Research on Passive Ranging Technology of Moving Ship Based on Vertical Hydrophone Array



Abstract
1. Introduction
2. Basic Theory
2.1. DEMON Spectrum Analysis for A Single Hydrophone
2.2. Range Estimation by Sound Intensity of The Pressure Difference
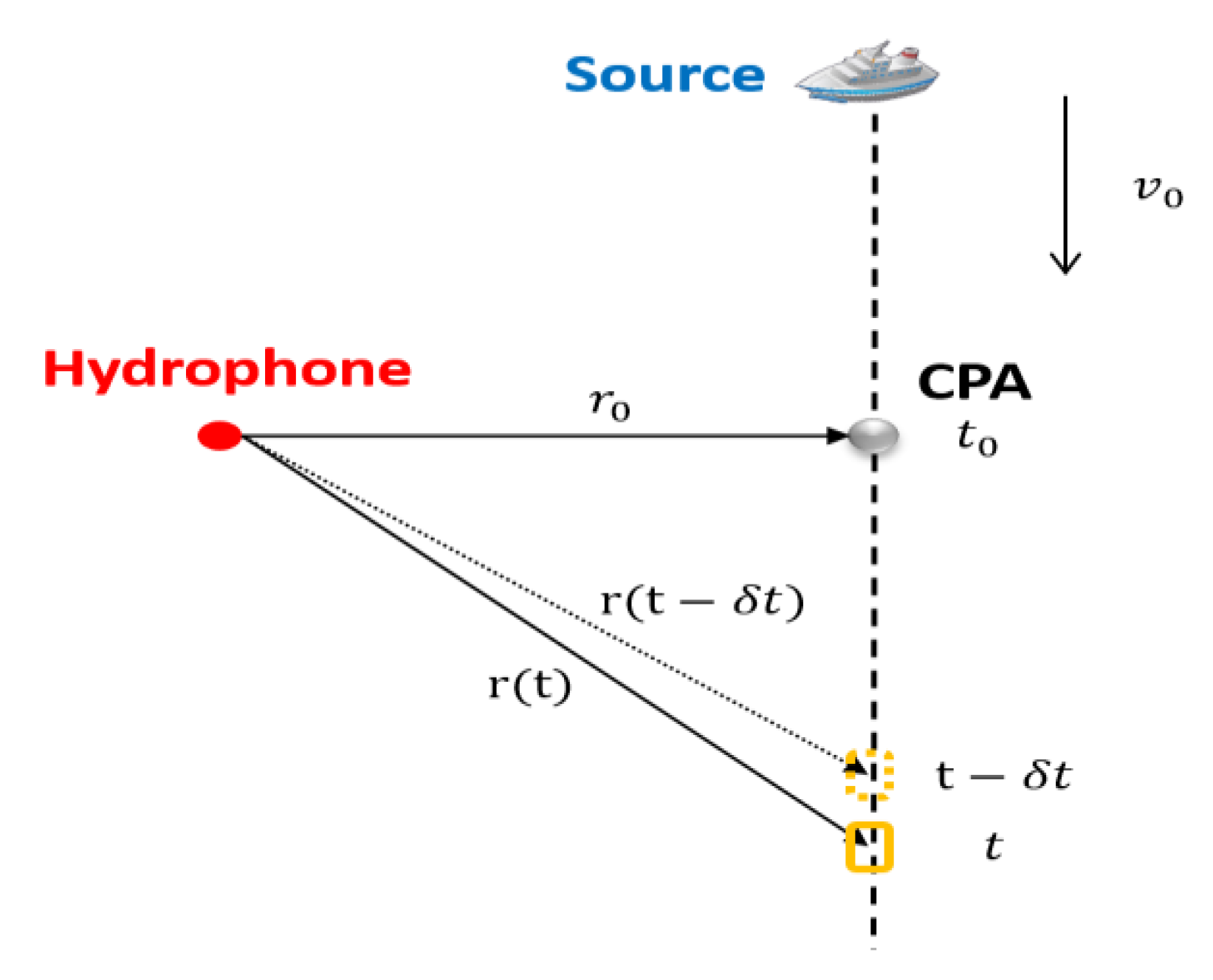
2.2.1. Radial Velocity Derivation
2.2.2. Range Estimation
