Optimal Control as a Tool for Innovation in Aerial Twisting on a Trampoline

Abstract
1. Introduction
2. Methods
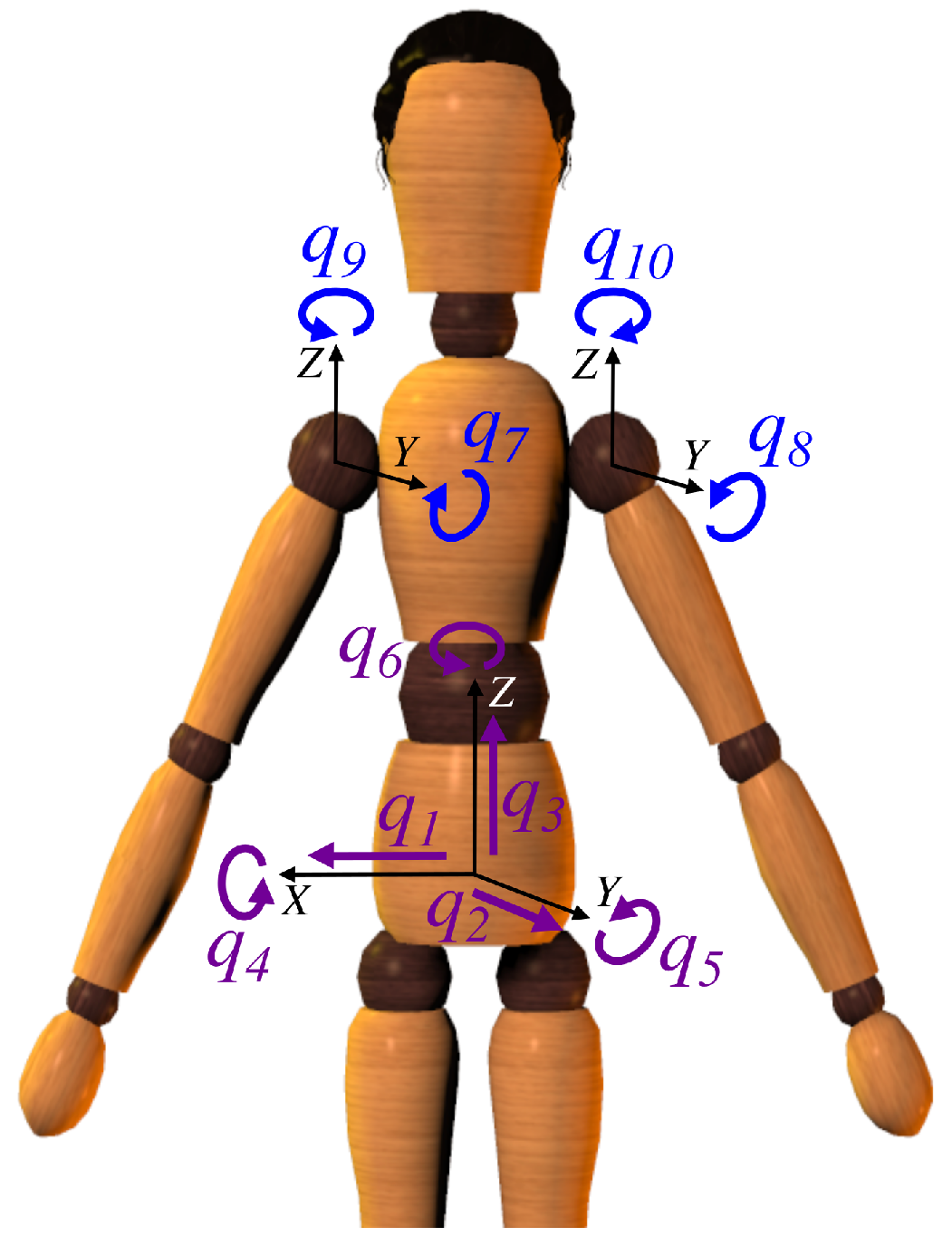
2.1. Skeletal Model
2.2. Formulation of the Optimization Problem
2.3. Practical Implementation
2.4. Multi-Start Approach
- Twist time history () linearly increasing from 0 to rotations.
- Number of shooting nodes .
- Random arm elevation ().
- Random arm torques ().
