Regularization-Based Dual Adaptive Kalman Filter for Identification of Sudden Structural Damage Using Sparse Measurements


Abstract
Featured Application
Abstract
1. Introduction
2. Background: Identification of Dynamic Systems by Unscented Kalman Filter
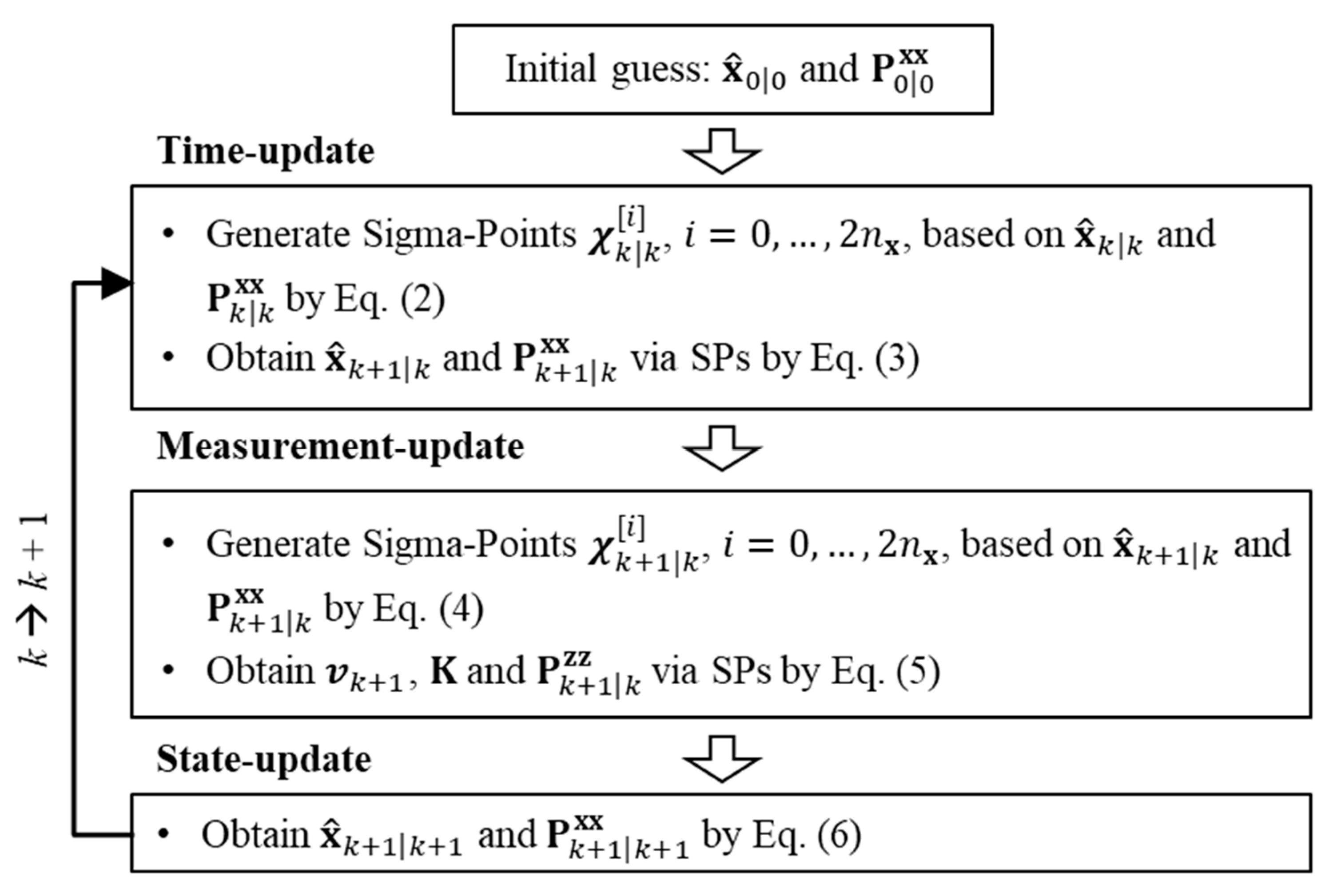
2.1. A Brief Review of Unscented Kalman Filter
2.2. Applications of Filter Methods and Practical Issues
3. Proposed Method: Adaptive Unscented Kalman Filter Using Sparse Measurements of Accelerations
3.1. Regularization-Based State-Space Model
3.2. Dual Adaptive Filtering for Measurement Noise Estimation
4. Numerical Investigations
4.1. SI under Simulated Damage Scenarios
4.2. Tuning Process Using Particle Swarm Optimization
4.3. Further Investigations Using Different Ground Motions
5. Conclusions and Topics for Future Study
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Adaptive Tracking Technique Using Particle Filter
Appendix B. MS-KFPE
References
- Tarantola, A. Inverse Problem Theory: Methods for Data Fitting and Model Parameter Estimation; Elsevier: Amsterdam, The Netherlands, 1987. [Google Scholar]
- Lee, S.-H.; Song, J. Bayesian-network-based system identification of spatial distribution of structural parameters. Eng. Struct. 2016, 127, 260–277. [Google Scholar] [CrossRef]
- Lee, S.-H.; Song, J. System Identification of Spatial Distribution of Structural Parameters Using Modified Transitional Markov Chain Monte Carlo Method. J. Eng. Mech. 2017, 143. [Google Scholar] [CrossRef]
- Lee, Y.-J.; Song, J. Risk Analysis of Fatigue-Induced Sequential Failures by Branch-and-Bound Method Employing System Reliability Bounds. J. Eng. Mech. 2011, 137, 807–821. [Google Scholar] [CrossRef]
- Lam, H.-F.; Yang, J.; Au, S.-K. Bayesian model updating of a coupled-slab system using field test data utilizing an enhanced Markov chain Monte Carlo simulation algorithm. Eng. Struct. 2015, 102, 144–155. [Google Scholar] [CrossRef]
- Richard, B.; Adelaide, L.; Cremona, C.; Orcesi, A. A methodology for robust updating of nonlinear structural models. Eng. Struct. 2012, 41, 356–372. [Google Scholar] [CrossRef]
- Simon, D. Optimal State Estimation: Kalman, H Infinity, and Nonlinear Approaches; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Brammer, K.; Siffling, G. Kalman-Bucy Filters; Artech House, Inc.: Norwood, MA, USA, 1989. [Google Scholar]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Van der Merwe, R.; Wan, E. Sigma-Point Kalman Filters for Probabilistic Inference in Dynamic State-Space Models. Ph.D. Thesis, Oregon Health & Science University, Portland, OR, USA, 2004. [Google Scholar]
