A Holistic Approach to Guarantee the Reliability of Positioning Based on Carrier Phase for Indoor Pseudolite

 , , ,
, , , 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
Featured Application
Abstract
1. Introduction
2. Algorithm
2.1. Double Differenced Positioning Algorithm in Pseudolite System
2.1.1. Observation Model in Pseudolite System
2.1.2. Parameter Estimation
2.2. The Procedure of PLRAIM
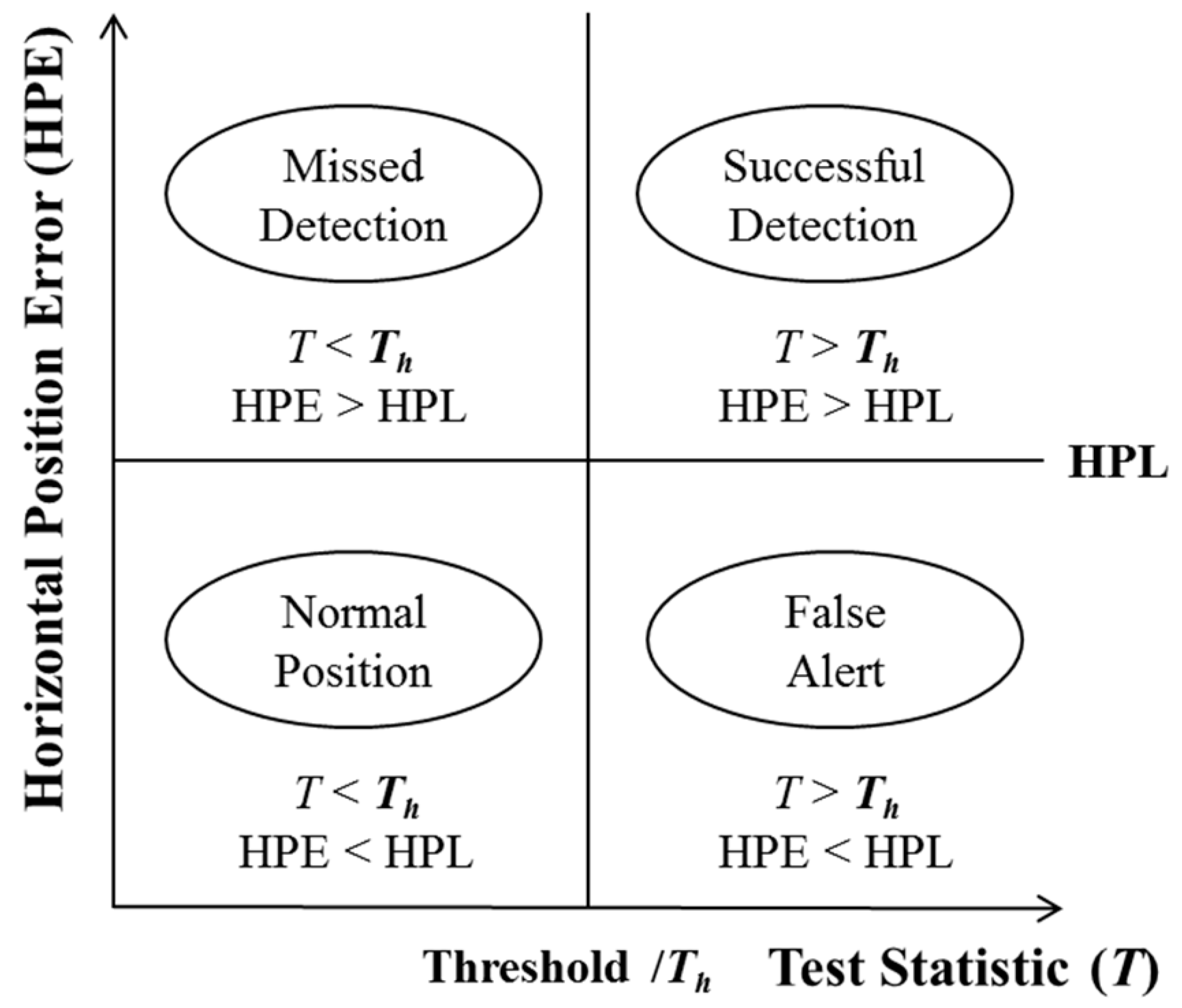
2.2.1. Fault Detection
2.2.2. HPL and the Availability of PLRAIM
3. Experiment and Analyses
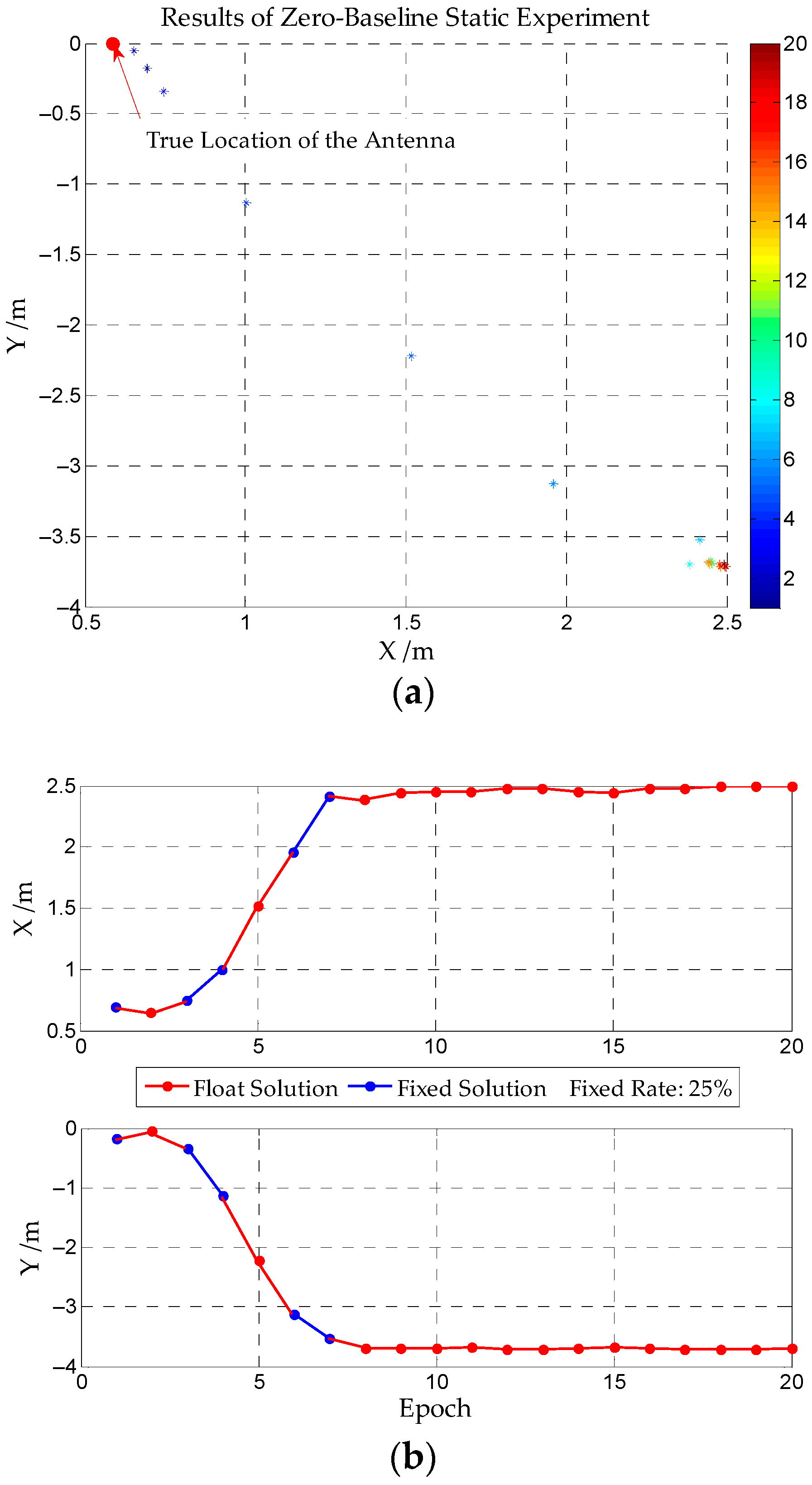
3.1. Static Experiment with Zero-Baseline
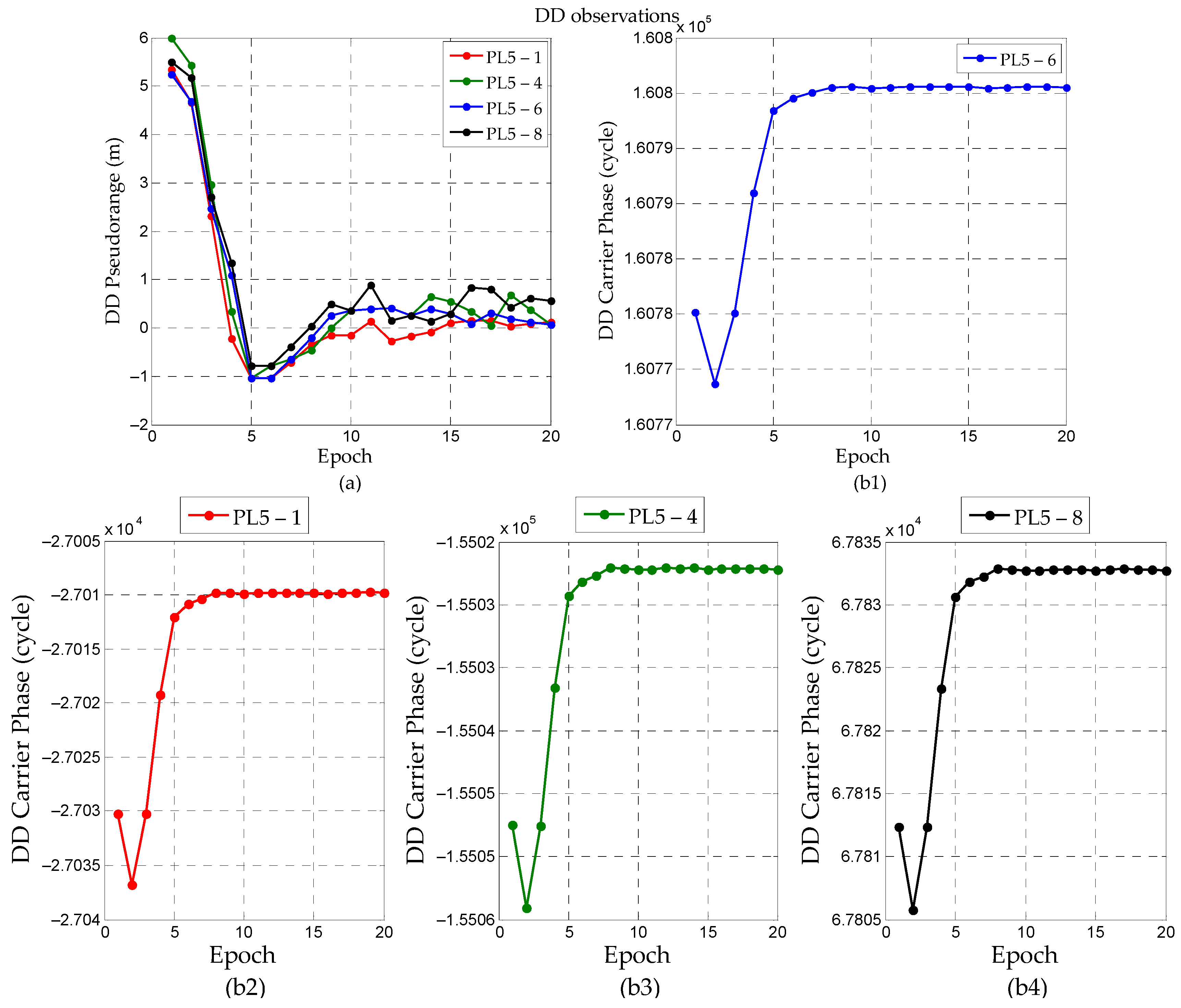
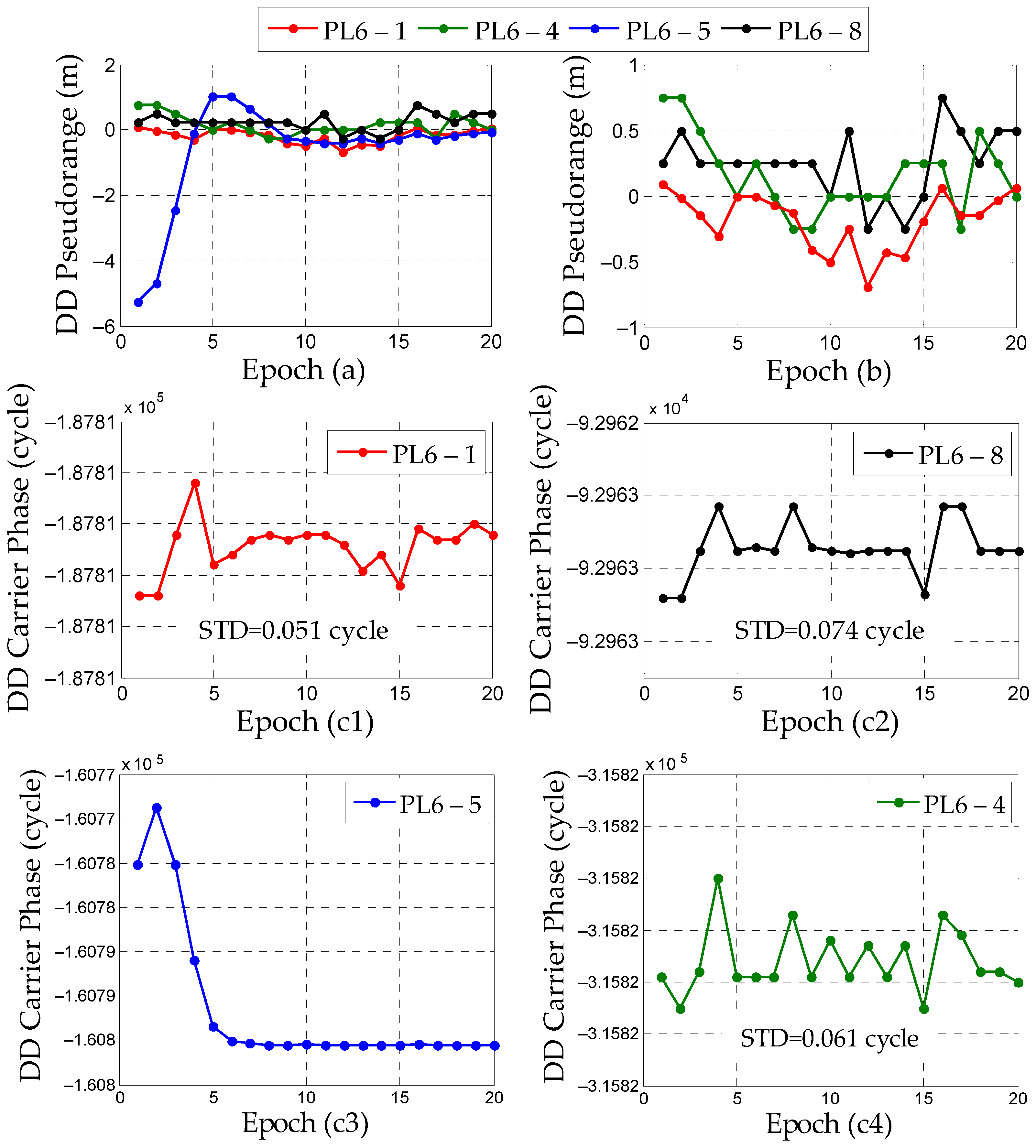
3.1.1. Fault Identification
3.1.2. Fault Exclusion
3.2. Dynamic Experiment
3.2.1. Fault Identification
3.2.2. Fault Exclusion
3.2.3. The Horizontal Protection Level
4. Conclusions and Discussion
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| DD | Double differenced |
| GNSS | Global navigation satellite system |
| INS | Inertial Navigation System |
| PL | Pseudolite |
| AR | Ambiguity resolution |
| CRAIM | Carrier phase-based RAIM |
| PRAIM | Pseudorange-based RAIM |
| PLRAIM | Pseudolite based RAIM |
| HPL | Horizontal protection level |
| HAL | Horizontal alert limit |
| HPE | Horizontal positioning error |
| MI | Misleading information |
| HMI | Hazardously MI |
| MDB | Detectable deviation bias |
| RF | Radio frequency |
| FA | False alert |