2.5. Robustness Analysis of the Optimal Solutions
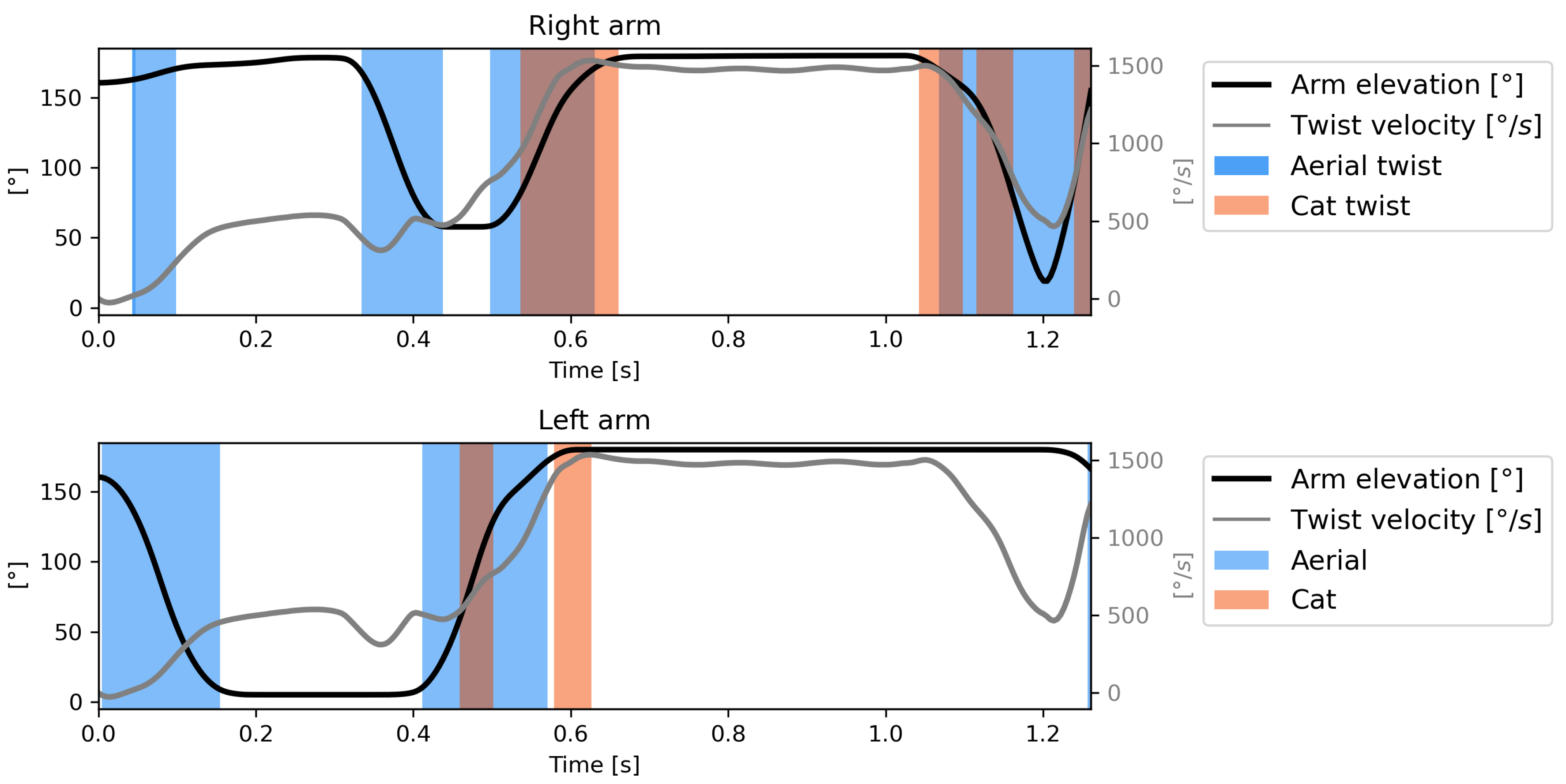
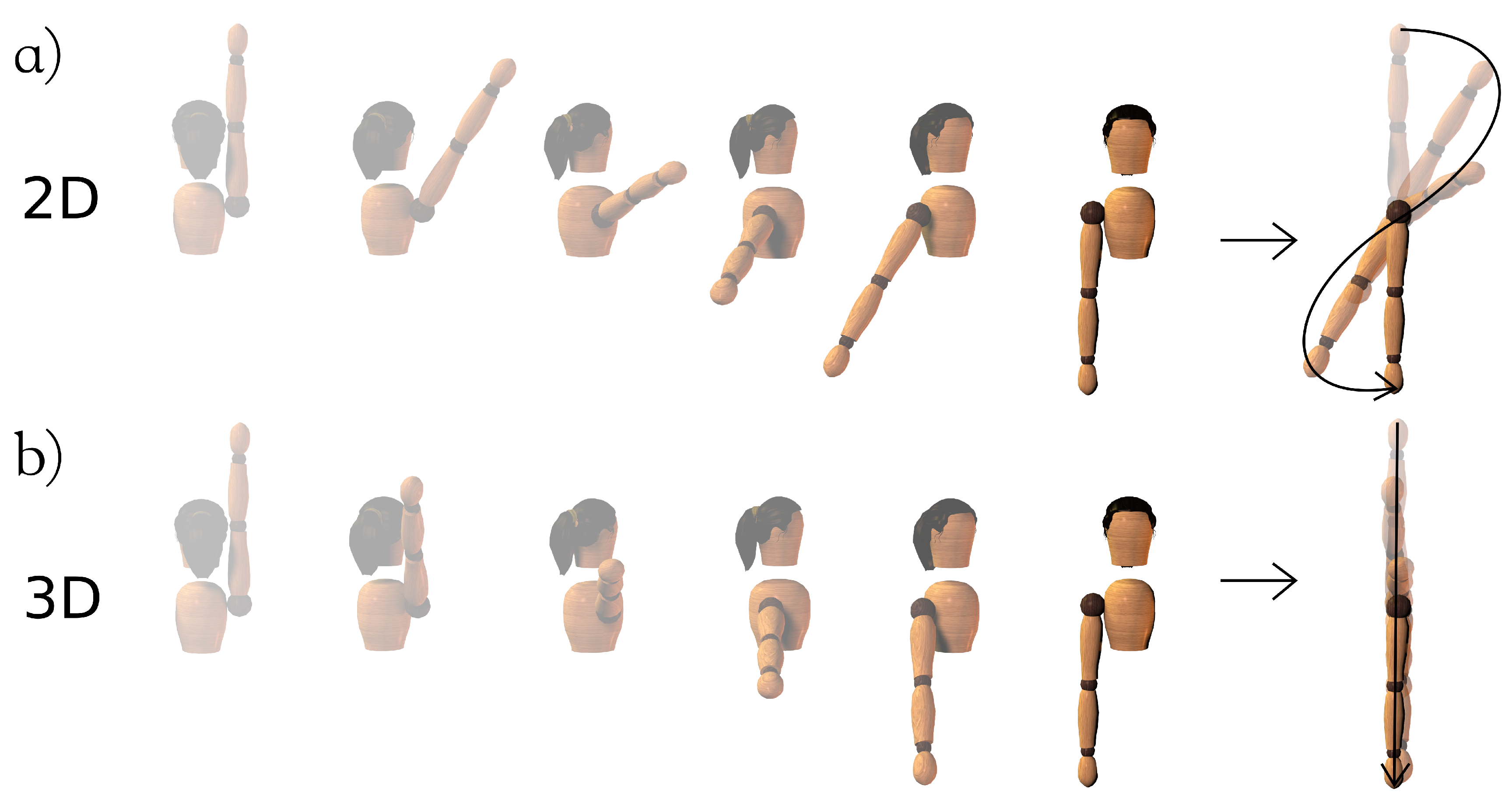
