A Machine Learning Method to Estimate Reference Evapotranspiration Using Soil Moisture Sensors


 ,
, 
 and
and 
Abstract
Featured Application
Abstract
1. Introduction
2. Materials and Methods
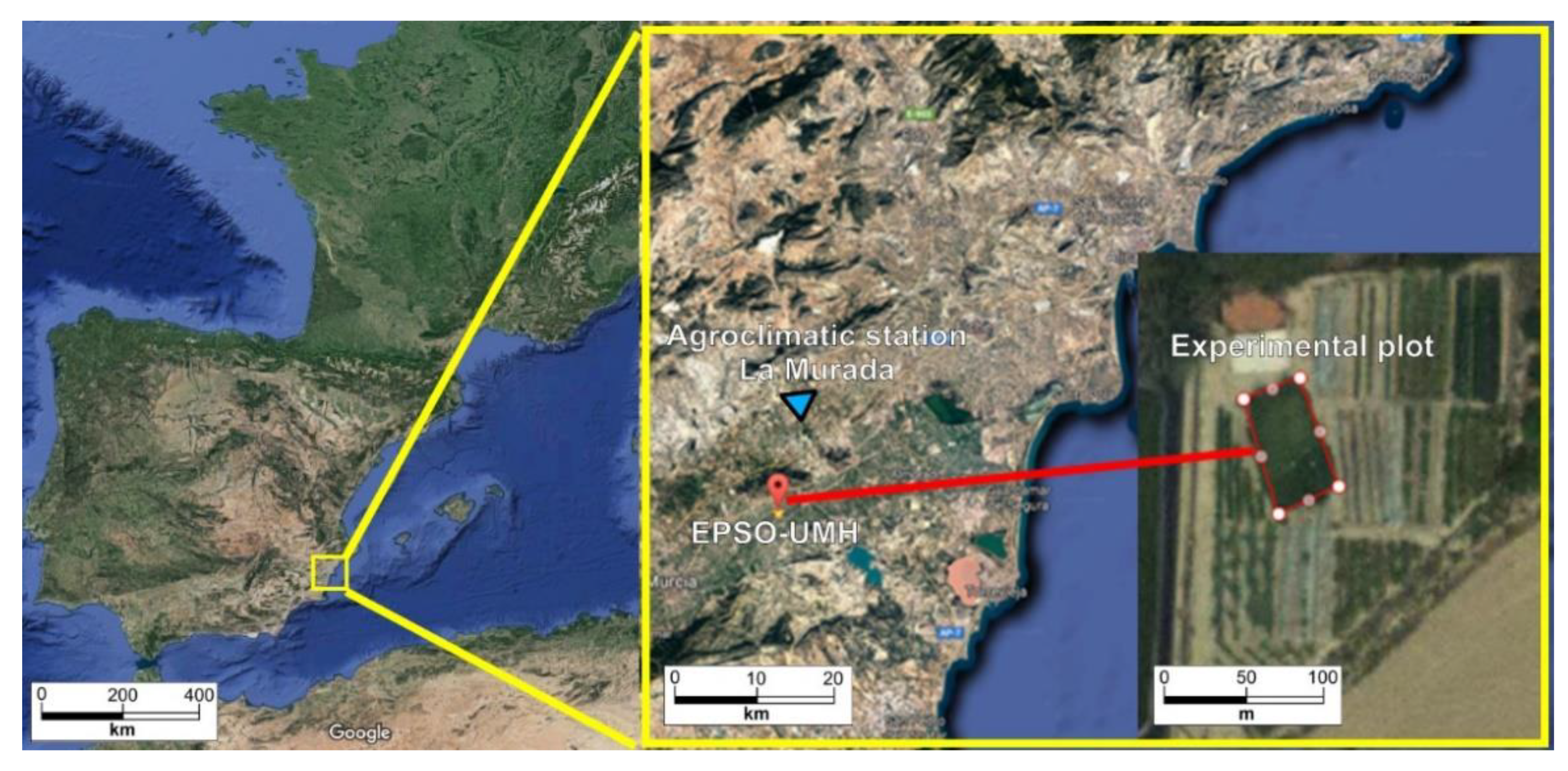
2.1. Data Acquisition
2.2. Data Preparation and Preprocessing
2.3. Regression Algorithms Used
- MATLAB 9 (MathWorks Inc., Natick, MA, USA) was used to validate the regression algorithms based on artificial neural networks (ANNs), since it has a powerful ANN toolkit. Specifically, the models used were classical multilayer perceptron ANNs [41]. These networks consist of several input neurons (one for each input variable), one output neuron (the estimation of ETo), and several hidden layers with some neurons per layer. Different configurations were tested in the experiments.
