Arching Detection Method of Slab Track in High-Speed Railway Based on Track Geometry Data


Abstract
Featured Application
Abstract
1. Introduction
2. Data Description and Preprocessing
2.1. Data Source
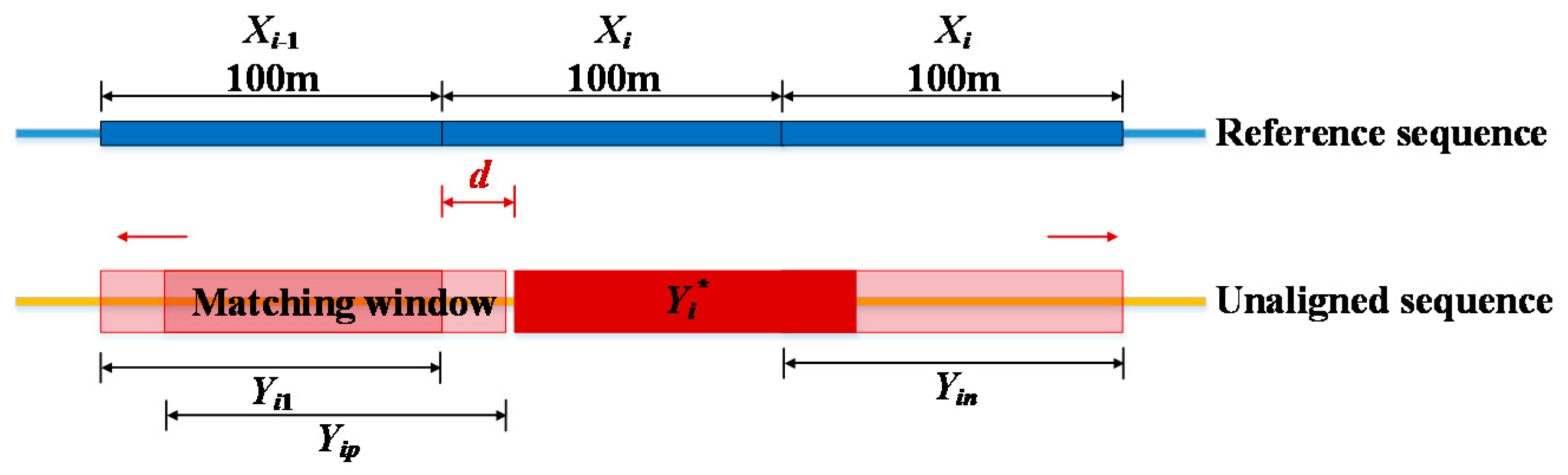
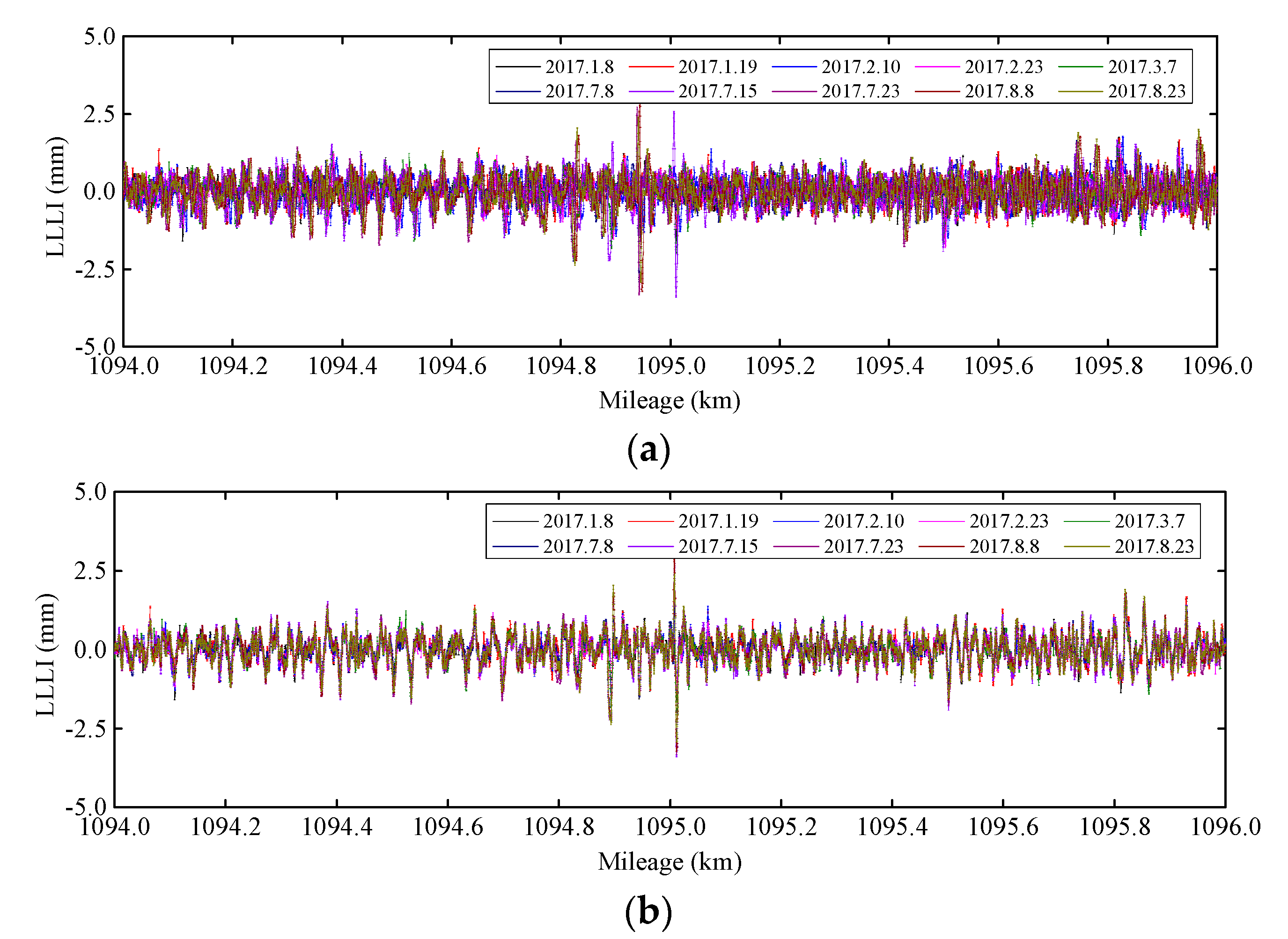
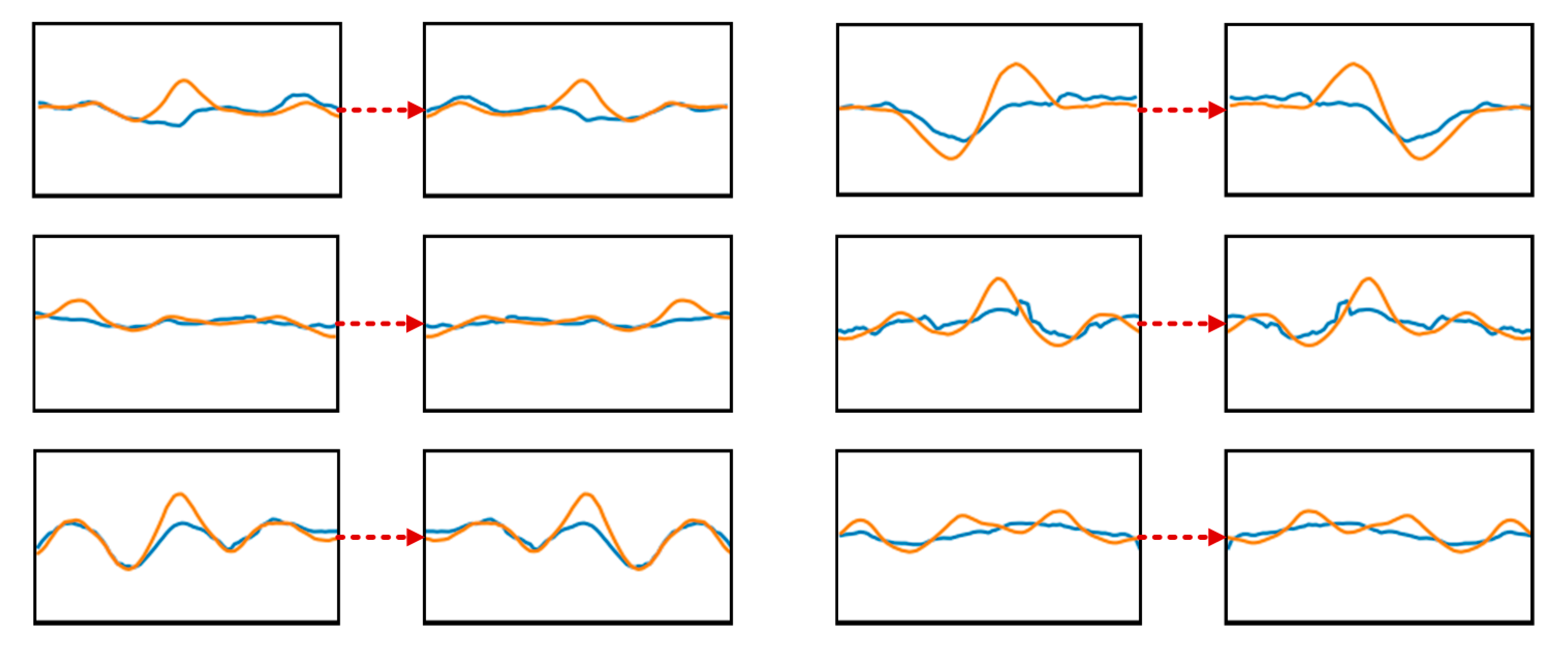
2.2. Data Mile-Point Alignment
2.3. Arching Characteristics
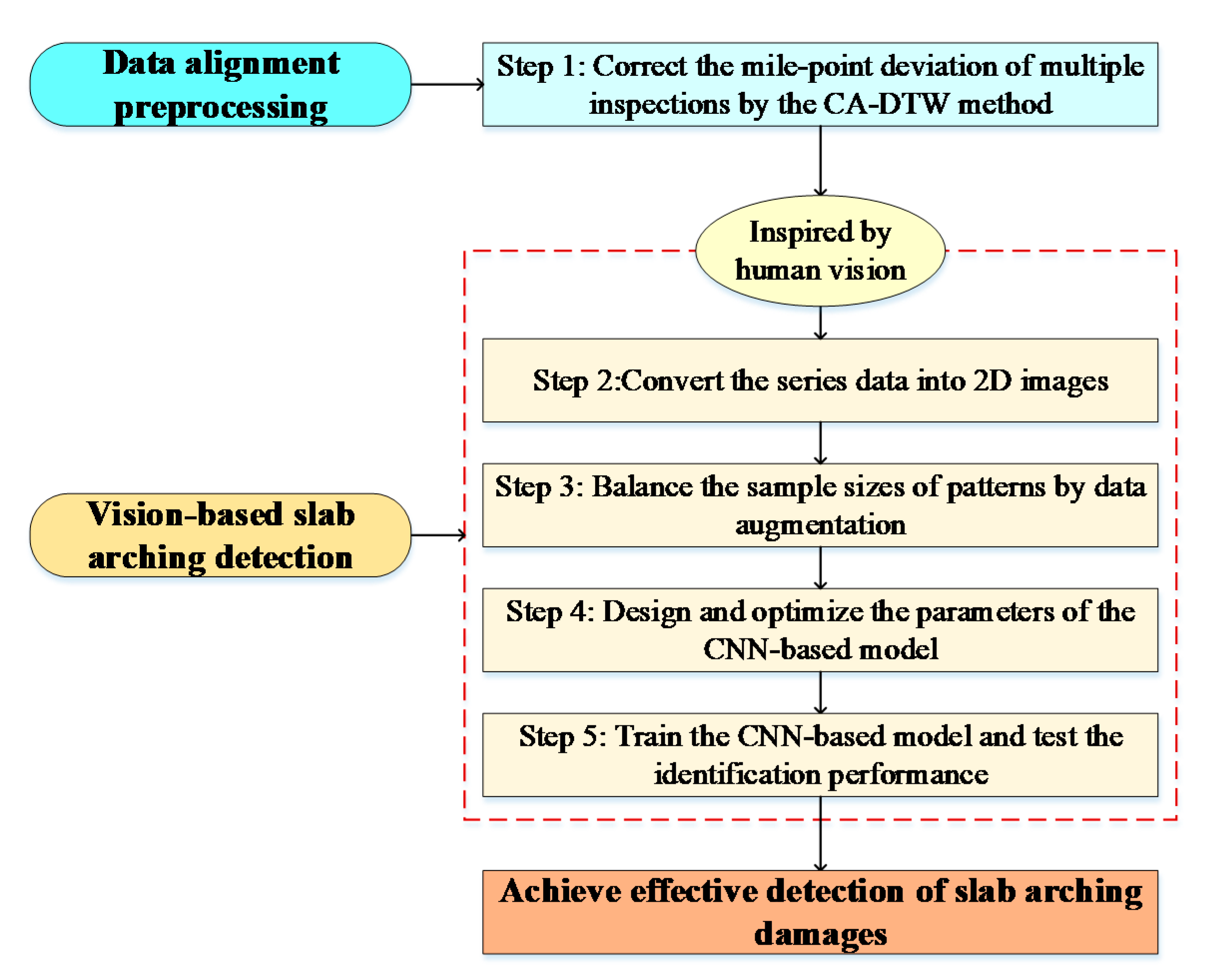
3. Proposed Vision-Based Arching Detection Method
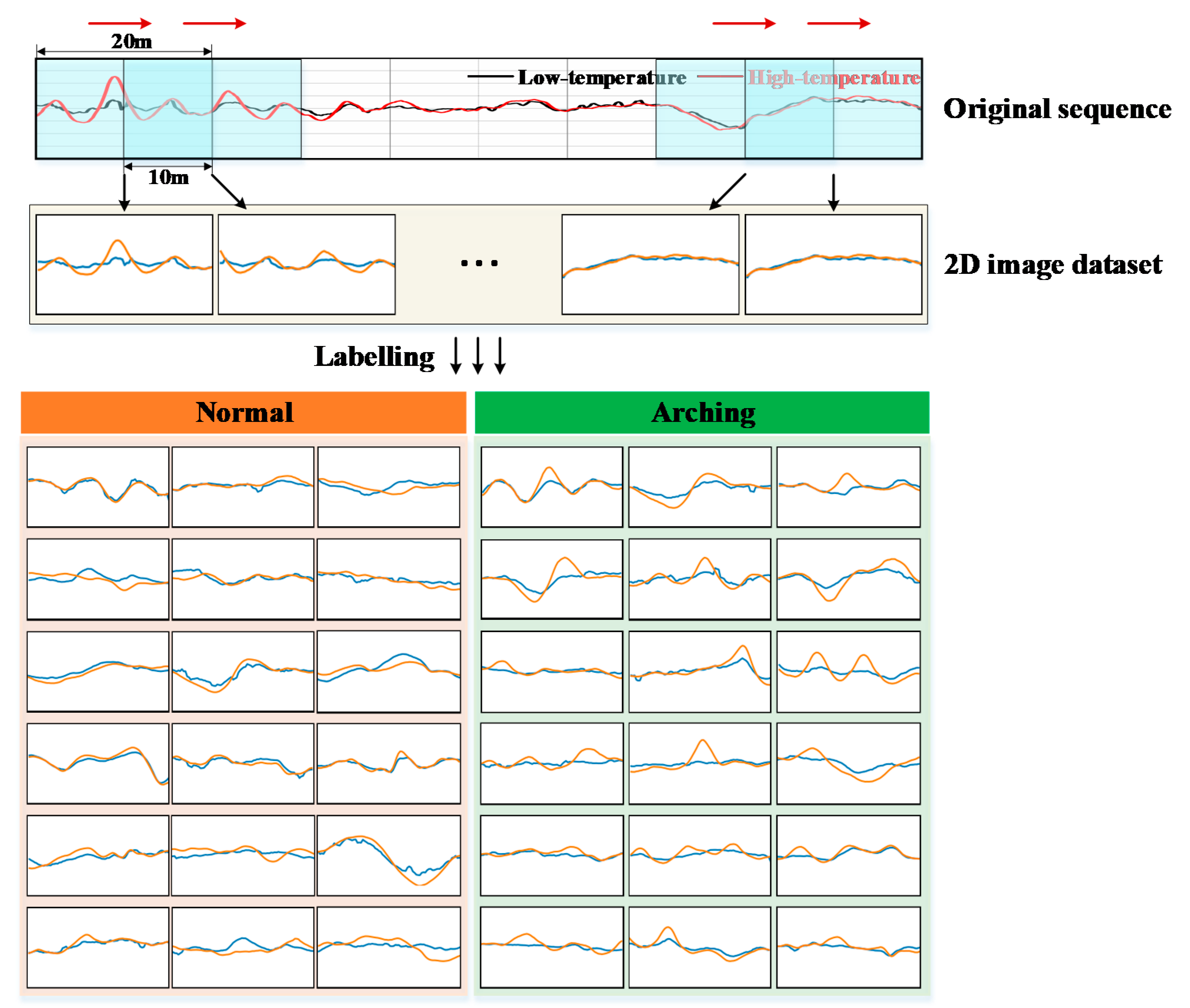
3.1. Data Conversion and Augmentation
3.2. CNN for Slab Arching Detection
4. Results and Discussion
4.1. CNN Architecture Optimization
4.2. Performance Evaluation with Various Datasets
4.3. Comparison Study with DNN
4.4. Detection Result Analysis
5. Conclusions
- (1)
- The alignment algorithm combining correlation analysis and DTW can correct the milepost deviation of different inspections effectively. Based on the aligned data, it is found that the longitudinal level irregularities can reflect slab arching, and the data wavelengths are close to the length of the track slab.
- (2)
- The proposed detection framework can accurately detect arching damage, whose Precision, Recall, and F1-score can reach 98.3%, 98.4%, and 98.4%, respectively. Moreover, the data augmentation operation and balanced set establishment can help the model extract arching features more adequately and improve the performance. As the pattern ratio changes from 6:1 to 1:1, the F1-score can increase from 92.5% to 98.0%.