- Yang, J.N.; Lin, S.; Huang, H.; Zhou, L. An adaptive extended Kalman filter for structural damage identification. Struct. Control. Health Monit. 2006, 13, 849–867. [Google Scholar] [CrossRef]
- Julier, S.; Uhlmann, J. Unscented Filtering and Nonlinear Estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Astroza, R.; Alessandri, A.; Conte, J.P. A dual adaptive filtering approach for nonlinear finite element model updating accounting for modeling uncertainty. Mech. Syst. Signal Process. 2019, 115, 782–800. [Google Scholar] [CrossRef]
- Odry, A.; Fullér, R.; Rudas, I.J.; Odry, P. Kalman filter for mobile-robot attitude estimation: Novel optimized and adaptive solutions. Mech. Syst. Signal Process. 2018, 110, 569–589. [Google Scholar] [CrossRef]
- Ritter, B.; Mora, E.; Schlicht, T.; Schild, A.; Konigorski, U. Adaptive Sigma-Point Kalman Filtering for Wind Turbine State and Process Noise Estimation. J. Phys. Conf. Ser. 2018, 1037. [Google Scholar] [CrossRef]
- Lee, D.-J.; Alfriend, K. Adaptive Sigma Point Filtering for State and Parameter Estimation. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference and Exhibit; American Institute of Aeronautics and Astronautics (AIAA), Providence, RI, USA, 16–19 August 2004. [Google Scholar]
- Liu, M.; Zang, S.; Zhou, D. Fast Leak Detection and Locations of Gas Pipelines Based on an Adaptive Particle Filter. Int. J. Appl. Math. Comput. Sci. 2005, 15, 541–550. [Google Scholar]
- Aucejo, M.; De Smet, O.; Deü, J.-F. Practical issues on the applicability of Kalman filtering for reconstructing mechanical sources in structural dynamics. J. Sound Vib. 2019, 442, 45–70. [Google Scholar] [CrossRef]
- Candy, J.V. Bayesian Signal Process: Classical, Modern, and Particle Filtering Methods; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2006. [Google Scholar]
- Van der Merwe, R.; Wan, E. The square-root unscented Kalman filter for state and parameter-estimation. In Proceedings of the 2001 IEEE International Conference on Acoustics, Speech, and Signal Processing, Proceedings (Cat. No.01CH37221). Salt Lake City, UT, USA, 7–11 May 2001; Volume 6, pp. 3461–3464. [Google Scholar]
- Wu, M.; Smyth, A.W. Application of the unscented Kalman filter for real-time nonlinear structural system identification. Struct. Control. Heal. Monit. 2007, 14, 971–990. [Google Scholar] [CrossRef]
- Chatzi, E.N.; Smyth, A.W. The unscented Kalman filter and particle filter methods for nonlinear structural system identification with non-collocated heterogeneous sensing. Struct. Control. Health Monit. 2009, 16, 99–123. [Google Scholar] [CrossRef]
