1. Introduction
An autonomous underwater vehicle (AUV) usually performs various tasks in the complex marine environment, but the occurrence of failure will cause a loss that cannot be measured. Therefore, there is a need for an intelligent vehicle capable of responding to an emergency; that is, it should be able to perform automatic fault diagnosis [
1].
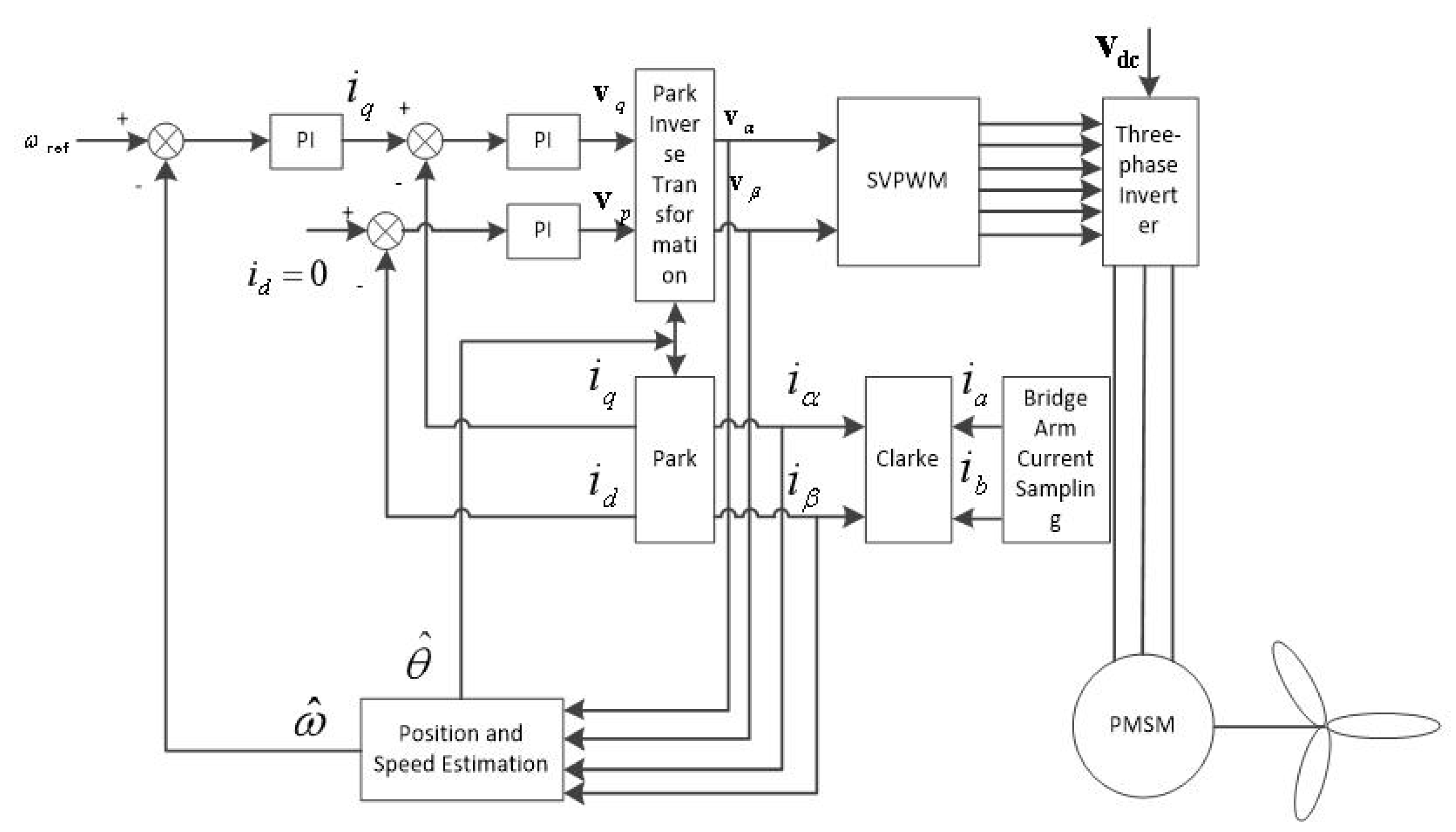
The AUV consists of several components, of which the actuator is the key component and the most heavily loaded component. In the marine environment, there are external random disturbances, such as currents and strong measurement noise. AUV itself is a strong nonlinear system with large inertia and large time-delay characteristics, which makes the theory and method of the actuator fault diagnosis. Many scholars have made research results in AUV actuator fault diagnosis technology, but most of them focus on the hard faults of the actuator and the large loss of output, but less on the weak fault diagnosis. At the same time, the weak faults of the actuators are mostly early faults. Effective detection and diagnosis of early faults as early as possible plays an important role in avoiding “catastrophic accidents” caused by AUVs [
2,
3,
4].
