Assessment of Wide-Sense Stationarity of an Underwater Acoustic Channel Based on a Pseudo-Random Binary Sequence Probe Signal


Abstract
Featured Application
Abstract
1. Introduction
2. UAC Impulse Response Measurement
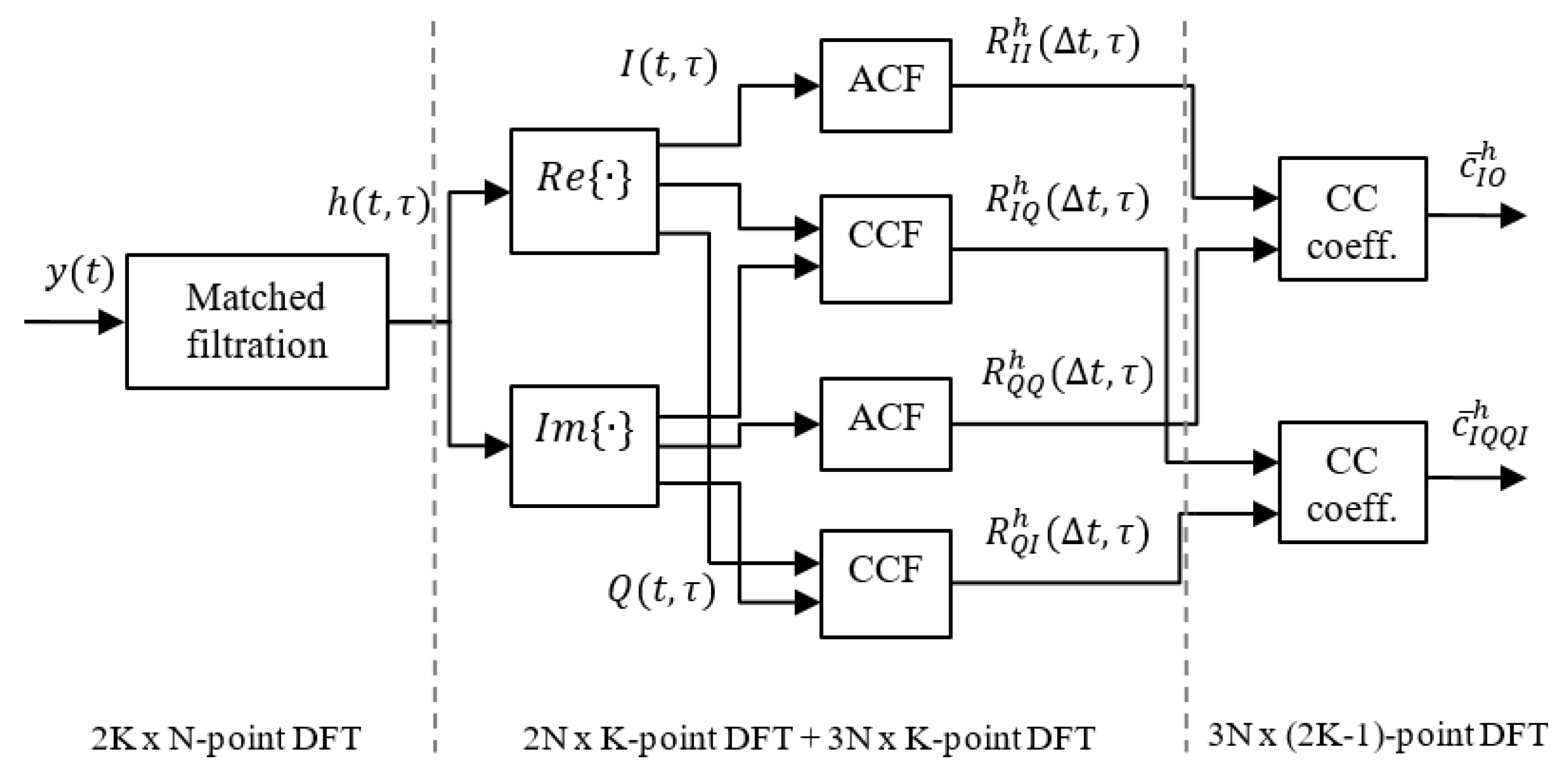
3. Testing Wide-Sense Stationary Assumption Fulfilment
4. Results
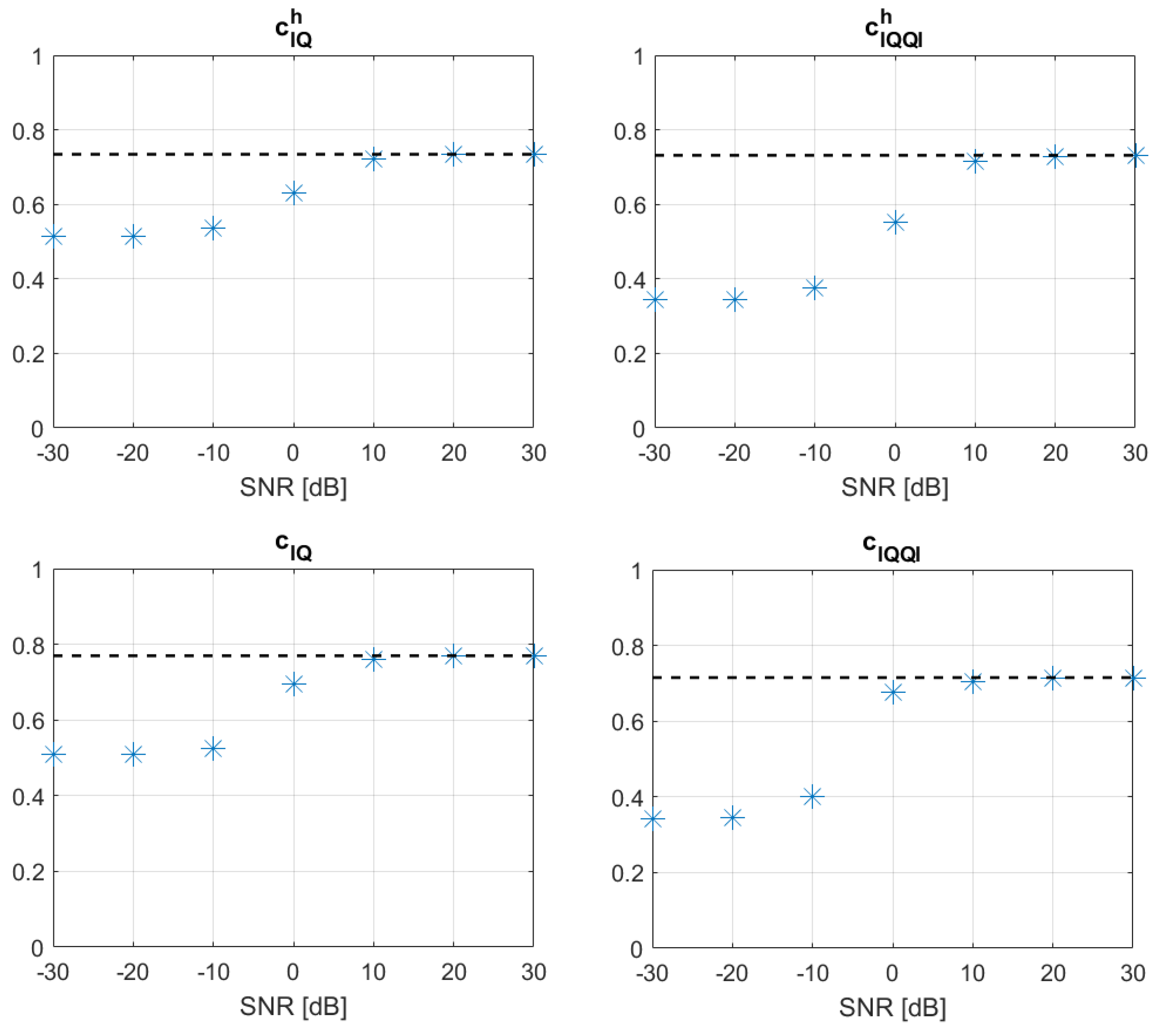
4.1. Simulation Tests
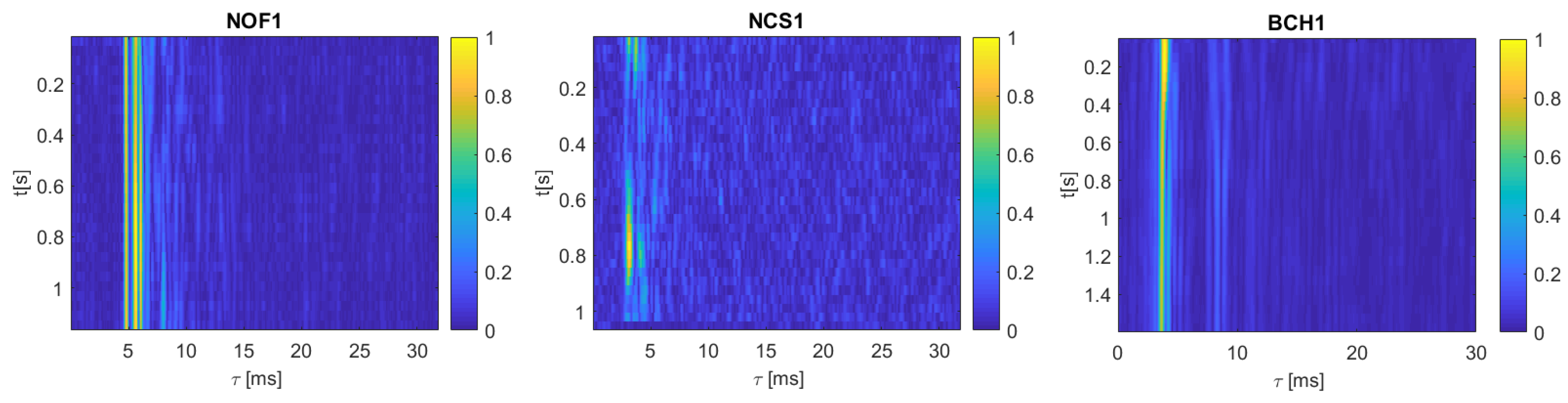
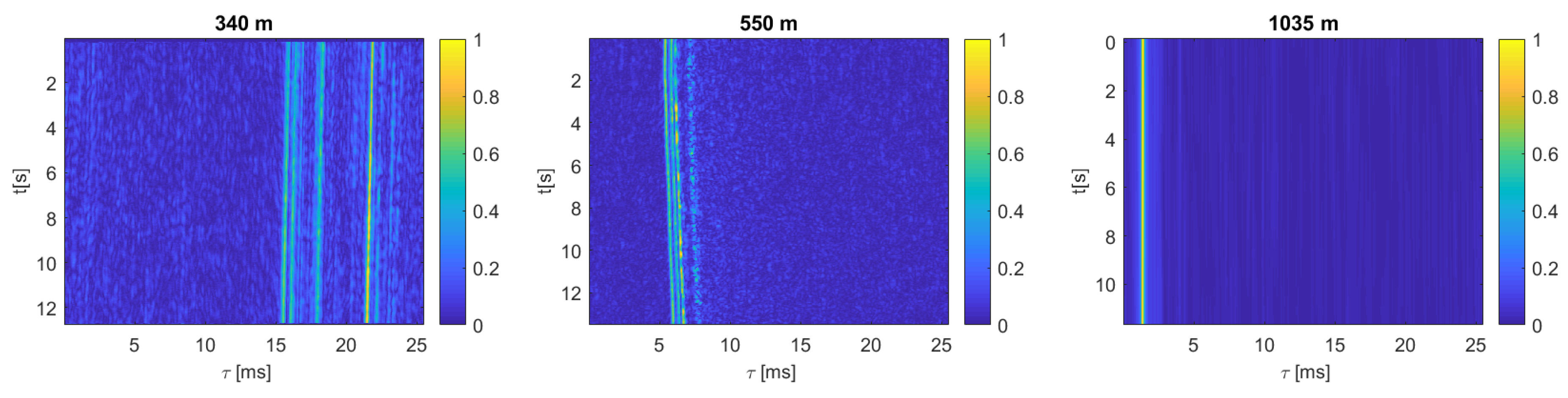
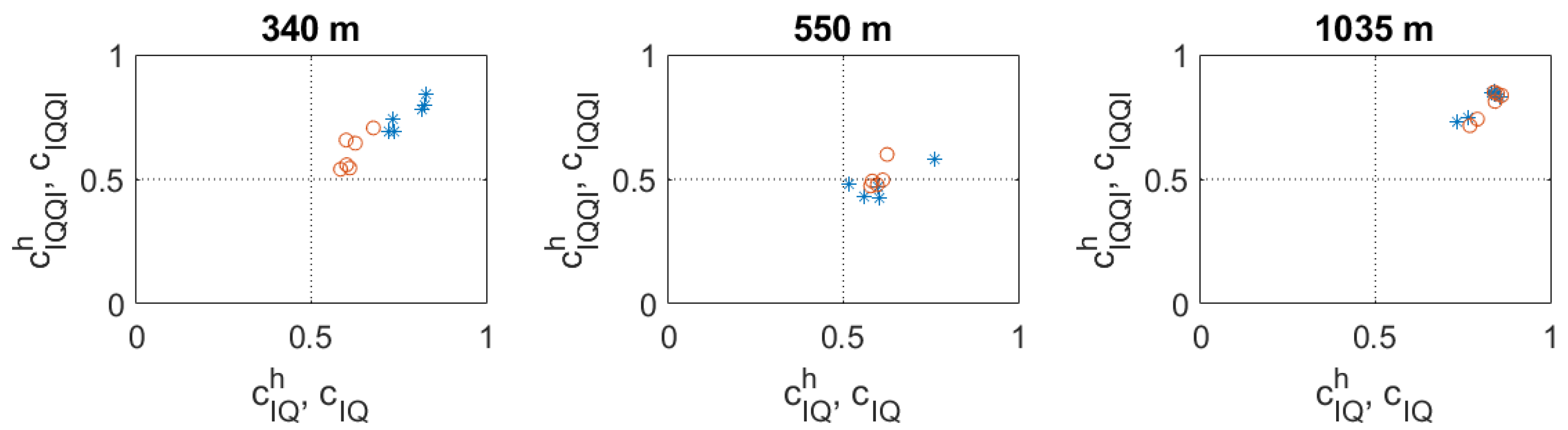
4.2. Underwater Experiment
5. Discussion
6. Conclusions
Conflicts of Interest
Abbreviations
| ACF | Autocorrelation Function |
| CCF | Cross-Correlation Function |
| DFT | Discrete Fourier Transform |
| FHSS | Frequency Hopping Spread Spectrum |
| OFDM | Orthogonal Frequency-Division Multiplexing |
| PRBS | Pseudo-Random Binary Sequence |
| PSD | Power Spectral Density |
| TVIR | Time-Varying Impulse Response |
| UAC | Underwater Acoustic Communication |
| WSS | Wide-Sense Stationary |
| WSSUS | Wide-Sense Stationary Uncorrelated Scattering |
References
- Grelowska, G.; Kozaczka, E.; Witos-Okrasińska, D. Vertical Temperature Stratification of the Gulf of Gdansk Water. In Proceedings of the 2018 Joint Conference—Acoustics, Ustka, Poland, 11–14 September 2018; pp. 80–85. [Google Scholar] [CrossRef]
- Grelowska, G. Study of Seasonal Acoustic Properties of Sea Water in Selected Waters of the Southern Baltic. Pol. Marit. Res. 2016, 23, 25–30. [Google Scholar] [CrossRef]