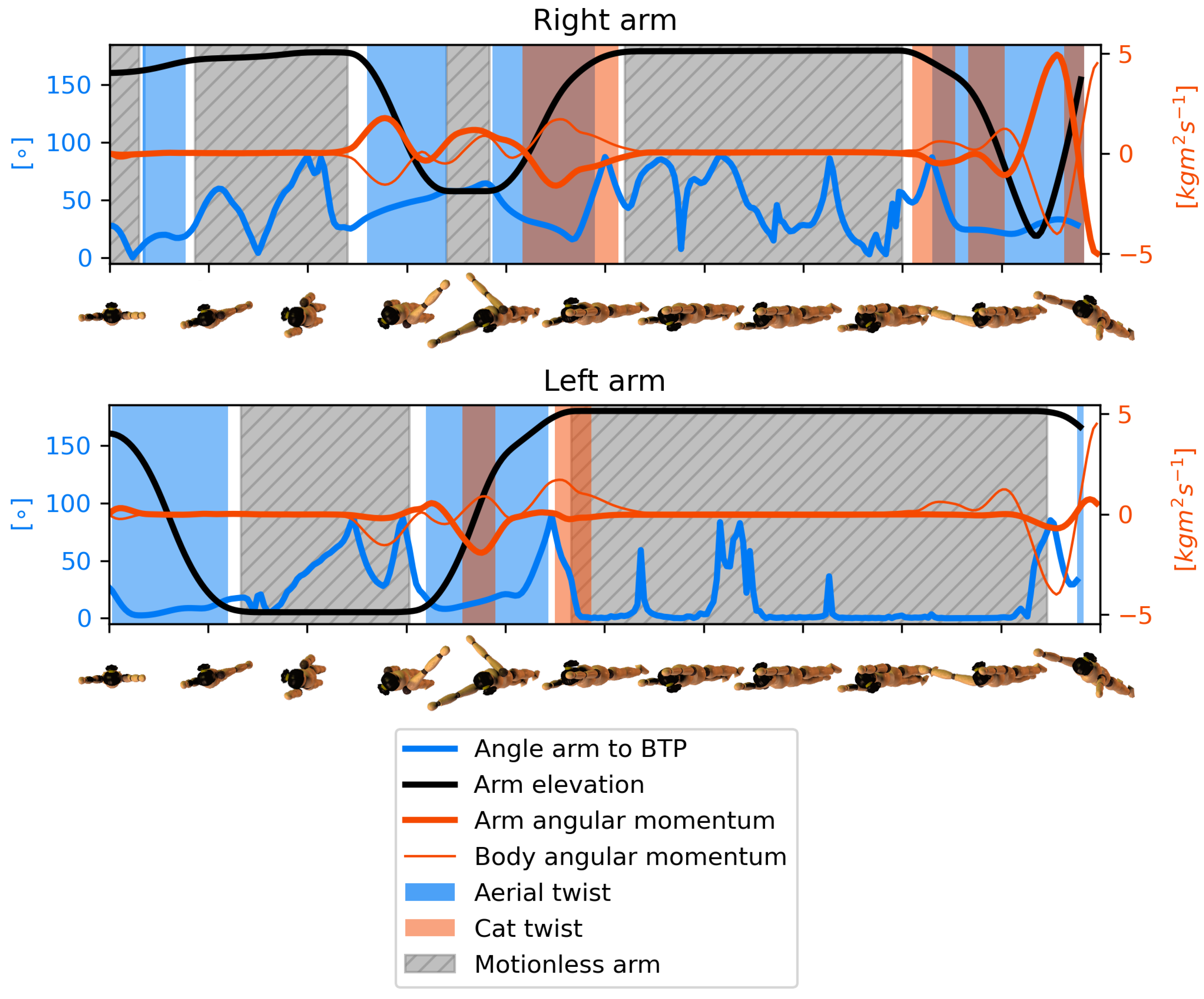
2.6. Biomechanical Analysis of the Aerial Twist Strategies
- The arm is moving ().