2.3. Data Fusion Technology Based on Weighted Least Squares
3. Simulation
4. Experimental Analysis
4.1. Experiment Situation
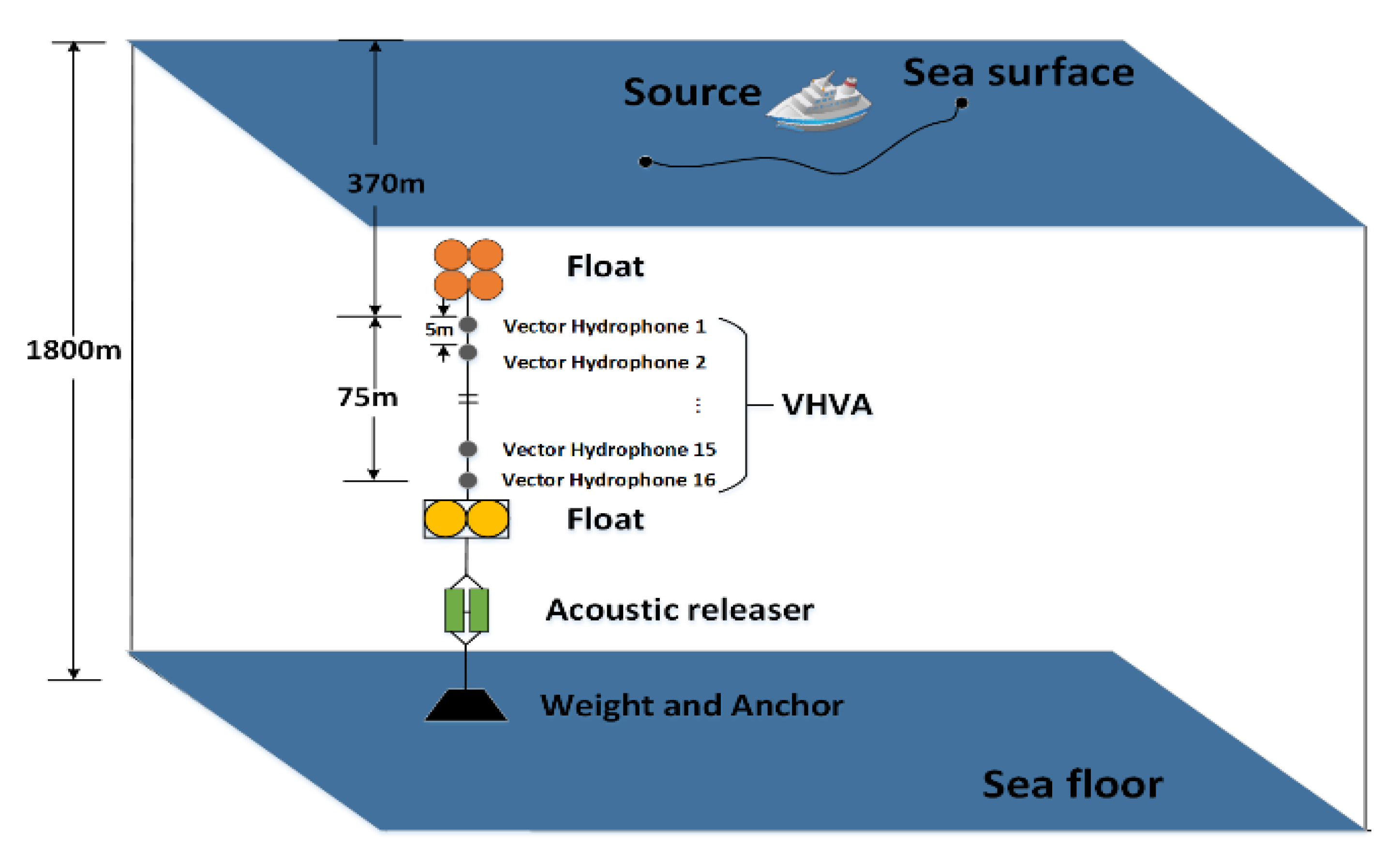
- The vertical hydrophone line array was composed of 16 elements with an interval of 5 m. The depth of the top hydrophone was 370 m, and that of the bottom sensor was about 445 m. The depth of water over the experimental area was about 1800 m.