- (3)
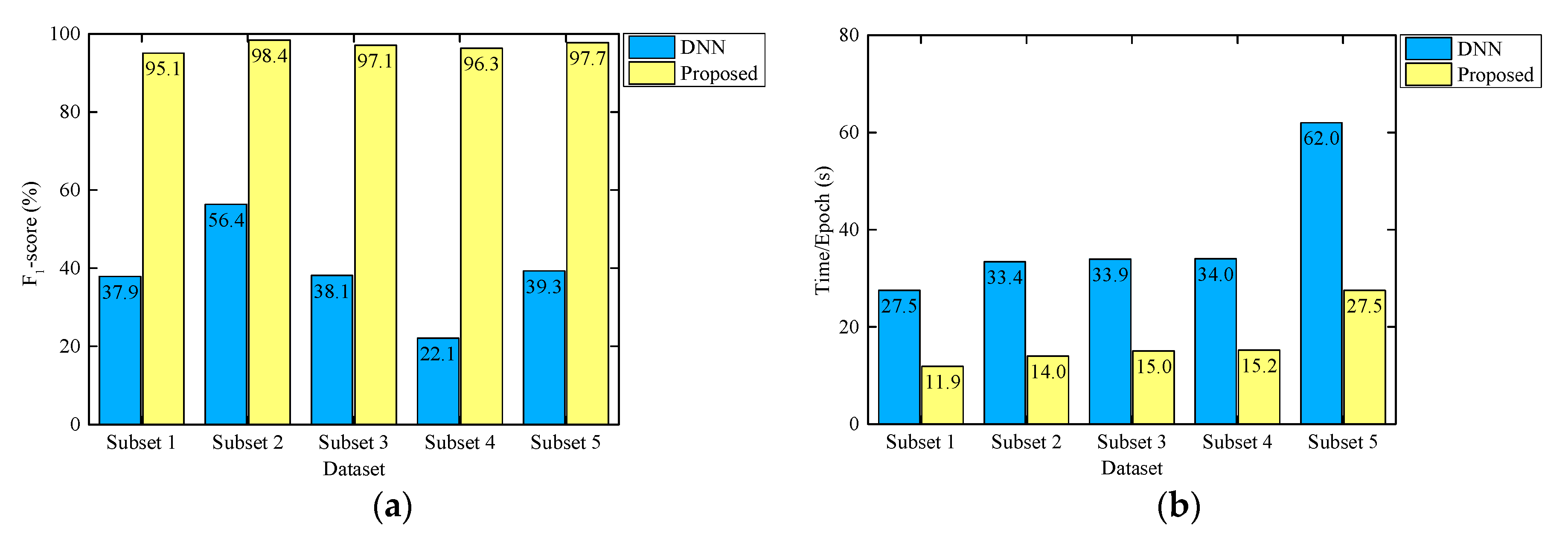
- The proposed framework outperforms the plain DNN model, showing the excellent spatial characteristics learning ability. Compared to the plain DNN, the F1-score of the proposed model increases up to 3.4 times, and the training time is reduced by 0.6.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gao, L.; An, B.; Xin, T.; Wang, J.; Wang, P. Measurement, analysis, and model updating based on the modal parameters of high-speed railway ballastless track. Measurement 2020, 161, 107891. [Google Scholar] [CrossRef]
- Ando, K.; Sunaga, M.; Aoki, H.; Haga, O. Development of slab tracks for Hokuriku Shinkansen line. Q. Rep. RTRI 2001, 42, 35–41. [Google Scholar] [CrossRef]
- Li, T.; Su, Q.; Shao, K.; Liu, J. Numerical analysis of vibration responses in high-speed railways considering mud pumping defect. Shock Vib. 2019, 2019, 9707909. [Google Scholar] [CrossRef]
- Zhong, Y.; Gao, L.; Zhang, Y. Effect of daily changing temperature on the curling behavior and interface stress of slab track in construction stage. Constr. Build. Mater. 2018, 185, 638–647. [Google Scholar] [CrossRef]
