Design of a Low-complexity Graph-Based Motion-Planning Algorithm for Autonomous Vehicles



Abstract
1. Introduction and Motivation
1.1. Motion Prediction-Based Decision Making Algorithms
1.2. Graph-Based Algorithms
- 1.
- Prediction of the motion of the surrounding vehicles.
- 2.
- Determination of the collision-free trajectories.
- 3.
- Computation of the feasible trajectories for the overtaking maneuver.
1.3. Neural-Network-Based Algorithms
1.4. Model Predictive Control-Based Trajectory Planning
1.5. Contributions of the Proposed Method
- 1.
- The core of the motion-planning algorithm is a graph-based method. The generation of the graph is mainly based on the lateral dynamics of the vehicle, which is presented in Section 2. Furthermore, the generated graph is extended with the result of the motion prediction in order to get a collision-free trajectory.
- 2.
- In the next step, the motion prediction of the surrounding vehicles must be performed. The motion of the vehicles is predicted using density functions. These functions are determined using the Next Generation Simulation (NGSIM) dataset. The computation of these function is detailed in Section 3.
- 3.
- Finally, the computation of the feasible trajectory is made using the neural-network-based approach.
2. Motion-Planning Graph-Based Algorithm
- 1.
- The longitudinal and lateral position of the trajectory must be the same, at the end point, as the coordinates of the given node: and using this, the initial yaw angle can be computed as: . This can be seen in Figure 1, in which two trajectories are connects at the (20,0.25) graph node.
- 2.
- The yaw angle at the end of the planned trajectory must be the same as (). can be computed as . Note that the can be determined from the previous edge . In order to guarantee the feasibility of the trajectory, the following equality must be guaranteed: .