| MD | Missed detection |
| KPI | Known point initialization |
| PPP | Precise point positioning |
| RTK | Real-time kinematic positioning |
| EKF | Extended Kalman filter |
| SSE | The sum of squares due to error |
| USRP | Universal software radio peripheral |
| rpl | Reference pseudolite |
| npl | Number of visible pseudolites |
| AFM | Ambiguity function method |
| STD | Standard deviation |
| RMS | Root mean square |
References
- Su, J.; Yao, Z.; Lu, M. An improved position determination algorithm based on nonlinear compensation for ground-based positioning systems. IEEE Access 2019, 7, 23675–23689. [Google Scholar] [CrossRef]
- Wang, J. Pseudolite applications in positioning and navigation progress and problems. J. Glob. Position. Syst. 2002, 1, 48–56. [Google Scholar] [CrossRef]
- Dai, L.; Wang, J.; Rizos, C.; Han, S. Pseudo-satellite applications in deformation monitoring. GPS Solut. 2002, 5, 80–87. [Google Scholar] [CrossRef]
- Li, X.; Zhang, P.; Guo, J.; Wang, J.; Qiu, W. A new method for single-epoch ambiguity resolution with indoor pseudolite positioning. Sensors 2017, 17, 921. [Google Scholar] [CrossRef]
- Wang, T.; Yao, Z.; Lu, M. On-the-fly ambiguity resolution based on double-differential square observation. Sensors 2018, 18, 2495. [Google Scholar] [CrossRef]
- Wang, T.; Yao, Z.; Lu, M. On-the-fly ambiguity resolution involving only carrier phase measurements for stand-alone ground-based positioning systems. GPS Solut. 2019, 23, 36. [Google Scholar] [CrossRef]
