Deep Neural Network for Predicting Ore Production by Truck-Haulage Systems in Open-Pit Mines



Abstract
1. Introduction
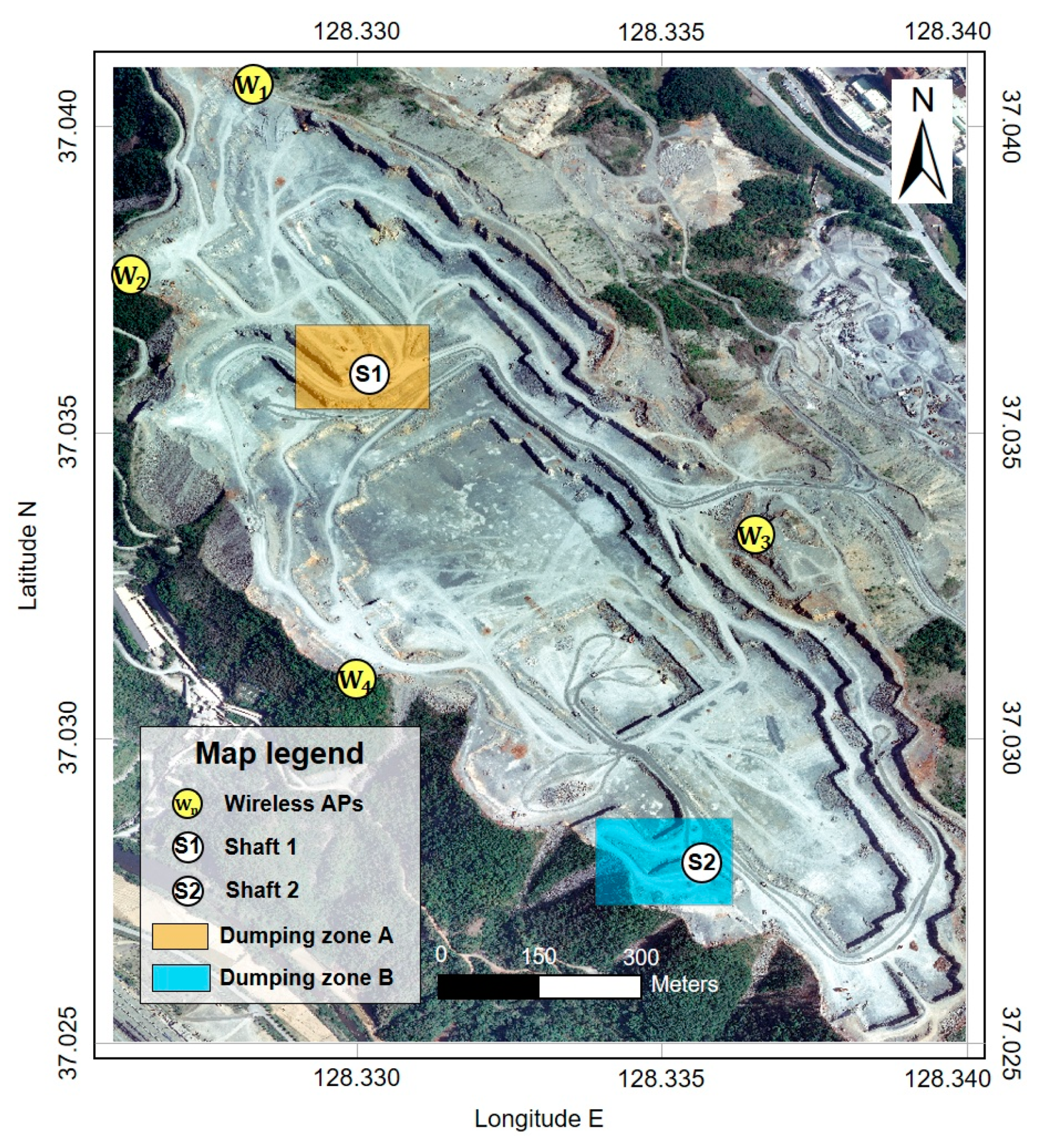
2. Study Area
3. Methods
3.1. DNN Prediction
3.2. Design of DNN Model
3.3. Data Preparation for DNN Model
- First, all incident packet data were preprocessed. Subsequently, packet data sent from the third wireless AP (AP3) were extracted along with truck-tag recognition data. All hexadecimal values were converted to decimal.
- Packet data recorded during valid operation time intervals were subsequently sampled. Operation time intervals were set to 30, 60, 90, 120, 150, 180, and 210 min with incremental shifts of 2-min each to consider probable cases covering the period from 0 to 210 min. For example, if the operation time interval equaled 30 min, 91 probable cases, such as 0–30, 2–32, 4–34, and 180–210 min, can be considered during the morning session.
- Extracted packet data were classified according to the truck-tag ID, and dumping-zone utilization of the trucks was calculated. The dumping-zone utilization of zone A by 45-ton trucks was calculated as the ratio of the number of dumping-zone-A visits to the sum of dumping-zone-A and dumping-zone-B visits (refer to Equation (4)). If trucks remained inside a dumping zone for more than 1 min (can be calculated by comparing the latitude and longitude coordinates of a truck recorded as packet data with dumping-zone coordinates), the number of dumping-zone visits made by a truck was increased by one. In Equation (4), and denote dumping zone A and B utilizations, respectively, by the 45-ton trucks, whereas denote the number of visits made by 45-ton trucks to dumping zones A and B, respectively.