- van Walree, P. Channel Sounding for Acoustic Communications: Techniques and Shallow-Water Examples; FFI-Rapport 2011/00007; Forsvarets forskningsinstitutt: Kjeller, Norway, 2011. [Google Scholar]
- Kochanska, I.; Schmidt, J.; Rudnicki, M. Underwater Acoustic Communications in Time-Varying Dispersive Channels. In Proceedings of the 2016 Federated Conference on Computer Science and Information Systems (FedCSIS), Gdańsk, Poland, 11–14 September 2016; pp. 467–474. [Google Scholar]
- Nissen, I.; Kochanska, I. Stationary underwater channel experiment: Acoustic measurements and characteristics in the Bornholm area for model validations. Hydroacoustics 2016, 19, 285–296. [Google Scholar]
- Kochanska, I. Testing the wide-sense stationarity of bandpass signals for underwater acoustic communications. In Proceedings of the 2017 IEEE International Conference on INnovations in Intelligent SysTems and Applications (INISTA 2017), Gdynia, Poland, 3–5 July 2017; pp. 484–489. [Google Scholar] [CrossRef]
- Schmidt, J.H. Using Fast Frequency Hopping Technique to Improve Reliability of Underwater Communication System. Appl. Sci. 2020, 10, 1172. [Google Scholar] [CrossRef]
- Basu, P.; Rudoy, D.; Wolfe, P. A nonparametric test for stationarity based on local Fourier analysis. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Taipei, Taiwan, 19–24 April 2009; pp. 3005–3009. [Google Scholar] [CrossRef]
- Priestley, M.; Rao, T. A test for non-stationarity of time-series. J. R. Stat. Soc. Ser. B (Methodol.) 1969, 31, 140–149. [Google Scholar] [CrossRef]