- Zhao, L.; Zhou, L.-Y.; Zhang, G.-C.; Wei, T.-Y.; Mahunon, D.A.; Jiang, L.-Q.; Zhang, Y.-Y. Experimental study of the temperature distribution in CRTS-II ballastless tracks on a high-speed railway bridge. Appl. Sci. 2020, 10, 1980. [Google Scholar] [CrossRef]
- Zhu, S.; Wang, M.; Zhai, W.; Cai, C.; Zhao, C.; Zeng, D.; Zhang, J. Mechanical property and damage evolution of concrete interface of ballastless track in high-speed railway: Experiment and simulation. Constr. Build. Mater. 2018, 187, 460–473. [Google Scholar] [CrossRef]
- Xu, Y.; Yan, D.; Zhu, W.; Zhou, Y. Study on the mechanical performance and interface damage of CRTS II slab track with debonding repairment. Constr. Build. Mater. 2020, 257, 119600. [Google Scholar] [CrossRef]
- Yu, Z.; Xie, Y.; Shan, Z.; Li, X. Fatigue performance of CRTS III slab ballastless track structure under high-speed train load based on concrete fatigue damage constitutive law. J. Adv. Concr. Technol. 2018, 16, 233–249. [Google Scholar] [CrossRef]
- Zhu, S.; Fu, Q.; Cai, C.; Spanos, P.D. Damage evolution and dynamic response of cement asphalt mortar layer of slab track under vehicle dynamic load. Sci. China Technol. Sci. 2014, 57, 1883–1894. [Google Scholar] [CrossRef]
- Ren, J.; Wang, J.; Li, X.; Wei, K.; Li, H.; Deng, S. Influence of cement asphalt mortar debonding on the damage distribution and mechanical responses of CRTS I prefabricated slab. Constr. Build. Mater. 2020, 230, 116995. [Google Scholar] [CrossRef]