- The average stay and travel times of trucks inside and outside the dumping zone, respectively, were also calculated. Equation (5) calculates the average stay time () of all trucks inside dumping zone A. Here, , , represent the sum of the dumping zone A stay times corresponding to the 45-, 60-, and 84-ton trucks, respectively. Equation (6) calculates the average travel time () of all trucks using dumping zone A. In this equation, , , represent the sum of travel times corresponding to the 45-, 60-, and 84-ton trucks, respectively, using dumping zone A.
- The amount of ore produced during a given operation time was calculated by multiplying the loading capacity of each truck with the number of visits it made to the dumping zone (refer to Equation (7)).
- Finally, all calculated values were saved in a training-data format, the next operation-time interval was set, and the above process was repeated 2–5 times.
3.4. Statistical Analysis of Training Data
3.5. Experimental Setup for DNN Model Training
3.6. Inference Using DNN Model
4. Results
4.1. Experimental Evaluation of Trained DNN Models
4.2. Inference Drawn Using Optimum DNN Models
5. Discussions
5.1. Real-Time Ore-Production Prediction Using Optimum DNN Models
5.2. Comparison of the DNN and the Multiple Regression Analysis
5.3. Further Study
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Alarie, S.; Gamache, M. Overview of Solution Strategies Used in Truck Dispatching Systems for Open Pit Mines. Int. J. Surf. Min. Reclam. Environ. 2002, 16, 59–76. [Google Scholar] [CrossRef]
- Ercelebi, S.G.; Bascetin, A. Optimization of shovel-truck system for surface mining. J. S. Afr. Inst. Min. Metall. 2009, 109, 433–439. [Google Scholar]
- Salama, A.; Greberg, J. Optimization of Truck-Loader Haulage System in an Underground Mine: A Simulation Approach using SimMine. In Proceedings of the MassMin 2012: 6th International Conference & Exhibition on Mass Mining, Sudbury, ON, Canada, 10–14 June 2012; Canadian Institute of Mining, Metallurgy and Petroleum: Sudbury, ON, Canada, 2012; pp. 1–10. [Google Scholar]
- Tarshizi, E.; Sturgul, J.; Ibarra, V.; Taylor, D. Simulation and animation model to boost mining efficiency and enviro-friendly in multi-pit operations. Int. J. Min. Sci. Technol. 2015, 25, 671–674. [Google Scholar] [CrossRef]
- Soofastaei, A.; Aminossadati, S.M.; Kizil, M.S.; Knights, P. A discrete-event model to simulate the effect of truck bunching due to payload variance on cycle time, hauled mine materials and fuel consumption. Int. J. Min. Sci. Technol. 2016, 26, 745–752. [Google Scholar] [CrossRef]
- Park, S.; Choi, Y.; Park, H. Optimization of Truck-loader Haulage Systems in an Underground Mine Using Simulation Methods. Geosyst. Eng. 2016, 19, 222–231. [Google Scholar] [CrossRef]
- Upadhyay, S.P.; Askari-nasab, H. Simulation and optimization approach for uncertainty-based short-term planning in open pit mines. Int. J. Min. Sci. Technol. 2018, 28, 153–166. [Google Scholar] [CrossRef]
- Samanta, B.; Sarkar, B.; Mukherjee, S.K. Selection of opencast mining equipment by a multi-criteria decision-making process. Min. Technol. 2002, 111, 136–142. [Google Scholar] [CrossRef]
- Fadin, A.Y.F.; Moeis, A.O. Simulation-optimization truck dispatch problem using look-ahead algorithm in open pit mines. Int. J. Geomate 2017, 13, 80–86. [Google Scholar] [CrossRef]
- Sembakutti, D.; Kumral, M.; Sasmito, A.P. Analysing equipment allocation through queuing theory and Monte-Carlo simulations in surface mining operations. Int. J. Min. Miner. Eng. 2017, 8, 56–69. [Google Scholar] [CrossRef]
- Choi, Y.; Park, H.D.; Sunwoo, C.; Clarke, K.C. Multi-criteria evaluation and least-cost path analysis for optimal haulage routing of dump trucks in large scale open-pit mines. Int. J. Geogr. Inf. Sci. 2009, 23, 1541–1567. [Google Scholar] [CrossRef]
- Afrapoli, A.M.; Askari-Nasab, H. Mining fleet management systems: A review of models and algorithms. Int. J. Min. Reclam. Environ. 2019, 33, 42–60. [Google Scholar] [CrossRef]
- Soumis, F.; Ethier, J.; Elbrond, J. Evaluation of the New Truck Dispatching in the Mount Wright Mine. In Proceedings of the 21th International Symposium on Application of Computers and Operations Research in the Mineral Industry (APCOM 1989), Las Vegas, NV, USA, 27 February–2 March 1989; Weiss, A., Ed.; The Society for Mining Metallurgy: Littleton, CO, USA, 1989; pp. 674–682. [Google Scholar]