The main problems of fault diagnosis for AUV actuators are: Santosa et al. [
5] established an AUV fault diagnosis model with four horizontal and two vertical thrusters. The methodology defines that, in the case of partial fault or complete fault (failure) in horizontal thrusters located in different action planes (which defines the axis or plane where component(s) of forces are actuating in this plane), horizontal propelling forces are calculated through the allocation matrix, used in the pseudo-inverse method, without any change, and a modified weighted matrix. Alvarez et al. [
6] presented how the model is learned using the Expectation Maximization algorithm for Gaussian Mixtures and how the testbed is monitored by probabilistic inference. The jamming fault of the motor and other faults are simulated and diagnosed by using a GMM classifier through the motor temperature, current, voltage, and other data. They described how the framework deals with non-Gaussian data and how it reflects in the accuracy overall.
Sun et al. [
7] introduced an improved Elman neural network, which was applied to the underwater vehicle motion modeling. Through designing a self-feedback connection with fixed gain in the unit connection, as well as increasing the feedback of the output layer node, the improved Elman network has faster convergence speed and generalization ability. This method for a high-order nonlinear system has stronger identification ability. Zhang et al. [
8] improved the multi-fault pattern classifier training speed and fault diagnosis accuracy of the fuzzy weighted support vector domain description (FWSVDD), and a multi-fault mode classification method based on a hierarchical strategy was proposed. A model-based fault diagnosis method was established on the Livingstone 2 system, and a fault tree was established to classify faults by level [
9].
The main problems of weak fault diagnosis for AUV actuators are: Nascimento et al. [
10] presented an evaluation of Recurrent Neural Networks (RNN) for a data-driven fault detection and diagnosis scheme for underwater thrusters with empirical data. The nominal behavior of the thruster was modeled using the measured control input, voltage, rotational speed, and current signals. They evaluated the performance of fault classification using all the measured signals compared to using the computed residuals from the nominal model as features.
Partial kernel principal component analysis (PKPCA) was studied for sensor fault detection and isolation (FDI) of an autonomous underwater vehicle. In order to achieve fault isolation, partial KPCA was proposed where a set of residual signals was generated based on the parity relation concept.
And by building models of actuators or systems, researchers have used a data-driven approach [
11], Gaussian Particle Filter [
12], Terminal Sliding Mode Observer [
13], Non-Linear Principal Component Analysis (NLPCA) Hybrid Approach [
14], and Gaussians and Variational Bayes Approximation (Fagogenis et al.).
The weak faults of actuators are usually early faults. If these early weak faults of actuators can be detected as early as possible, the strong faults of actuators that will eventually stop working will be avoided. The AUV can make a corresponding judgment and treatment in time to avoid the occurrence of greater accidents. It can be seen from the above literature that the current fault diagnosis has a good effect on the diagnosis of strong faults, and most of them adopt the method of fault data training and actuator models. Therefore, the method in this paper can adaptively diagnose weak faults without fault data and a system model [
15,
16].
The second section is the related theory of the Tri-stable stochastic resonance fault diagnosis, which is introduced from (1) the AUV actuator dynamics model. (2) Principle of stochastic resonance. (3) Parameter compensation stochastic resonance. (4) Ant colony optimization algorithm principle. The third section is influencing factors of a multi-stationary stochastic resonance system. The fourth section is a practical engineering application. The fifth section presents conclusions.
3. Influencing Factors of Multi-Stationary Stochastic Resonance System