- Peng, H.; Zhang, Y.; Wang, J.; Liu, Y.; Gao, L. Interfacial bonding strength between cement asphalt mortar and concrete in slab track. J. Mater. Civ. Eng. 2019, 31, 04019107. [Google Scholar] [CrossRef]
- Wang, J.; Zhou, Y.; Wu, T.; Wu, X. Performance of cement asphalt mortar in ballastless slab track over high-speed railway under extreme climate conditions. Int. J. Geomech. 2019, 19, 04019037. [Google Scholar] [CrossRef]
- Ren, J.; Li, X.; Yang, R.; Wang, P.; Xie, P. Criteria for repairing damages of CA mortar for prefabricated framework-type slab track. Constr. Build. Mater. 2016, 110, 300–311. [Google Scholar] [CrossRef]
- Li, Y.; Chen, J.; Wang, J.; Shi, X.; Chen, L. Analysis of damage of joints in CRTSII slab track under temperature and vehicle Loads. KSCE J. Civ. Eng. 2020, 24, 1209–1218. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, W.; Xiao, J.; Liu, X.; Li, W. Damage mechanism of broad-narrow Joint of CRTSII slab track under temperature rise. KSCE J. Civ. Eng. 2019, 23, 2126–2135. [Google Scholar] [CrossRef]
- Cai, X.-P.; Luo, B.-C.; Zhong, Y.-L.; Zhang, Y.-R.; Hou, B.-W. Arching mechanism of the slab joints in CRTSII slab track under high temperature conditions. Eng. Fail. Anal. 2019, 98, 95–108. [Google Scholar] [CrossRef]
- Yang, R.; Li, J.; Kang, W.; Liu, X.; Cao, S. Temperature characteristics analysis of the ballastless track under continuous hot weather. J. Transp. Eng. A-Syst. 2017, 143, 04017048. [Google Scholar] [CrossRef]