- The arm is not aligned with the body (the angle between the arm and the body is in the range ).
2.7. Biomechanical Analysis of the Cat Twist Strategies
- The twist (i.e., z-axis) component of the arm’s angular momentum in the global frame is non-null ( kg m s).
- The twist (i.e., z-axis) components of the arm’s and body’s angular momenta are of opposite signs ().
- The twist velocity resulting from the gravity-free simulation is significant (/s).
3. Results
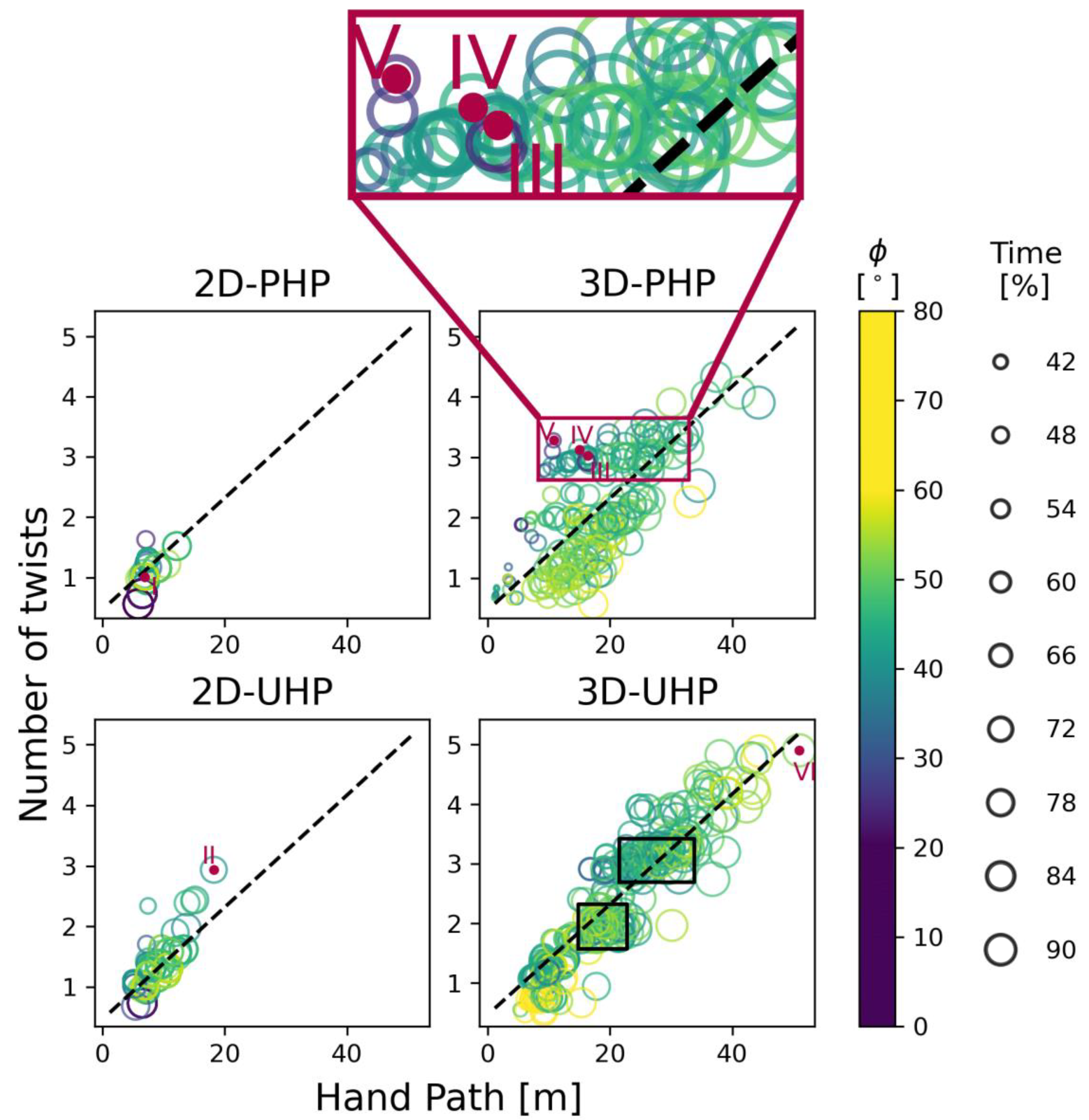
3.1. Distribution of Optimal Solutions
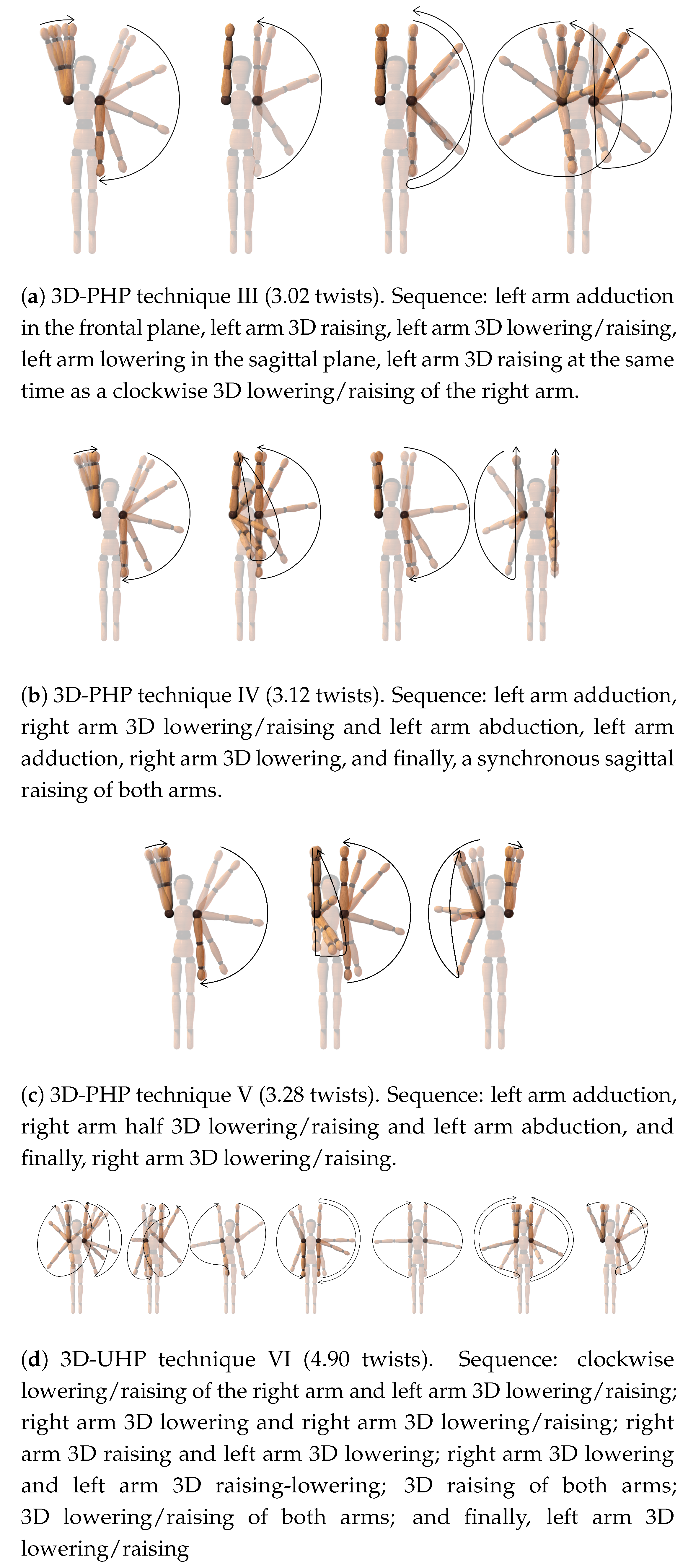
3.2. Analysis of Locally Optimal Selected Solutions
3.3. Robustness of Selected Techniques
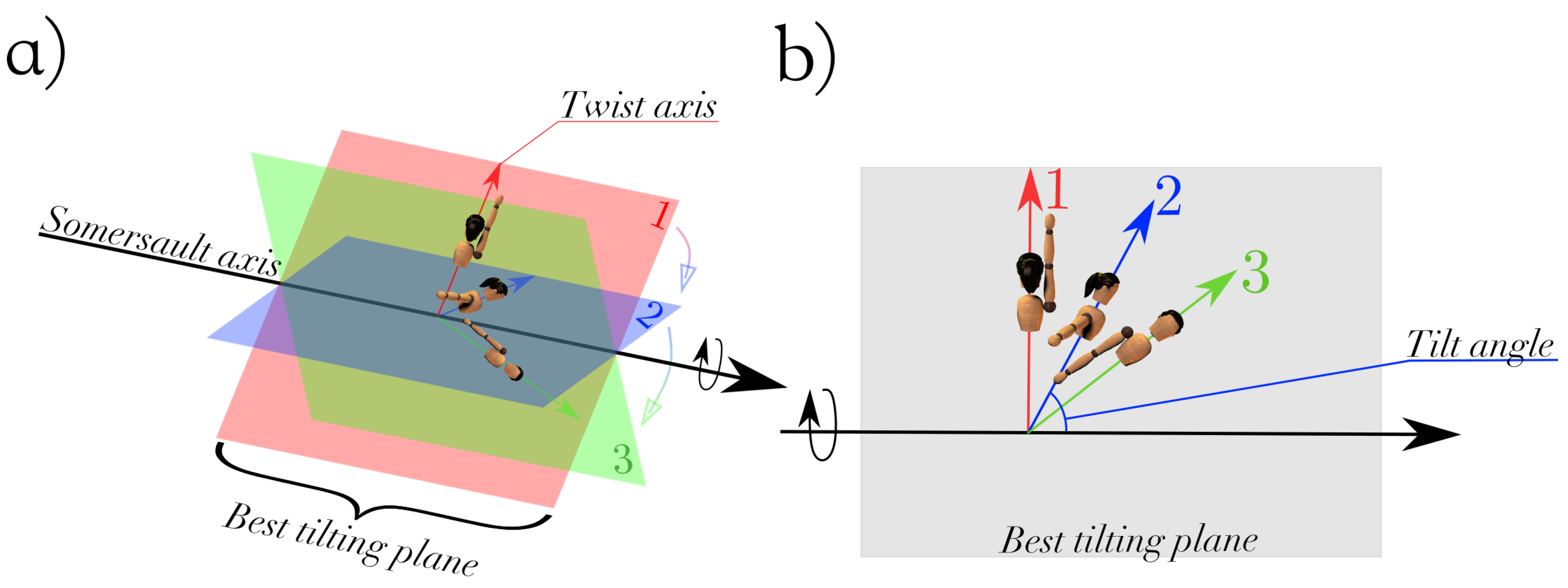
3.4. Best Tilting Plane
3.5. Cat Twist Strategies
4. Discussion
4.1. A Wide Range of Techniques
4.2. Robustness of Optimal Techniques
4.3. Best Tilting Plane
4.4. Limitations
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| OCP | Optimal control problem |
| BTP | Best tilting plane |
| DoF | Degree-of-freedom |
| PHP | penalized hand path |
| UHP | unpenalized hand path |
| RMS | root mean square |
Appendix A. The Best Tilting Plane


Appendix B. Cat and Aerial Contributions

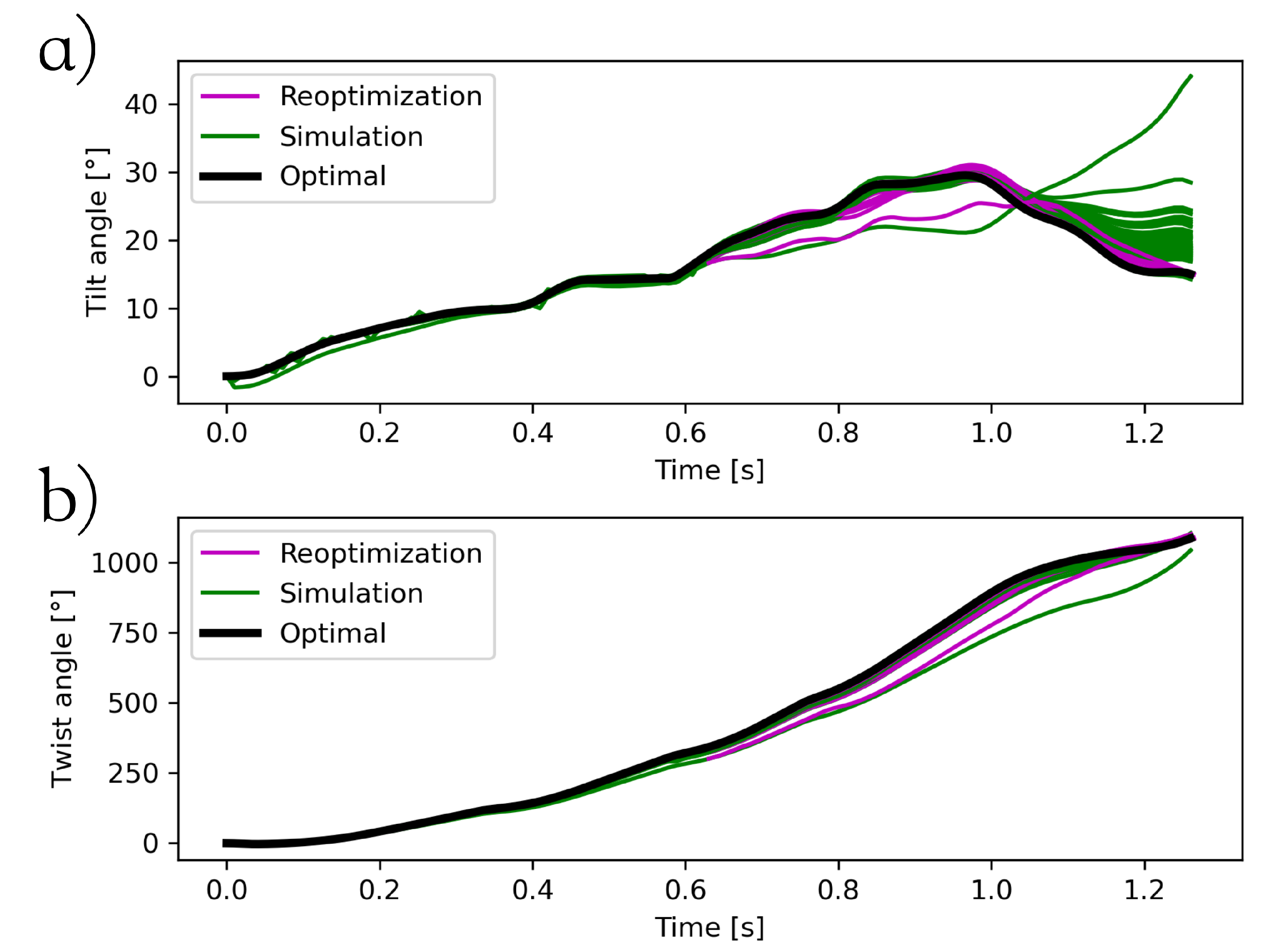
Appendix C. Reoptimization vs. Simulation

Appendix D. Performance of Cat Twist Strategies

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technique | I | II | III | IV | V | VI |
|---|---|---|---|---|---|---|
| Cat twist | − | − | ||||
| Total twist |
References
- Frohlich, C. The physics of somersaulting and twisting. Sci. Am. 1980, 242, 154–165. [Google Scholar] [CrossRef] [PubMed]
- Sanders, R.H. Effect of ability on twisting techniques in forward somersaults on the trampoline. J. Appl. Biomech. 1995, 11, 267–287. [Google Scholar] [CrossRef]