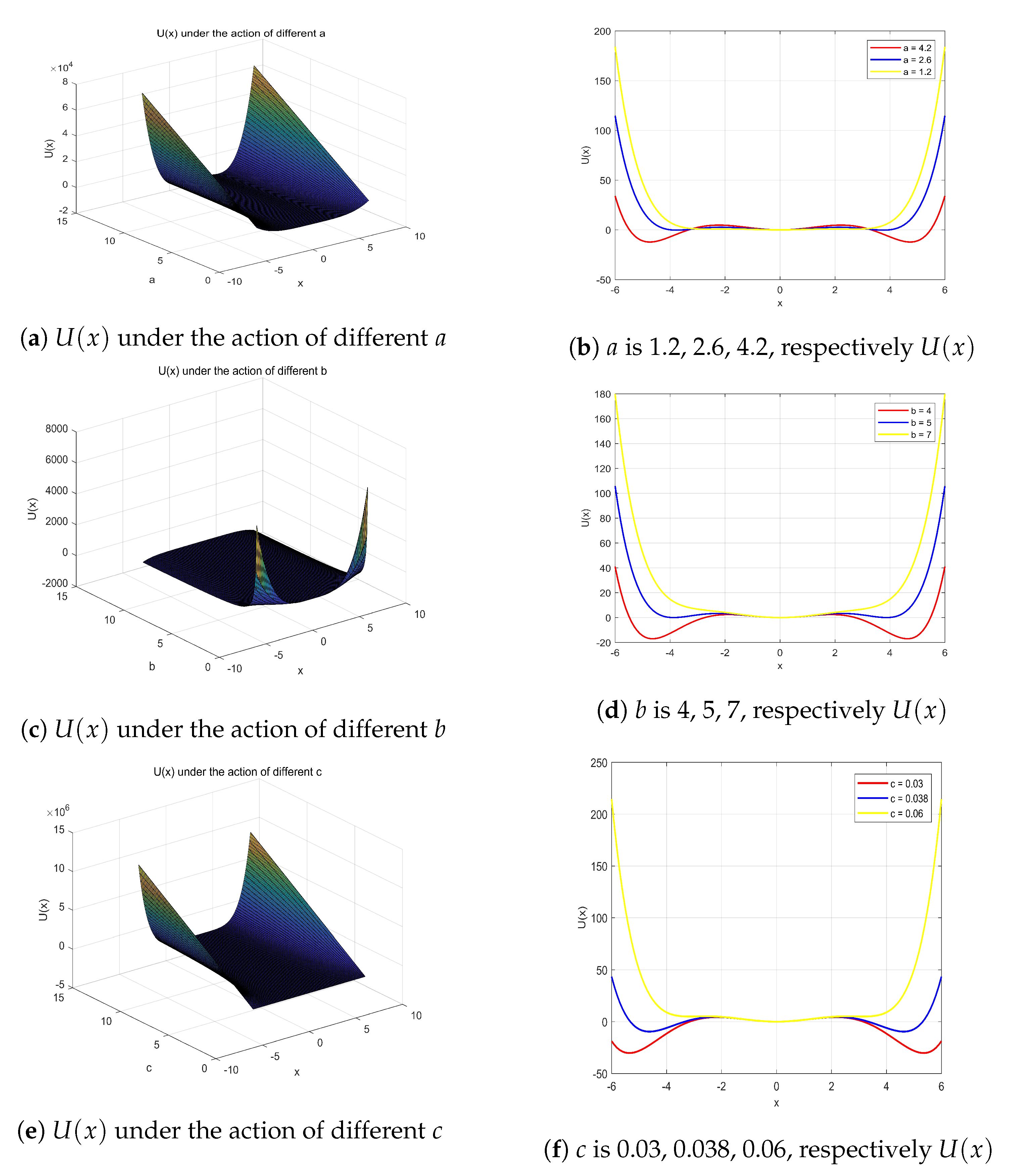
If the multi-stable SR system parameter
is given, the curve of its potential function and parameter
a is plotted, as shown in
Figure 3a. Take
a for 1.2, 2.6, and 4.2, respectively, and plot the potential function curve, as shown in
Figure 3b. It can be seen from the two figures that as the
a increases, the depths of the three wells increase, the width of the well becomes wider, and the system is multi-stable; as
a continues to increase, the two sides of the well depth will be much larger than the intermediate well depth until the intermediate well depth is reduced to zero, at which point the system switches to bi-stable.
If the multi-stable SR system parameters are
, the curve of the potential function and the parameter
b is plotted as shown in
Figure 3c. It can be seen from the figure that as
b increases continuously large, the system state gradually switches from multi-stable to mono-stable. Take
b as 4, 5, and 7, respectively, and obtain the potential function curve, as shown in
Figure 3d. It can be seen from the figure that when
b is small, the depth of the intermediate well is smaller than the depth of the left and right wells, and the system is multi-stable; but as
b increases, the depth of the intermediate well remains unchanged, and the depth of the wells gradually decreases. Finally, when the depth of the two wells is zero, the system will switch to mono-stable.
It can be seen from Equations (27) and (28) that by changing the system parameters , the three well depths of the multi-stable potential function can be changed, thereby changing the barrier height and further affecting whether the energy of the particles can be overcome by doing a periodic motion between potential wells. Since the multi-stable system has better detection capability than the mono-stable system and the bi-stable system, the system is selected in a multi-steady state as the system parameters are selected. In order to make the system in a multi-steady state, it is necessary to study the influence of system parameters on the system to determine the range of values of each parameter.
First, define the ratio of
and
to
R. Its expression is Equation (
38)
It can be seen from the above equation that when , the ratio R is 1, and the energy required for the periodic transition of the particles between each potential well is the same. When , which is , the energy required for the particles to transition from the two potential wells to the intermediate well is less than the energy required for the particles to transition from the intermediate well to the two wells. When , which is , the energy required for the particles to transition from the intermediate potential well to the two potential wells is less than the energy required for the particles to transition from the two potential wells to the intermediate potential well.
Assume that the input signal amplitude
and noise intensity
D of the system are both 0, and the variation law of
R with the system parameter
a is shown in
Figure 4.
It can be seen from
Figure 5 that when
b and
c take different values, as
a increases continuously, the
R value increases first and then decreases, and each
R value corresponds to two different
a values, When
, its peak value is reached, that is, the ratio of
and
is the largest,
. When
and
,
, the curves of the well depth with
R are shown in
Figure 5.
It can be concluded from
Figure 5 that when
, as the
R increases, the depth of the wells decreases and the depth of the intermediate well increases. When
, as
R increases, three The depth of each well is decreasing continuously. When
, the depth of the wells on both sides is greater than the depth of the intermediate well, and the energy required for the particles to transition from the intermediate well to the two wells is less than the energy required to transition from the two wells to the intermediate well. When
, the three wells have the same depth. When
, the depth of the intermediate well is greater than the depth of the wells on both sides, and the energy required for the particles to transition from the intermediate well to the two wells is more than the energy required for the two wells to transition to the depth of the intermediate well.