- R 3.4 (R Foundation, Vienna, Austria) is a free programming language and software environment that is very common in scientific computation and statistical analysis. This tool was used to test the algorithms based on support vector regression (SVR) and regression trees (RT). SVR is an adaptation of support vector machines (SVM) to regression problems [42], where a number of relevant samples are selected from the training set (the support vectors) to minimize the error. Similarly, RTs are an adaptation of decision trees [43], where the intermediate nodes perform decisions based on the input variables, and the terminal nodes contain the predicted output values.
- Weka 3.8.1 (The University of Waikato, Hamilton, New Zealand) is a very popular, complete, and free machine learning tool. It contains many classification and regression algorithms that were included in this research. Some of the main techniques are as follows: linear regression; k-nearest neighbors; Bayes networks; logistic regression; K* algorithm; locally weighted learning; rule-based methods; different types of decision trees. Moreover, some meta-algorithms are included; these are algorithms that use other algorithms as parameters. For example, it is worth mentioning the randomizable filtered classifier (RFC) [44], a variant of the filtered classifier that applies an arbitrary transformation to the input data, and then executes another base algorithm on this transformed input. In this way, the regression accuracy could be greater in the filtered input than in the original one.
2.4. Model Validation Measures
2.5. Remote Image System for the Estimation of the Water Balance
3. Results and Discussion
3.1. Comparison of the Regression Models
- In the case of the RTs, the algorithm used for construction of the decision trees was Classification and Regression Trees (CART) [43]. Figure 5a shows a graphical representation of the tree obtained for dataset (iii). It can be observed that the temperature is a very important variable in the regression, combined with the average information of some sensors.
- For the SVR algorithm, the kernel function was a radial basis function, while the cost parameter was 4, with a value of epsilon 0.03 and gamma 0.1. These values were obtained using the tune function of R, which performs an optimization of the hyperparameters of the algorithm.
- The best architecture found using the ANN for dataset (iii) is shown in Figure 5b. In the three datasets, the network had an input layer, an output layer with one neuron, and a hidden layer. The ANN for dataset (i) had 10 hidden neurons, and the backpropagation algorithm was a scale conjugate gradient; for datasets (ii) and (iii), there were 15 hidden neurons and the backpropagation algorithm was Levenberg–Marquardt. In the training process, the datasets were divided into training (60%), validation (20%), and testing (20%). In this way, consistency was maintained in the comparison with the other regression methods.
- Regarding the regression models tested in Weka, in dataset (i), the best algorithm was M5 Rules, while, for the other two datasets, the best method was the randomizable filtered classifier (RFC). M5 Rules is an algorithm that uses a separate-and-conquer strategy to construct a list of decisions or rules [45]. In the case of the RFC, the filter applied to the input data is a random projection to a sub-space of less dimensionality, and the base method of RFC is the K* algorithm [46]. This K* (or K-star) algorithm is an instance-based regressing method, where the estimation for a given input is calculated from samples more similar to it, according to a certain similarity function (normally using entropy-based distance functions). A global blend value of 15 was used in this algorithm.
