Dynamic Analysis of Spatial Truss Structures Including Sliding Joint Based on the Geometrically Exact Beam Theory and Isogeometric Analysis

 , and
, and
Abstract
1. Introduction
2. The Geometrically Exact Beam Model
2.1. Beam Kinematics
2.2. Beam Statics and Its Linearization
2.3. Beam Dynamics and Its Linearization
3. Finite Element Formulation
3.1. Spatial Discretization: NURBS Basis Functions
3.2. Discretization of the Linearized Equations
3.3. Time Discretization: Lie Group Generalized-α Method
4. Sliding Joint
5. Numerical Examples
5.1. High-Speed Flexible Slider-Crank
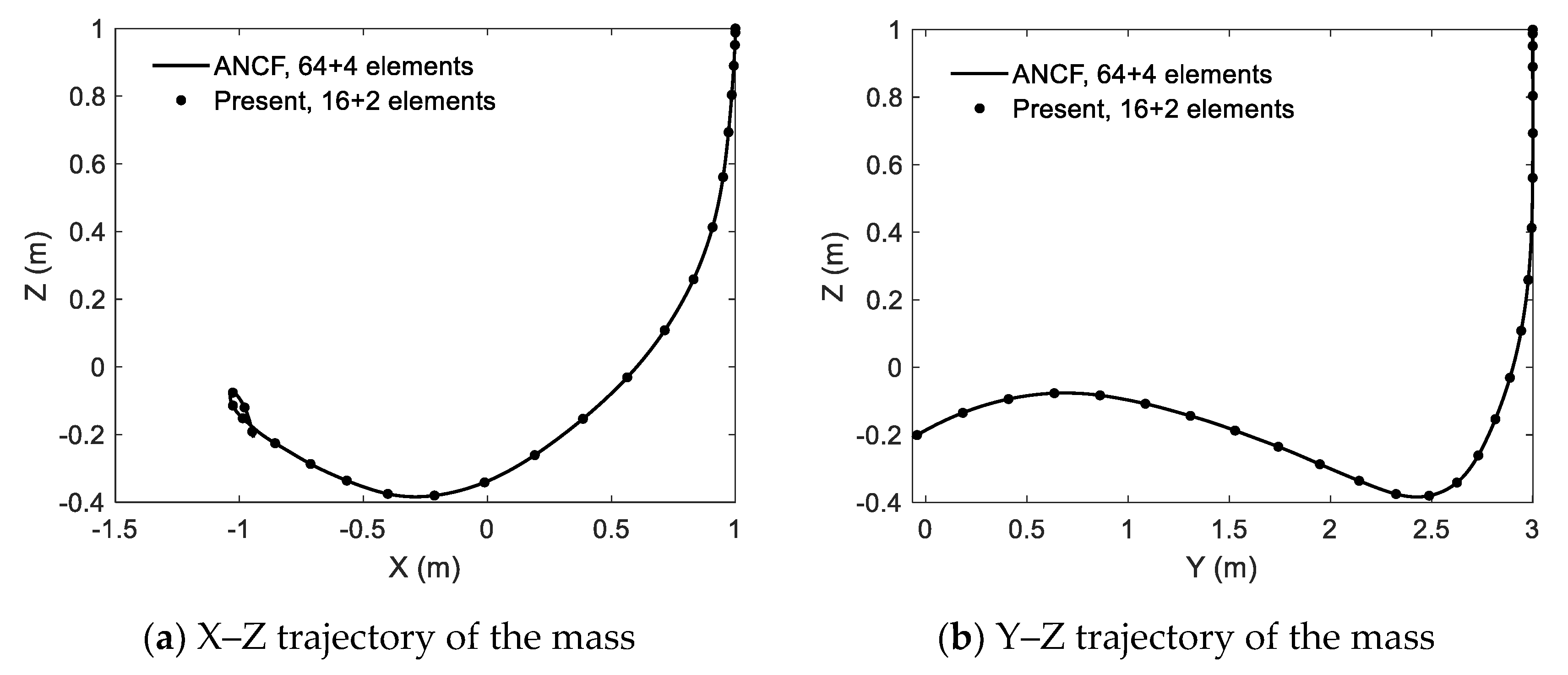
5.2. Sliding Three-Dimensional Beam with Eccentricity
5.3. Deployable Spatial Truss Structure Unit
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Shabana, A.A. Definition of the slopes and the finite element absolute nodal coordinate formulation. Multibody Sys. Dyn. 1997, 1, 339–348. [Google Scholar] [CrossRef]
- Shabana, A.A.; Yakoub, R.Y. Three dimensional absolute nodal coordinate formulation for beam elements: Theory. J. Mech. Des. 2001, 123, 606–613. [Google Scholar] [CrossRef]
- Romero, I. A comparison of finite elements for nonlinear beams: The absolute nodal coordinate and geometrically exact formulations. Multibody Sys. Dyn. 2008, 20, 51–68. [Google Scholar] [CrossRef]
- Bauchau, O.A.; Han, S.; Mikkola, A.; Matikainen, M.K. Comparison of the absolute nodal coordinate and geometrically exact formulations for beams. Multibody Sys. Dyn. 2013, 32, 67–85. [Google Scholar] [CrossRef]
- Reissner, E. On one-Dimensional finite-Strain beam theory: The plane problem. Appl. Math. Phys. 1972. [Google Scholar] [CrossRef]
- Reissner, E. On one-Dimensional large displacement finite strain beam theory. Stud. Appl. Math. 1973. [Google Scholar] [CrossRef]
- Simo, J.C. A finite strain beam formulation. The three-dimensional dynamic problem. Part I. Comput. Methods Appl. Mech. Engrg. 1985, 49, 55–70. [Google Scholar] [CrossRef]
- Simo, J.C.; Vu-Quoc, L. A three-Dimensional finite-Strain rod model. Part ii: Computational aspects. Comput. Methods Appl. Mech. Engrg. 1986, 58, 79–116. [Google Scholar] [CrossRef]
- Simo, J.C.; Vu-Quoc, L. On the dynamics in space of rods undergoing large motions—A geometrically exact approach. Comput. Methods Appl. Mech. Engrg. 1988, 66, 125–161. [Google Scholar] [CrossRef]