- Ta, C.H.; Ingolfsson, A.; Doucette, J. A linear model for surface mining haul truck allocation incorporating shovel idle probabilities. Eur. J. Oper. Res. 2013, 231, 770–778. [Google Scholar] [CrossRef]
- Chang, Y.; Ren, H.; Wang, S. Modelling and Optimizing an Open-Pit Truck Scheduling Problem. Discret. Dyn. Nat. Soc. 2015, 2015. [Google Scholar] [CrossRef]
- Koenigsberg, E. Cyclic queues. J. Oper. Res. Soc. 1958, 9, 22–35. [Google Scholar] [CrossRef]
- Carmichael, D.G. Engineering Queues in Construction and Mining; John Wiley & Sons: Hoboken, NJ, USA, 1987; ISBN 978-0132781442. [Google Scholar]
- Kappas, G.; Yegulalp, T.M. An application of closed queueing networks theory in truck-shovel systems. Int. J. Surf. Min. Reclam. Environ. 1991, 5, 45–51. [Google Scholar] [CrossRef]
- Xi, Y.; Yegulalp, T.M. Optimum Dispatching Algorithms for Anshan open Pit Mine. In Proceedings of the 24th International Symposium on Application of Computers and Operations Research in the Mineral Industry (APCOM 1993), Montreal, QC, Canada, 31 October–3 November 1993; Canadian Institute of Mining, Metallurgy and Petroleum: Westmount, QC, Canada, 1993; pp. 426–433. [Google Scholar]
- Bonates, E.J.L. The Development of Assignment Procedures for Semi-Automated Truck/Shovel Systems. Ph.D. Thesis, McGill University, Montreal, QC, Canada, 1992. [Google Scholar]
- Gurgur, C.Z.; Dagdelen, K.; Artittong, S. Optimization of a real-time multi-period truck dispatching system in mining operations. Int. J. Appl. Decis. Sci. 2011, 4, 57–79. [Google Scholar] [CrossRef]
- Mena, R.; Zio, E.; Kristjanpoller, F.; Arata, A. Availability-based simulation and optimization modeling framework for open-pit mine truck allocation under dynamic constraints. Int. J. Min. Sci. Technol. 2013, 23, 113–119. [Google Scholar] [CrossRef]
- Temeng, V.A.; Otuonye, F.O.; Frendewey, J.O. A non preemptive goal programming approach to truck dispatching in open pit mines. Miner. Resour. Eng. 1998, 7, 59–67. [Google Scholar] [CrossRef]
- Ta, C.H.; Kresta, J.V.; Forbes, J.F. A Stochastic Optimization Approach to Mine Truck Allocation. Int. J. Surf. Min. Reclam. Environ. 2006, 19, 162–175. [Google Scholar] [CrossRef]
- Li, Z. A methodology for the optimum control of shovel and truck operations in open-pit mining. Min. Sci. Technol. 1990, 10, 337–340. [Google Scholar] [CrossRef]
- Lizotte, Y.; Bonates, E.; Leclerc, A. A Design and Implementation of a Semi-Automated Truck/Shovel Dispatching System. In Proceedings of the 20th International Symposium on Application of Computers and Operations Research in the Mineral Industry (APCOM 1987), Johannesburg, South Africa, 19–23 October 1987; Lemmer, I.C., Schaum, H., Camisani-Calzolari, F.A.G.M., Eds.; South African Institute of Mining and Metallurgy: Johannesburg, South Africa, 1987; pp. 377–387. [Google Scholar]
- Temeng, V.A.; Otuonye, F.O.; Frendewey, J.O., Jr. Real-time truck dispatching using a transportation algorithm. Int. J. Surf. Min. Reclam. Environ. 2007, 11, 203–207. [Google Scholar] [CrossRef]
- Modular Mining Systems’ DISPATCH®. Available online: https://www.modularmining.com/case-studies/dispatch-fms-helps-mine-optimize-haulage-cycle/ (accessed on 10 October 2019).
- Caterpillar’s CAT® MINESTAR™. Available online: https://www.cat.com/en_US/by-industry/mining/mining-solutions/technology-new.html (accessed on 10 October 2019).
- Nieto, A.; Dagdelen, K. Development and Testing of a Vehicle Collision Avoidance System Based on GPS and Wireless Networks for Open-Pit Mines. In Proceedings of the 31st International Symposium on Application of Computers and Operations Research in the Mineral Industry (APCOM), Cape Town, South Africa, 14–16 May 2003; Camisani-Calzolari, F.R., Ed.; South African Institute of Mining and Metallurgy: Johannesburg, South Africa, 2003; pp. 1–13. [Google Scholar]
- Brown, N.; Kaloustian, S.; Roeckle, M. Monitoring of Open Pit Mines Using Combined GNSS Satellite Receivers and Robotic Total Stations. In Proceedings of the 2007 International Symposium on Rock Slope Stability in Open Pit Mining and Civil Engineering, Perth, Australia, 12–14 September 2007; Potvin, Y., Ed.; Australian Centre for Geomechanics: Crawley, Australia, 2007; pp. 417–429. [Google Scholar]