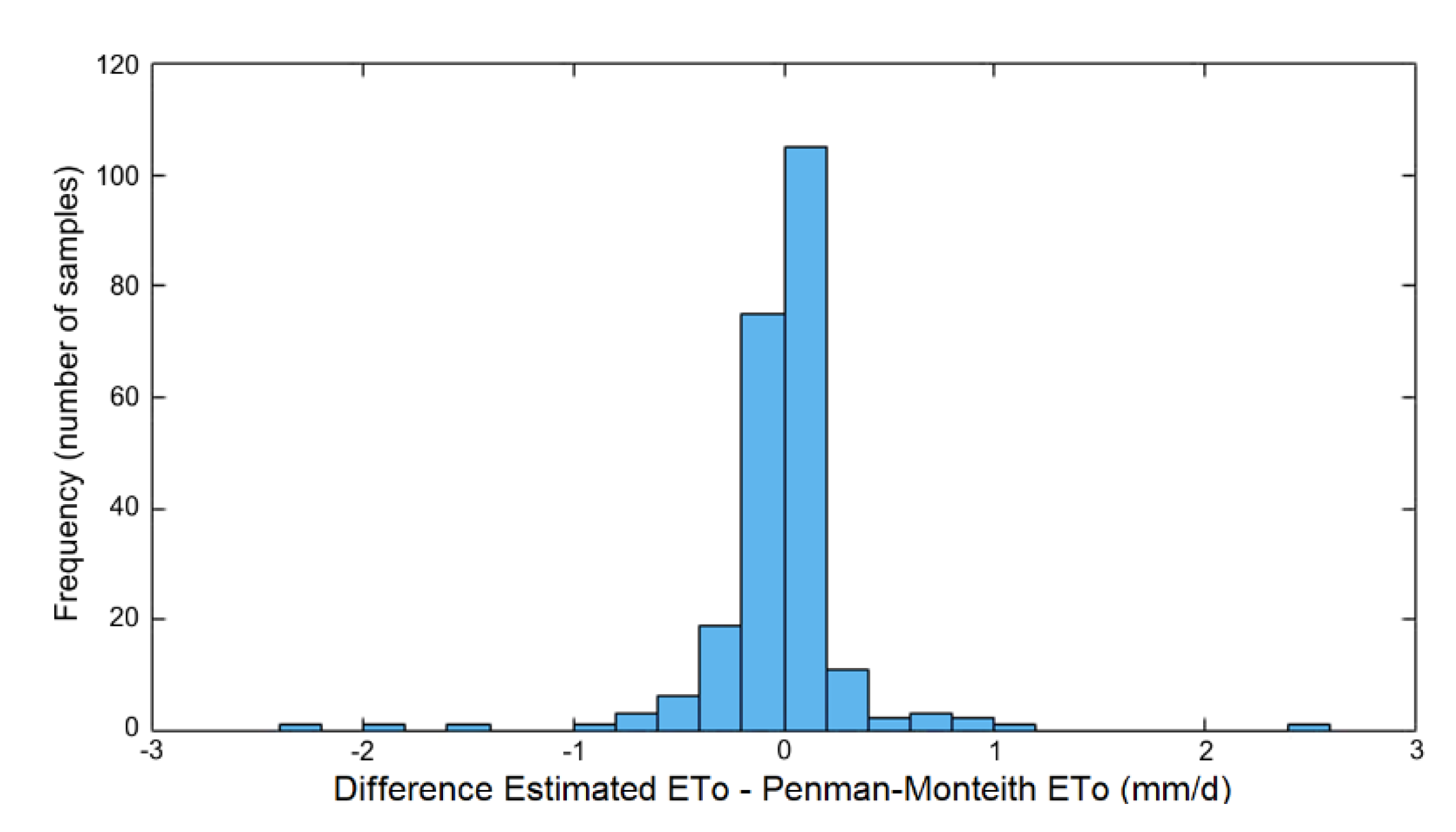
3.2. Accuracy Analysis of the Selected Model
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhao, J.; Huang, S.; Huang, Q.; Leng, G.; Wang, H.; Li, P. Watershed water-energy balance dynamics and their association with diverse influencing factors at multiple time scales. Sci. Total Environ. 2020, 711, 135189. [Google Scholar] [CrossRef]
- Ramos, T.B.; Simionesei, L.; Jauch, E.; Almeida, C.; Neves, R. Modelling soil water and maize growth dynamics influenced by shallow groundwater conditions in the Sorraia Valley region, Portugal. Agric. Water Manag. 2017, 185, 27–42. [Google Scholar] [CrossRef]
- Albaugh, J.M.; Domec, J.C.; Maier, C.A.; Sucre, E.B.; Leggett, Z.H.; King, J.S. Gas exchange and stand-level estimates of water use and gross primary productivity in an experimental pine and switchgrass intercrop forestry system on the Lower Coastal Plain of North Carolina, U.S.A. Agric. For. Meteorol. 2014, 192, 27–40. [Google Scholar] [CrossRef]
- Filippucci, P.; Tarpanelli, A.; Massari, C.; Serafini, A.; Strati, V.; Alberi, M.; Raptis, K.G.C.; Mantovani, F.; Brocca, L. Soil moisture as a potential variable for tracking and quantifying irrigation: A case study with proximal gamma-ray spectroscopy data. Adv. Water Resour. 2020, 136, 103502. [Google Scholar] [CrossRef]
- Hosseini, M.; McNairn, H. Using multi-polarization C- and L-band synthetic aperture radar to estimate biomass and soil moisture of wheat fields. Int. J. Appl. Earth Obs. Geoinf. 2017, 58, 50–64. [Google Scholar] [CrossRef]
- Vienken, T.; Reboulet, E.; Leven, C.; Kreck, M.; Zschornack, L.; Dietrich, P. Field comparison of selected methods for vertical soil water content profiling. J. Hydrol. 2013, 501, 205–212. [Google Scholar] [CrossRef]
- Sena-Lozoya, E.B.; González-Escobar, M.; Gómez-Arias, E.; González-Fernández, A.; Gómez-Ávila, M. Seismic exploration survey northeast of the Tres Virgenes Geothermal Field, Baja California Sur, Mexico: A new Geothermal prospect. Geothermics 2020, 84, 101743. [Google Scholar] [CrossRef]
- Linck, R.; Fassbinder, J.W.E. Determination of the influence of soil parameters and sample density on ground-penetrating radar: A case study of a Roman picket in Lower Bavaria. Archaeol. Anthropol. Sci. 2014, 6, 93–106. [Google Scholar] [CrossRef]
- Banerjee, K.; Krishnan, P. Normalized Sunlit Shaded Index (NSSI) for characterizing the moisture stress in wheat crop using classified thermal and visible images. Ecol. Indic. 2020, 110, 105947. [Google Scholar] [CrossRef]