2.1. Curvature Approximation of the Trajectories
- computing the possible lateral positions of the nodes,
- weighting the edges using the computed lateral accelerations.
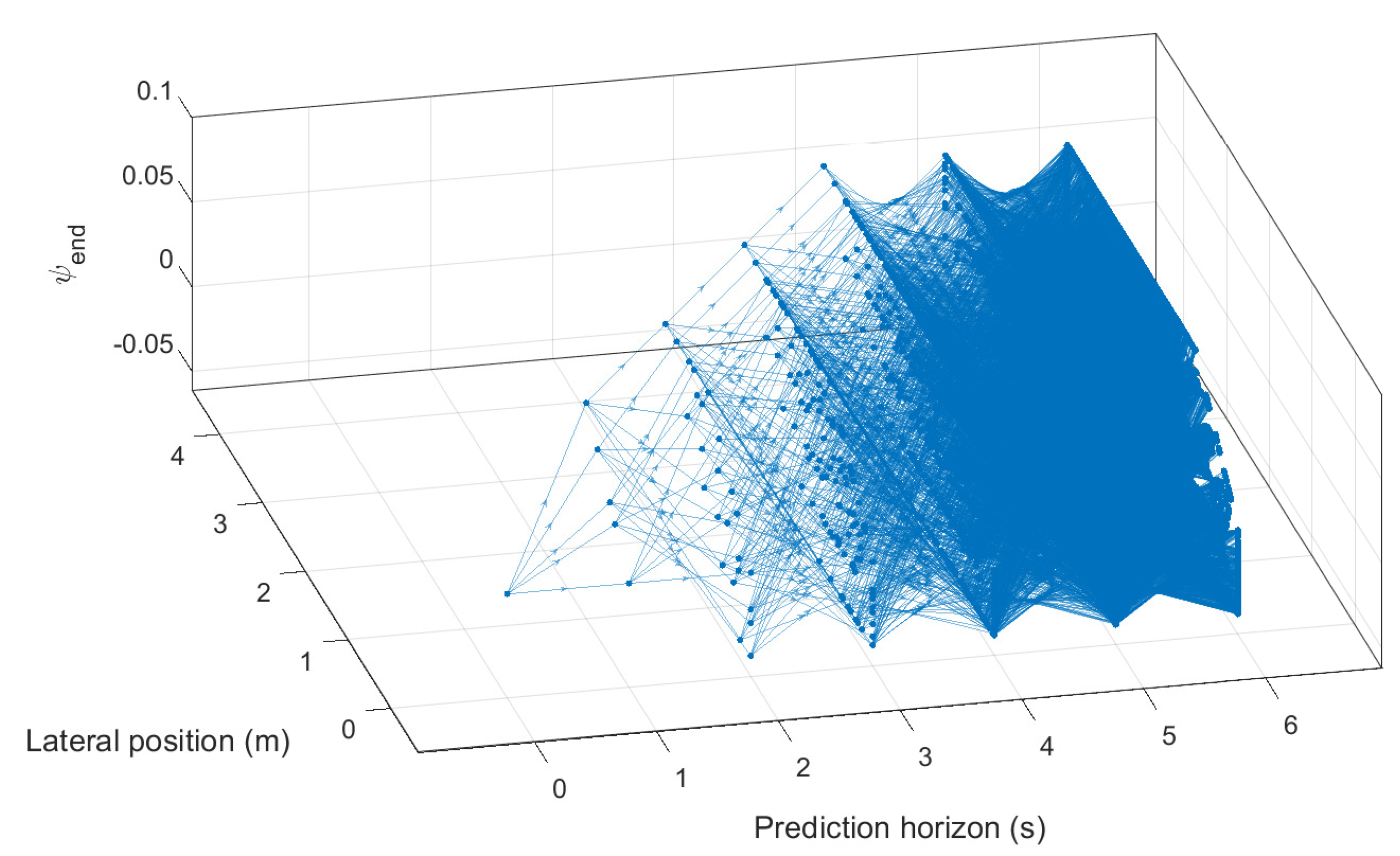
2.2. Computing the Lateral Positions of the Nodes
2.3. Computing the Weights of the Edges
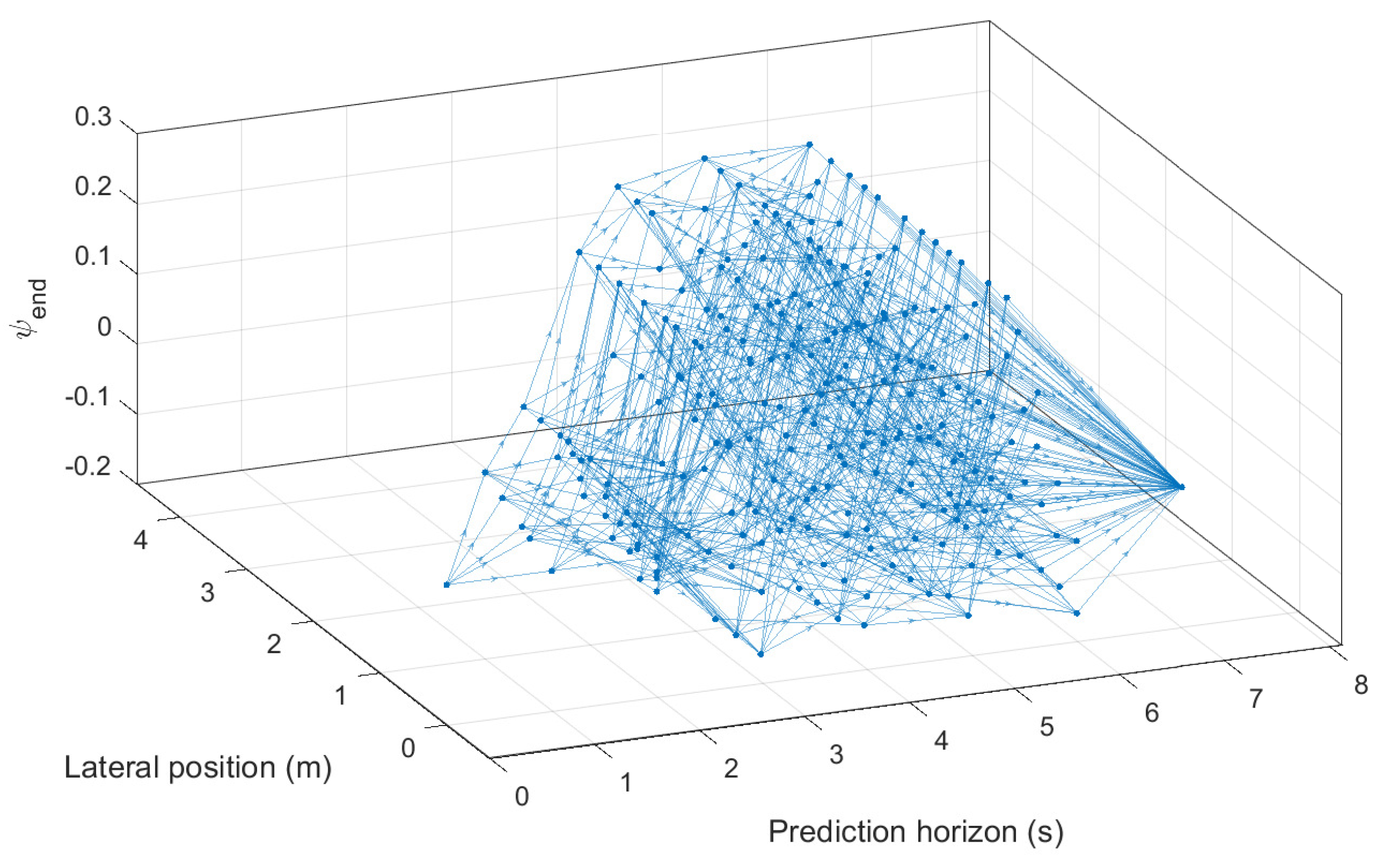
2.4. Reducing the Complexity of the Graph
3. Motion Prediction of the Surrounding Vehicles
3.1. Lateral Motion of the Vehicle
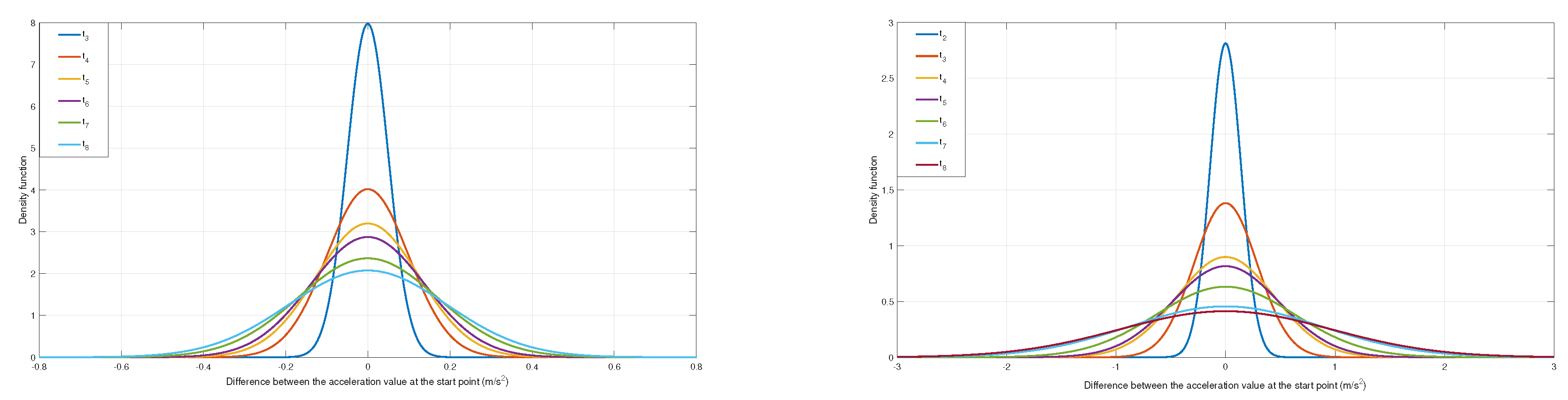
3.2. Longitudinal Motion of the Vehicles
3.3. Prediction of the Vehicle Motion
4. Architecture of the Algorithm
4.1. Decision Making and Trajectory Generation
4.2. Checking the Probabilities of Collisions
4.3. Structure of the Algorithm
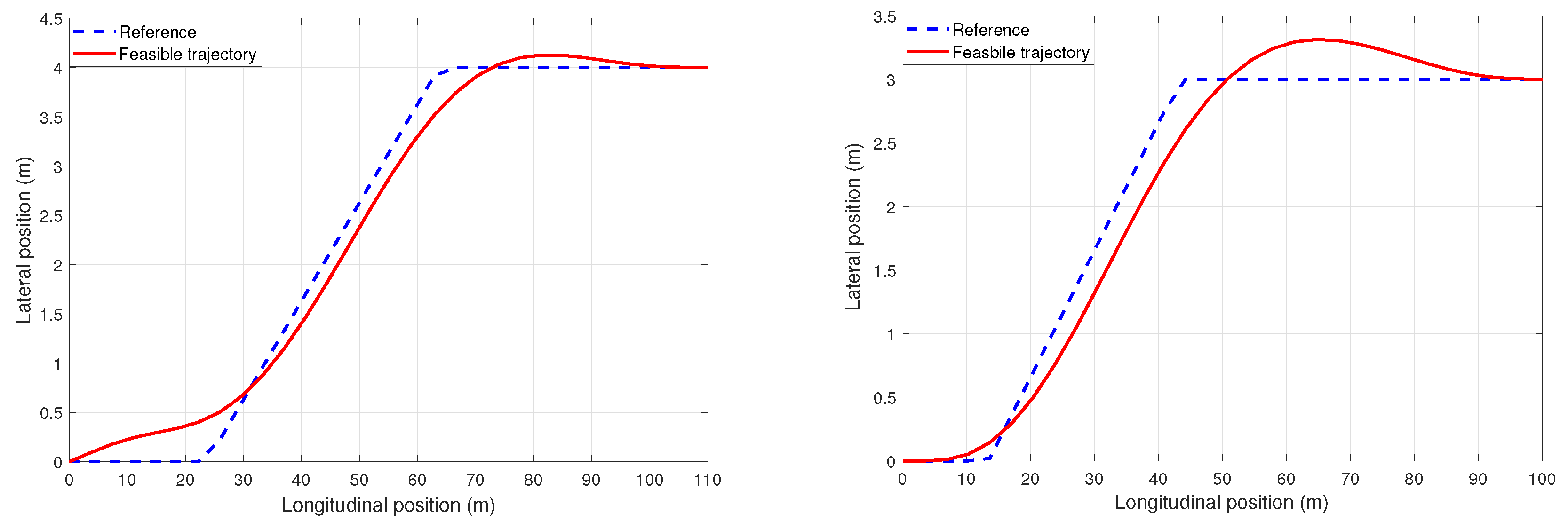
5. Simulation Example
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Trajectory Planning
Appendix A.1. The Lateral and Longitudinal Model of the Vehicle
Appendix A.2. Predictive Optimization Method
- Lateral position. It is necessary to limit the lateral error measured from the reference trajectory in order to avoid dangerous motion of the vehicle. Moreover, it is important to guarantee that the reference lateral position is reached by the planned trajectory at the end point. During the computation, the maximum deviation measured from the reference trajectory is set to .
- Yaw angle. Another important point of the trajectory planning is the yaw angle of the vehicle. The feasible trajectory must ensure that the yaw angle of the vehicle is the same as the yaw angle of the reference trajectory.
- Steering angle. The steering angle and its rate must be also bounded. and , where the bounds can be calculated from the limits of the actuator. Moreover the limitations help to guarantee comfort and safety requirements.