- Cardona, A.; Géradin, M. A beam finite element non-linear theory with finite rotations. Int. J. Numer. Methods Eng. 1988, 26, 2403–2438. [Google Scholar] [CrossRef]
- Ibrahimbegović, A.; Frey, F.; Kozar, I. Computational aspects of vector-Like parametrization of 3-dimensional finite rotations. Int. J. Numer. Methods Eng. 1995, 38, 3653–3673. [Google Scholar] [CrossRef]
- Crisfield, M.A.; Jelenić, G. Objectivity of strain measures in the geometrically exact three-Dimensional beam theory and its finite-Element implementation. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1999, 455, 1125–1147. [Google Scholar] [CrossRef]
- Jelenić, G.; Crisfield, M.A. Geometrically exact 3d beam theory: Implementation of a strain-Invariant finite element for statics and dynamics. Comput. Methods Appl. Mech. Engrg. 1999, 171, 141–171. [Google Scholar] [CrossRef]
- Romano, G.; Barretta, R.; Diaco, M. Geometric continuum mechanics. Meccanica 2014, 49, 111–133. [Google Scholar] [CrossRef]
- Romano, G.; Barretta, R.; Diaco, M. The geometry of nonlinear elasticity. Acta Mech. 2014, 225, 3199–3235. [Google Scholar] [CrossRef]
- Shigley, J.E.; Uicker, J.J. Theory of Machines and Mechanisms; McGrawHill: New York, NY, USA, 1980. [Google Scholar] [CrossRef]
- Bauchau, O.A. On the modeling of prismatic joints in flexible multi-Body systems. Comput. Methods Appl. Mech. Engrg. 2000, 181, 87–105. [Google Scholar] [CrossRef]
- Bauchau, O.A.; Bottasso, C.L. Contact conditions for cylindrical, prismatic, and screw joints in flexible multibody systems. Multibody Syst. Dyn. 2001, 5, 251–278. [Google Scholar] [CrossRef]
- Sugiyama, H.; Escalona, J.L.; Shabana, A.A. Formulation of three-Dimensional joint constraints using the absolute nodal coordinates. Nonlinear Dyn. 2003, 31, 167–195. [Google Scholar] [CrossRef]
- Gerstmayr, J.; Shabana, A.A. Analysis of thin beams and cables using the absolute nodal co-Ordinate formulation. Nonlinear Dyn. 2006, 45, 109–130. [Google Scholar] [CrossRef]
- García de Jalón, J.; Bayo, E. Inematic and Dynamic Simulation of Multibody Systems––The Real-Time Challenge; Springer: New York, NY, USA, 1994. [Google Scholar] [CrossRef]
- Géradin, M.; Cardona, A. A finite element approach. In Flexible Multibody Dynamics; John Wiley & Sons: Hoboken, NJ, USA, 2001. [Google Scholar]
- Munoz, J.J.; Jelenić, G. Sliding contact conditions using the master-Slave approach with application on geometrically non-Linear beams. Int. J. Solids Struct. 2004, 41, 6963–6992. [Google Scholar] [CrossRef]