- Fatás, E.; Vicente, J.; Latorre, B.; Lera, F.; Viñals, V.; López, M.V.; Blanco, N.; Peña, C.; González-Cebollada, C.; Moret-Fernández, D. TDR-LAB 2.0 Improved TDR Software for Soil Water Content and Electrical Conductivity Measurements. Procedia Environ. Sci. 2013, 19, 474–483. [Google Scholar] [CrossRef][Green Version]
- Chen, L.; Zhangzhong, L.; Zheng, W.; Yu, J.; Wang, Z.; Wang, L.; Huang, C. Data-driven calibration of soil moisture sensor considering impacts of temperature: A case study on FDR sensors. Sensors 2019, 19, 4381. [Google Scholar] [CrossRef] [PubMed]
- Oates, M.J.; Ramadan, K.; Molina-Martínez, J.M.; Ruiz-Canales, A. Automatic fault detection in a low cost frequency domain (capacitance based) soil moisture sensor. Agric. Water Manag. 2017, 183, 41–48. [Google Scholar] [CrossRef]
- Al-Asadi, R.A.; Mouazen, A.M. Combining frequency domain reflectometry and visible and near infrared spectroscopy for assessment of soil bulk density. Soil Tillage Res. 2014, 135, 60–70. [Google Scholar] [CrossRef]
- Wiedenfeld, R.P. Water stress during different sugarcane growth periods on yield and response to N fertilization. Agric. Water Manag. 2000, 43, 173–182. [Google Scholar] [CrossRef]
- Ratnakumar, P.; Khan, M.I.R.; Minhas, P.S.; Farooq, M.A.; Sultana, R.; Per, T.S.; Deokate, P.P.; Khan, N.A.; Singh, Y.; Rane, J. Can plant bio-regulators minimize crop productivity losses caused by drought, salinity and heat stress? An integrated review. J. Appl. Bot. Food Qual. 2016, 89, 113–125. [Google Scholar]
- Osman, H.; Ammar, M.; El-Said, M. Optimal scheduling of water network repair crews considering multiple objectives. J. Civ. Eng. Manag. 2017, 23, 28–36. [Google Scholar] [CrossRef]
- Al-Karadsheh, E. Precision Irrigation: New strategy irrigation water management. In Proceedings of the Conference on International Agricultural Research for Development, Deutscher Tropentag, Wiltzenhausen, Germany, 9–11 October 2002; pp. 1–7. [Google Scholar]
- Evans, R.G.; Buchleiter, G.W.; Sadler, E.J.; King, B.A.; Harting, G.B. Controls for precision irrigation with self propelled systems. In Proceedings of the 4th Decennial Symposium, Phoenix, AZ, USA, 14–16 November 2000. [Google Scholar]
- Sadler, E.J.; Evans, R.G.; Stone, K.C.; Camp, C.R. Opportunities for conservation with precision irrigation. J. Soil Water Conserv. 2005, 60, 371–379. [Google Scholar]
- Allen, R.G.; Pereira, L.S.; Raes, D.; Smith, M. Crop evapotranspiration—Guidelines for computing crop water requirements—FAO Irrigation and drainage paper 56; FAO—Food and Agriculture Organization of the United Nations: Rome, Italy, 1998; ISBN 92-5-104219-5. [Google Scholar]
- Doorenboos, J.; Pruitt, W.O. Guidelines for Predicting Crop Water Requirements, Irrigation and Drainage Paper 24; Food and Agriculture Organization of the United Nations: Rome, Italy, 1977; ISBN 92-5-100279-7. [Google Scholar]