- Lateral acceleration. During the trajectory planning, the lateral acceleration is minimized. Using the computed data (see Section 3.1), the bounds are set to . Where is set to . More than 95% of the computed maximum accelerations are above this value (Figure 7).

Appendix A.3. Neural Network Based Trajectory Planning
References
- Ziebinski, A.; Cupek, R.; Erdogan, H.; Waechter, S. A Survey of ADAS Technologies for the Future Perspective of Sensor Fusion. In Proceedings of the Computational Collective Intelligence, Halkidiki, Greece, 28–30 September 2016. [Google Scholar]
- Hasenjager, M.; Heckmann, M.; Wersing, H. A Survey of Personalization for Advanced Driver Assistance Systems. IEEE Trans. Intell. Veh. 2019, 5, 335–344. [Google Scholar] [CrossRef]
- Nemeth, B.; Gaspar, P.; Hegedus, T. Optimal Control of Overtaking Maneuver for Intelligent Vehicles. J. Adv. Transp. 2018, 2018. [Google Scholar] [CrossRef]
- Fu, X.; Jiang, Y.; Lu, G.; Wang, J.; Huang, D.; Yao, D. Probabilistic Trajectory Prediction in Intelligent Driving. IFAC Proc. Vol. 2014, 47, 2664–2672. [Google Scholar] [CrossRef]
- Hegedus, T.; Nemeth, B.; Gaspar, P. Graph-based Multi-Vehicle Overtaking Strategy for Autonomous Vehicles. In Proceedings of the 9th IFAC Symposium on Advances in Automotive Control (AAC), Orléans, France, 21–22 June 2019; pp. 372–377. [Google Scholar]
- Yoon, S.; Kum, D. The Multilayer Perceptron Approach to Lateral Motion Prediction of Surrounding Vehicles for Autonomous Vehicles. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Gotenburg, Sweden, 19–22 June 2016; pp. 1307–1312. [Google Scholar]
- Xu, W.; Pan, J.; Wei, J.; Dolan, J.M. Motion Planning under Uncertainty for On-Road Autonomous Driving. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–5 June 2014; pp. 2507–2512. [Google Scholar]
- Tsitsiklis, J.N. Efficient algorithms for globally optimal trajectories. IEEE Trans. Autom. Control. 1995, 40, 1528–1538. [Google Scholar] [CrossRef]
- Nemeth, B.; Hegedus, T.; Gáspár, P. Model Predictive Control Design for Overtaking Maneuvers for Multi-Vehicle Scenarios. In Proceedings of the 2019 18th European Control Conference (ECC), Naples, Italy, 25–28 June 2019; pp. 744–749. [Google Scholar]
- Nemeth, B.; Hegedus, T.; Gaspar, P. Performance Guarantees on Machine-Learning-based Overtaking Strategies for Autonomous Vehicles. In Proceedings of the 2020 European Control Conference (ECC), Saint-Petersburg, Russia, 12–15 May 2020; pp. 136–141. [Google Scholar]
- Hegedus, T.; Nemeth, B.; Gaspar, P. Multi-objective trajectory design for overtaking maneuvers of automated vehicles. In Proceedings of the IFAC World Congress 2020, Berlin, Germany, 12–17 July 2020. [Google Scholar]
- Ji, X.; He, X.; Lv, C.; Liu, Y.; Wu, J. Adaptive-neural-network-based robust lateral motion control for autonomous vehicle at driving limits. Control. Eng. Pract. 2018, 76, 41–53. [Google Scholar] [CrossRef]
- Berntorp, K. Path Planning and Integrated Collision Avoidance for Autonomous Vehicles. In Proceedings of the 2017 American Control Conference, Washington, DC, USA, 24–26 May 2017; pp. 4023–4028. [Google Scholar]
- Berntorp, K.; Magnusson, F. Hierarchical Predictive Control for Ground-Vehicle Maneuvering. In Proceedings of the 2015 American Control Conference, Chicago, IL, USA, 1–3 July 2015; pp. 2771–2776. [Google Scholar]
- Cao, D.; Yang, B. An improved k-medoids clustering algorithm. In Proceedings of the 2nd International Conference on Computer and Automation Engineering (ICCAE), Singapore, 26–28 February 2010; pp. 132–135. [Google Scholar]
- U.S. Department of Transportation. NGSIM—Next Generation Simulation. 2008. Available online: https://ops.fhwa.dot.gov/trafficanalysistools/ngsim.htm (accessed on 15 July 2020).