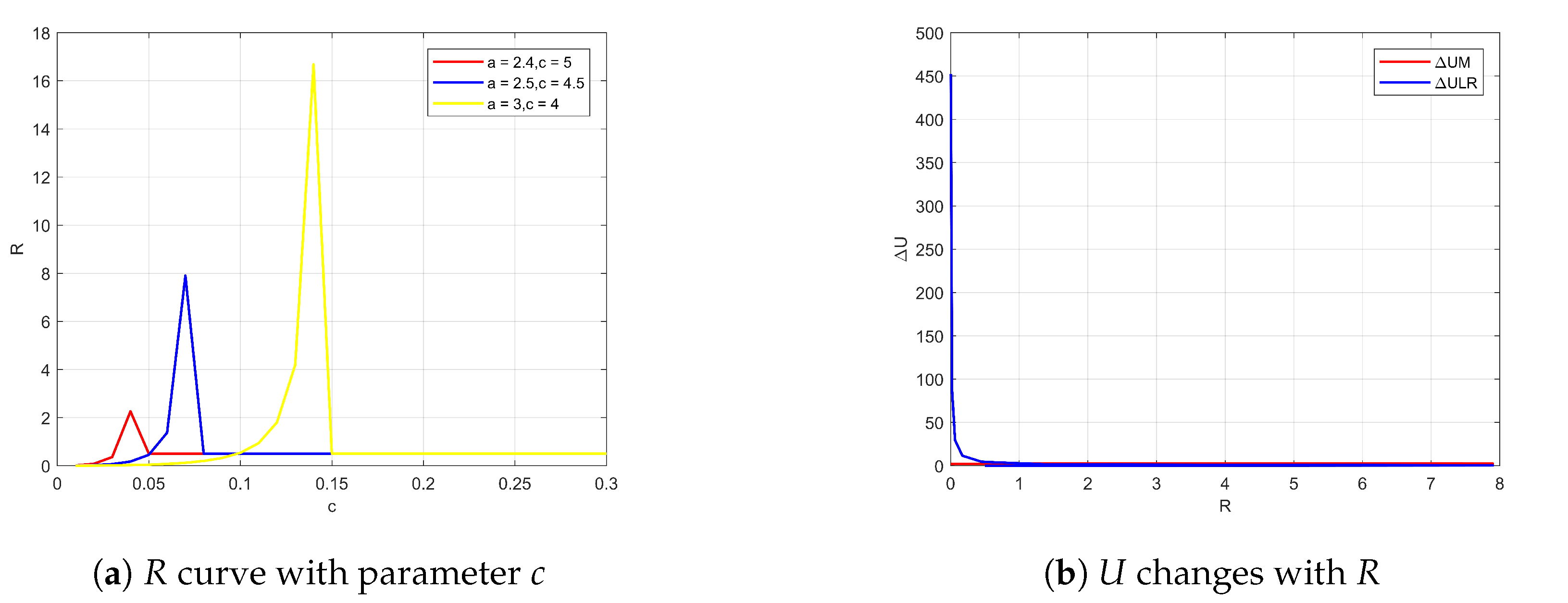
At the same time, as shown in
Figure 5b, when
, the depth of the wells on both sides is 201.02, and the depth of the intermediate well is about 10.15. At this time, the depth of the wells on both sides is much larger than the depth of the intermediate wells, so the system is approximated to bi-stability; when
R = 1, the three wells have the same depth and the system is multi-stable; as
R increases, when
, the depth of the wells on both sides is 0.0419, and the depth of the intermediate well is 0.8055. At this time, the depth of the intermediate well is much larger than the depth of the wells on both sides, and the system is approximately mono-stable. Therefore, when the system is multi-stable, that is, when
R = [0.05, 20], the value of
a ranges from 0.05 to 10.
The SR system parameters when
, the variation curve of
R with the system parameter
b, and the variation of the well depth with
R are shown in
Figure 6.
It can be seen from
Figure 6a that when
a and
c are combined with different values, as
R increases, each
R increases first and then decreases rapidly to a constant value; when
,
R does not change with the change of
b. At this time, its value is constant at 0.5, and the system remains multi-stable. Therefore, when
, the curve of the well depth with
R is plotted, as shown in
Figure 6b. When
, the depth of the wells on both sides is about 9.12, and the depth of the intermediate well is about 0.4185. At this time, the depth of the wells on both sides is much larger than the depth of the intermediate well, and the system is approximately bi-stable; at this time, the energy required for the particles to transition from the two wells to the intermediate well is much larger than the energy required for the intermediate well to transition to the two wells. With the increase of
R, when
, the depth of the well on both sides is 0.0502, and the depth of the intermediate well is 0.8458. At this time, the depth of the wells on both sides is much smaller than the depth of the intermediate well, and the system state is approximately mono-stable. Therefore, the system is multi-stable, that is, when
, the range of
b is [1, 10]. If
a given system parameter
, the curve of
R with system parameter
c and the curve of the potential well with
R are shown in
Figure 7.
