Maximum Correntropy Criterion Based l1-Iterative Wiener Filter for Sparse Channel Estimation Robust to Impulsive Noise

Abstract
1. Introduction
2. MCC l1-IWF Formulation
3. Simulation Results
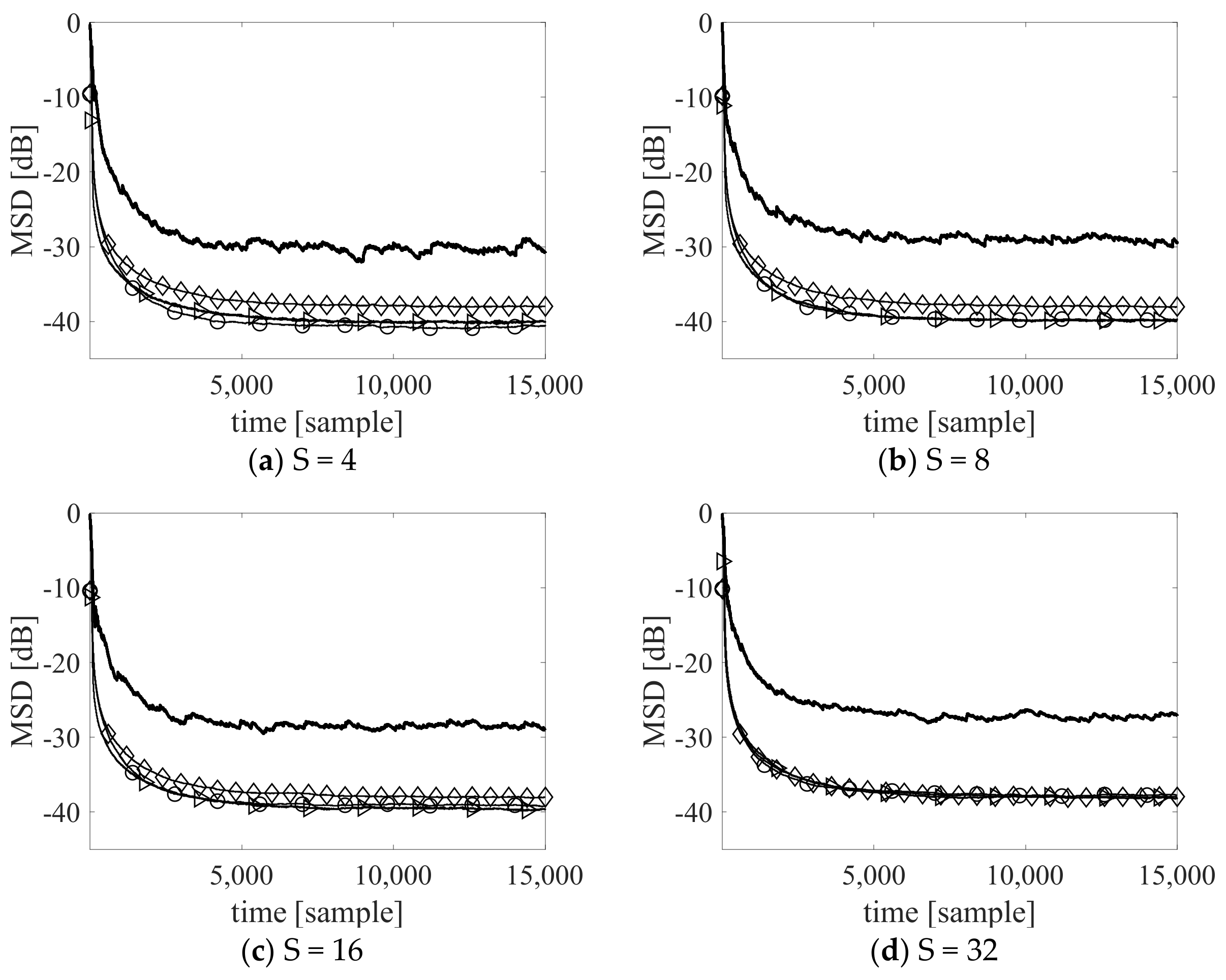
3.1. Estimation of Sparse Channels
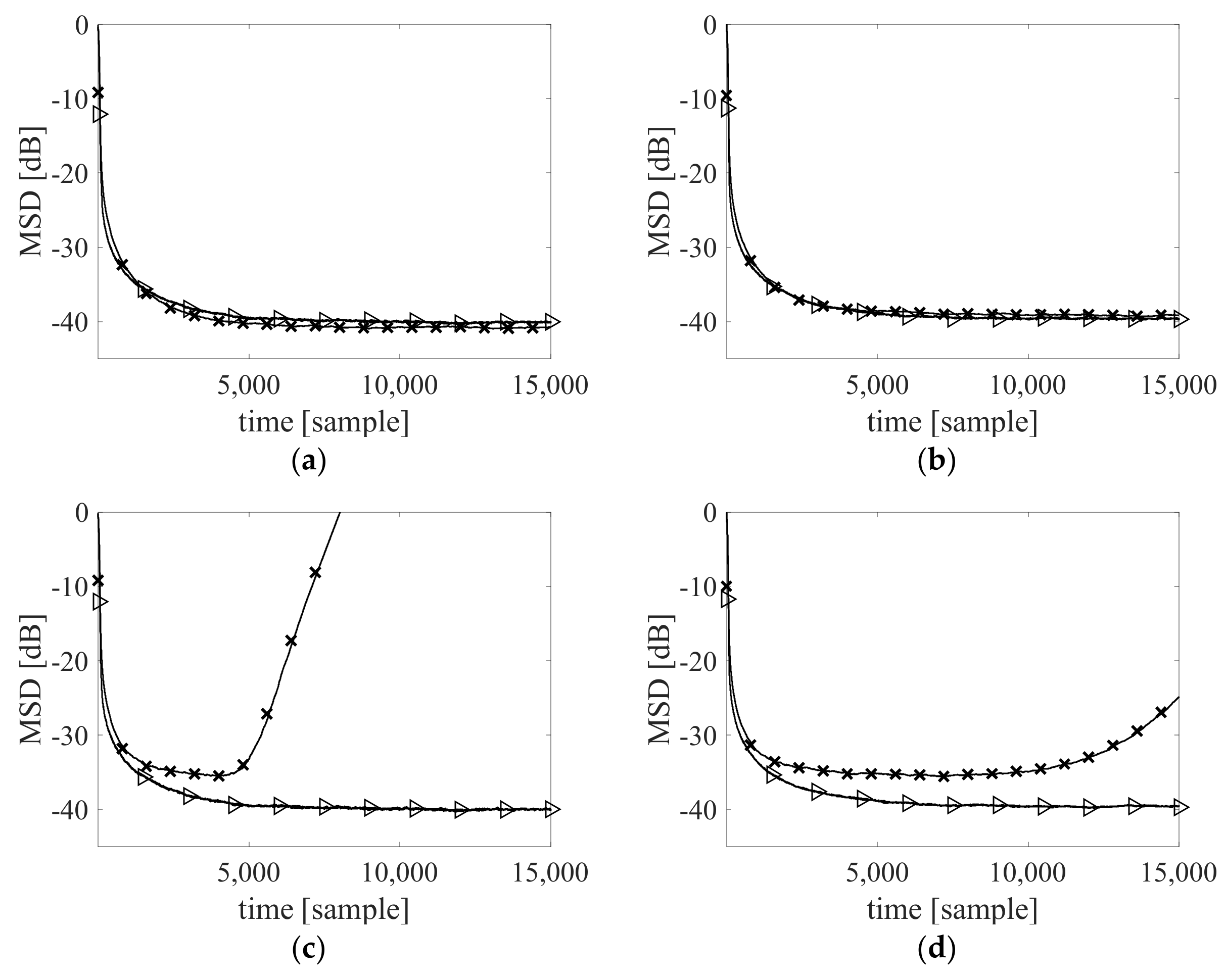
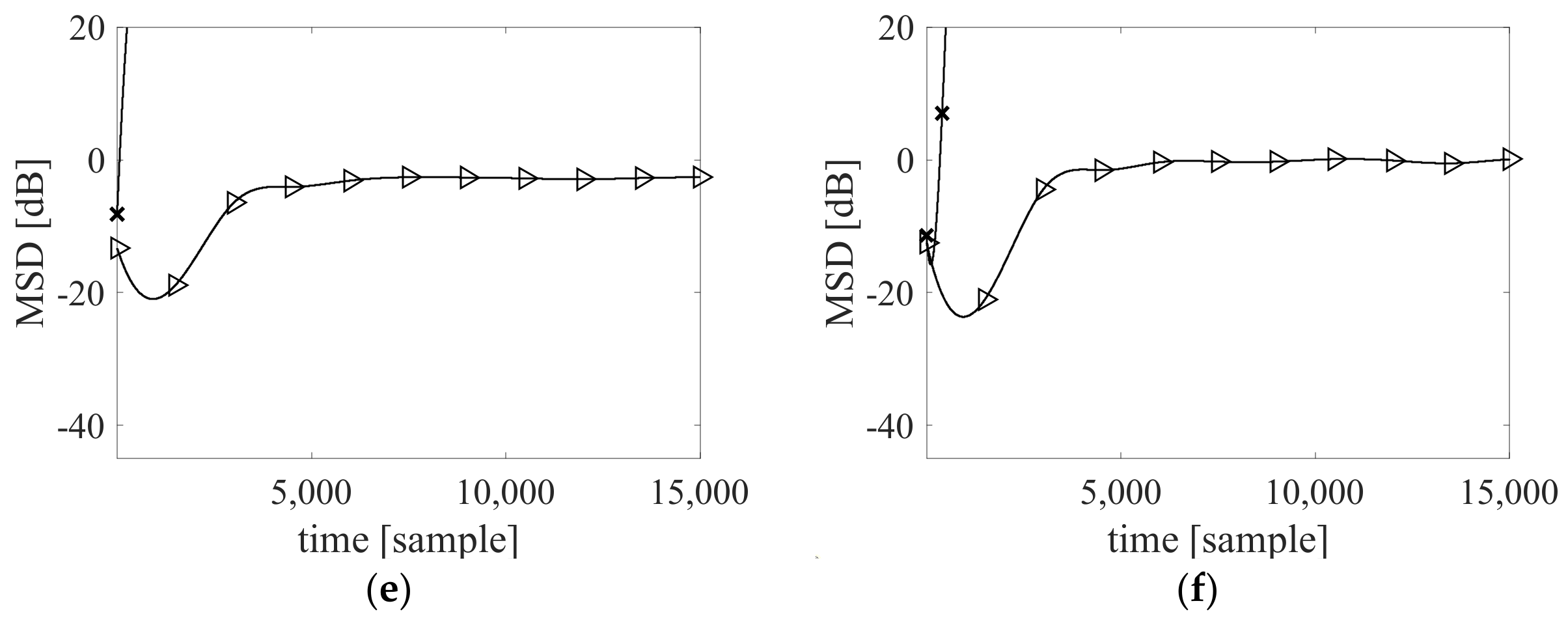
3.2. Numerical Robustness Experiment
4. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- Loganathan, P.; Khong, A.W.; Naylor, P.A. A class of sparseness-controlled algorithms for echo cancellation. IEEE Trans. Audio Speech Lang. Process. 2003, 17, 1591–1601. [Google Scholar] [CrossRef]
- Carbonelli, C.; Vedantam, S.; Mitra, U. Sparse channel estimation with zero tap detection. IEEE Trans. Wirel. Commun. 2007, 6, 1743–1763. [Google Scholar] [CrossRef]
- Yousef, N.R.; Sayed, A.H.; Khajehnouri, N. Detection of fading overlapping multipath components. Signal Process. 2006, 86, 2407–2425. [Google Scholar] [CrossRef]
- Singer, A.C.; Nelson, J.K.; Kozat, S.S. Signal processing for underwater acoustic communications. IEEE Commun. Mag. 2009, 47, 90–96. [Google Scholar] [CrossRef]
- Babadi, B.; Kalouptsidis, N.; Tarokh, V. SPARLS: The sparse RLS algorithm. IEEE Trans. Signal Process. 2010, 58, 4013–4025. [Google Scholar] [CrossRef]
- Eksioglu, E.M. RLS algorithm with convex regularization. IEEE Signal Process. Lett. 2011, 18, 470–473. [Google Scholar] [CrossRef]
- Eksioglu, E.M. Sparsity regularised recursive least squares adaptive filtering. IET Signal Process. 2011, 5, 480–487. [Google Scholar] [CrossRef]
