Effects of Bionic Curves on Penetration Force under Difference Soils


Abstract
Featured Application
Abstract

1. Introduction
2. Materials and Methods
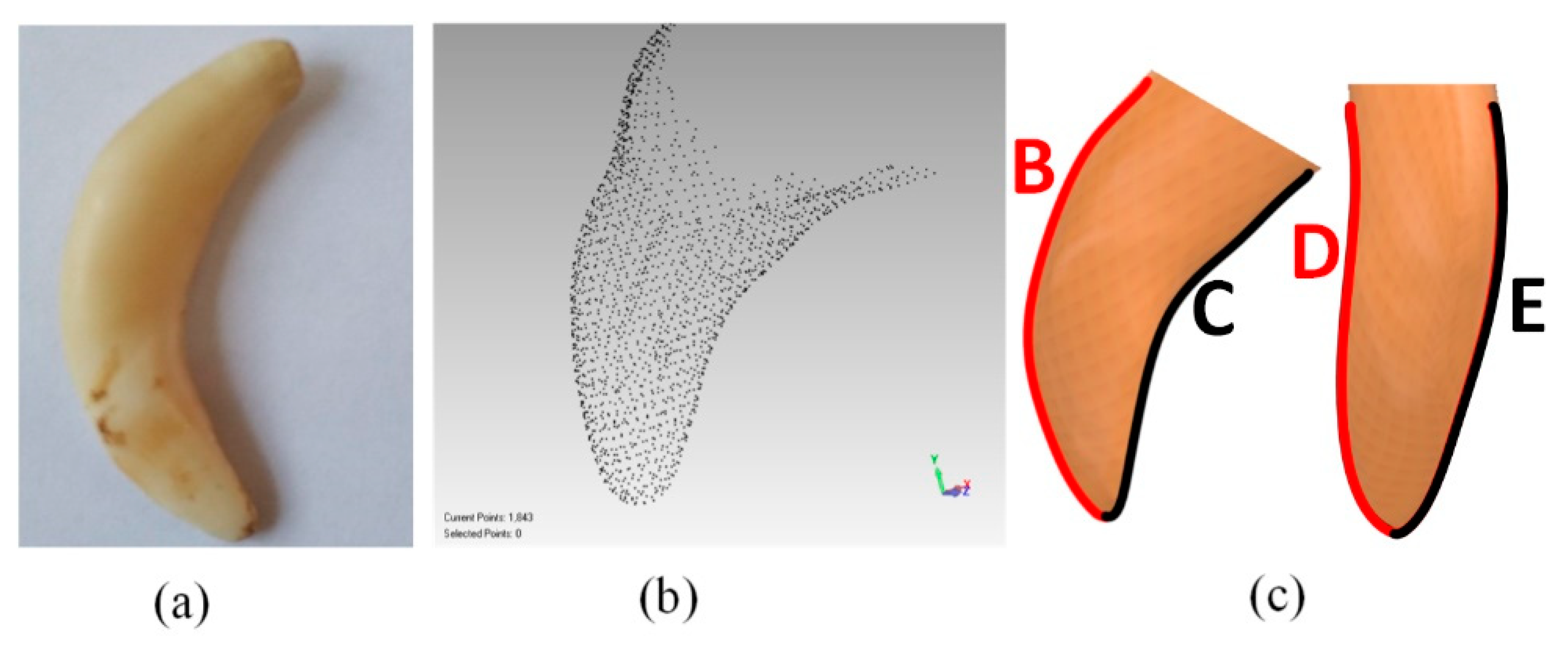
2.1. 3D Model Acquisition
2.2. Specimens Design and Fabrication
2.3. Design and Preparation of Penetration Tests
2.4. Finite Element Modeling
3. Results
3.1. Penetration Force
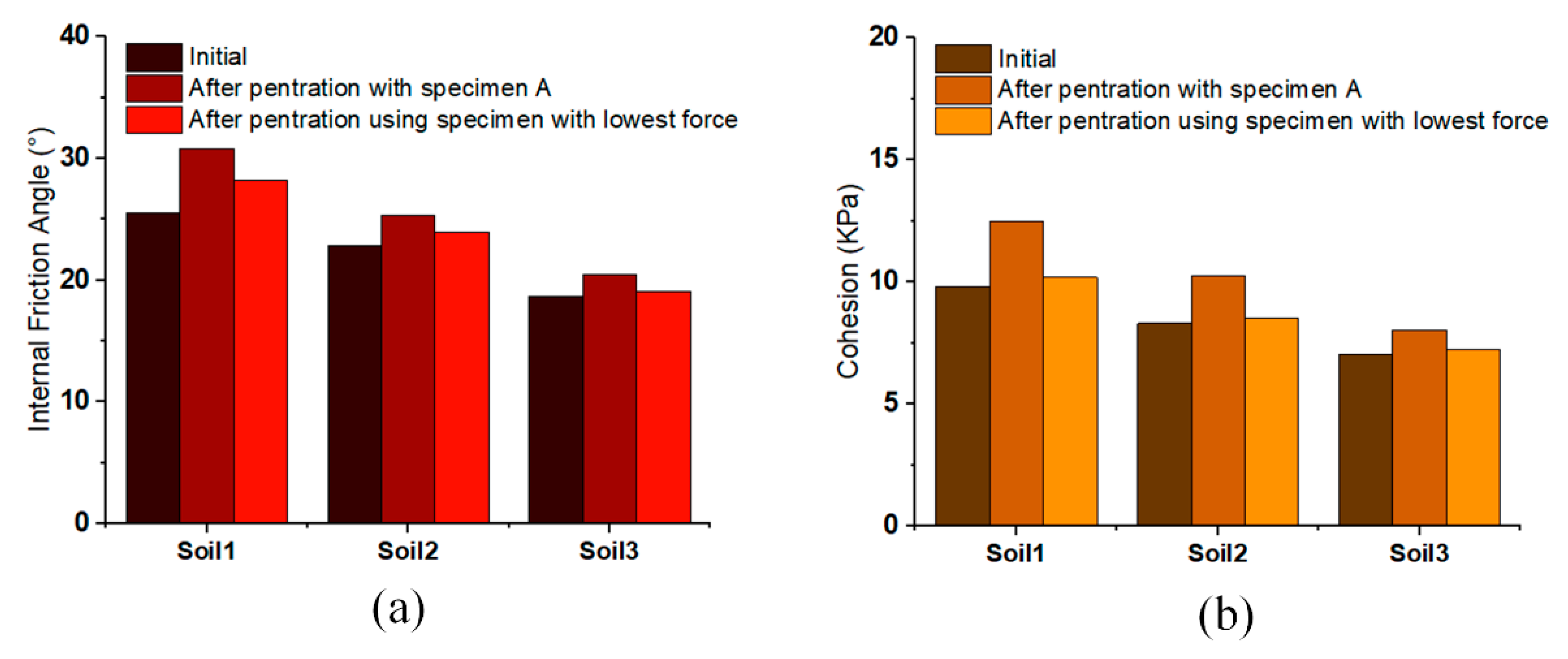
3.2. Soil Properties before and after Penetration
3.3. Soil Surface Status after Penetration
4. Conclusions
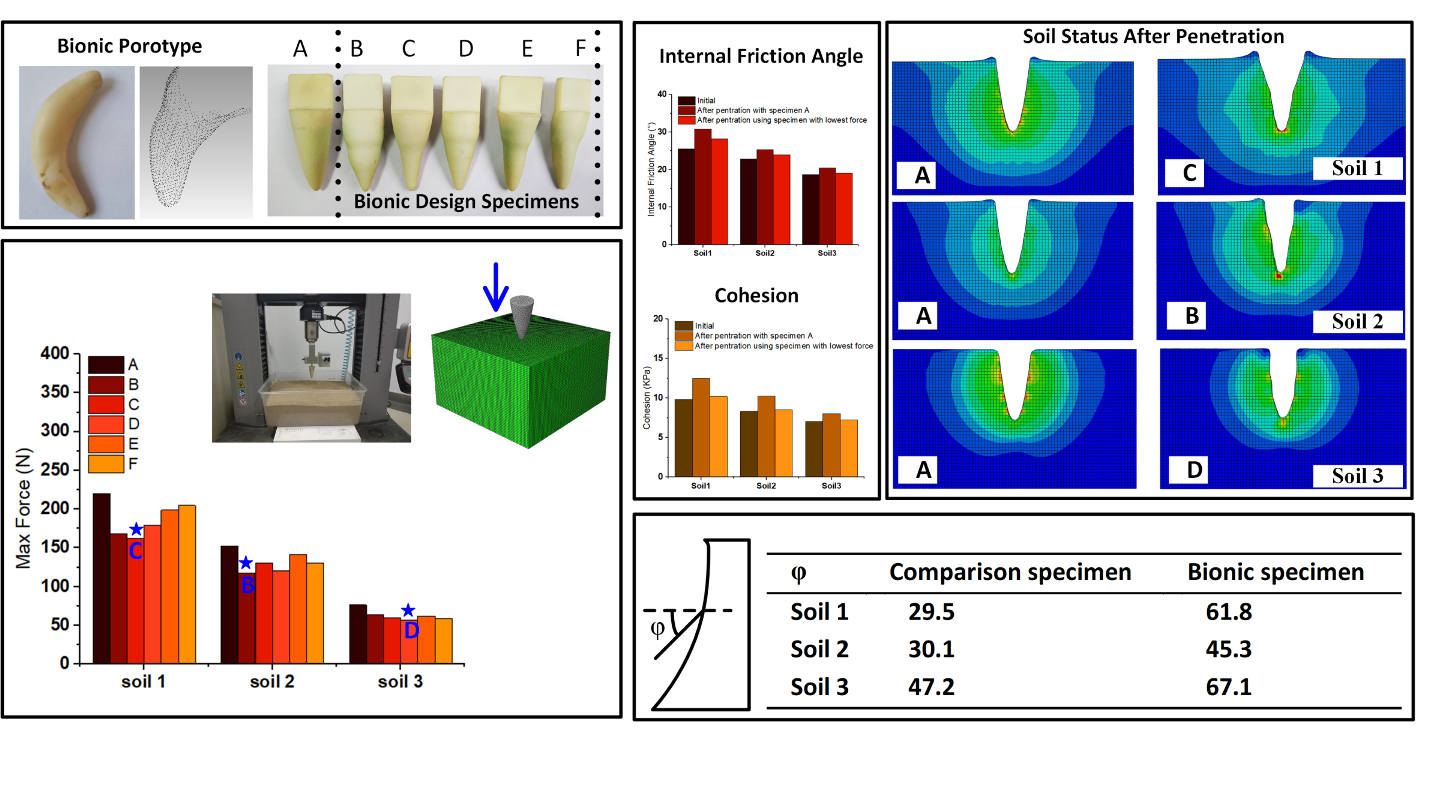
- Geometry of cone affects the penetration force substantially. Experimental results showed that the bionic specimens C, B, and D obtained the lowest penetration force in soils 1, 2, and 3, respectively.
- The lower penetration force resulted from bionic specimens (specimens C, B, and D) should be attributed to the fact that their soil strength after penetration was lower than that by using specimen A.
- The simulation results showed that the force direction was changed using bionic specimen, resulting in a higher proportion of vertical force, a lower proportion of horizontal force, and a better flowability, which is also part of the reason for the lower penetration force.
Author Contributions
Funding
Conflicts of Interest
References
- Bentaher, H.; Ibrahmi, A.; Hamza, E.; Hbaieb, M.; Kantchev, G.; Maalej, A.; Arnold, W. Finite element simulation of moldboard-soil interaction. Soil Tillage Res. 2013, 134, 11–16. [Google Scholar] [CrossRef]
- Ani, O.A.; Uzoejinwa, B.B.; Ezeama, A.O.; Onwualu, A.P.; Ugwu, S.N.; Ohagwu, C.J. Overview of soil-machine interaction studies in soil bins. Soil Tillage Res. 2018, 175, 13–27. [Google Scholar] [CrossRef]