- Aydin, Y. Determination of reference ETo by using different Kp equations based on class a pan evaporation in southeastern anatolia project (GAP) region. Appl. Ecol. Environ. Res. 2019, 17, 15117–15129. [Google Scholar]
- Kato, T.; Kamichika, M. Determination of a crop coefficient for evapotranspiration in a sparse sorghum field. Int. Comm. Irrig. Drain. 2006, 55, 165–175. [Google Scholar] [CrossRef]
- Crago, R.; Brutsaert, W. Daytime evaporation and the self-preservation of the evaporative fraction and the Bowen ratio. J. Hydrol. 1996, 178, 241–255. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, Z.X.; Yu, T.; Huang, X.Z.; Gu, X.F. Agricultural remote sensing big data: Management and applications. J. Integr. Agric. 2018, 17, 1915–1931. [Google Scholar] [CrossRef]
- Mogili, U.R.; Deepak, B.B.V.L. Review on Application of Drone Systems in Precision Agriculture. Procedia Comput. Sci. 2018, 133, 502–509. [Google Scholar] [CrossRef]
- Maes, W.H.; Steppe, K. Perspectives for Remote Sensing with Unmanned Aerial Vehicles in Precision Agriculture. Trends Plant Sci. 2019, 24, 152–164. [Google Scholar] [CrossRef] [PubMed]
- Xie, Y.; Sha, Z.; Yu, M. Remote sensing imagery in vegetation mapping: A review. J. Plant Ecol. 2008, 1, 9–23. [Google Scholar] [CrossRef]
- Sharma, H.; Shukla, M.K.; Bosland, P.W.; Steiner, R. Soil moisture sensor calibration, actual evapotranspiration, and crop coefficients for drip irrigated greenhouse chile peppers. Agric. Water Manag. 2017, 179, 81–91. [Google Scholar] [CrossRef]
- Vázquez, N.; Huete, J.; Pardo, A.; Suso, M.L.; Tobar, V. Use of soil moisture sensors for automatic high frequency drip irrigation in processing tomato. In Proceedings of the XXVIII International Horticultural Congress on Science and Horticulture for People (IHC2010): International Symposium on 922, Lisbon, Portugal, 22–27 August 2010; pp. 229–235. [Google Scholar]
- Shedd, M.; Dukes, M.D.; Miller, G.L. Evaluation of evapotranspiration and soil moisture-based irrigation control on turfgrass. In Proceedings of the World Environmental and Water Resources Congress 2007: Restoring Our Natural Habitat, Tampa, FL, USA, 15–19 May 2007; pp. 1–21. [Google Scholar]
- O’Connell, N.V.; Snyder, R.L. Monitoring soil moisture with inexpensive dialectric sensors (Echoprobe) in a citrus orchard under low volume irrigation. In Proceedings of the IV International Symposium on Irrigation of Horticultural Crops 664, Davis, CA, USA, 1–6 September 2003; pp. 445–451. [Google Scholar]
- Thompson, R.B.; Gallardo, M.; Valdez, L.C.; Fernández, M.D. Using plant water status to define threshold values for irrigation management of vegetable crops using soil moisture sensors. Agric. Water Manag. 2007, 88, 147–158. [Google Scholar] [CrossRef]