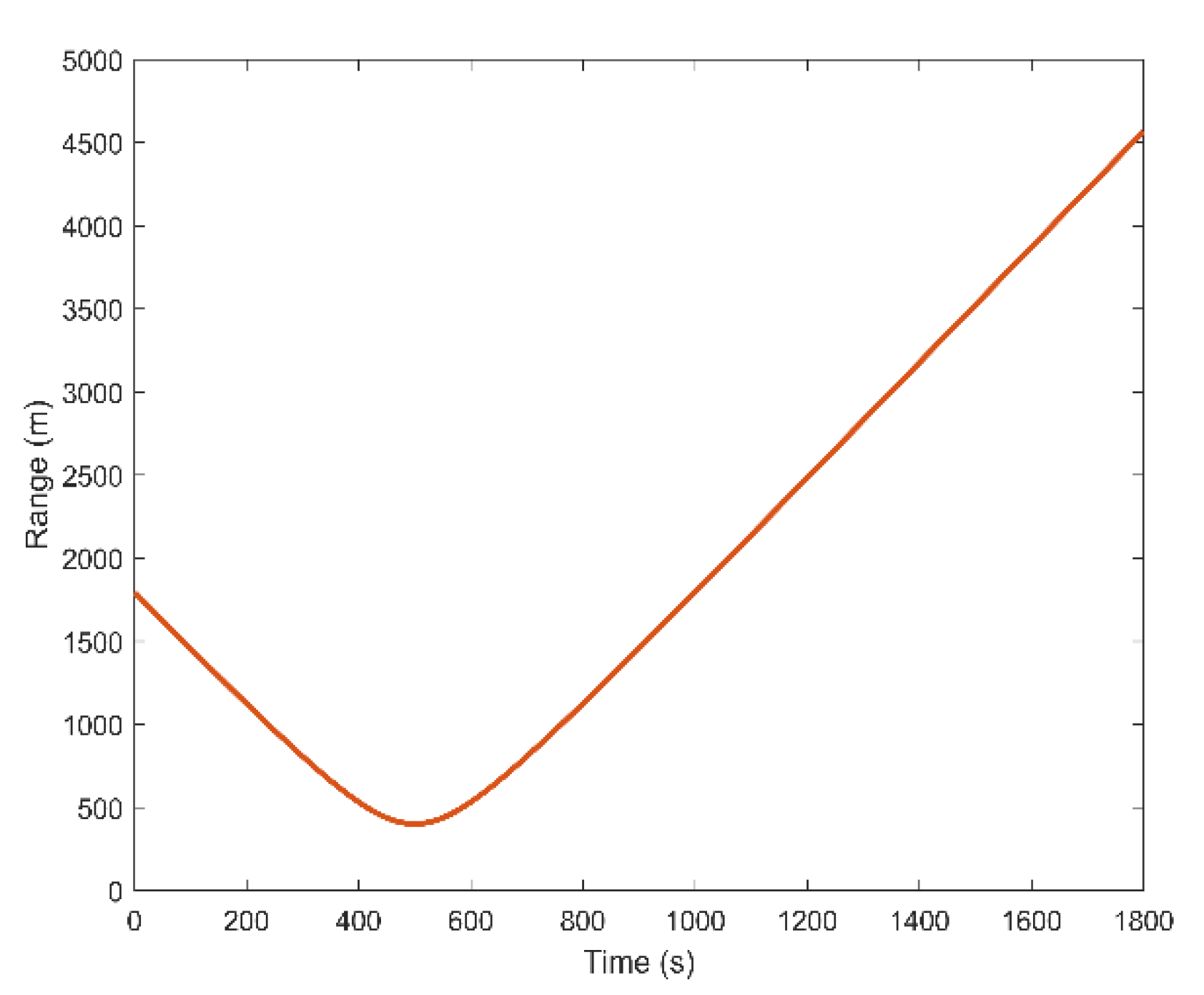
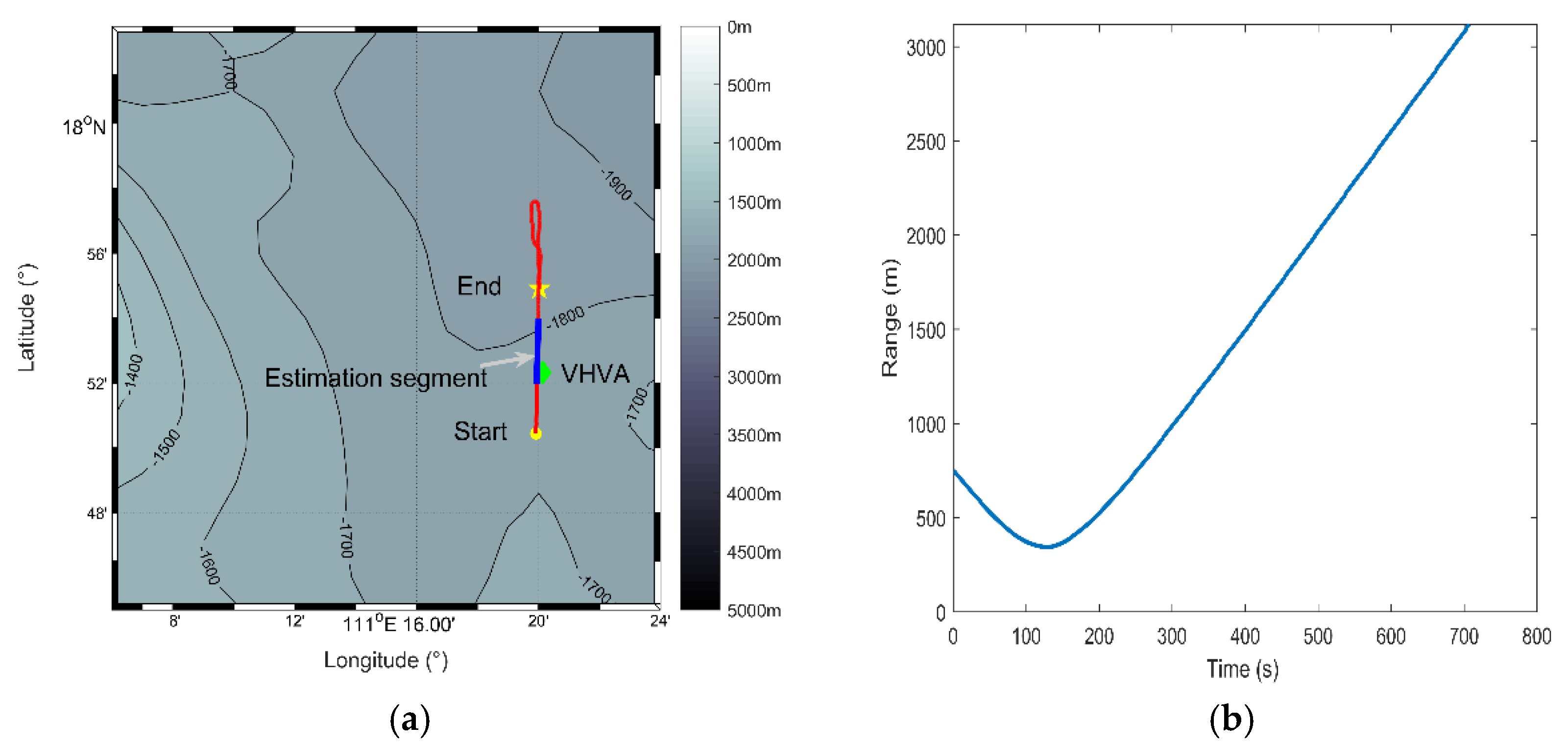
- The position where the heavy block attached below the array finally entered the water was regarded as the real array position recorded by the Global Positioning System (GPS) during the experiment. The moving vessel had GPS modules to record its real-time spatial positions. The corresponding trajectory map has been shown in Figure 10a. The real range from the ship to the array was calculated by GPS data and was then shown in Figure 10b. From this figure, we can see that the range and time of the CPA point were 344 m and 130 s, respectively. The moving velocity of the ship was about 5 m/s.