- Coifman, B.; Li, L. A critical evaluation of the Next Generation Simulation (NGSIM) vehicle trajectory dataset. Transp. Res. Part Methodol. 2017, 105, 362–377. [Google Scholar] [CrossRef]
- Punzo, V.; Borzacchiello, M.T.; Ciuffo, B. On the assessment of vehicle trajectory data accuracy and application to the Next Generation SIMulation (NGSIM) program data. Transp. Res. Part Emerg. Technol. 2011, 19, 1243–1262. [Google Scholar] [CrossRef]
- Gray, A. Modern Differential Geometry of Curves and Surfaces; CRC Press: Boca Raton, FL, USA, 1993. [Google Scholar]
- Mahapatra, G.; Maurya, A.K. Dynamic parameters of vehicles under heterogeneous traffic stream with non-lane discipline: An experimental study. J. Traffic Transp. Eng. 2018, 5, 386–405. [Google Scholar] [CrossRef]
- Asaithambi, G.; Shravani, G. Overtaking behaviour of vehicles on undivided roads in non-lane based mixed traffic conditions. J. Traffic Transp. Eng. 2017, 4, 252–261. [Google Scholar] [CrossRef]
- Xu, J.; Yang, K.; Shao, Y.; Lu, G. An Experimental Study on Lateral Acceleration of Cars in Different Environments in Sichuan, Southwest China. Discret. Dyn. Nat. Soc. 2015, 6, 1–16. [Google Scholar] [CrossRef]
- Matute-Peaspan, J.A.; Marcano, M.; Zubizarreta, A.; Perez, J. Longitudinal Model Predictive Control with comfortable speed planner. In Proceedings of the 2018 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Torres Vedras, Portugal, 25–27 April 2018; pp. 136–141. [Google Scholar]
- Rajamani, R. Vehicle Dynamics and Control; Springer: New York, NY, USA, 2005. [Google Scholar]
- Chen, J.; Zhao, P.; Liang, H.; Mei, T. Motion Planning for Autonomous Vehicle Based on Radial Basis Function Neural Network in Unstructured Environment. Sensors 2014, 14, 17548–17566. [Google Scholar] [CrossRef] [PubMed]
- Demut, H.; Hagan, M.; Beale, M. Neural Network Design; PWS Publishing Co: Boston, MA, USA, 1997. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| Error (from NN) (m) | 0.312 | 0.258 | 0.161 | 0.435 | 0.419 |
Sample Availability: Samples of the compounds are available from the authors. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hegedűs, T.; Németh, B.; Gáspár, P. Design of a Low-complexity Graph-Based Motion-Planning Algorithm for Autonomous Vehicles. Appl. Sci. 2020, 10, 7716. https://doi.org/10.3390/app10217716
Hegedűs T, Németh B, Gáspár P. Design of a Low-complexity Graph-Based Motion-Planning Algorithm for Autonomous Vehicles. Applied Sciences. 2020; 10(21):7716. https://doi.org/10.3390/app10217716
Chicago/Turabian StyleHegedűs, Tamás, Balázs Németh, and Péter Gáspár. 2020. "Design of a Low-complexity Graph-Based Motion-Planning Algorithm for Autonomous Vehicles" Applied Sciences 10, no. 21: 7716. https://doi.org/10.3390/app10217716
APA StyleHegedűs, T., Németh, B., & Gáspár, P. (2020). Design of a Low-complexity Graph-Based Motion-Planning Algorithm for Autonomous Vehicles. Applied Sciences, 10(21), 7716. https://doi.org/10.3390/app10217716