- Gillijns, S.; De Moor, B. Unbiased minimum-variance input and state estimation for linear discrete-time systems with direct feedthrough. Automatica 2007, 43, 934–937. [Google Scholar] [CrossRef]
- Lourens, E.-M.; Papadimitriou, C.; Gillijns, S.; Reynders, E.; De Roeck, G.; Lombaert, G. Joint input-response estimation for structural systems based on reduced-order models and vibration data from a limited number of sensors. Mech. Syst. Signal Process. 2012, 29, 310–327. [Google Scholar] [CrossRef]
- Azam, S.E.; Chatzi, E.; Papadimitriou, C. A dual Kalman filter approach for state estimation via output-only acceleration measurements. Mech. Syst. Signal Process. 2015, 60, 866–886. [Google Scholar] [CrossRef]
- Azam, S.E.; Chatzi, E.; Papadimitriou, C.; Smyth, A. Experimental validation of the Kalman-type filters for online and real-time state and input estimation. J. Vib. Control. 2015, 23, 2494–2519. [Google Scholar] [CrossRef]
- Ding, Q.; Zhao, X.; Han, J. Adaptive unscented Kalman filters applied to visual tracking. In Proceedings of the 2012 IEEE International Conference on Information and Automation, Shenyang, China, 6–8 June 2012; pp. 491–496. [Google Scholar]
- Lee, H.S.; Kim, Y.H.; Park, C.J.; Park, H.W. A New Spatial Regularization Scheme for the Identification of the Geometric Shape of an Inclusion in a Finite Body. Int. J. Numer. Methods Eng. 1999, 46, 973–992. [Google Scholar] [CrossRef]
- Lee, H.S.; Park, C.J.; Park, H.W. Identification of geometric shapes and material properties of inclusions in two-dimensional finite bodies by boundary parameterization. Comput. Methods Appl. Mech. Eng. 2000, 181, 1–20. [Google Scholar] [CrossRef]
- Park, H.W.; Shin, S.; Lee, H.S. Determination of an optimal regularization factor in system identification with Tikhonov regularization for linear elastic continua. Int. J. Numer. Methods Eng. 2001, 51, 1211–1230. [Google Scholar] [CrossRef]
- Park, H.W.; Park, M.W.; Ahn, B.K.; Lee, H.S. 1-Norm-based regularization scheme for system identification of structures with discontinuous system parameters. Int. J. Numer. Methods Eng. 2006, 69, 504–523. [Google Scholar] [CrossRef]
- Hansen, P.C. Analysis of Discrete Ill-Posed Problems by Means of the L-Curve. SIAM Rev. 1992, 34, 561–580. [Google Scholar] [CrossRef]
- Brown, S.; Rutan, S. Adaptive Kalman Filtering. J. Res. Natl. Bur. Stand. 1985, 90, 403–407. [Google Scholar] [CrossRef]
- Naets, F.; Cuadrado, J.; Desmet, W. Stable force identification in structural dynamics using Kalman filtering and dummy-measurements. Mech. Syst. Signal Process. 2015, 50, 235–248. [Google Scholar] [CrossRef]