- The array may have a small tilt due to the disturbance of ocean currents. However, this small angular offset has little effect (only within 10%) on the final ranging result.
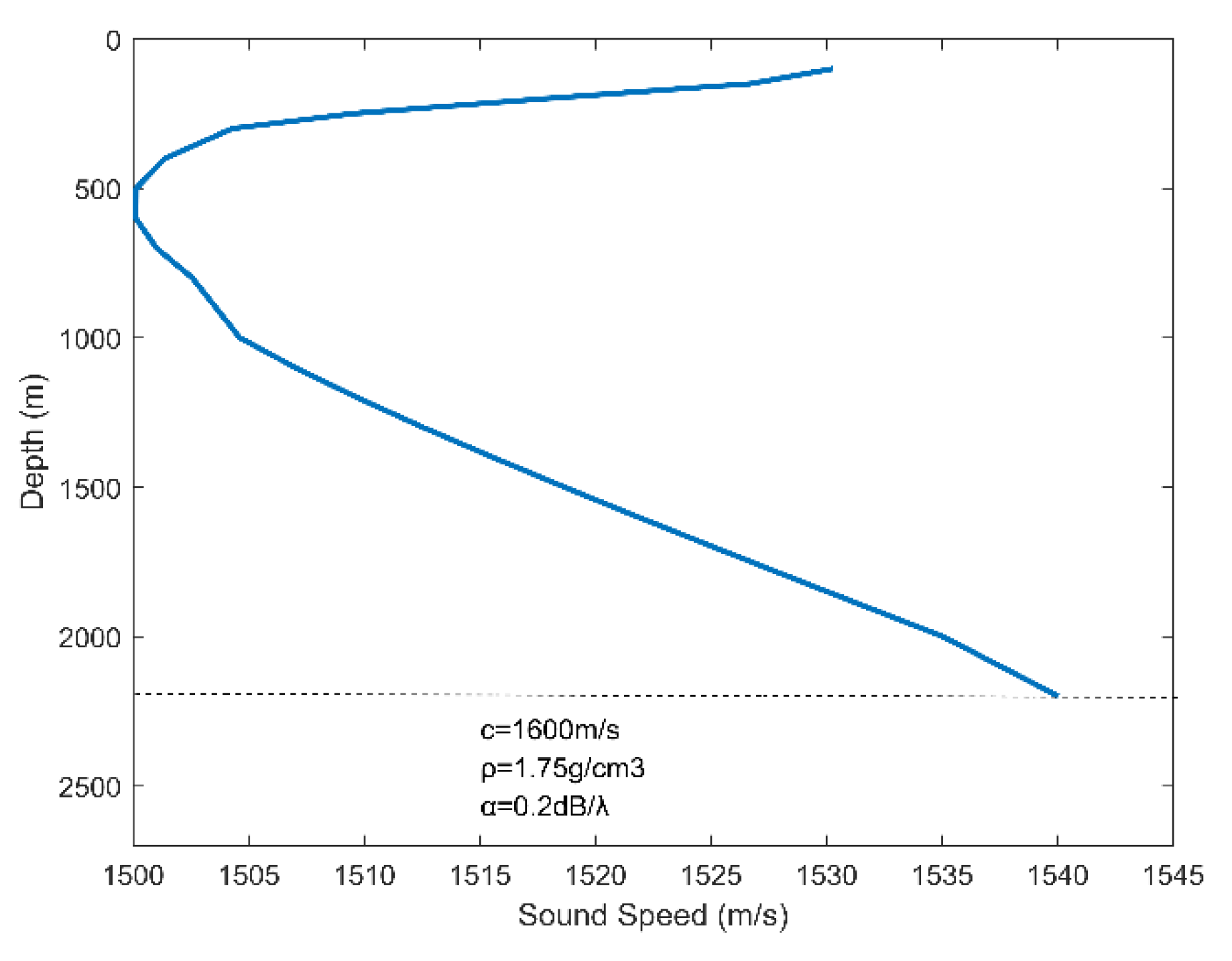