- Yeadon, M.F. Learning how to twist fast. In Applied Proceedings of the XVIIth International Symposium on Biomechanics in Sports–Acrobatics; School of Biomedical and Sport Sciences, Edith Cowan University: Perth, Australia, 1999; pp. 37–47. [Google Scholar]
- Dullin, H.R.; Tong, W. Twisting somersault. SIAM J. Appl. Dyn. Syst. 2016, 15, 1806–1822. [Google Scholar] [CrossRef]
- Yeadon, M.R. The biomechanics of twisting somersaults Part IV: Partitioning performances using the tilt angle. J. Sports Sci. 1993, 11, 219–225. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Yeadon, M.R. The limits of aerial twisting techniques in the aerials event of freestyle skiing. J. Biomech. 2013, 46, 1008–1013. [Google Scholar] [CrossRef]
- Bailly, F.; Charbonneau, E.; Danès, L.; Begon, M. Optimal 3D arm strategies for maximizing twist rotation during somersault of a rigid-body model. Multibody Syst. Dyn. 2020, 1–17. [Google Scholar] [CrossRef]
- Yeadon, M.R.; Mikulcik, E. The control of non-twisting somersaults using configuration changes. J. Biomech. 1996, 29, 1341–1348. [Google Scholar] [CrossRef][Green Version]
- Huchez, A.; Haering, D.; Holvoet, P.; Barbier, F.; Begon, M. Differences Between Expert and Novice Gymnasts Performance of a Counter Movement Forward in Flight on Uneven Bars. Sci. Gymnast. J. 2016, 8, 31–41. [Google Scholar]
- Sayyah, M.; Yeadon, M.; Hiley, M.J.; King, M.A. Adjustment in the Flight Phase of 1m Springboard Forward Pike Dives. ISBS Proc. Arch. 2017, 35, 16. [Google Scholar]
- Heinen, T.; Walter, N.; Hennig, L.; Jeraj, D. Spatial Perception of Whole-body Orientation Depends on Gymnasts’ Expertise. Sci. Gymnast. J. 2018, 10, 5–15. [Google Scholar]
- Balter, S.G.; Stokroos, R.J.; Akkermans, E.; Kingma, H. Habituation to galvanic vestibular stimulation for analysis of postural control abilities in gymnasts. Neurosci. Lett. 2004, 366, 71–75. [Google Scholar] [CrossRef]