- Bianchini, A.; Magalhaes, P.S.G. Evaluation of coulters for cutting sugar cane residue in a soil bin. Biosyst. Eng. 2008, 100, 370–375. [Google Scholar] [CrossRef]
- Sahu, R.K.; Raheman, H. Draught Prediction of Agricultural Implements using Reference Tillage Tools in Sandy Clay Loam Soil. Biosyst. Eng. 2006, 94, 275–284. [Google Scholar] [CrossRef]
- Kushwaha, R.L.; Vaishnav, A.S.; Zoerb, G.C. Soil Bin Evaluation of Disc Coulters Under No-Till Crop Residue Conditions. Trans. ASAE 2013, 29, 0040–0044. [Google Scholar] [CrossRef]
- Abo Al-Kheer, A.; El-Hami, A.; Kharmanda, M.G.; Mouazen, A.M. Reliability-based design for soil tillage machines. J. Terramech. 2011, 48, 57–64. [Google Scholar] [CrossRef]
- Meng, Y.; Wang, M.; Tang, M.; Hong, G.; Gao, J.; Chen, Y. Preparation of robust superhydrophobic halloysite clay nanotubes via mussel-inspired surface modification. Appl. Sci. 2017, 7, 1129. [Google Scholar] [CrossRef]
- Wang, Y.; Li, J.; Li, X.; Huang, H.; Qiu, F. Bionic walking foot and mechanical performance on soil. Appl. Sci. 2017, 7, 575. [Google Scholar] [CrossRef]
- Guo, H.; Liang, X.; Yu, Z.; Xu, T.; Zhang, T.; Liu, H.; Ma, L. Heat transfer designed for bionic surfaces with rib turbulators inspired by alopias branchial arch in a simplified gas turbine transition piece. Appl. Sci. 2018, 8, 820. [Google Scholar] [CrossRef]
- Ball, P. Engineering Shark skin and other solutions. Nature 1999, 400, 507–509. [Google Scholar] [CrossRef]
- Ji, W.; Chen, D.; Jia, H.; Tong, J. Experimental investigation into soil-cutting performance of the claws of mole rat (Scaptochirus moschatus). J. Bionic Eng. 2010, 7, S166–S171. [Google Scholar] [CrossRef]