- Counselman, C.C.; Gourevitch, S.A. Miniature interferometer terminals for earth surveying: Ambiguity and multipath with Global Positioning System. IEEE Trans. Geosci. Remote Sens. 1981, GE-19, 244–252. [Google Scholar] [CrossRef]
- Bonenberg, L.K. Closely-Coupled Integration of Locata and GPS for Engineering Applications. Ph.D. Thesis, University of Nottingham, Nottingham, UK, 2014. [Google Scholar]
- Rizos, C.; Roberts, G.; Barnes, J.; Gambale, N. Experimental results of Locata: A high accuracy indoor positioning system. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010. [Google Scholar]
- Guo, X.; Zhou, Y.; Wang, J.; Liu, K.; Liu, C. Precise point positioning for ground-based navigation systems without accurate time synchronization. GPS Solut. 2018, 22, 34. [Google Scholar] [CrossRef]
- Kim, C.; So, H.; Lee, T.; Kee, C. A pseudolite-based positioning system for legacy GNSS receivers. Sensors 2014, 14, 6104–6123. [Google Scholar] [CrossRef] [PubMed]
- Xu, R.; Chen, W.; Xu, Y.; Ji, S. A new indoor positioning system architecture using GPS signals. Sensors 2015, 15, 10074–10087. [Google Scholar] [CrossRef] [PubMed]
- Fujii, K.; Sakamoto, Y.; Wang, W.; Arie, H.; Schmitz, A.; Sugano, S. Hyperbolic positioning with antenna arrays and multi-channel pseudolite for indoor localization. Sensors 2015, 15, 25157–25175. [Google Scholar] [CrossRef] [PubMed]