- Das, B.; Chakraborty, M. Improved l0-RLS adaptive filter algorithms. Electron. Lett. 2017, 53, 1650–1651. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, Y.; Sun, D. VFF l1-norm penalised WL-RLS algorithm using DCD iterations for underwater acoustic communication. IET Commun. 2017, 11, 615–621. [Google Scholar] [CrossRef]
- Li, Y.; Wang, Y.; Jiang, T. Norm-adaption penalized least mean square/fourth algorithm for sparse channel estimation. Signal Process. 2016, 128, 243–251. [Google Scholar] [CrossRef]
- Jahromi, M.N.S.; Salman, M.S.; Hocanin, A. Convergence analysis of the zero-attracting variable step-size LMS algorithm for sparse system identification. Signal Image Video Process. 2013, 9, 1353–1356. [Google Scholar] [CrossRef]
- Li, Y.; Wang, Y.; Jiang, T. Sparse-aware setmembership NLMS algorithms and their application for sparse channel estimation and echo cancelation. AEU-Int. J. Electron. Commun. 2016, 70, 895–902. [Google Scholar] [CrossRef]
- Gu, Y.; Jin, J.; Mei, S. l0-norm constraint LMS algorithm for sparse system identification. IEEE Signal Process. Lett. 2009, 16, 774–777. [Google Scholar]
- Chen, Y.; Gu, Y.; Hero, A.O. Sparse LMS for system identification. In Proceedings of the IEEE International Conference on Acoustics, Speech Signal Processing, Taipei, Taiwan, 19–24 April 2009; pp. 3125–3128. [Google Scholar]
- Haykin, S. Adaptive Filter Theory, 5th ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2014. [Google Scholar]
- Liu, W.; Pokharel, P.P.; Principe, J.C. Correntropy: Properties and applications in non-Gaussian signal processing. IEEE Trans Signal Process. 2007, 55, 5286–5298. [Google Scholar]