- Hughes, T.J.R.; Cottrell, J.A.; Bazilevs, Y. Isogeometric analysis: Cad, finite elements, NURBS, exact geometry and mesh refinement. Comput. Methods Appl. Mech. Engrg. 2005, 194, 4135–4195. [Google Scholar] [CrossRef]
- De Lorenzis, L.; Wriggers, P.; Hughes, T.J.R. Isogeometric contact: A review. GAMM-Mitt. 2014, 37, 85–123. [Google Scholar] [CrossRef]
- Bauer, A.M.; Breitenberger, M.; Philipp, B.; Wüchner, R.; Bletzinger, K.U. Nonlinear isogeometric spatial bernoulli beam. Comput. Methods Appl. Mech. Engrg. 2016, 303, 101–127. [Google Scholar] [CrossRef]
- Greco, L.; Cuomo, M. An isogeometric implicit g (1) mixed finite element for kirchhoff space rods. Comput. Methods Appl. Mech. Engrg. 2016, 298, 325–349. [Google Scholar] [CrossRef]
- Choi, M.-J.; Yoon, M.; Cho, S. Isogeometric configuration design sensitivity analysis of finite deformation curved beam structures using jaumann strain formulation. Comput. Methods Appl. Mech. Engrg. 2016, 309, 41–73. [Google Scholar] [CrossRef]
- Choi, M.-J.; Cho, S. Isogeometric configuration design sensitivity analysis of geometrically exact shear-Deformable beam structures. Comput. Methods Appl. Mech. Engrg. 2019, 351, 153–183. [Google Scholar] [CrossRef]
- Arnold, M.; Bruls, O. Convergence of the generalized-alpha scheme for constrained mechanical systems. Multibody Sys. Dyn. 2007, 18, 185–202. [Google Scholar] [CrossRef]
- Brüls, O.; Cardona, A.; Arnold, M. Lie group generalized-α time integration of constrained flexible multibody systems. Mech. Mach. Theory 2012, 48, 121–137. [Google Scholar] [CrossRef]
- Argyris, J. An excursion into large rotations. Comput. Methods Appl. Mech. Engrg. 1982, 32, 85–155. [Google Scholar] [CrossRef]
- Bauchau, O.A. Flexible Multibody Dynamics; Springer: Dordrecht, The Netherlands, 2011. [Google Scholar] [CrossRef]
- Li, W.; Cheng, D.; Liu, X.; Wang, Y.; Shi, W.; Tang, Z.; Gao, F.; Zeng, F.; Chai, H.; Luo, W.; et al. On-Orbit service (OOS) of spacecraft: A review of engineering developments. Prog. Aerosp. Sci. 2019, 108, 32–120. [Google Scholar] [CrossRef]
- Zhang, J.; Zhong, J.; He, L.; Gao, R. Modal analysis of the cable-Stayed space truss combining ansys and msc.adams. Adv. Mater. Res. 2010, 121–122, 832–837. [Google Scholar] [CrossRef]
