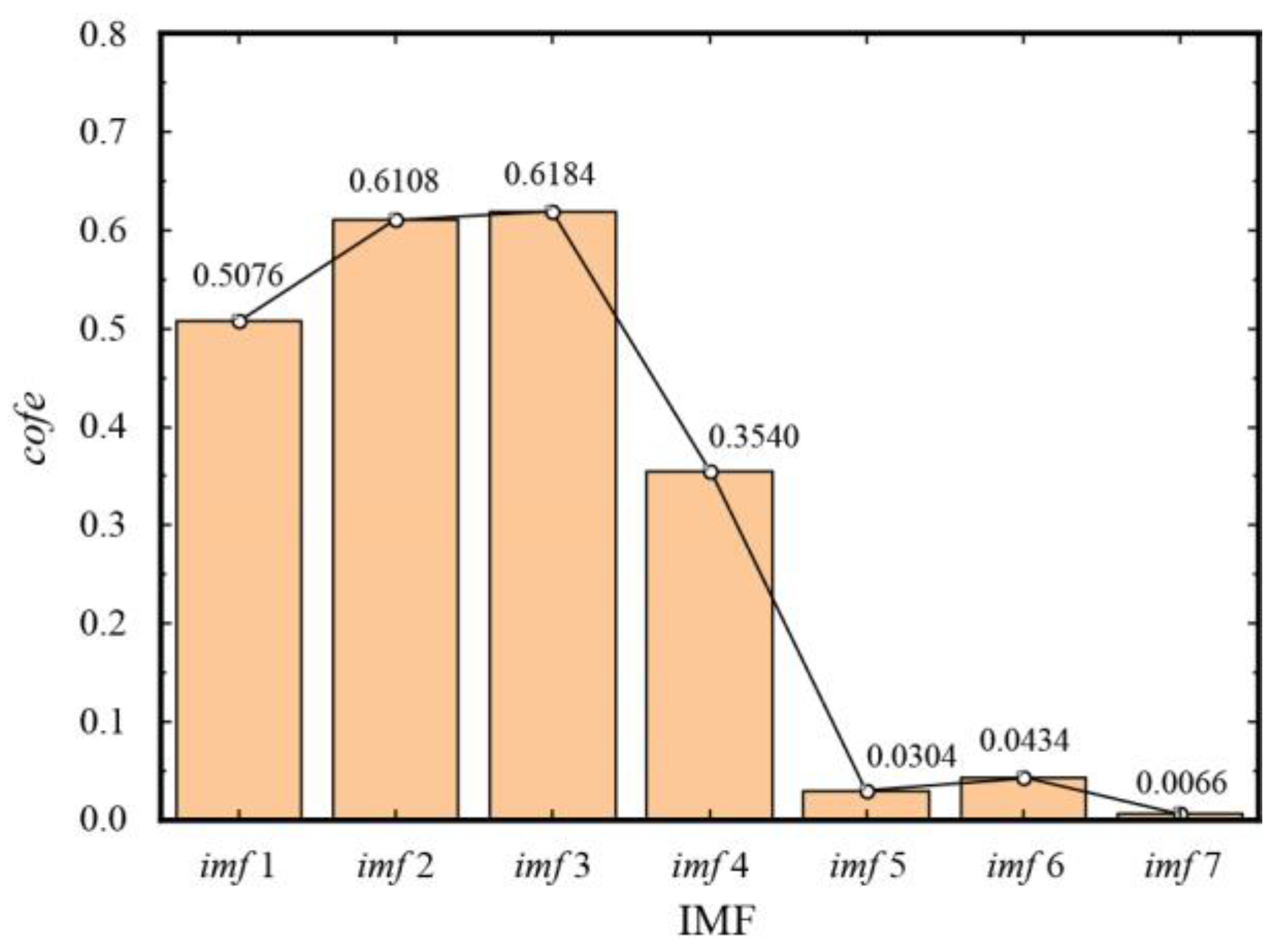
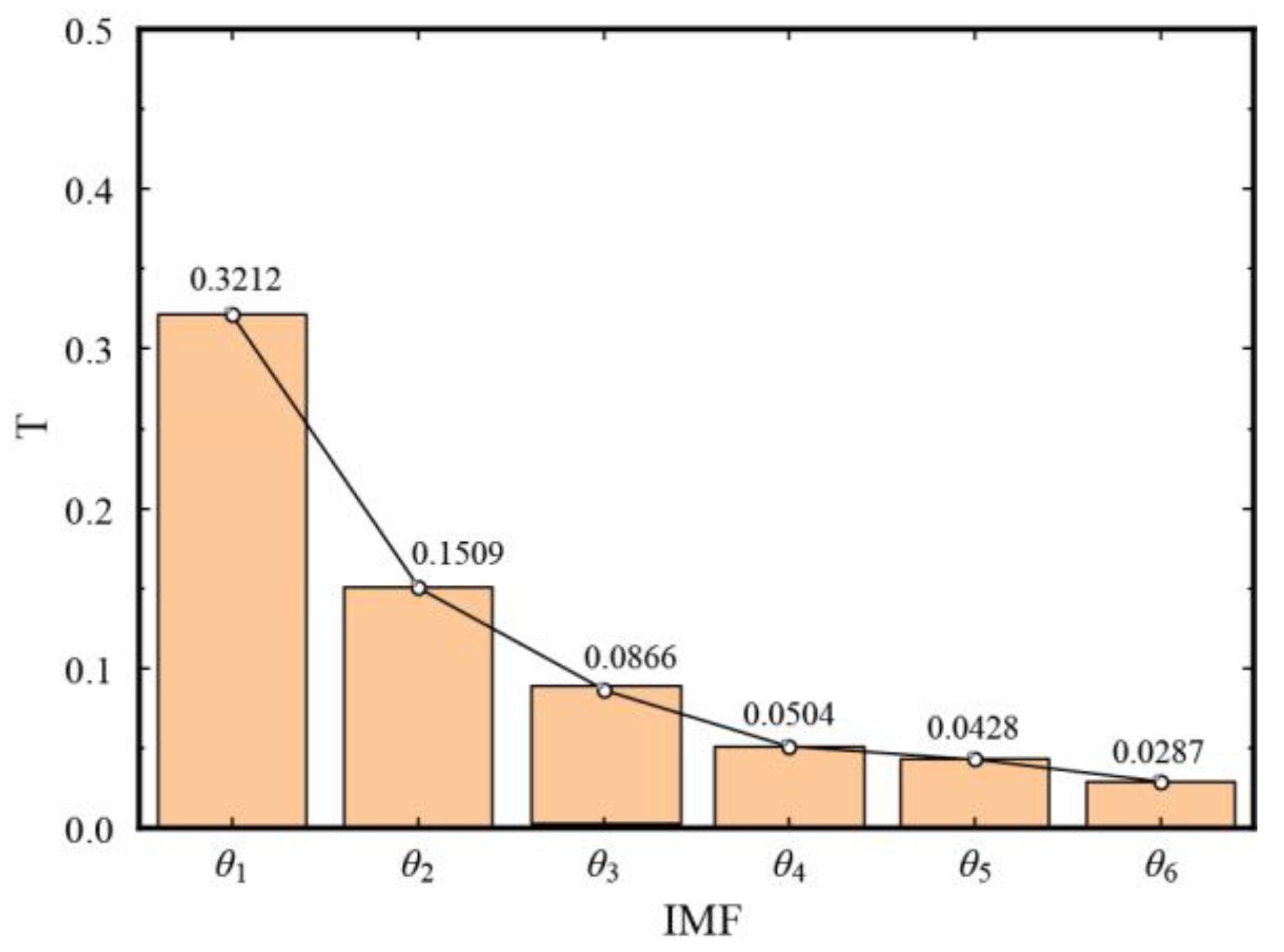
3.1. EMD_CS_ST Algorithm Application
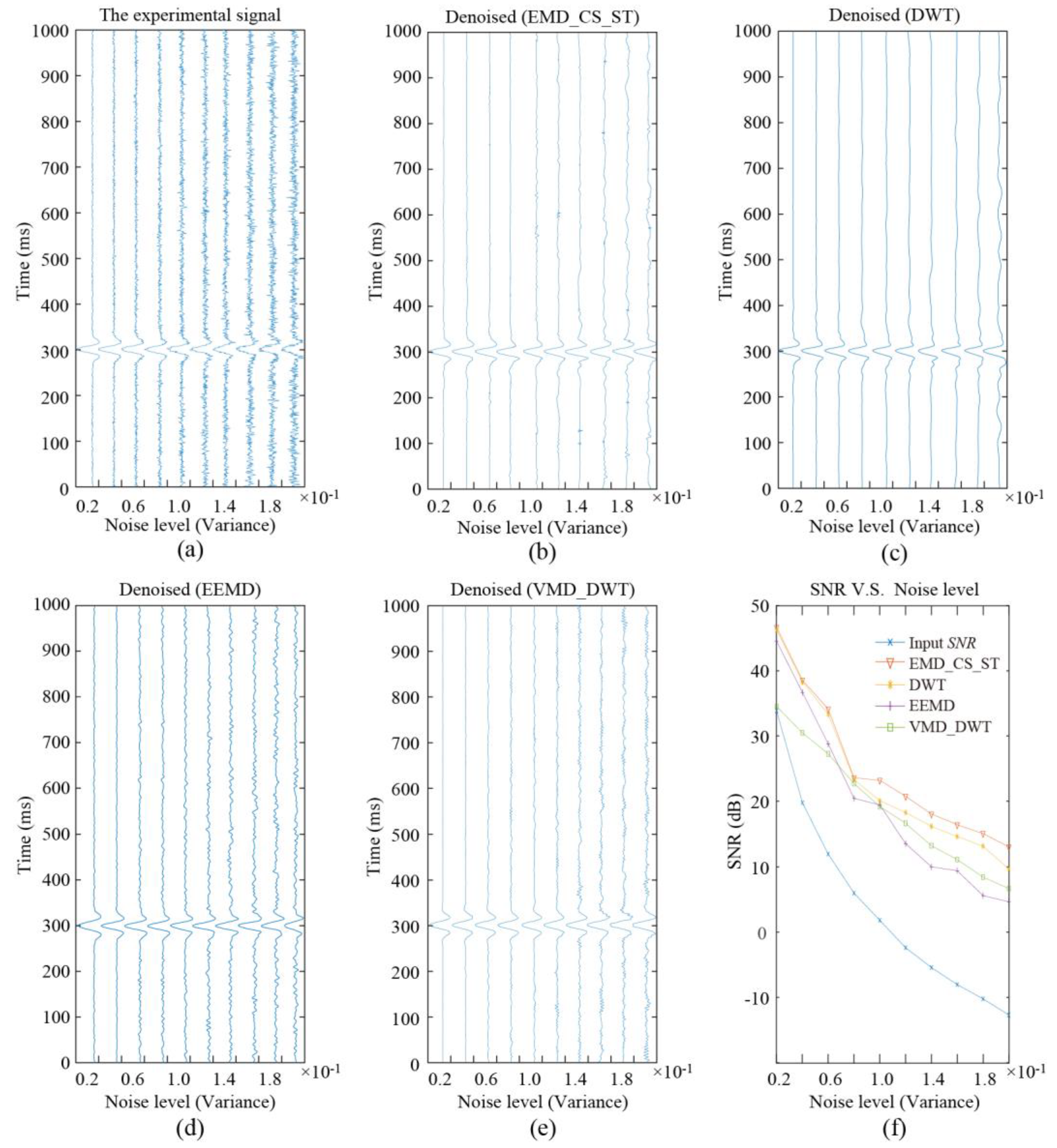
3.2. Comparison of Denoising Effects at Different Noise Levels
4. Case Study
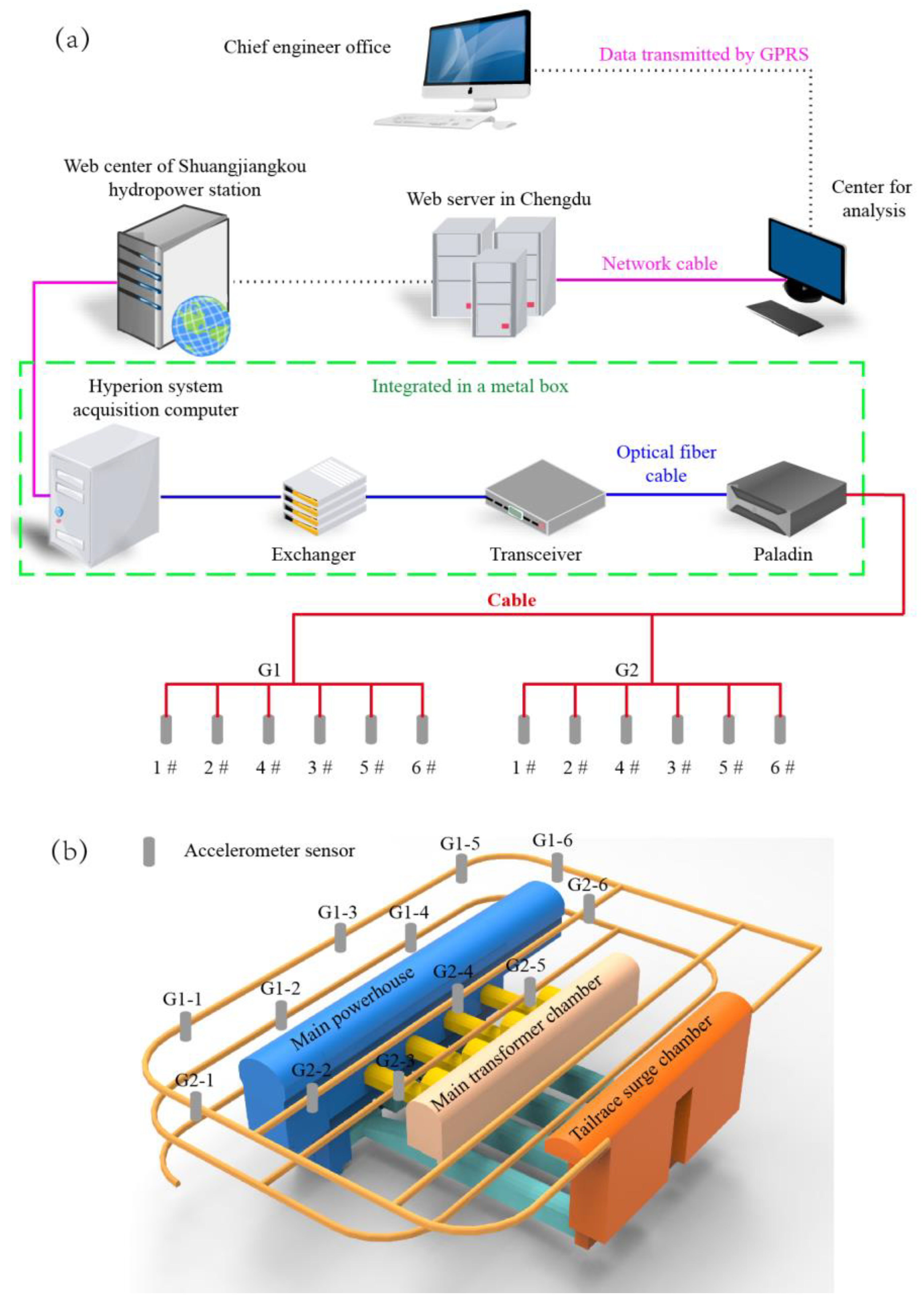
4.1. Description of the MS Monitoring System and Actual MS Signal
4.2. Field Data Examples
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Li, A.; Liu, Y.; Dai, F.; Liu, K.; Wei, M.D. Continuum analysis of the structurally controlled displacements for large-scale underground caverns in bedded rock masses. Tunn. Undergr. Sp. Technol. 2020, 97, 103288. [Google Scholar] [CrossRef]
- Zhao, Y.; Yang, T.; Bohnhoff, M.; Zhang, P.; Yu, Q.; Zhou, J.; Liu, F. Study of the Rock Mass Failure Process and Mechanisms During the Transformation from Open-Pit to Underground Mining Based on Microseismic Monitoring. Rock Mech. Rock Eng. 2018, 51, 1473–1493. [Google Scholar] [CrossRef]
- Xu, J.; Jiang, J.; Liu, Q.; Gao, Y. Stability Analysis and Failure Forecasting of Deep-Buried Underground Caverns Based on Microseismic Monitoring. Arab. J. Sci. Eng. 2018, 43, 1709–1719. [Google Scholar] [CrossRef]
- Dai, F.; Li, B.; Xu, N.; Meng, G.; Wu, J.; Fan, Y. Microseismic Monitoring of the Left Bank Slope at the Baihetan Hydropower Station, China. Rock Mech. Rock Eng. 2017, 50, 225–232. [Google Scholar] [CrossRef]