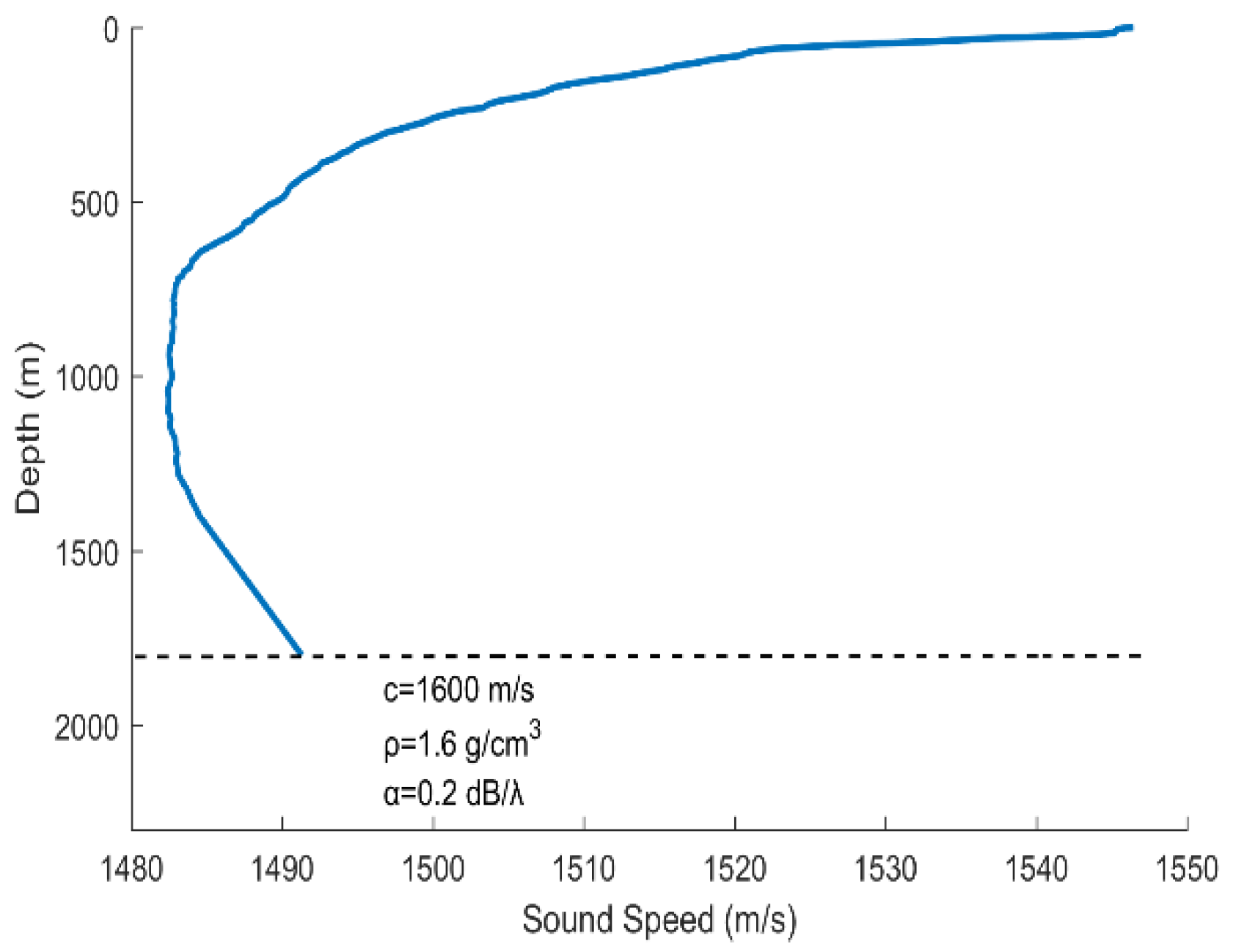
- The sound velocity profiler (SVP) was used to measure the sound speed profile (SSP) at the beginning of the experiments. The measured SSP is shown in Figure 11.