- Ren, J.; Deng, S.; Jin, Z.; Yang, J.; Liu, X. Energy method solution for the vertical deformation of longitudinally coupled prefabricated slab track. Math. Probl. Eng. 2017, 2017, 8513240. [Google Scholar] [CrossRef]
- Li, Z.-W.; Liu, X.-Z.; He, Y.-L. Identification of temperature-induced deformation for HSR slab track using track geometry measurement data. Sensors 2019, 19, 5446. [Google Scholar] [CrossRef]
- Song, X.; Zhao, C.; Zhu, X. Temperature-induced deformation of CRTS II slab track and its effect on track dynamical properties. Sci. China Technol. Sci. 2014, 57, 1917–1924. [Google Scholar] [CrossRef]
- Resendiz, E.; Hart, J.M.; Ahuja, N. Ahuja Automated visual inspection of railroad tracks. IEEE Trans. Intell. Transp. 2013, 14, 751–760. [Google Scholar] [CrossRef]
- Shao, P.; Li, H.; Wu, S.; Wang, T.; Liu, Z.; Li, H. Measurement and research on temperature warping of CRTSI track slab and crack between track slab and cement asphalt motar cushion. China Railway Sci. 2013, 34, 18–22. [Google Scholar] [CrossRef]
- Xu, J.; Wang, P.; An, B.; Ma, X.; Chen, R. Damage detection of ballastless railway tracks by the impact-echo method. Proc. Int. Civil Eng. Transp. 2018, 171, 106–114. [Google Scholar] [CrossRef]