- Wan, X.G.; Zhan, X.Q.; Du, G. Carrier phase method for indoor pseudolite positioning system. Appl. Mech. Mater. 2011, 130–134, 2064–2067. [Google Scholar] [CrossRef]
- Zhang, P.; Sun, F.; Xu, Y.; Wang, J. Indoor pseudolite positioning based on interferometric measurement of carrier phase. In Proceedings of the China Satellite Navigation Conference (CSNC), Changsha, China, 18–20 May 2016; Sun, J., Liu, J., Fan, S., Wang, F., Eds.; Springer: Singapore, 2016. [Google Scholar]
- Zhao, Y.; Zhang, P.; Guo, J.; Li, X.; Wang, J.; Yang, F.; Wang, X. A new method of high-precision positioning for an indoor pseudolite without using the known point initialization. Sensors 2018, 18, 1977. [Google Scholar] [CrossRef] [PubMed]
- Bhattacharyya, S.; Gebre-Egziabher, D. Kalman filter–based RAIM for GNSS receivers. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 2444–2459. [Google Scholar] [CrossRef]
- Sturza, M.A. Navigation system integrity monitoring using redundant measurements. Navigation 1988, 35, 483–501. [Google Scholar] [CrossRef]
- Parkinson, B.W.; Axelrad, P. Autonomous GPS integrity monitoring using the pseudorange residual. Navigation 1988, 35, 255–274. [Google Scholar] [CrossRef]
- Joerger, M.; Pervan, B. Kalman filter–based integrity monitoring against sensor faults. J. Guid. Control Dyn. 2013, 36, 349–361. [Google Scholar] [CrossRef]
- Feng, S.; Ochieng, W.; Moore, T.; Hill, C.; Hide, C. Carrier phase-based integrity monitoring for high-accuracy positioning. GPS Solut. 2009, 13, 13–22. [Google Scholar] [CrossRef]