- Qinghua, G.U.; Caiwu, L.U.; Jinping, G.U.O.; Shigun, J. Dynamic management system of ore blending in an open pit mine based on GIS/GPS/GPRS. Min. Sci. Technol. 2010, 20, 132–137. [Google Scholar] [CrossRef]
- Yang, G.U.I.; Zhi-gang, T.A.O.; Chang-jun, W.; Xing, X.I.E. Study on remote monitoring system for landslide hazard based on Wireless Sensor Network and its application. J. Coal Sci. Eng. 2011, 17, 464–465. [Google Scholar] [CrossRef]
- Vellingiri, S. Energy Efficient Wireless Infrastructure Solution for Open Pit Mine. In Proceedings of the 2013 International Conference on Advances in Computing, Communications and Informatics (ICACCI), Mysore, India, 22–25 August 2013; IEEE: New York, NY, USA, 2013; pp. 1463–1467. [Google Scholar]
- Boulter, A.; Hall, R. Wireless network requirements for the successful implementation of automation and other innovative technologies in open-pit mining. Int. J. Min. Reclam. Environ. 2015, 29, 368–379. [Google Scholar] [CrossRef]
- Barbosa, V.S.B.; Garcia, L.G.U.; Caldwell, G.; Lima, H. The Challenge of Wireless Connectivity to Support Intelligent Mines. In Proceedings of the 24th World Mining Conference (WMC), Rio de Janeiro/RJ, Brazil, 18–21 October 2016; Brazilian Mining Association: Lago Sul, Brazil, 2016; pp. 105–116. [Google Scholar]
- Garcia, L.G.U.; Almeida, E.P.L.; Barbosa, V.S.B.; Caldwell, G.; Rodriguez, I.; Lima, H.; Sørensen, T.B.; Mogensen, P. Mission-Critical Mobile Broadband Communications in Open-Pit Mines. IEEE Commun. Mag. 2016, 54, 62–69. [Google Scholar] [CrossRef][Green Version]
- Baek, J.; Choi, Y. Simulation of Truck Haulage Operations in an Underground Mine Using Big Data from an ICT-Based Mine Safety Management System. Appl. Sci. 2019, 9, 2639. [Google Scholar] [CrossRef]
- Tan, Y.; Chinbat, U.; Miwa, K.; Takakuwa, S. Operations Modeling and Analysis of Open Pit Copper Mining using GPS Tracking Data. In Proceedings of the 2012 Winter Simulation Conference (WSC), Berlin, Germany, 9–12 December 2012; Laroque, C., Himmelspach, J., Pasupathy, R., Rose, O., Uhrmacher, A.M., Eds.; IEEE: New York, NY, USA, 2012; pp. 1309–1320. [Google Scholar]
- Chaowasakoo, P.; Seppälä, H.; Koivo, H.; Zhou, Q. Digitalization of mine operations: Scenarios to benefit in real-time truck dispatching. Int. J. Min. Sci. Technol. 2017, 27, 229–236. [Google Scholar] [CrossRef]
- Blom, M.; Pearce, A.R.; Stuckey, P.J. Short-term planning for open pit mines: A review Short-term planning for open pit mines: A review. Int. J. Min. Reclam. Environ. 2019, 33, 318–339. [Google Scholar] [CrossRef]
- Najafabadi, M.M.; Villanustre, F.; Khoshgoftaar, T.M.; Seliya, N.; Wald, R.; Muharemagic, E. Deep learning applications and challenges in big data analytics. J. Big Data 2015, 2, 1–21. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning (Adaptive Computation and Machine Learning Series); The MIT Press: Cambridge, MA, USA, 2019; pp. 1–800. ISBN 978-0262035613. [Google Scholar]
- Gardner, M.W.; Dorling, S. Artificial neural networks (the multilayer perceptron)—A review of applications in the atmospheric sciences. Atmos. Environ. 1998, 32, 2627–2636. [Google Scholar] [CrossRef]
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef] [PubMed]
- Deng, L. Three Classes of Deep Learning Architectures and Their Applications: A Tutorial Survey. APSIPA Trans. Signal Inf. Process. 2012, 3, 1–28. [Google Scholar]
- Lecun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Fukushima, K. Neocognitron: A Self-Organizing Neural Network Model for a Mechanism of Pattern Recognition Unaffected by Shift in Position. Biol. Cybern. 1980, 36, 193–202. [Google Scholar] [CrossRef]
- Sutskever, I.; Martens, J.; Hinton, G. Generating Text with Recurrent Neural Networks. In Proceedings of the 28th International Conference on Machine Learning, Bellevue, WA, USA, 28 June–2 July 2011; Getoor, L., Scheffer, T., Eds.; Omnipress: Madison, WI, USA, 2011; pp. 1017–1024. [Google Scholar]
- Graves, A.; Mohamed, A.; Hinton, G. Speech Recognition with Deep Recurrent Neural Networks. In Proceedings of the 2013 IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, BC, Canada, 26–31 May 2013; IEEE: New York, NY, USA, 2013; pp. 6645–6649. [Google Scholar]