- Zhang, J.-K.; Yan, W.; Cui, D.-M. Concrete condition assessment using impact-echo method and extreme learning machines. Sensors 2016, 16, 447. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Zhao, W.; Du, Y.; Zhang, H. Analysis on directional feature extraction for the target identification of shallow subsurface based on curvelet transform. DYNA 2017, 92, 293–299. [Google Scholar] [CrossRef]
- Huang, J.; Su, Q.; Liu, T.; Wang, W. Behavior and control of the ballastless track-subgrade vibration induced by high-speed trains moving on the subgrade bed with mud pumping. Shock Vib. 2019, 2019, 9838952. [Google Scholar] [CrossRef]
- Xu, J.; Ping, W.; Hao, L.; Hu, Z.; Rong, C. Identification of internal damage in ballastless tracks based on Gaussian curvature mode shapes. J. Vibroeng. 2016, 18, 5217–5229. [Google Scholar] [CrossRef][Green Version]
- Tang, Y. Displacement monitoring using distributed macro-strain measurement. In Proceedings of the 4th International Conference on Sensors, Measurement and Intelligent Materials (ICSMIM), Shenzhen, China, 27–28 December 2015; Atlantis Press: Paris, France, 2016; Volume 43, pp. 1103–1106. [Google Scholar]
- Minardo, A.; Coscetta, A.; Porcaro, G.; Giannetta, D.; Bernini, R.; Zeni, L. Distributed optical fiber sensors for integrated monitoring of railway infrastructures. In Proceedings of the 23rd International Conference on Optical Fibre Sensors, Santander, Spain, 2–6 June 2014; Volume 9157. [Google Scholar]