- Abuhashim, T.S.; Abdel-Hafez, M.F.; Al-Jarrah, M.A. Building a robust integrity monitoring algorithm for a low cost GPS-aided-INS system. Int. J. Control Autom. Syst. 2010, 8, 1108–1122. [Google Scholar] [CrossRef]
- Nowak, A. The proposal to snapshot raim method for GNSS vessel receivers working in poor space segment geometry. Pol. Marit. Res. 2015, 22, 3–8. [Google Scholar] [CrossRef]
- Hewitson, S.; Wang, J. GNSS receiver autonomous integrity monitoring for multiple outlines. J. Navig. 2006, 4, 47–54. [Google Scholar]
- Na, L.; Lin, Z.; Liang, L.; Jia, C. Integrity monitoring of high-accuracy GNSS-based attitude determination. GPS Solut. 2018, 22, 120. [Google Scholar]
- Yun, H.; Yun, Y.; Kee, C. Carrier phase-based RAIM algorithm using a gaussian sum filter. J. Navig. 2011, 64, 75–90. [Google Scholar] [CrossRef]
- Shi, X. Carrier-Phase Based Real-time Static and Kinematic Precise Point Positioning Using GPS and GALILEO. Ph.D. Thesis, Imperial College, London, London, UK, 2010. [Google Scholar]
- Jokinen, A.; Feng, S.; Schuster, W.; Ochieng, W.; Hideb, C.; Mooreb, T.; Hill, C. Integrity monitoring of fixed ambiguity Precise Point Positioning (PPP) solutions. Geo-Spat. Inf. Sci. 2013, 16, 141–148. [Google Scholar] [CrossRef][Green Version]
- Schuster, W.; Bai, J.; Feng, S.J.; Ochieng, W. Integrity monitoring algorithms for airport surface movement. GPS Solut. 2012, 16, 65–75. [Google Scholar] [CrossRef]