- Li, H.; Wang, R.; Cao, S.; Chen, Y.; Huang, W. A method for low-frequency noise suppression based on mathematical morphology in microseismic monitoring. Geophysics 2016, 81, V159–V167. [Google Scholar] [CrossRef]
- Iqbal, N.; Zerguine, A.; Kaka, S.; Al-Shuhail, A. Observation-driven method based on IIR Wiener filter for microseismic data denoising. Pure Appl. Geophys. 2018, 175, 2057–2075. [Google Scholar] [CrossRef]
- To, A.C.; Moore, J.R.; Glaser, S.D. Wavelet denoising techniques with applications to experimental geophysical data. Signal Process. 2009, 89, 144–160. [Google Scholar] [CrossRef]
- Li, J.; Li, Y.; Li, Y.; Qian, Z. Downhole microseismic signal denoising via empirical wavelet transform and adaptive thresholding. J. Geophys. Eng. 2018, 15, 2469–2480. [Google Scholar] [CrossRef]
- Han, J.; Mirko, V.D.B. Microseismic and seismic denoising via ensemble empirical mode decomposition and adaptive thresholding. Geophysics 2015, 80, KS69–KS80. [Google Scholar] [CrossRef]
- Liang, Z.; Peng, S.; Zheng, J. Self-adaptive denoising for microseismic signal based on EMD and mutual information entropy. Comput. Eng. Applicat. 2014, 50, 7–11. [Google Scholar] [CrossRef]
- Zuo, L.Q.; Sun, H.M.; Mao, Q.C.; Liu, X.Y.; Jia, R.S. Noise Suppression Method of Microseismic Signal Based on Complementary Ensemble Empirical Mode Decomposition and Wavelet Packet Threshold. IEEE Access 2019, 7, 176504–176513. [Google Scholar] [CrossRef]