- Carlson, T.N.; Petropoulos, G.P. A new method for estimating of evapotranspiration and surface soil moisture from optical and thermal infrared measurements: The simplified triangle. Int. J. Remote Sens. 2019, 40, 7716–7729. [Google Scholar] [CrossRef]
- Krishna, P.R. Evapotranspiration and agriculture—A review. Agric. Rev. 2019, 40, 1–11. [Google Scholar]
- Niu, H.; Zhao, T.; Wang, D.; Chen, Y. Estimating Evapotranspiration with UAVs in Agriculture: A Review. In Proceedings of the 2019 ASABE Annual International Meeting; American Society of Agricultural and Biological Engineers, Boston, MA, USA, 7–10 July 2019; p. 1. [Google Scholar]
- Escarabajal-Henarejos, D.; Molina-Martínez, J.M.; Fernández-Pacheco, D.G.; Cavas-Martínez, F.; García-Mateos, G. Digital photography applied to irrigation management of Little Gem lettuce. Agric. Water Manag. 2015, 151, 148–157. [Google Scholar] [CrossRef]
- García-Mateos, G.; Hernández-Hernández, J.L.; Escarabajal-Henarejos, D.; Jaén-Terrones, S.; Molina-Martínez, J.M. Study and comparison of color models for automatic image analysis in irrigation management applications. Agric. Water Manag. 2015, 151, 158–166. [Google Scholar] [CrossRef]
- Mateo-Aroca, A.; García-Mateos, G.; Ruiz-Canales, A.; Molina-García-Pardo, J.M.; Molina-Martínez, J.M. Remote Image Capture System to Improve Aerial Supervision for Precision Irrigation in Agriculture. Water 2019, 11, 255. [Google Scholar] [CrossRef]
- Barton, L.; Wan, G.G.Y.; Buck, R.P.; Colmer, T.D. Nitrogen increases evapotranspiration and growth of a warm-season turfgrass. Agron. J. 2009, 101, 17–24. [Google Scholar] [CrossRef]
- Baum, E.B. On the capabilities of multilayer perceptrons. J. Complex. 1988, 4, 193–215. [Google Scholar] [CrossRef]
- Drucker, H.; Burges, C.J.C.; Kaufman, L.; Smola, A.J.; Vapnik, V. Support vector regression machines. In Proceedings of the Advances in Neural Information Processing Systems, Denver, CO, USA, 5 May 1997; pp. 155–161. [Google Scholar]
- Breiman, L. Classification and Regression Trees; Routledge: Abingdon, UK, 2017; ISBN 1351460498. [Google Scholar]
- Pak, I.; Teh, P.L. Machine learning classifiers: Evaluation of the performance in online reviews. Indian J. Sci. Technol. 2016, 9, 1–9. [Google Scholar] [CrossRef]
- Holmes, G.; Hall, M.; Prank, E. Generating rule sets from model trees. In Proceedings of the Australasian Joint Conference on Artificial Intelligence, Sydney, NSW, Australia, 6–10 December 1999; pp. 1–12. [Google Scholar]
- Painuli, S.; Elangovan, M.; Sugumaran, V. Tool condition monitoring using K-star algorithm. Expert Syst. Appl. 2014, 41, 2638–2643. [Google Scholar] [CrossRef]