- Chen, B.; Xing, L.; Liang, J.; Zheng, N.; Principe, J.C. Steady-state mean-square error analysis for adaptive filtering under the maximum correntropy criterion. IEEE Signal Process. Lett. 2014, 21, 880–884. [Google Scholar]
- Ma, W.; Qu, H.; Gui, G.; Xu, L.; Zhao, J.; Chen, B. Maximum correntropy criterion based sparse adaptive filtering algorithms for robust channel estimation under non-Gaussian environments. J. Frankl. Inst. 2015, 352, 2708–2727. [Google Scholar] [CrossRef]
- Chen, B.; Xing, L.; Zhao, H.; Zheng, N.; Principe, J.C. Generalized correntropy for robust adaptive filtering. IEEE Trans. Signal Process. 2016, 64, 3376–3387. [Google Scholar] [CrossRef]
- Zhang, X.; Li, K.; Wu, Z.; Fu, Y.; Zhao, H.; Chen, B. Convex regularized recursive maximum correntropy algorithm. Signal Process. 2016, 129, 12–16. [Google Scholar] [CrossRef]
- Ma, W.; Duan, J.; Chen, B.; Gui, G.; Man, W. Recursive generalized maximum correntropy criterion algorithm with sparse penalty constraints for system identification. Asian J. Control 2017, 19, 1164–1172. [Google Scholar] [CrossRef]
- Ahmad, M.S.; Kukrer, O.; Hocanin, A. Recursive inverse adaptive filtering algorithm. Digit. Signal Process. 2011, 21, 491–496. [Google Scholar] [CrossRef]
- Salman, M.S.; Kukrer, O.; Hocanin, A. Recursive inverse algorithm: Mean-square-error analysis. Digit. Signal Process. 2017, 66, 10–17. [Google Scholar] [CrossRef]
- Xi, B.; Liu, Y. Iterative Wiener Filter. Electron. Lett. 2013, 49, 343–344. [Google Scholar] [CrossRef]
- Khalid, S.; Abrar, S. Blind adaptive algorithm for sparse channel equalization using projections onto lp-ball. Electron. Lett. 2015, 51, 1422–1424. [Google Scholar] [CrossRef]