- Haghighatshoar, S.; Abbe, E. Polarization of the Rényi Information Dimension with applications to compressed sensing. IEEE Trans. Inform. Theory 2017, 63, 6858–6868. [Google Scholar] [CrossRef]
- Deng, Q.; Zeng, H.; Zhang, J.; Tian, S.; Cao, J.; Li, Z.; Liu, A. Compressed sensing for image reconstruction via back-off and rectification of greedy algorithm. Signal Process. 2019, 157, 280–287. [Google Scholar] [CrossRef]
- Mammone, N.; De Salvo, S.; Ieracitano, C.; Marino, S.; Cartella, E.; Bramanti, A.; Giorgianni, R.; Morabito, F.C. Compressibility of High-Density EEG Signals in Stroke Patients. Sensors 2018, 18, 4107. [Google Scholar] [CrossRef] [PubMed]
- Mammone, N.; De Salvo, S.; Bonanno, L.; Ieracitano, C.; Marino, S.; Marra, A.; Morabito, F.C. Brain network analysis of compressive sensed high-density EEG signals in AD and MCI subjects. IEEE Trans. Ind. Inform. 2018, 15, 527–536. [Google Scholar] [CrossRef]
- Bevacqua, M.T.; Crocco, L.; Di Donato, L.; Isernia, T. Non-linear inverse scattering via sparsity regularized contrast source inversion. IEEE Trans. Comput. Imag. 2017, 3, 296–304. [Google Scholar] [CrossRef]
- Bevacqua, M.T.; Isernia, T. Boundary indicator for aspect limited sensing of hidden dielectric objects. IEEE Geosci. Remote Sens. 2018, 15, 838–842. [Google Scholar] [CrossRef]