- Li, L.; Wang, H.; Jia, C.; Zhao, L.; Zhao, Y. Integrity and continuity allocation for the RAIM with multiple constellations. GPS Solut. 2017, 21, 1503–1513. [Google Scholar] [CrossRef]
- Li, L.; Jia, C.; Zhao, L.; Yang, F.; Li, Z. Integrity monitoring-based ambiguity validation for triple-carrier ambiguity resolution. GPS Solut. 2017, 21, 797–810. [Google Scholar] [CrossRef]
- Liu, Y.; Lian, B. Indoor pseudolite relative localization algorithm with kalman filter. Acta Phys. Sin. 2014, 63, 1–7. [Google Scholar]
- Cellmer, S.; Wielgosz, P.; Rzepecka, Z. Modified ambiguity function approach for GPS carrier phase positioning. J. Geod. 2010, 84, 267–275. [Google Scholar] [CrossRef]
- Alfred, L. GPS Satellite Surveying, 3rd ed.; Wiley: New York, NY, USA, 2004. [Google Scholar]
- Teunissen, P.J.G.; Kleusberg, A. GPS for Geodesy; Springer: Berlin, Germany, 1998. [Google Scholar]
- Koch, K.R.; Yang, Y. Robust Kalman filter for rank deficient observation models. J. Geod. 1998, 72, 436–444. [Google Scholar] [CrossRef]
- Ochieng, W.; Sauer, K.; Walsh, D.; Brodin, G.; Griffin, S.; Denney, M. GPS integrity and potential impact on aviation safety. J. Navig. 2003, 56, 51–65. [Google Scholar] [CrossRef]
- Weng, D.; Chen, W. SBAS enhancement using an independent monitor station in a local area. GPS Solut. 2019, 23, 12. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. The least-squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Li, X.; Zhang, P.; Huang, G.; Zhang, Q.; Guo, J.; Zhao, Y.; Zhao, Q. Performance analysis of indoor pseudolite positioning based on the unscented Kalman filter. GPS Solut. 2019, 23, 79. [Google Scholar] [CrossRef]