- Iqbal, N.; Luo, J.; Schneider, C.; Dupleich, D.A.; Müller, R. Investigating Validity of Wide-Sense Stationary Assumption in Millimeter Wave Radio Channels. IEEE Access 2019, 180073–180082. [Google Scholar] [CrossRef]
- Tomasi, B.; Preisig, J.; Deane, G.B.; Zorzi, M. A study on the wide-sense stationarity of the underwater acoustic channel for non-coherent communication systems. In Proceedings of the 11th European Wireless Conference 2011—Sustainable Wireless Technologies (European Wireless), Vienna, Austria, 27–29 April 2011. [Google Scholar]
- Socheleau, F.; Laot, C.; Passerieux, J. Stochastic replay of non-wssus underwater acoustic communication channels recorded at sea. IEEE Trans. Signal Process. 2011, 59, 4838–4849. [Google Scholar] [CrossRef]
- Isukapalli, Y.; Song, H.; Hodgkiss, W. Stochastic channel simulator based on local scattering functions. JASA Express Lett. 2011, 130, EL200–EL205. [Google Scholar] [CrossRef] [PubMed]
- Kochanska, I.; Nissen, I.; Marszal, J. A method for testing the wide-sense stationary uncorrelated scattering assumption fulfillment for an underwater acoustic channel. J. Acoust. Soc. Am. 2018, 143, EL116–EL120. [Google Scholar] [CrossRef] [PubMed]
- Studanski, R.; Zak, A. Measurement of Hydroacoustic Channel Impulse Response. Appl. Mech. Mater. 2016, 817, 317–324. [Google Scholar] [CrossRef]
- Bracewell, R. The Fourier Transform and Its Applications, 3rd ed.; McGraw-Hill Series in Electrical and Computer Engineering, Circuits and Systems; McGraw-Hill College: New York, NY, USA, 2002; pp. 32–58. [Google Scholar]