- Nianmin, G.; Meng, C.; Xuemei, F.; Haijun, S.; Ruirui, Z. Seismic data reconstruction method based compressed sensing theory. In Proceedings of the SPG/SEG 2016 International Geophysical Conference, Beijing, China, 20–22 April 2016; Society of Exploration Geophysicists and Society of Petroleum Geophysicists: Beijing, China, 2016; pp. 713–715. [Google Scholar] [CrossRef]
- Sun, Y.Y.; Jia, R.S.; Sun, H.M.; Zhang, X.L.; Peng, Y.J.; Lu, X.M. Reconstruction of seismic data with missing traces based on optimized Poisson Disk sampling and compressed sensing. Comput. Geosci. 2018, 117, 32–40. [Google Scholar] [CrossRef]
- Sun, M.; Li, Z.; Li, Z.; Li, Q.; Li, C.; Zhang, H. Reconstruction of seismic data with weighted MCA based on compressed sensing. Chin. J. Geophys. Chin. 2019, 62, 1007–1021. (In Chinese) [Google Scholar] [CrossRef]
- Donoho, D.L. Compressed sensing. IEEE Trans. Inform. Theory. 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Zhu, L.; Zhu, Y.; Mao, H.; Gu, M. A new method for sparse signal denoising based on compressed sensing. In Proceedings of the 2009 2nd International Symposium on Knowledge Acquisition and Modeling, KAM 2009, Wuhan, China, 30 November–1 December 2009; IEEE Computer Society: Wuhan, China, 2009; pp. 35–38. [Google Scholar] [CrossRef]
- Arias-Castro, E.; Eldar, Y.C. Noise folding in compressed sensing. IEEE Signal Proc. Lett. 2011, 18, 478–481. [Google Scholar] [CrossRef]