- Xiong, Y.; Zuo, R. Recognition of geochemical anomalies using a deep autoencoder network. Comput. Geosci. 2016, 86, 75–82. [Google Scholar] [CrossRef]
- Li, W.; Wu, G.; Du, Q. Transferred Deep Learning for Anomaly Detection in Hyperspectral Imagery. IEEE Geosci. Remote Sens. Lett. 2017, 14, 597–601. [Google Scholar] [CrossRef]
- Zhang, S.; Xiao, K.; Carranza, E.J.M.; Yang, F.; Zhao, Z. Computers and Geosciences Integration of auto-encoder network with density-based spatial clustering for geochemical anomaly detection for mineral exploration. Comput. Geosci. 2019, 130, 43–56. [Google Scholar] [CrossRef]
- Brown, W.M.; Gedeon, T.D.; Groves, D.I.; Barnes, R.G. Artificial neural networks: A new method for mineral prospectivity mapping. Aust. J. Earth Sci. 2000, 47, 757–770. [Google Scholar] [CrossRef]
- Leite, E.P.; de Souza Filho, C.R. Artificial neural networks applied to mineral potential mapping for copper-gold mineralizations in the Carajás Mineral Province, Brazil. Geophys. Prospect. 2009, 57, 1049–1065. [Google Scholar] [CrossRef]
- Oh, H.; Lee, S. Application of Artificial Neural Network for Gold-Silver Deposits Potential Mapping: A Case Study of Korea. Nat. Resour. Res. 2010, 19, 103–124. [Google Scholar] [CrossRef]
- Xiong, Y.; Zuo, R.; John, E.; Carranza, M. Mapping mineral prospectivity through big data analytics and a deep learning algorithm. Ore Geol. Rev. 2018, 102, 811–817. [Google Scholar] [CrossRef]
- Soofastaei, A.; Aminossadati, S.M.; Kizil, M.S.; Knights, P. Reducing Fuel Consumption of Haul Trucks in Surface Mines Using Artificial Intelligence Models. In Proceedings of the 2016 Coal Operators’ Conference, Wollongong, NSW, Australia, 10–12 February 2016; Aziz, N., Kininmonth, B., Eds.; The University of Wollongong Printery: Wollongong, Australia, 2019; pp. 477–489. [Google Scholar]
- Xu, J.; Wang, Z.; Tan, C.; Lu, D.; Wu, B.; Su, Z.; Tang, Y. Cutting Pattern Identification for Coal Mining Shearer through Sound Signals Based on a Convolutional Neural Network. Symmetry 2018, 10, 736. [Google Scholar] [CrossRef]
- Jiang, S.; Lian, M.; Lu, C.; Gu, Q.; Ruan, S.; Xie, X. Ensemble Prediction Algorithm of Anomaly Monitoring Based on Big Data Analysis Platform of Open-Pit Mine Slope. Complexity 2018, 2018, 1–13. [Google Scholar] [CrossRef]
- Nguyen, H.; Bui, X. Predicting Blast-Induced Air Overpressure: A Robust Artificial Intelligence System Based on Artificial Neural Networks and Random Forest. Nat. Resour. Res. 2019, 28, 893–907. [Google Scholar] [CrossRef]
- Bewley, A.; Upcroft, B. Background Appearance Modeling with Applications to Visual Object Detection in an Open-Pit Mine. J. Field Robot. 2017, 34, 53–73. [Google Scholar] [CrossRef]
- Mahdevari, S.; Shahriar, K.; Sharifzadeh, M.; Tannant, D.D. Stability prediction of gate roadways in longwall mining using artificial neural networks. Neural Comput. Appl. 2017, 28, 3537–3555. [Google Scholar] [CrossRef]
- Rahimdel, M.J.; Mirzaei, M.; Sattarvand, J.; Ghodrati, B.; Nasirabad, H.M. Artificial neural network to predict the health risk caused by whole body vibration of mining trucks. J. Theor. Appl. Vib. Acoust. 2017, 3, 1–14. [Google Scholar] [CrossRef]
- Baek, J.; Choi, Y. Deep Neural Network for Ore Production and Crusher Utilization Prediction of Truck Haulage System in Underground Mine. Appl. Sci. 2019, 9, 4180. [Google Scholar] [CrossRef]
- Glorot, X.; Bordes, A.; Bengio, Y. Deep Sparse Rectifier Neural Networks. In Proceedings of the 14th International Conference on Artificial Intelligence and Statistics, Ft. Lauderdale, FL, USA, 11–13 April 2011; Gordon, G., Dunson, D., Dudik, M., Eds.; JMLR W&CP: Brookline, MA, USA, 2011; pp. 315–323. [Google Scholar]
- Neural Networks and Deep Learning by Michael Nielsen. Available online: http://neuralnetworksanddeeplearning.com/ (accessed on 10 October 2019).
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning Representations by Back-Propagating Errors. In Cognitive Modeling; Polk, T.A., Seifert, C.M., Eds.; The MIT Press: Cambridge, MA, USA, 2002; pp. 213–220. ISBN 0-262-66116-0. [Google Scholar]
- Suboleski, S.C. Mine Systems Engineering Lecture Notes; The Pennsylvania State University: State College, PA, USA, 1975. [Google Scholar]