It can be concluded from
Figure 7 that
R increases first and then decreases rapidly to a constant value as
c increases. When
, the
R value is stable at a constant value of 0.5, and the system remains multi-stable. It can be seen from
Figure 7b that when
, the depth of the wells on both sides is much larger than the depth of the intermediate well, and the system is approximately bi-stable; the energy required for the particles to transition from the two wells to the intermediate well at this time is much larger than the energy required for the intermediate well to transition to the two wells. When
, the three wells have the same depth and the system is multi-stable; as
R increases, the depth of the wells on both sides is almost zero when
, and the system is approximately mono-stable. Therefore, the system is multi-stable, that is, when
, the value of
c ranges from 0 to 0.3.
According to the above analysis, when , the depth of the intermediate well is much larger than the depth of the wells on both sides, and the mono-stable condition occurs easily; when , the depth of the intermediate well is much smaller than the depth of the wells on both sides, and the system is approximate to bi-stable. Therefore, in order to ensure that the system is multi-stable, the range of R is [0.05, 20], that is, the range of the system parameter a is [0.05, 10], and the range of b is [1, 10], c the value range is (0, 0.3), which lays a foundation for parameter synchronization optimization of adaptive multi-stable SR system.
4. Practical Engineering Application
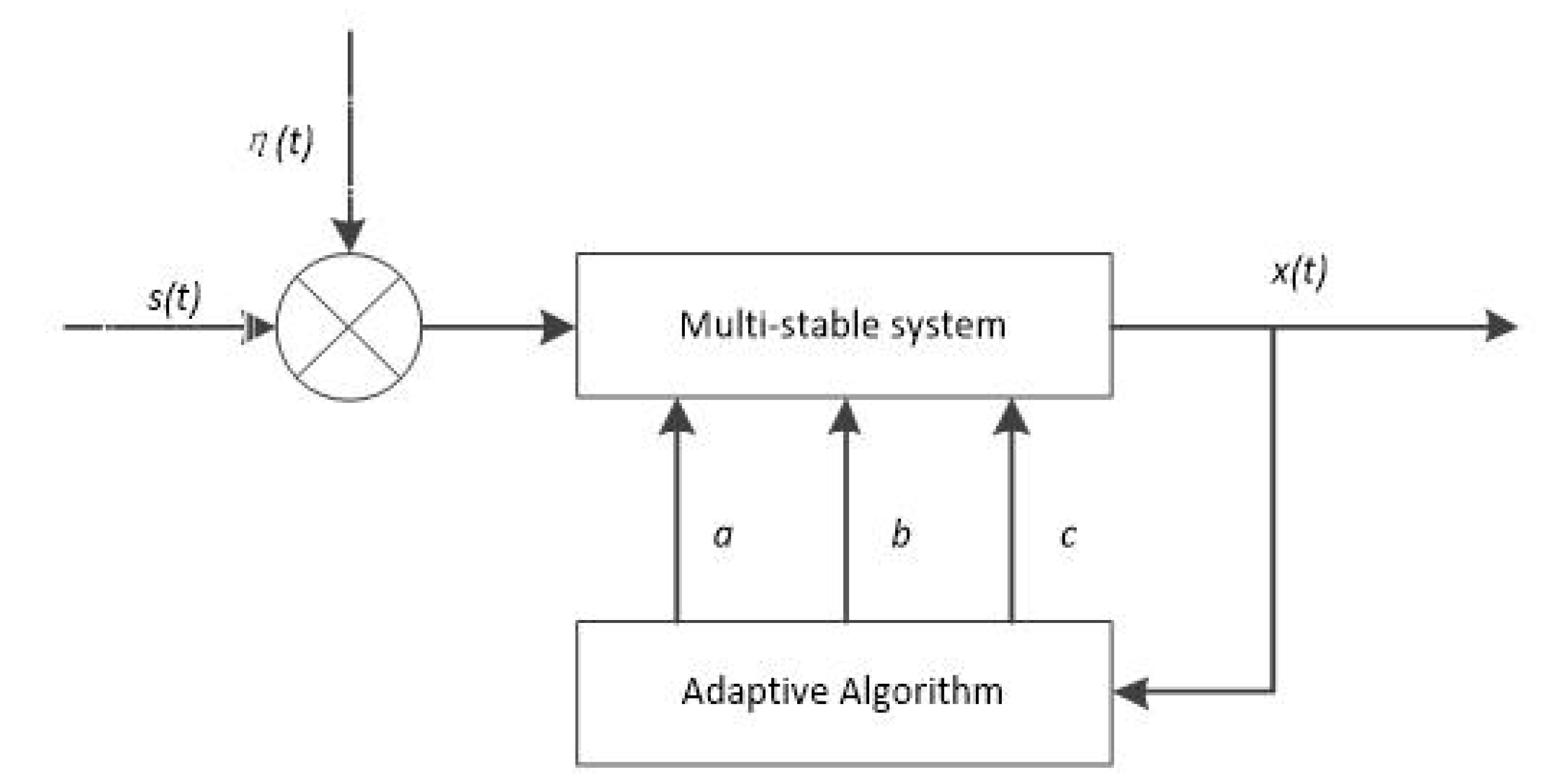
The schematic diagram of the adaptive multi-stationary stochastic resonance structure is shown in
Figure 8. The
parameters of the multi-stable system are updated by analyzing the output signal of the system. The specific workflow is shown in
Figure 9. Firstly, the population of the ant colony algorithm is initialized, and then the initial input is input into the multi-stationary stochastic system. The ant colony algorithm is used to determine whether the SNR signal-to-noise ratio is out of range. The pheromone is evaluated to obtain the optimal
values, even for the optimal solution of the system.