- Hiley, M.J.; Yeadon, M.R. Investigating optimal technique in a noisy environment: Application to the upstart on uneven bars. Hum. Mov. Sci. 2013, 32, 181–191. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Mombaur, K. Performing Open-Loop Stable Flip-Flops—An Example for Stability Optimization and Robustness Analysis of Fast Periodic Motions. In Fast Motions in Biomechanics and Robotics; Springer: Berlin/Heidelberg, Germany, 2006; pp. 253–275. [Google Scholar]
- Ashby, B.M.; Delp, S.L. Optimal control simulations reveal mechanisms by which arm movement improves standing long jump performance. J. Biomech. 2006, 39, 1726–1734. [Google Scholar] [CrossRef] [PubMed]
- Spägele, T.; Kistner, A.; Gollhofer, A. A multi-phase optimal control technique for the simulation of a human vertical jump. J. Biomech. 1999, 32, 87–91. [Google Scholar] [CrossRef]
- Yeadon, M.R.; Hiley, M.J. The mechanics of the backward giant circle on the high bar. Hum. Mov. Sci. 2000, 19, 153–173. [Google Scholar] [CrossRef]
- Bharadwaj, S.; Duignan, N.; Dullin, H.R.; Leung, K.; Tong, W. The diver with a rotor. Indag. Math. 2016, 27, 1147–1161. [Google Scholar] [CrossRef][Green Version]
- Yeadon, M.R. Airborne Movements: Somersaults and Twists. In Handbook of Human Motion; Springer: Cham, Switzerland, 2017; pp. 1–19. [Google Scholar]
- Yeadon, M.R.; Hiley, M.J. Twist limits for late twisting double somersaults on trampoline. J. Biomech. 2017, 58, 174–178. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Yeadon, M.R. Twisting Somersaults; SB & MC: Loughborough, UK, 2015. [Google Scholar]
- Featherstone, R. Rigid Body Dynamics Algorithms; Springer: Cham, Switzerland, 2014. [Google Scholar]
- Yeadon, M.R. The simulation of aerial movement—II. A mathematical inertia model of the human body. J. Biomech. 1990, 23, 67–74. [Google Scholar] [CrossRef]
- Namdari, S.; Yagnik, G.; Ebaugh, D.D.; Nagda, S.; Ramsey, M.L.; Williams, G.R., Jr.; Mehta, S. Defining functional shoulder range of motion for activities of daily living. J. Shoulder Elb. Surg. 2012, 21, 1177–1183. [Google Scholar] [CrossRef]