- Li, B.; Chen, Y.; Chen, J. Modeling of soil-claw interaction using the discrete element method (DEM). Soil Tillage Res. 2016, 158, 177–185. [Google Scholar] [CrossRef]
- Kubo, M.O.; Yamada, E. The inter-relationship between dietary and environmental properties and tooth wear: Comparisons of mesowear, molar wear rate, and hypsodonty index of extant sika deer populations. PLoS ONE 2014, 9, e90745. [Google Scholar] [CrossRef] [PubMed]
- Ma, Y.; Wang, H.; Jia, H.; Wang, H.; Xiao, Y.; Yu, J.; Qi, H.; Chen, C. Mechanical properties, microstructure and morphological properties of badger teeth. Bioinspired Biomim. Nanobiomater. 2018, 7, 131–140. [Google Scholar] [CrossRef]
- Jin, Y.; Sun, H. The Badgers; Northeast Forestry University Press: Haerbin, China, 2011; ISBN 9787811317503. [Google Scholar]
- Hillson, S. Teeth; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Buesching, C.; Johnson, P.J.; Stewart, P.D.; Macdonald, D.W.; Porkert, J. No Evidence of Social Hierarchy amongst Feeding Badgers, Meles meles. Ethology 2003, 108, 613–628. [Google Scholar]
- Roper, T.J. The European badger Meles meles: Food specialist or generalist? J. Zool. 1994, 234, 437–452. [Google Scholar] [CrossRef]
- Hillson, S. Recording dental caries in archaeological human remains. Int. J. Osteoarchaeol. 2001, 11, 249–289. [Google Scholar] [CrossRef]
- Treuting, P.M.; Morton, T.H., Jr.; Vogel, P. Oral Cavity and Teeth BT—Comparative Anatomy and Histology; Academic Press: San Diego, CA, USA, 2018; ISBN 978-0-12-802900-8. [Google Scholar]
- ASAE Standard 4E.S313.2: Soil Penetrometer; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 1999.
- Elijah, D.L.; Weber, J.A. Soil failure and pressure patterns tor flat cutting blades. Trans. ASAE 1971, 14, 781–785. [Google Scholar]