The test platform is shown in
Figure 10a as the “Sailfish” AUV. Through the analysis of the AUV dynamics model, it can be seen that the AUV actuator collision, winding, and other faults directly affect the current parameters, so this paper uses the current data after the AUV collision. A collision failure occurs in the AUV experiment, and the spindle bending phenomenon occurs, as shown in
Figure 10b.
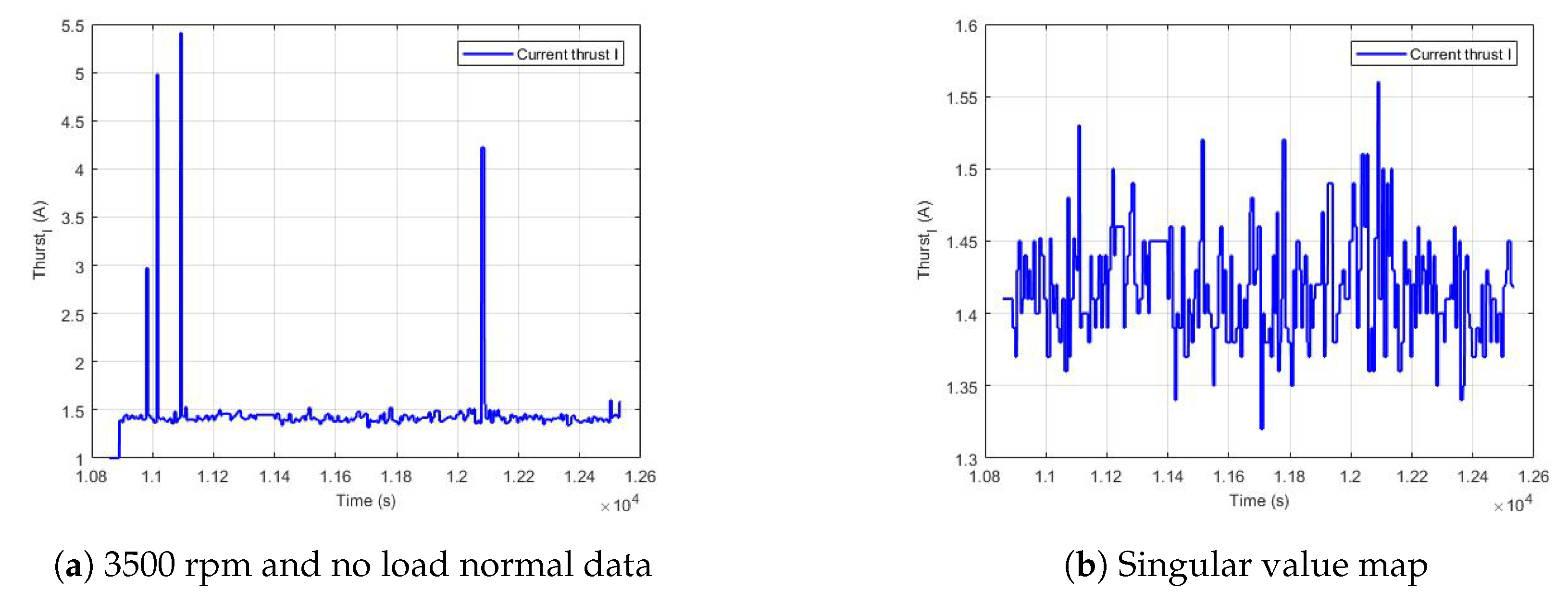
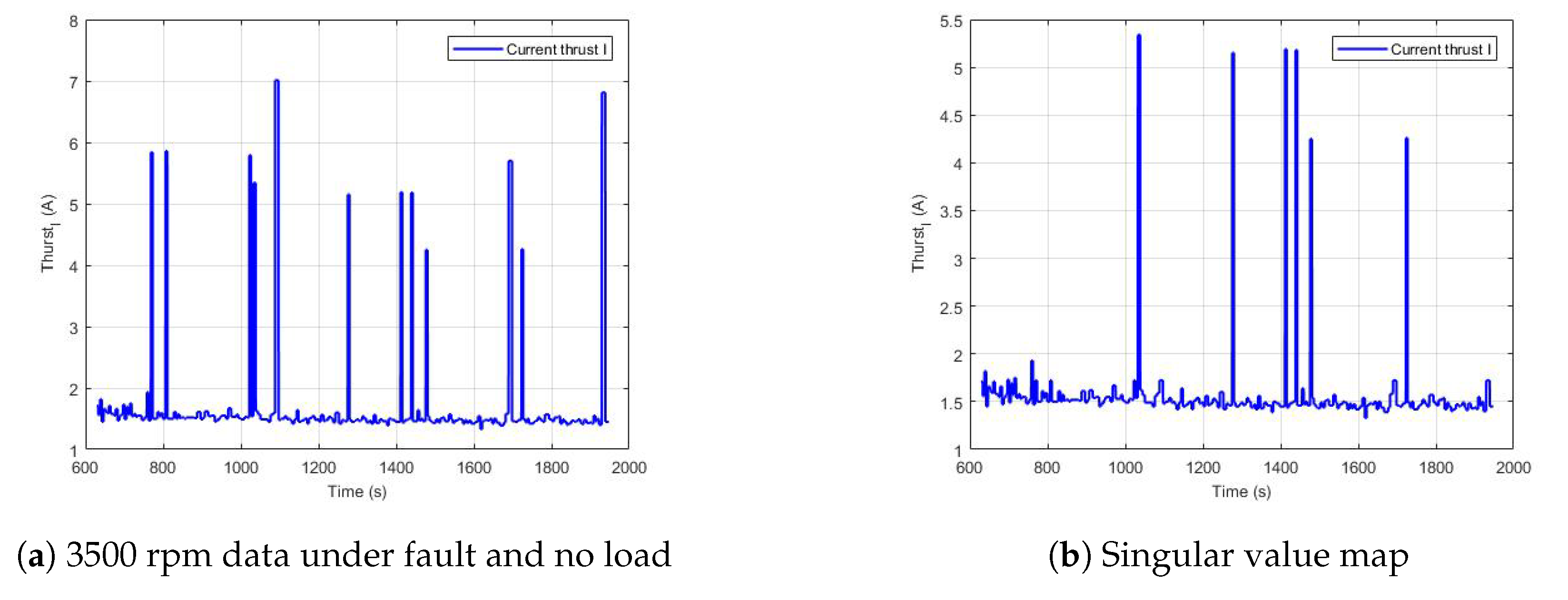
From the experimental data, we can see that the data has unreasonable singular values. It is more appropriate to eliminate the singular value by using the standard deviation method and take four standard deviations. The data for 3500 rpm under normal no load (a) and singular value map (b), and 3500 rpm data under fault no load (c) and singular value map (d) are shown in