- Luo, H.; Chen, Z.; Leng, Y.; Wang, H. Rigid-Flexible coupling dynamics simulation of 3-rps parallel robot based on adams and ansys. Appl. Mech. Mater. 2013, 290, 91–96. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | First Case |
|---|---|
| Length of Rod I | 0.3 m |
| Length of Rod II | 0.6 m |
| Cross-section | (0.03 × 0.03) m2 |
| Young’s modulus | 2.1e11 N/m2 |
| Poisson coefficient | 0.3 |
| Mass density | 7850 kg/m3 |
| Mass of slider | 0.1 kg |
| Gravity | 9.81 m/s2 |
| Update | Frozen | ||
|---|---|---|---|
| h = 0.0005 s | Update times | 1434 | 0 |
| Total iterations | 1435 | 1473 | |
| h = 0.0001 s | Update times | 5714 | 0 |
| Total iterations | 5715 | 5715 |
| Parameters | Value |
|---|---|
| Position of A | [0,3,1] |
| Position of B | [0,0,0] |
| Position of M | [1,3,1] |
| Cross-section | (0.01 × 0.01) m2 |
| Young’s modulus | 2e8 N/m2 |
| Poisson coefficient | 0.3 |
| Mass density | 800 kg/m3 |
| Tip mass | 1 kg |
| Gravity | 9.81 m/s2 |
| Parameters | Value |
|---|---|
| Side length of square frame | 2 m |
| Length of cross-bar | 4 m |
| Length of diagonal rod | m |
| Inside diameter of all rods | 0.055 m |
| Outside diameter of all rods | 0.060 m |
| Young’s modulus | 2.1e11 N/m2 |
| Poisson coefficient | 0.3 |
| Mass density | 7850 kg/m3 |
| Gravity | 9.81 m/s2 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Z.; Rong, J.; Liu, C.; Liu, Z.; Shi, W.; Xin, P.; Li, W. Dynamic Analysis of Spatial Truss Structures Including Sliding Joint Based on the Geometrically Exact Beam Theory and Isogeometric Analysis. Appl. Sci. 2020, 10, 1231. https://doi.org/10.3390/app10041231
Wu Z, Rong J, Liu C, Liu Z, Shi W, Xin P, Li W. Dynamic Analysis of Spatial Truss Structures Including Sliding Joint Based on the Geometrically Exact Beam Theory and Isogeometric Analysis. Applied Sciences. 2020; 10(4):1231. https://doi.org/10.3390/app10041231
Chicago/Turabian StyleWu, Zhipei, Jili Rong, Cheng Liu, Zhichao Liu, Wenjing Shi, Pengfei Xin, and Weijie Li. 2020. "Dynamic Analysis of Spatial Truss Structures Including Sliding Joint Based on the Geometrically Exact Beam Theory and Isogeometric Analysis" Applied Sciences 10, no. 4: 1231. https://doi.org/10.3390/app10041231
APA StyleWu, Z., Rong, J., Liu, C., Liu, Z., Shi, W., Xin, P., & Li, W. (2020). Dynamic Analysis of Spatial Truss Structures Including Sliding Joint Based on the Geometrically Exact Beam Theory and Isogeometric Analysis. Applied Sciences, 10(4), 1231. https://doi.org/10.3390/app10041231