- Wächter, A.; Biegler, L.T. On the implementation of an interior-point filter line-search algorithm for large-scale nonlinear programming. Math. Program. 2006, 106, 25–57. [Google Scholar] [CrossRef]
- Andersson, J.A.E.; Gillis, J.; Horn, G.; Rawlings, J.B.; Diehl, M. CasADi—A software framework for nonlinear optimization and optimal control. Math. Program. Comput. 2019, 11, 1–36. [Google Scholar] [CrossRef]
- Huchez, A.; Haering, D.; Holvoët, P.; Barbier, F.; Begon, M. Local versus global optimal sports techniques in a group of athletes. Comput. Methods Biomech. Biomed. Eng. 2015, 18, 829–838. [Google Scholar] [CrossRef] [PubMed]
- Decatoire, A. Analyse Tri-Dimensionnelle de La Gestion des Mouvements Vrillés en Gymnastique: La Simulation: Vers un Outil de Formation des Entraîneurs en Activités Acrobatiques. Ph.D. Thesis, Université de Poitiers, Poitiers, France, 2004. [Google Scholar]
- Hiley, M.J.; Yeadon, M.R. Optimisation of high bar circling technique for consistent performance of a triple piked somersault dismount. J. Biomech. 2008, 41, 1730–1735. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Grapton, X.; Lion, A.; Gauchard, G.C.; Barrault, D.; Perrin, P.P. Specific injuries induced by the practice of trampoline, tumbling and acrobatic gymnastics. Knee Surg. Sports Traumatol. Arthrosc. 2013, 21, 494–499. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Gu, Y.; Fan, X.; Cheng, H. Multi-Objective Optimization of Virtual Human Motion Posture for Assembly Operation Simulation. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Charlotte, NC, USA, 21–24 August 2016; American Society of Mechanical Engineers: New York, NY, USA; Volume 50077, p. V01AT02A056. [Google Scholar]