- Wang, W.; Zhao, J.; Qu, H.; Chen, B. A correntropy inspired variable step-size sign algorithm against impulsive noises. Signal Process. 2017, 141, 168–175. [Google Scholar] [CrossRef]
- Ma, W.; Qu, H.; Zhao, J. Estimator with forgetting factor of correntropy and recursive algorithm for traffic network prediction. In Proceedings of the 2013 25th Chinese Control and Decision Conference (CCDC), Guiyang, China, 25–27 May 2013; pp. 490–494. [Google Scholar]
- Sayed, A.H. Fundamentals of Adaptive Filtering; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2003; pp. 775–803. [Google Scholar]
- Proakis, J.G.; Manolakis, D.K. Digital Signal Processing, 4th ed.; Pearson Education Limited: London, UK, 2014; p. 35. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Initialization: ,,, . |
| For n = 1 … |
| end |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lim, J. Maximum Correntropy Criterion Based l1-Iterative Wiener Filter for Sparse Channel Estimation Robust to Impulsive Noise. Appl. Sci. 2020, 10, 743. https://doi.org/10.3390/app10030743
Lim J. Maximum Correntropy Criterion Based l1-Iterative Wiener Filter for Sparse Channel Estimation Robust to Impulsive Noise. Applied Sciences. 2020; 10(3):743. https://doi.org/10.3390/app10030743
Chicago/Turabian StyleLim, Junseok. 2020. "Maximum Correntropy Criterion Based l1-Iterative Wiener Filter for Sparse Channel Estimation Robust to Impulsive Noise" Applied Sciences 10, no. 3: 743. https://doi.org/10.3390/app10030743
APA StyleLim, J. (2020). Maximum Correntropy Criterion Based l1-Iterative Wiener Filter for Sparse Channel Estimation Robust to Impulsive Noise. Applied Sciences, 10(3), 743. https://doi.org/10.3390/app10030743