- Franks, L. Carrier and bit synchronization in data communiaction—A tutorial review. IEEE Trans. Commun. 1980, 28, 1107–1121. [Google Scholar] [CrossRef]
- van Walree, P.; Socheleau, F.X.; Otnes, R.; Jenserud, T. The Watermark Benchmark for Underwater Acoustic Modulation Schemes. IEEE J. Ocean. Eng. 2017, 42, 1007–1018. [Google Scholar] [CrossRef]
- Sklar, B. Rayleigh fading channels in mobile digital communication systems. I. Characterization. IEEE Commun. Mag. 1997, 35, 90–100. [Google Scholar] [CrossRef]
- Schmidt, J.H. The Development of an Underwater Telephone for Digital Communication Purposes. Hydroacoustics 2016, 19, 341–352. [Google Scholar]
- Schmidt, J.H.; Kochańska, I.; Schmidt, A.M. Measurement of Impulse Response of Shallow Water Communication Channel by Correlation Method. Hydroacoustics 2017, 20, 149–158. [Google Scholar]
- McKeown, M. FFT Implementation on the TMS320VC5505, TMS320C5505, and TMS320C5515 DSPs; Application Report; Texas Instruments: Dallas, TX, USA, 2010. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Channel | m-Sequence Order | Bandwidth | Probe Sequence Duration | d | ||||
|---|---|---|---|---|---|---|---|---|
| NOF1 | 8 | 8 kHz | 32 ms | 0.7469 | 0.6590 | 0.6790 | 0.7126 | 0.0941 |
| NOF1 | 10 | 8 kHz | 128 ms | 0.7414 | 0.6374 | 0.6936 | 0.6748 | 0.1057 |
| NCS1 | 8 | 8 kHz | 32 ms | 0.6349 | 0.6114 | 0.6248 | 0.6374 | 0.0267 |
| NCS1 | 10 | 8 kHz | 128 ms | 0.5617 | 0.5302 | 0.5842 | 0.5385 | 0.0555 |
| BCH1 | 8 | 5 kHz | 51 ms | 0.9165 | 0.7868 | 0.8611 | 0.7988 | 0.1439 |