- Mombaur, K.; Clever, D. Inverse optimal control as a tool to understand human movement. In Geometric and Numerical Foundations of Movements; Springer: Cham, Switzerland, 2017; pp. 163–186. [Google Scholar]
- Tong, C.; Wolpert, D.M.; Flanagan, J.R. Kinematics and dynamics are not represented independently in motor working memory: Evidence from an interference study. J. Neurosci. 2002, 22, 1108–1113. [Google Scholar] [CrossRef]





| Start | Skill | End | |
|---|---|---|---|
| Standing position on the trampoline | Reasonable tilt | Landing position on the trampoline | |
| Arms upward | Realist arm amplitudes | Arms upward | |
| Realistic ejection velocities | |||
| Null velocity at each arm DoF | Arm velocities | Arm velocities | |
| Arm torques | Arm torques | Arm torques | |
| # | Type | Twists | Complexity | Effort | Convergence | |||
|---|---|---|---|---|---|---|---|---|
| [] | [m] | [Nm] | [] | [] | [%] | |||
| I | 2D-PHP | 56 | 87 | |||||
| II | 2D-UHP | 41 | 27 | |||||
| III | 3D-PHP | 42 | 91 | |||||
| IV | 3D-PHP | 45 | 82 | |||||
| V | 3D-PHP | 25 | 78 | |||||
| VI | 3D-UHP | 52 | 8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Charbonneau, E.; Bailly, F.; Danès, L.; Begon, M. Optimal Control as a Tool for Innovation in Aerial Twisting on a Trampoline. Appl. Sci. 2020, 10, 8363. https://doi.org/10.3390/app10238363
Charbonneau E, Bailly F, Danès L, Begon M. Optimal Control as a Tool for Innovation in Aerial Twisting on a Trampoline. Applied Sciences. 2020; 10(23):8363. https://doi.org/10.3390/app10238363
Chicago/Turabian StyleCharbonneau, Eve, François Bailly, Loane Danès, and Mickaël Begon. 2020. "Optimal Control as a Tool for Innovation in Aerial Twisting on a Trampoline" Applied Sciences 10, no. 23: 8363. https://doi.org/10.3390/app10238363
APA StyleCharbonneau, E., Bailly, F., Danès, L., & Begon, M. (2020). Optimal Control as a Tool for Innovation in Aerial Twisting on a Trampoline. Applied Sciences, 10(23), 8363. https://doi.org/10.3390/app10238363