- Bouckaert, R.R.; Frank, E. Evaluating the Replicability of Significance Tests for Comparing Learning Algorithms. In Proceedings of the Advances in Knowledge Discovery and Data Mining: 8th Pacific-Asia Conference, Sydney, Australia, 26–28 May 2004; Dai, H., Srikant, R., Zhang, C., Eds.; Springer: Heidelberg, Germany, 2004; pp. 3–12. [Google Scholar]
- Hinton, G.E. Salakhutdinov, R.R. Reducing the dimensionality of data with neural networks. Science 2006, 313, 504–507. [Google Scholar] [CrossRef]
- Hinton, G.E.; Osindero, S.; Teh, Y.-W. A Fast Learning Algorithm for Deep Belief Nets. Neural Comput. 2006, 18, 1527–1554. [Google Scholar] [CrossRef]
- Salakhutdinov, R.R.; Hiton, G.E. Deep Boltzmann Machines. In Proceedings of the 12th International Conference on Artificial Intelligence and Statistics (AISTATS 2009), Clearwater Beach, FL, USA, 16–18 April 2009; JMLR Proceedings: Brookline, MA, USA, 2009; pp. 448–455. [Google Scholar]
- Liaw, A.; Wiener, M. Classification and Regression by randomForest. R News 2002, 2, 18–22. [Google Scholar]
- Drucker, H.; Burges, C.J.C.; Kaufman, L.; Smola, A.J.; Vapnik, V. Support vector regression machines. In Proceedings of the 9th International Conference on Neural Information Processing Systems, Denver, CO, USA, 3–5 December 1996; MIT Press: Cambridge, MA, USA, 1996; pp. 155–161. [Google Scholar]
- Li, C.; Wang, L.; Zhang, G.; Wang, H.; Shang, F. Functional-type Single-input-rule-modules Wind Speed Prediction. IEEE/CAA J. Autom. Sin. 2017, 4, 751–762. [Google Scholar] [CrossRef]
- Chen, C.L.P.; Liu, Z. Broad Learning System: An Effective and Efficient Incremental Learning System Without the Need for Deep Architecture. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 10–24. [Google Scholar] [CrossRef] [PubMed]
- Gao, S.; Member, S.; Zhou, M.; Wang, Y.; Cheng, J.; Yachi, H.; Wang, J. Dendritic Neuron Model With Effective Learning Algorithms for Classification, Approximation, and Prediction. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 601–614. [Google Scholar] [CrossRef] [PubMed]
- Principi, E.; Rossetti, D.; Squartini, S.; Member, S.; Piazza, F.; Member, S. Unsupervised Electric Motor Fault Detection by Using Deep Autoencoders. IEEE/CAA J. Autom. Sin. 2019, 6, 441–451. [Google Scholar] [CrossRef]
- Wang, G.; Qiao, J.; Bi, J.; Li, W.; Zhou, M. TL-GDBN: Growing Deep Belief Network With Transfer Learning. IEEE Trans. Autom. Sci. Eng. 2019, 16, 874–885. [Google Scholar] [CrossRef]
- Wang, G.; Jia, Q.; Qiao, J.; Bi, J.; Liu, C. A sparse deep belief network with efficient fuzzy learning framework. Neural Netw. 2020, 121, 430–440. [Google Scholar] [CrossRef]
- Vapnik, V. Principles of Risk Minimization for Learning Theory. In Proceedings of the Neural Information Processing Systems (NIPS), Denver, CO, USA, 2–5 December 1991; Morgan Kaufmann: Burlington, MA, USA, 1991; pp. 831–838. [Google Scholar]
- Haykin, S.S. Neural Networks: A Comprehensive Foundation, 2nd ed.; Pearson Prentice Hall: Patparganj, Delhi, India, 1999; pp. 1–842. ISBN 81-7808-300-0. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Type | Unit |
|---|---|---|
| 1 | Relative operation start time | Min |
| 2 | Relative operation end time | Min |
| 3 | Interval between operation times | Min |
| 4 | Number of dispatched 45 tons trucks | Number |
| 5 | Number of dispatched 60 tons trucks | Number |
| 6 | Number of dispatched 84 tons trucks | Number |
| 7 | Loading capacity of 45 tons trucks | Tons |
| 8 | Loading capacity of 60 tons trucks | Tons |
| 9 | Loading capacity of 84 tons trucks | Tons |
| 10 | Dumping zone A utilization of 45 tons trucks | Ratio |
| 11 | Dumping zone B utilization of 45 tons trucks | Ratio |
| 12 | Dumping zone A utilization of 60 tons trucks | Ratio |
| 13 | Dumping zone B utilization of 60 tons trucks | Ratio |
| 14 | Dumping zone A utilization of 84 tons trucks | Ratio |
| 15 | Dumping zone B utilization of 84 tons trucks | Ratio |
| 16 | Average stay time of trucks at dumping zone A | Min |
| 17 | Average stay time of trucks at dumping zone B | Min |
| 18 | Average travel time of trucks using dumping zone A | Min |
| 19 | Average travel time of trucks using dumping zone B | Min |
| Features | Ore Production (M 1) | Ore Production (A 2) | |||||
|---|---|---|---|---|---|---|---|