| BCH1 | 10 | 5 kHz | 205 ms | 0.8747 | 0.6916 | 0.8307 | 0.7099 | 0.2194 |
| Distance [m] | m-Seq. Order | B [kHz] | Probe Seq. Duration [ms] | d | ||||
|---|---|---|---|---|---|---|---|---|
| 340 | 8 | 5 | 51.2 | 0.825 (0.812) | 0.678 | 0.798 (0.798) | 0.706 | 0.173 (0.163) |
| 340 | 8 | 8 | 32.0 | 0.829 (0.815) | 0.626 | 0.842 (0.837) | 0.645 | 0.283 (0.270) |
| 340 | 8 | 10 | 25.6 | 0.816 (0.812) | 0.600 | 0.780 (0.787) | 0.657 | 0.249 (0.249) |
| 340 | 10 | 5 | 204.8 | 0.737 (0.720) | 0.601 | 0.691 (0.674) | 0.558 | 0.190 (0.166) |
| 340 | 10 | 8 | 128.0 | 0.734 (0.723) | 0.610 | 0.739 (0.733) | 0.545 | 0.231 (0.219) |
| 340 | 10 | 10 | 102.4 | 0.722 (0.720) | 0.584 | 0.691 (0.693) | 0.540 | 0.204 (0.203) |
| 550 | 8 | 5 | 51.2 | 0.762 (0.740) | 0.625 | 0.583 (0.548) | 0.599 | 0.138 (0.127) |
| 550 | 8 | 8 | 32.0 | 0.602 (0.593) | 0.597 | 0.426 (0.413) | 0.478 | 0.052 (0.065) |
| 550 | 8 | 10 | 25.6 | 0.559 (0.544) | 0.613 | 0.429 (0.405) | 0.497 | 0.087 (0.115) |
| 550 | 10 | 5 | 204.8 | 0.516 (0.536) | 0.583 | 0.482 (0.428) | 0.493 | 0.067 (0.080) |
| 550 | 10 | 8 | 128.0 | 0.600 (0.560) | 0.578 | 0.470 (0.425) | 0.473 | 0.022 (0.051) |
| 1035 | 8 | 5 | 51.2 | 0.830 | 0.860 | 0.847 | 0.837 | 0.032 |
| 1035 | 8 | 8 | 32.0 | 0.840 | 0.848 | 0.852 | 0.842 | 0.012 |
| 1035 | 8 | 10 | 25.6 | 0.840 | 0.839 | 0.840 | 0.850 | 0.009 |
| 1035 | 10 | 5 | 204.8 | 0.856 | 0.842 | 0.830 | 0.812 | 0.023 |
| 1035 | 10 | 8 | 128.0 | 0.765 | 0.791 | 0.749 | 0.741 | 0.028 |