- Lestoille, N.; Soize, C.; Funfschilling, C. Stochastic prediction of high-speed train dynamics to long-term evolution of track irregularities. Mech. Res. Commun. 2016, 75, 29–39. [Google Scholar] [CrossRef]
- Mohammadi, R.; He, Q.; Ghofrani, F.; Pathak, A.; Aref, A. Exploring the impact of foot-by-foot track geometry on the occurrence of rail defects. Transport. Res. C Emer. 2019, 102, 153–172. [Google Scholar] [CrossRef]
- Sharma, S.; Cui, Y.; He, Q.; Mohammadi, R.; Li, Z. Data-driven optimization of railway maintenance for track geometry. Transport. Res. C Emer. 2018, 90, 34–58. [Google Scholar] [CrossRef]
- Li, C.; Wang, P.; Gao, T.; Wang, J.; Yang, C.; Liu, H.; He, Q. Spatial–temporal model to identify the deformation of underlying high-speed railway infrastructure. J. Transp. Eng. A Syst. 2020, 146, 04020084. [Google Scholar] [CrossRef]
- Neuhold, J.; Vidovic, I.; Marschnig, S. Preparing track geometry data for automated maintenance planning. J. Transp. Eng. A Syst. 2020, 146, 04020032. [Google Scholar] [CrossRef]
- Xin, T.; Famurewa, S.M.; Gao, L.; Kumar, U.; Zhang, Q. Grey-system-theory-based model for the prediction of track geometry quality. P. I. Mech. Eng. F J. Rai. 2015, 230, 1735–1744. [Google Scholar] [CrossRef]