- Davenport, M.A.; Laska, J.N.; Treichler, J.R.; Baraniuk, R.G. The pros and cons of compressive sensing for wideband signal acquisition: Noise folding versus dynamic range. IEEE Trans. Signal Procs. 2012, 60, 4628–4642. [Google Scholar] [CrossRef]
- Wen, F.; Zhang, G.; Tao, Y.; Liu, S.; Feng, J. Adaptive compressive sensing toward low signal-to-noise ratio scene. Acta Phys. Sin. Chin. Ed. 2015, 64, 84301. (In Chinese) [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. 1998, 903–995. [Google Scholar] [CrossRef]
- Li, Y.; Peng, J.; Ma, H.; Lin, H. Study of the influence of transition IMF on EMD do-noising and the improved algorithm. Chin. J. Geophys. Chin. 2013, 56, 626–634. (In Chinese) [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Advan. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Candes, E.J.; Wakin, M.B.; Boyd, S.P. Enhancing Sparsity by Reweighted ℓ 1 inimization. J. Fourier Ananl. Appl. 2008, 14, 877–905. [Google Scholar] [CrossRef]
- Tipping, M.E. Sparse Bayesian Learning and the Relevance Vector Machine. J. Mach. Learn. Res. 2001, 1, 211–244. [Google Scholar] [CrossRef]
- Candes, E.J.; Tao, T. Decoding by linear programming. IEEE Trans. Inform. Theory 2005, 51, 4203–4215. [Google Scholar] [CrossRef]
- Baraniuk, R. Compressive sensing [Lecture notes]. IEEE Signal Proc. Mag. 2007, 24, 118–121. [Google Scholar] [CrossRef]
- Ahmed, N.; Natarajan, T.; Rao, K. Discrete Cosine Transform. IEEE Trans. Comput. 1974, 23, 90–93. [Google Scholar] [CrossRef]