- The sampling rate was 16 kHz. The sea condition was level 3, and no other vessels passed during the measurement time.
4.2. Results Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Mei, J.D.; Hui, J.Y.; Hui, J. Research on simulation of near field passive ranging with underwater acoustic image by focused beam-forming. J. Syst. Simul. 2008, 20, 1328–1333. [Google Scholar]
- Peng, C.; Jiang, K.Y. Research on passive ranging of three-element correlation. Tech. Acoust. 2012, 31, 431–435. [Google Scholar]
- Baggeroer, A.B.; Kuperman, W.A. Matched field processing: Source localization in correlated noise as an optimum parameter estimation problem. J. Acoust. Soc. Am. 1988, 83, 571–587. [Google Scholar] [CrossRef]
- Tollefsen, D.; Dosso, S.E. Matched-field source localization with multiple small-aperture arrays. J. Acoust. Soc. Am. 2015, 138, 1754. [Google Scholar] [CrossRef]
- Tollefsen, D.; Dosso, S.E. Source localization with multiple hydrophone arrays via matched-field processing. IEEE J. Ocean. Eng. 2016, 42, 654–662. [Google Scholar] [CrossRef]
- Cockrell, K.L.; Schmidt, H. Robust passive range estimation using the waveguide invariant. J. Acoust. Soc. Am. 2010, 127, 2780. [Google Scholar] [CrossRef] [PubMed]
- Rakotonarivo, S.T.; Kuperman, W.A. Model-independent range localization of a moving source in shallow water. J. Acoust. Soc. Am. 2012, 132, 2218. [Google Scholar] [CrossRef] [PubMed]
- Rémi, E.; Julien, B.; Marie, G.; Xavier, C.; Thierry, C. Understanding deep-water striation patterns and predicting the waveguide invariant as a distribution depending on range and depth. J. Acoust. Soc. Am. 2018, 143, 3444–3454. [Google Scholar]
- Young, A.H.; Harms, H.A.; Hickman, G.W.; Rogers, J.S.; Krolik, J.L. Waveguide-invariant-based ranging and receiver localization using tonal sources of opportunity. IEEE J. Ocean. Eng. 2019, 45, 631–644. [Google Scholar] [CrossRef]
- Li, J.; Sun, G.Q.; Han, Q.B.; Zhang, C.H. Acoustics Vector Sensor Linear Array Passive Ranging Based on Waveguide Invariant. J. Acoust. Soc. Am. 2012, 1495, 576–586. [Google Scholar]
- Cho, C.; Song, H.C.; Hodgkiss, W.S. Robust source-range estimation using the array/waveguide invariant and a vertical array. J. Acoust. Soc. Am. 2016, 139, 63–69. [Google Scholar] [CrossRef] [PubMed]
- Cheng, Y.S.; Wang, Y.C.; Shi, G.Z.; Hui, J.Y. DEMON analysis of underwater target radiation noise based on modern signal processing. Tech. Acoust. 2006, 25, 71. [Google Scholar]
- Chung, K.W.; Sutin, A.; Sedunov, A.; Bruno, M. DEMON acoustic ship signature measurements in an urban harbor. Adv. Acoust. Vib. 2011, 2011. [Google Scholar] [CrossRef]
- Yao, Z.X.; Hui, J.Y.; Wang, D.J.; Cai, P. Identifying two targets by a single vector hydrophone based on the DEMON spectrum. Appl. Acoust. 2005, 3, 171–176. [Google Scholar]