| Dump Truck Type | Dump Truck Type | ||||||
| 45 tons | 60 tons | 84 tons | 45 tons | 60 tons | 84 tons | ||
| Average number of dispatched trucks | 4 | 2 | 4 | 3 | 2 | 4 | |
| Average utilization ratio (DA 3:DB 4) | 0.51:0.49 | 0.34:0.66 | 0.27:0.73 | 0.45:0.55 | 0.30:0.70 | 0.21:0.79 | |
| Average stay time (min) | DA | 2.25 | 2.29 | ||||
| DB | 3.65 | 2.64 | |||||
| Average travel time (min) | DA | 11.08 | 11.51 | ||||
| DB | 10.39 | 10.47 | |||||
| Ore Production during Morning Operation Time | Ore Production during Afternoon Operation Time | ||
|---|---|---|---|
| Input Variables | PCC 1 | Input Variables | PCC 1 |
| Interval between operation times | 0.77 | Interval between operation times | 0.81 |
| Relative operation end time | 0.43 | Relative operation end time | 0.40 |
| Number of dispatched 60 tons trucks | 0.41 | Number of dispatched 60 tons trucks | 0.37 |
| Number of dispatched 84 tons trucks | 0.31 | Number of dispatched 84 tons trucks | 0.33 |
| Dumping zone A utilization of 60 tons trucks | 0.22 | Dumping zone B utilization of 84 tons trucks | 0.17 |
| Number of dispatched 45 tons trucks | 0.22 | Number of dispatched 45 tons trucks | 0.17 |
| Average staying time of trucks in dumping zone B | −0.19 | Dumping zone A utilization of 84 tons trucks | −0.10 |
| Relative operation start time | −0.33 | Relative operation start time | −0.40 |
| Hidden Layer Configuration | No. of Hidden Layer | No. of Hidden Layer Nodes | No. of Cases | ||||
| From | To | Interval | From | To | Interval | ||
| 3 | 5 | 1 | 30 | 50 | 10 | 9 | |
| Date | Morning Operation Time | |||||||||||||||||||
| Input Features | OP 1 | |||||||||||||||||||
| 2/9 | 0 | 210 | 210 | 4 | 2 | 4 | 45 | 60 | 84 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 2.83 | 0 | 10.6 | 6819 |
| 2/11 | 0 | 210 | 210 | 2 | 3 | 5 | 45 | 60 | 84 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 6.21 | 0 | 12.33 | 4791 |
| 2/12 | 0 | 210 | 210 | 3 | 3 | 5 | 45 | 60 | 84 | 0.09 | 0.91 | 0 | 1 | 0 | 1 | 8.95 | 3.04 | 13.2 | 12.08 | 7467 |
| 2/13 | 0 | 210 | 210 | 3 | 2 | 4 | 45 | 60 | 84 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 4.44 | 0 | 9.36 | 7686 |
| 2/14 | 0 | 210 | 210 | 5 | 3 | 4 | 45 | 60 | 84 | 0.57 | 0.43 | 0.44 | 0.56 | 0 | 1 | 3.23 | 1.81 | 15.08 | 9.87 | 9075 |
| Date | Afternoon Operation Time | |||||||||||||||||||
| Input Features | OP 1 | |||||||||||||||||||
| 2/9 | 0 | 210 | 210 | 3 | 2 | 4 | 45 | 60 | 84 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 4.35 | 0 | 11.27 | 6033 |
| 2/11 | 0 | 210 | 210 | 3 | 2 | 4 | 45 | 60 | 84 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 3.46 | 0 | 10.12 | 6501 |
| 2/12 | 0 | 210 | 210 | 4 | 3 | 5 | 45 | 60 | 84 | 0.1 | 0.9 | 0 | 1 | 0 | 1 | 13.88 | 4.4 | 7.4 | 10.69 | 6117 |
| 2/13 | 0 | 210 | 210 | 3 | 2 | 4 | 45 | 60 | 84 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 4.56 | 0 | 10.58 | 4872 |
| 2/14 | 0 | 210 | 210 | 4 | 3 | 4 | 45 | 60 | 84 | 0.72 | 0.28 | 0.74 | 0.26 | 0 | 1 | 4.09 | 1.5 | 10.41 | 11.91 | 8256 |
| No. of Hidden Layers | No. of Hidden Layer Nodes | Statistics of MAPE | Round of 5-Fold Cross Validation | Total Mean | ||||
|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||||
| 3 | 30 | Mean | 6.06 | 6.09 | 6.22 | 6.13 | 5.90 | 6.08 |
| STD | 0.26 | 0.47 | 0.43 | 0.17 | 0.19 | 0.30 | ||
| 40 | Mean | 5.54 | 5.43 | 5.77 | 5.37 | 5.66 | 5.55 | |
| STD | 0.24 | 0.21 | 0.38 | 0.38 | 0.10 | 0.26 | ||
| 50 | Mean | 4.97 | 5.14 | 5.30 | 5.04 | 5.12 | 5.11 | |
| STD | 0.13 | 0.36 | 0.58 | 0.32 | 0.21 | 0.32 | ||
| 4 | 30 | Mean | 5.66 | 5.87 | 5.81 | 5.66 | 6.02 | 5.81 |
| STD | 0.22 | 0.17 | 0.32 | 0.25 | 0.38 | 0.27 | ||
| 40 | Mean | 5.09 | 5.00 | 4.90 | 5.06 | 5.12 | 5.04 | |
| STD | 0.34 | 0.18 | 0.30 | 0.18 | 0.41 | 0.28 | ||
| 50 | Mean | 4.98 | 4.77 | 4.64 | 4.75 | 4.78 | 4.78 | |
| STD | 0.21 | 0.24 | 0.17 | 0.28 | 0.15 | 0.21 | ||
| 5 | 30 | Mean | 5.45 | 5.53 | 5.73 | 5.54 | 5.39 | 5.53 |
| STD | 0.43 | 0.36 | 0.26 | 0.39 | 0.30 | 0.35 | ||
| 40 | Mean | 5.36 | 5.14 | 4.87 | 4.77 | 5.22 | 5.07 | |
| STD | 0.09 | 0.39 | 0.29 | 0.20 | 0.54 | 0.30 | ||
| 50 | Mean | 4.75 | 5.02 | 4.95 | 4.87 | 4.74 | 4.87 | |
| STD | 0.14 | 0.18 | 0.25 | 0.49 | 0.20 | 0.25 | ||