- Bluestein, L.I. A linear filtering approach to the computation of discrete Fourier transform. IEEE Trans. Audio Electroacoust. 1970, 18, 451–455. [Google Scholar] [CrossRef]
- Chang, C.; Girod, B. Direction-adaptive discrete wavelet transform for image compression. IEEE Trans. Image Process. 2007, 16, 1289–1302. [Google Scholar] [CrossRef] [PubMed]
- Donoho, D.L. De-noising by soft-thresholding. IEEE Trans. Inform. Theory 1995, 41, 613–627. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, M.; Zhao, Y.; Jin, B.; Dai, W. Denoising of the Fiber Bragg Grating Deformation Spectrum Signal Using Variational Mode Decomposition Combined with Wavelet Thresholding. Appl. Sci. 2019, 9, 180. [Google Scholar] [CrossRef]
- Dai, F.; Li, B.; Xu, N.; Zhu, Y. Microseismic early warning of surrounding rock mass deformation in the underground powerhouse of the Houziyan hydropower station, China. Tunn. Undergr. Sp. Technol. 2017, 62, 64–74. [Google Scholar] [CrossRef]
- Xu, N.; Li, T.; Dai, F.; Li, B.; Zhu, Y.; Yang, D. Microseismic monitoring and stability evaluation for the large scale underground caverns at the Houziyan hydropower station in Southwest China. Eng. Geol. 2015, 188, 48–67. [Google Scholar] [CrossRef]
- Xu, N.; Dai, F.; Li, B.; Zhu, Y.; Zhao, T.; Yang, D. Comprehensive evaluation of excavation-damaged zones in the deep underground caverns of the Houziyan hydropower station, Southwest China. Bull. Eng. Geol. Env. 2017, 76, 275–293. [Google Scholar] [CrossRef]