- Klein, L.A. Sensor and Data Fusion Concepts and Applications; Society of Photo-Optical Instrumentation Engineers (SPIE) Press: Bellingham, WA, USA, 1999. [Google Scholar]
- Li, X.; Ma, X. Underwater data fusion of multiple arrays in a mono-platform for low SNR. In Proceedings of the 2017 IEEE International Conference on Signal Processing, Xiamen, China, 22–25 October 2017; pp. 1–4. [Google Scholar]
- Dos Santos, M.M.; De Giacomo, G.G.; Drews, P.L.J.; Botelho, S.S.C. Underwater sonar and aerial images data fusion for robot localization. In Proceedings of the 2019 19th International Conference on Advanced Robotics (ICAR), Belo Horizonte, Brazil, 2–6 December 2019; pp. 578–583. [Google Scholar]
- Yan, J.; Xu, Z.Q.; Luo, X.Y.; Chen, C.L.; Guan, X.P. Feedback-based target localization in underwater sensor networks: A multi-sensor fusion approach. IEEE Trans. Signal Inf. Process. Over Netw. 2018, 5, 1. [Google Scholar] [CrossRef]
- Prasanna, K.L.; Rao, S.K.; Jagan, B.O.L.; Jawahar, A.; Karishma, S.B. Data fusion in underwater environment. Int. J. Eng. Technol. 2016, 8, 225–234. [Google Scholar]
- Jensen, F.B.; Kuperman, W.A.; Porter, M.B.; Schmidt, H. Computational Ocean. Acoustics; Springer: New York, NY, USA, 2011; pp. 338–340. [Google Scholar]
- Liang, Y.; Meng, Z.; Chen, Y.; Zhang, Y.; Wang, M.; Zhou, X. A data fusion orientation algorithm based on the weighted histogram statistics for vector hydrophone vertical array. Sensors 2020, 20, 5619. [Google Scholar] [CrossRef] [PubMed]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element Number | #1 | #2 | #3 | #4 | #5 | #6 | #7 | #8 | #9 |
| RMSE | 0.0431 | 0.0208 | 0.0188 | 0.0212 | 0.0199 | 0.0225 | 0.1070 | 0.0393 | 0.0150 |
| Element Number | #10 | #11 | #12 | #13 | #14 | #15 | #16 | DF | |
| RMSE | 0.1209 | 0.0012 | 8.4 × 10 −4 | 1.8572 | 0.0553 | 1.2 × 10 −5 | 1.7 × 10 −4 | 4.9 × 10 −4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, Y.; Meng, Z.; Chen, Y.; Zhang, Y.; Zhou, X.; Wang, M. Research on Passive Ranging Technology of Moving Ship Based on Vertical Hydrophone Array. Appl. Sci. 2020, 10, 7396. https://doi.org/10.3390/app10217396
Liang Y, Meng Z, Chen Y, Zhang Y, Zhou X, Wang M. Research on Passive Ranging Technology of Moving Ship Based on Vertical Hydrophone Array. Applied Sciences. 2020; 10(21):7396. https://doi.org/10.3390/app10217396
Chicago/Turabian StyleLiang, Yan, Zhou Meng, Yu Chen, Yichi Zhang, Xin Zhou, and Mingyang Wang. 2020. "Research on Passive Ranging Technology of Moving Ship Based on Vertical Hydrophone Array" Applied Sciences 10, no. 21: 7396. https://doi.org/10.3390/app10217396
APA StyleLiang, Y., Meng, Z., Chen, Y., Zhang, Y., Zhou, X., & Wang, M. (2020). Research on Passive Ranging Technology of Moving Ship Based on Vertical Hydrophone Array. Applied Sciences, 10(21), 7396. https://doi.org/10.3390/app10217396