- Godwin, R.J.; Spoor, G. Soil failure with narrow tines. J. Agric. Eng. Res. 1977, 22, 213–228. [Google Scholar] [CrossRef]
- Stafford, J.V. An application of critical state soil mechanics: The performance of rigid tines. J. Agric. Eng. Res. 1981, 26, 387–401. [Google Scholar] [CrossRef]
- Makanga, J.T.; Salokhe, V.M.; Gee-Clough, D. Effect of tine rake angle and aspect ratio on soil failure patterns in dry loam soil. J. Terramech. 1996, 33, 233–252. [Google Scholar] [CrossRef]
- Khanzode, R.M.; Vanapalli, S.K.; Fredlund, D.G. Measurement of soil-water characteristic curves for fine-grained soils using a small-scale centrifuge. Can. Geotech. J. 2002, 39, 1209–1217. [Google Scholar] [CrossRef]
- Mouazen, A.M.; Nemenyi, M. Tillage tool design by the finite element method: Part 1. finite element modelling of soil plastic behaviour. J. Agric. Eng. Res. 1999, 72, 37–51. [Google Scholar] [CrossRef]
- Drucker, D.C.; Prager, W. Soil mechanics and plastic analysis or limit design. Q. Appl. Math. 1952, 10, 157–165. [Google Scholar] [CrossRef]
- Naderi-Boldaji, M.; Alimardani, R.; Hemmat, A.; Sharifi, A.; Keyhani, A.; Tekeste, M.Z.; Keller, T. 3D finite element simulation of a single-tip horizontal penetrometer-soil interaction. Part I: Development of the model and evaluation of the model parameters. Soil Tillage Res. 2013, 134, 153–162. [Google Scholar] [CrossRef]
- Eggers, C.G.; Berli, M.; Accorsi, M.L.; Or, D. Deformation and permeability of aggregated soft earth materials. J. Geophys. Res. Solid Earth 2006, 111. [Google Scholar] [CrossRef]
- Manual, H.C. Transportation Research Board of the National Academies; Federal Highway Administration: Washington, DC, USA, 2010.