- Xiao, H.; Xu, Z.; Lyu, S. Quasi-Steady-State scheme and application on prewhirl flow and heat transfer in aeroengine. Int. J. Precis. Eng. Man 2015, 16, 343–350. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | B-SNR | A-SNR | SD | CC |
|---|---|---|---|---|
| EMD_CS_ST | 4.651 | 27.170 | 0.028 | 0.972 |
| DWT | 4.651 | 22.624 | 0.035 | 0.955 |
| EEMD | 4.651 | 21.285 | 0.038 | 0.945 |
| VMD_DWT | 4.651 | 23.680 | 0.034 | 0.952 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Dong, L.; Li, B.; Lei, Y.; Xu, N. Microseismic Signal Denoising via Empirical Mode Decomposition, Compressed Sensing, and Soft-thresholding. Appl. Sci. 2020, 10, 2191. https://doi.org/10.3390/app10062191
Li X, Dong L, Li B, Lei Y, Xu N. Microseismic Signal Denoising via Empirical Mode Decomposition, Compressed Sensing, and Soft-thresholding. Applied Sciences. 2020; 10(6):2191. https://doi.org/10.3390/app10062191
Chicago/Turabian StyleLi, Xiang, Linlu Dong, Biao Li, Yifan Lei, and Nuwen Xu. 2020. "Microseismic Signal Denoising via Empirical Mode Decomposition, Compressed Sensing, and Soft-thresholding" Applied Sciences 10, no. 6: 2191. https://doi.org/10.3390/app10062191
APA StyleLi, X., Dong, L., Li, B., Lei, Y., & Xu, N. (2020). Microseismic Signal Denoising via Empirical Mode Decomposition, Compressed Sensing, and Soft-thresholding. Applied Sciences, 10(6), 2191. https://doi.org/10.3390/app10062191