- Song, J.; Hou, C.; Xue, G. GNSS receiver autonomous integrity monitoring based on EKF. J. Tianjin Univ. Sci. Technol. 2017, 50, 405–410. [Google Scholar]

















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Guo, J.; Zou, J.; Zhang, P.; Zhang, D.; Li, X.; Huang, G.; Yang, F. A Holistic Approach to Guarantee the Reliability of Positioning Based on Carrier Phase for Indoor Pseudolite. Appl. Sci. 2020, 10, 1199. https://doi.org/10.3390/app10041199
Zhao Y, Guo J, Zou J, Zhang P, Zhang D, Li X, Huang G, Yang F. A Holistic Approach to Guarantee the Reliability of Positioning Based on Carrier Phase for Indoor Pseudolite. Applied Sciences. 2020; 10(4):1199. https://doi.org/10.3390/app10041199
Chicago/Turabian StyleZhao, Yinzhi, Jiming Guo, Jingui Zou, Peng Zhang, Di Zhang, Xin Li, Gege Huang, and Fei Yang. 2020. "A Holistic Approach to Guarantee the Reliability of Positioning Based on Carrier Phase for Indoor Pseudolite" Applied Sciences 10, no. 4: 1199. https://doi.org/10.3390/app10041199
APA StyleZhao, Y., Guo, J., Zou, J., Zhang, P., Zhang, D., Li, X., Huang, G., & Yang, F. (2020). A Holistic Approach to Guarantee the Reliability of Positioning Based on Carrier Phase for Indoor Pseudolite. Applied Sciences, 10(4), 1199. https://doi.org/10.3390/app10041199