- Liyanapathirana, D.S. Arbitrary Lagrangian Eulerian based finite element analysis of cone penetration in soft clay. Comput. Geotech. 2009, 36, 851–860. [Google Scholar] [CrossRef]
- Gill, W.R.; Berg, G.E.V. Soil Dynamics in Tillage and Traction; Agricultural Research Service, US Department of Agriculture: Washington, DC, USA, 1967; ISBN 0065-4612.
- Moayedi, H.; Bui, D.T.; Dounis, A.; Foong, L.K.; Kalantar, B. Novel nature-inspired hybrids of neural computing for estimating soil shear strength. Appl. Sci. 2019, 9, 4643. [Google Scholar] [CrossRef]
- Komandi, G. On the mechanical properties of soil as they affect traction. J. Terramech. 1992, 29, 373–380. [Google Scholar] [CrossRef]
- Gitau, A.N.; Gumbe, L.O.; Biamah, E.K. Influence of soil water on stress–strain behaviour of a compacting soil in semi-arid Kenya. Soil Tillage Res. 2006, 89, 144–154. [Google Scholar] [CrossRef]
- Munsnori, H.; Akihiko, U. Empirical correlation between penetration resistance and internal friction angle of sandy soils. Soils Found. 1996, 36, 1–9. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Soil 1 | Soil 2 | Soil 3 | |
|---|---|---|---|
| Sand (%) | 72.53 | 25.85 | 25.85 |
| Clay (%) | 20.68 | 53.99 | 53.99 |
| Silt (%) | 6.79 | 20.16 | 20.16 |
| Soil 1 | Soil 2 | Soil 3 | |
|---|---|---|---|
| Bulk density (g/cm3) | 1.98 | 1.53 | 1.22 |
| Moisture (%) | 0 | 0 | 25 |
| Cohesion (Kpa) | 9.8 | 13.5 | 10.2 |
| Internal friction angle (°) | 30.8 | 28.2 | 25.5 |
| Properties | Soil 1 | Soil 2 | Soil 3 |
|---|---|---|---|
| Density (mg/m3) | 1.98 | 1.53 | 1.22 |
| E, Elastic modulus (Mpa) | 4.3 | 2.25 | 1.25 |
| ν, Poisson’s ratio | 0.47 | 0.43 | 0.43 |
| K, Flow stress ratio | 0.93 | 0.89 | 0.85 |
| β, Internal friction angle (°) | 30.8 | 28.2 | 25.5 |
| ψ, Dilatancy angle (°) | 0.1 | 0 | 0 |
| C, Cohesion (Kpa) | 9.8 | 13.5 | 10.2 |
| f, coefficient of friction | 0.6 | 0.45 | 0.3 |
| Specimen A | Specimen C in Soil 1, Specimen B in Soil 2 and Specimen D in Soil 3 | |
|---|---|---|
| Soil 1 | 29.5 | 61.8 |
| Soil 2 | 30.1 | 45.3 |
| Soil 3 | 47.2 | 67.1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Y.; Wang, H.; Zhuang, J.; Qi, H.; Yu, J. Effects of Bionic Curves on Penetration Force under Difference Soils. Appl. Sci. 2020, 10, 529. https://doi.org/10.3390/app10020529
Ma Y, Wang H, Zhuang J, Qi H, Yu J. Effects of Bionic Curves on Penetration Force under Difference Soils. Applied Sciences. 2020; 10(2):529. https://doi.org/10.3390/app10020529
Chicago/Turabian StyleMa, Yunhai, Huixin Wang, Jian Zhuang, Hongyan Qi, and Jiangtao Yu. 2020. "Effects of Bionic Curves on Penetration Force under Difference Soils" Applied Sciences 10, no. 2: 529. https://doi.org/10.3390/app10020529
APA StyleMa, Y., Wang, H., Zhuang, J., Qi, H., & Yu, J. (2020). Effects of Bionic Curves on Penetration Force under Difference Soils. Applied Sciences, 10(2), 529. https://doi.org/10.3390/app10020529