- Marini, F.; Walczak, B. Particle swarm optimization (PSO). A tutorial. Chemom. Intell. Lab. Syst. 2015, 149, 153–165. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Peak Relative Displacement | Occurrence-Time of Peak Response | |
|---|---|---|
| 1st story | 0.0559 | 8.58 s |
| 2nd story | 0.0454 | 4.94 s |
| 3rd story | 0.0393 | 5.23 s |
| 4th story | 0.0500 | 7.50 s |
| 5th story | 0.0568 | 9.92 s |
| 6th story | 0.0490 | 6.15 s |
| Scenario No. | Description of Scenario |
|---|---|
| Scenario 1 | E2 decreases by 25% at 4.94 s ➔ E1 decreases by 33% at 8.58 s |
| Scenario 2 | E4 at 7.50 s (25%) ➔ E1 at 8.58 s (33%) |
| Scenario 3 | E5 at 9.92 s (28%) ➔ E2 at 14.89 s (24%) |
| Scenario 4 | E3 at 5.23 s (24%) ➔ E2 at 8.58 s (24%) ➔ E2 at 16.00 s (41%) |
| Scenario 5 | E6 at 6.15 s (25%) ➔ E4 at 7.50 s (22%) ➔ E1 at 8.58 s (33%) |
| Scenario | Results of PSO | Initial Boundary | Changed Boundary | ||
|---|---|---|---|---|---|
| for x1 | for x2 | for x1 | for x2 | ||
| Scenario 1 | (3.51, 2.33) | [2, 4] | [1, 5] | - | - |
| Scenario 2 | (3.81, 2.19) | [2, 4] | [1, 5] | - | - |
| Scenario 3 | (3.98, 5) ➔ (3.88, 6.99) | [2, 4] | [1, 5] | - | [3, 7] |
| Scenario 4 | (4, 1.98) ➔ (4.21, 1.73) | [2, 4] | [1, 5] | [3, 5] | - |
| Scenario 5 | (3.95, 2.68) | [2, 4] | [1, 5] | ||
| Scenario | Description of Scenario | Results of PSO |
|---|---|---|
| Scenario 1’ | E2 decreases by 25% at 21.78 s ➔ E1 decreases by 33% at 25.45 | (4.12, 8.41) |
| Scenario 2’ | E4 at 22.45 s (25%) ➔ E3 at 22.94 s (25%) ➔ E1 at 25.45 s (33%) | (3.27, 9.05) |
| Scenario 3’ | E5 at 22.73 s (18%) ➔ E3 at 22.94 s (25%) ➔ E1 at 25.45 s (33%) | (3.40, 8.50) |
| Scenario 4’ | E5 at 22.73 s (19%) ➔ E5 at 45.47 s (38%) | (3.67, 8.53) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, S.-H.; Song, J. Regularization-Based Dual Adaptive Kalman Filter for Identification of Sudden Structural Damage Using Sparse Measurements. Appl. Sci. 2020, 10, 850. https://doi.org/10.3390/app10030850
Lee S-H, Song J. Regularization-Based Dual Adaptive Kalman Filter for Identification of Sudden Structural Damage Using Sparse Measurements. Applied Sciences. 2020; 10(3):850. https://doi.org/10.3390/app10030850
Chicago/Turabian StyleLee, Se-Hyeok, and Junho Song. 2020. "Regularization-Based Dual Adaptive Kalman Filter for Identification of Sudden Structural Damage Using Sparse Measurements" Applied Sciences 10, no. 3: 850. https://doi.org/10.3390/app10030850
APA StyleLee, S.-H., & Song, J. (2020). Regularization-Based Dual Adaptive Kalman Filter for Identification of Sudden Structural Damage Using Sparse Measurements. Applied Sciences, 10(3), 850. https://doi.org/10.3390/app10030850