| DNN Models (No. of Hidden Layers, No. of Hidden Layer Nodes) | (3, 30) | (3, 40) | (3, 50) | (4, 30) | (4, 40) | (4, 50) | (5, 30) | (5, 40) | (5, 50) |
|---|---|---|---|---|---|---|---|---|---|
| (3, 30) | |||||||||
| (3, 40) | p < 0.05 | ||||||||
| (3, 50) | p < 0.05 | NS | |||||||
| (4, 30) | NS 1 | NS | p < 0.05 | ||||||
| (4, 40) | p < 0.05 | NS | NS | p < 0.05 | |||||
| (4, 50) | p < 0.05 | p < 0.05 | NS | p < 0.05 | NS | ||||
| (5, 30) | p < 0.05 | NS | NS | NS | NS | p < 0.05 | |||
| (5, 40) | p < 0.05 | NS | NS | p < 0.05 | NS | NS | NS | ||
| (5, 50) | p < 0.05 | p < 0.05 | NS | p < 0.05 | NS | NS | p < 0.05 | NS |
| No. of Hidden Layers | No. of Hidden Layer Nodes | Statistics of MAPE | Round of 5-Fold Cross Validation | Total Mean | ||||
|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||||
| 3 | 30 | Mean | 6.63 | 7.23 | 6.90 | 7.10 | 7.13 | 7.00 |
| STD | 0.56 | 0.70 | 0.44 | 0.56 | 0.68 | 0.59 | ||
| 40 | Mean | 6.05 | 6.11 | 6.25 | 6.07 | 6.22 | 6.14 | |
| STD | 0.42 | 0.42 | 0.41 | 0.24 | 0.25 | 0.35 | ||
| 50 | Mean | 5.53 | 5.55 | 6.04 | 5.41 | 5.74 | 5.65 | |
| STD | 0.39 | 0.23 | 0.82 | 0.29 | 0.19 | 0.38 | ||
| 4 | 30 | Mean | 6.53 | 6.32 | 6.61 | 6.50 | 6.29 | 6.45 |
| STD | 0.48 | 0.41 | 0.42 | 0.17 | 0.12 | 0.32 | ||
| 40 | Mean | 5.76 | 5.80 | 5.66 | 5.55 | 5.86 | 5.73 | |
| STD | 0.31 | 0.16 | 0.24 | 0.31 | 0.21 | 0.25 | ||
| 50 | Mean | 5.18 | 5.42 | 5.28 | 5.15 | 5.25 | 5.26 | |
| STD | 0.26 | 0.30 | 0.26 | 0.25 | 0.15 | 0.24 | ||
| 5 | 30 | Mean | 6.13 | 6.32 | 6.63 | 6.38 | 6.50 | 6.39 |
| STD | 0.13 | 0.60 | 0.53 | 0.47 | 0.58 | 0.46 | ||
| 40 | Mean | 5.60 | 5.60 | 5.43 | 5.66 | 5.92 | 5.64 | |
| STD | 0.42 | 0.40 | 0.28 | 0.66 | 0.39 | 0.43 | ||
| 50 | Mean | 5.31 | 5.25 | 5.34 | 5.07 | 5.10 | 5.22 | |
| STD | 0.36 | 0.44 | 0.41 | 0.30 | 0.27 | 0.36 | ||
| DNN models (No. of Hidden Layers, No. of Hidden Layer Nodes) | (3, 30) | (3, 40) | (3, 50) | (4, 30) | (4, 40) | (4, 50) | (5, 30) | (5, 40) | (5, 50) |
|---|---|---|---|---|---|---|---|---|---|
| (3, 30) | |||||||||
| (3, 40) | p < 0.05 | ||||||||
| (3, 50) | p < 0.05 | NS | |||||||
| (4, 30) | NS 1 | NS | p < 0.05 | ||||||
| (4, 40) | p < 0.05 | NS | NS | p < 0.05 | |||||
| (4, 50) | p < 0.05 | p < 0.05 | NS | p < 0.05 | p < 0.05 | ||||
| (5, 30) | NS | NS | p < 0.05 | NS | NS | p < 0.05 | |||
| (5, 40) | p < 0.05 | NS | NS | p < 0.05 | NS | NS | p < 0.05 | ||
| (5, 50) | p < 0.05 | p < 0.05 | NS | p < 0.05 | p < 0.05 | NS | p < 0.05 | NS |
| Date | Percentage Error (%) for Ore Production | ||
|---|---|---|---|
| Morning Operation Time (8:30 a.m.–12:00 p.m.) | Afternoon Operation Time (1:00 p.m.–4:30 p.m.) | All day (8:30 a.m.–4:30 p.m.) | |
| 2019-02-09 | 14.96 | −22.92 | −2.82 |
| 2019-02-11 | 9.11 | −4.41 | 1.33 |
| 2019-02-12 | 7.41 | −12.23 | −1.43 |
| 2019-02-13 | −21.42 | −2.68 | −14.15 |
| 2019-02-14 | 4.10 | −2.12 | 1.13 |
| MAPE | 11.40 | 8.87 | 4.17 |
| Degree of Multiple Regression Equation | Statistics | Round of 5-Fold Cross Validation | Total Mean | |||||
|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||||
| 2 | R2 | Mean | 0.90 | 0.90 | 0.90 | 0.91 | 0.92 | 0.91 |
| STD | 0.13 | 0.13 | 0.14 | 0.12 | 0.10 | 0.13 | ||
| MAPE | Mean | 23.71 | 23.47 | 23.87 | 23.37 | 23.26 | 23.54 | |
| STD | 8.37 | 8.52 | 9.37 | 8.34 | 7.82 | 8.48 | ||
| Date | MAPE | |||||
|---|---|---|---|---|---|---|
| 2019-02-09 | 2019-02-11 | 2019-02-12 | 2019-02-13 | 2019-02-14 | ||
| Percentage Error (%) | 13.00 | 48.68 | 8.10 | −11.78 | 0.28 | 16.37 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Baek, J.; Choi, Y. Deep Neural Network for Predicting Ore Production by Truck-Haulage Systems in Open-Pit Mines. Appl. Sci. 2020, 10, 1657. https://doi.org/10.3390/app10051657
Baek J, Choi Y. Deep Neural Network for Predicting Ore Production by Truck-Haulage Systems in Open-Pit Mines. Applied Sciences. 2020; 10(5):1657. https://doi.org/10.3390/app10051657
Chicago/Turabian StyleBaek, Jieun, and Yosoon Choi. 2020. "Deep Neural Network for Predicting Ore Production by Truck-Haulage Systems in Open-Pit Mines" Applied Sciences 10, no. 5: 1657. https://doi.org/10.3390/app10051657
APA StyleBaek, J., & Choi, Y. (2020). Deep Neural Network for Predicting Ore Production by Truck-Haulage Systems in Open-Pit Mines. Applied Sciences, 10(5), 1657. https://doi.org/10.3390/app10051657