- Kumar, M.; Raghuwanshi, N.S.; Singh, R.; Wallender, W.W.; Pruitt, W.O. Estimating evapotranspiration using artificial neural network. J. Irrig. Drain. Eng. 2002, 128, 224–233. [Google Scholar] [CrossRef]
- Zanetti, S.S.; Sousa, E.F.; Oliveira, V.P.; Almeida, F.T.; Bernardo, S. Estimating evapotranspiration using artificial neural network and minimum climatological data. J. Irrig. Drain. Eng. 2007, 133, 83–89. [Google Scholar] [CrossRef]
- Glenn, E.P.; Nagler, P.L.; Huete, A.R. Vegetation index methods for estimating evapotranspiration by remote sensing. Surv. Geophys. 2010, 31, 531–555. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | 0–10 cm | 10–20 cm | 20–30 cm |
|---|---|---|---|
| Sand (%) | 45 | 61 | 75 |
| Silt (%) | 30 | 22 | 16 |
| Clay (%) | 25 | 17 | 9 |
| Water field capacity (m3/m3) | 0.27 | 0.22 | 0.18 |
| Permanent wilting point (m3/m3) | 0.15 | 0.12 | 0.08 |
| Algorithm | (i) Daily Data | (ii) Data at 6-h Intervals | (iii) Data at 6-h Intervals without Sensor 3 |
|---|---|---|---|
| RT | 0.7000 | 0.6700 | 0.6600 |
| Best Weka model | 0.4973 | 0.3567 | 0.1829 |
| SVR | 0.5354 | 0.4994 | 0.4043 |
| ANN | 0.5481 | 0.3037 | 0.2972 |
| Algorithm | RMSE | MAE | MRE | R |
|---|---|---|---|---|
| RFC + K* | 0.1829 | 0.0899 | 6.52% | 0.9936 |
| ANN | 0.2972 | 0.1521 | 11.03% | 0.9470 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fernández-López, A.; Marín-Sánchez, D.; García-Mateos, G.; Ruiz-Canales, A.; Ferrández-Villena-García, M.; Molina-Martínez, J.M. A Machine Learning Method to Estimate Reference Evapotranspiration Using Soil Moisture Sensors. Appl. Sci. 2020, 10, 1912. https://doi.org/10.3390/app10061912
Fernández-López A, Marín-Sánchez D, García-Mateos G, Ruiz-Canales A, Ferrández-Villena-García M, Molina-Martínez JM. A Machine Learning Method to Estimate Reference Evapotranspiration Using Soil Moisture Sensors. Applied Sciences. 2020; 10(6):1912. https://doi.org/10.3390/app10061912
Chicago/Turabian StyleFernández-López, Antonio, Daniel Marín-Sánchez, Ginés García-Mateos, Antonio Ruiz-Canales, Manuel Ferrández-Villena-García, and José Miguel Molina-Martínez. 2020. "A Machine Learning Method to Estimate Reference Evapotranspiration Using Soil Moisture Sensors" Applied Sciences 10, no. 6: 1912. https://doi.org/10.3390/app10061912
APA StyleFernández-López, A., Marín-Sánchez, D., García-Mateos, G., Ruiz-Canales, A., Ferrández-Villena-García, M., & Molina-Martínez, J. M. (2020). A Machine Learning Method to Estimate Reference Evapotranspiration Using Soil Moisture Sensors. Applied Sciences, 10(6), 1912. https://doi.org/10.3390/app10061912