Figure 11 and
Figure 12.
From the experimental data, it can be seen that the current increases obviously, and the number of singular values increases obviously after collision, but it is difficult to judge whether the current increases slightly due to fault under normal navigation conditions. The experimental data are used to verify the bi-stable and tri-stable stochastic resonance fault diagnosis. The noise intensity is 0.05, and the noise function is
, where
and
. The fourth-order Runge–Kutta algorithm is used to solve Equation (
26).
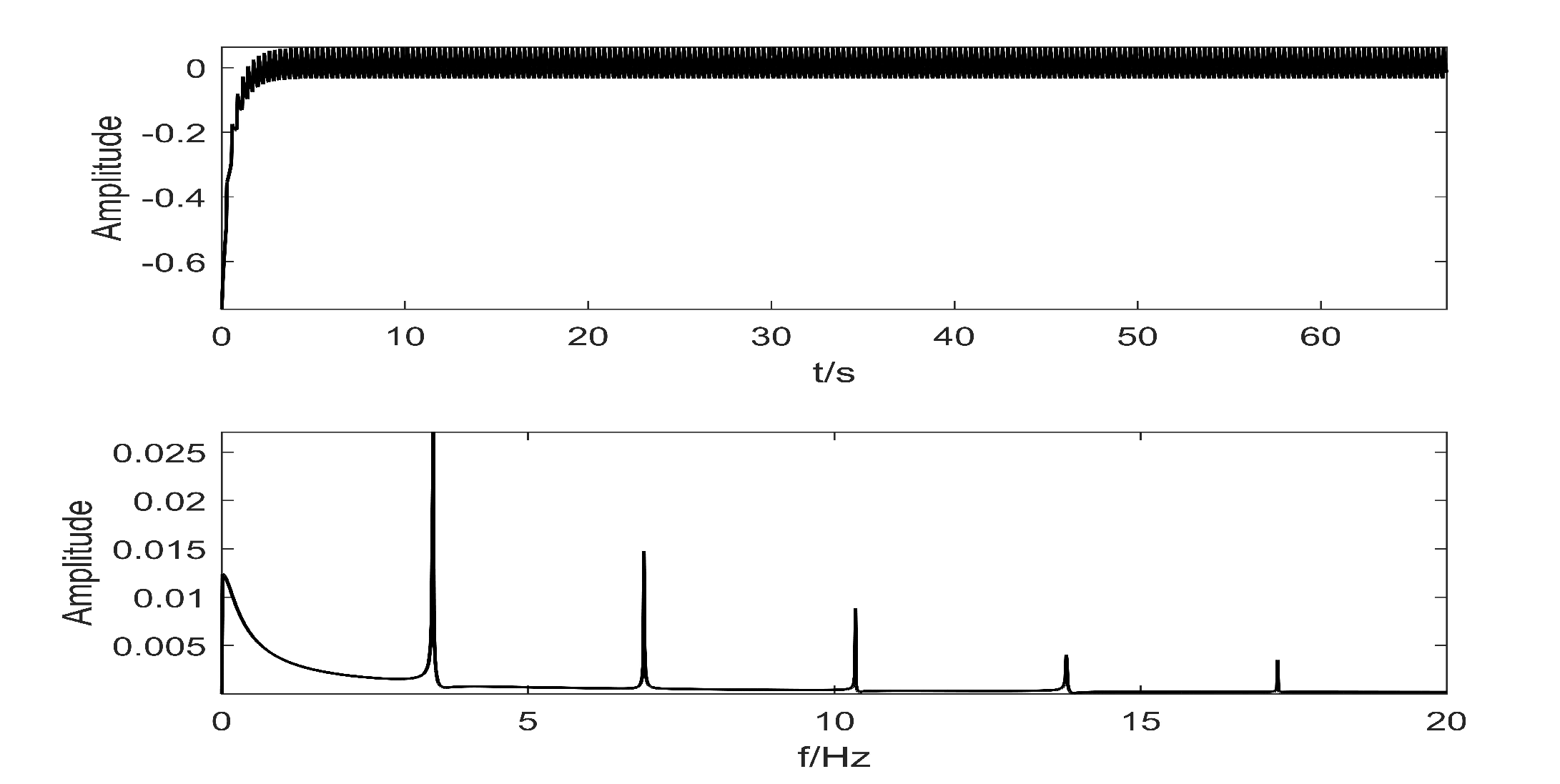
Comparing the spectrum of normal data with fault data, as shown in
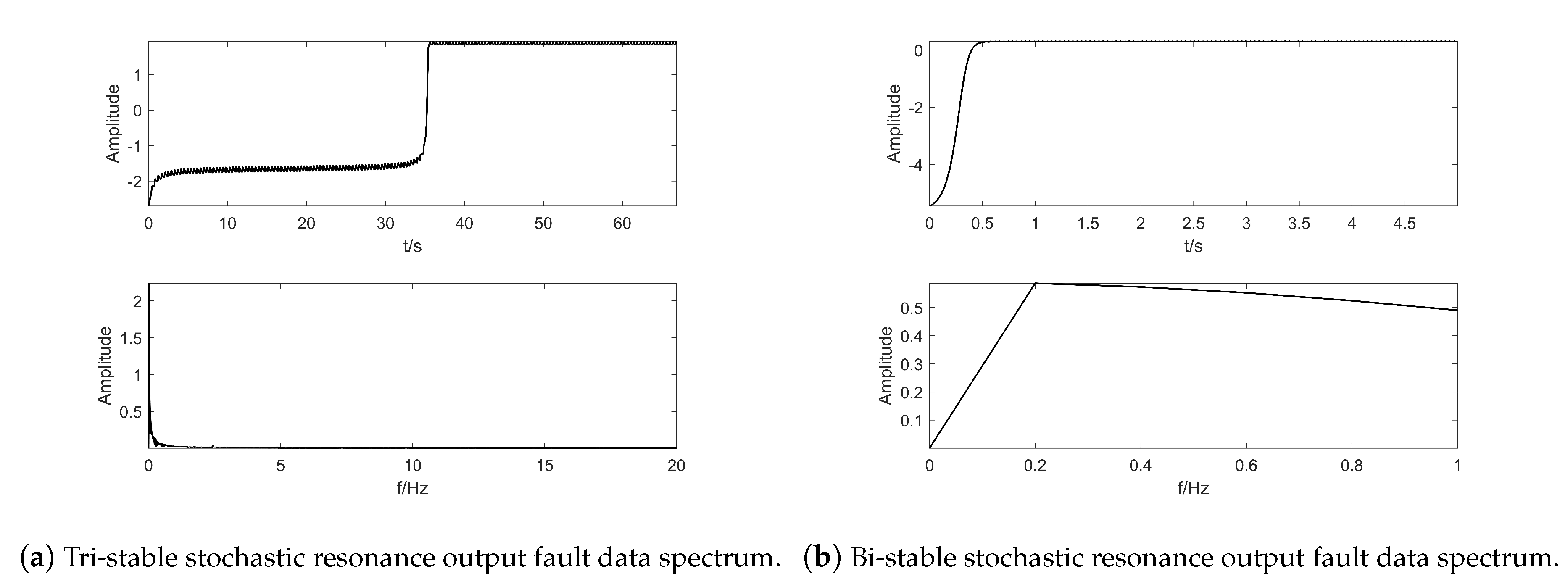
Figure 13, it is found that the difference between the two is small, so it is difficult to determine whether it is faulty. The fault diagnosis using tri-stable and bi-stable is shown in
Figure 14 and
Figure 15. The corresponding values are obtained from the adaptive algorithm of ant colony,
. It can be seen that the tri-stable stochastic resonance has the best diagnostic effect and the highest peak. The normal data is verified under the same parameters. The peak value of the tri-stable system is small, so it can be explained that the system is sensitive to fault signals and insensitive to normal data.
We can see that the bi-stable stochastic resonance part of the signal is submerged in the noise, and the weak fault of collision is not well diagnosed, but the tri-stable system can detect the fault better. Therefore, the effect of the tri-stable system in the collision fault diagnosis of the AUV propeller is better than that of the bi-stable system.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}