| 1035 | 10 | 10 | 102.4 | 0.735 | 0.770 | 0.732 | 0.715 | 0.039 |
| m-Seq. Order | Bandwidth [kHz] | K | N | Complex FFT Size | FFT Calc. Time [ms] | TVIR Est. Time [s] | Energy/FFT [μJ] | Energy/TVIR [mJ] |
|---|---|---|---|---|---|---|---|---|
| 8 | 5 | 196 | 10,200 | 16,384 | 4.43 | 1.74 | 177.57 | 69.61 |
| 8 | 8 | 360 | 6375 | 8192 | 2.22 | 1.60 | 88.78 | 63.92 |
| 8 | 10 | 450 | 5100 | 8192 | 2.22 | 2.00 | 88.78 | 79.90 |
| 10 | 5 | 56 | 40,920 | 65,536 | 17.74 | 1.99 | 710.27 | 79.55 |
| 10 | 8 | 89 | 25,575 | 32,768 | 8.87 | 1.58 | 355.13 | 63.21 |
| 10 | 10 | 117 | 20,460 | 32,768 | 8.87 | 2.08 | 355.13 | 83.10 |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kochanska, I. Assessment of Wide-Sense Stationarity of an Underwater Acoustic Channel Based on a Pseudo-Random Binary Sequence Probe Signal. Appl. Sci. 2020, 10, 1221. https://doi.org/10.3390/app10041221
Kochanska I. Assessment of Wide-Sense Stationarity of an Underwater Acoustic Channel Based on a Pseudo-Random Binary Sequence Probe Signal. Applied Sciences. 2020; 10(4):1221. https://doi.org/10.3390/app10041221
Chicago/Turabian StyleKochanska, Iwona. 2020. "Assessment of Wide-Sense Stationarity of an Underwater Acoustic Channel Based on a Pseudo-Random Binary Sequence Probe Signal" Applied Sciences 10, no. 4: 1221. https://doi.org/10.3390/app10041221
APA StyleKochanska, I. (2020). Assessment of Wide-Sense Stationarity of an Underwater Acoustic Channel Based on a Pseudo-Random Binary Sequence Probe Signal. Applied Sciences, 10(4), 1221. https://doi.org/10.3390/app10041221