- Andrade, A.R.; Teixeira, P.F. Statistical modelling of railway track geometry degradation using Hierarchical Bayesian models. Reliab. Eng. Syst. Saf. 2015, 142, 169–183. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, G.; Wang, X. Time–frequency characteristic analysis method for track geometry irregularities based on multivariate empirical mode decomposition and Hilbert spectral analysis. Veh. Syst. Dyn. 2020, 1–24. [Google Scholar] [CrossRef]
- Guler, H. Prediction of railway track geometry deterioration using artificial neural networks: A case study for Turkish state railways. Struct. Infrastruct. Eng. 2014, 10, 614–626. [Google Scholar] [CrossRef]
- Ma, L.; Xie, W.; Zhang, Y. Blister defect detection based on convolutional neural network for polymer lithium-ion battery. Appl. Sci. 2019, 9, 85. [Google Scholar] [CrossRef]
- Zhou, T.; Wang, Y.; Wang, C.; Salous, S.; Liu, L.; Tao, C. Multi-feature fusion based recognition and relevance analysis of propagation scenes for high-speed railway channels. IEEE T. Veh. Technol. 2020, 69, 8107–8118. [Google Scholar] [CrossRef]
- Wang, Q.; Bu, S.; He, Z. Achieving predictive and proactive maintenance for high-speed railway power equipment with LSTM-RNN. IEEE T. Ind. Inform. 2020, 16, 6509–6517. [Google Scholar] [CrossRef]
- Han, Y.; Liu, Z.; Lyu, Y.; Liu, K.; Li, C.; Zhang, W. Deep learning-based visual ensemble method for high-speed railway catenary clevis fracture detection. Neurocomputing 2020, 396, 556–568. [Google Scholar] [CrossRef]
- Lyu, Y.; Han, Z.; Zhong, J.; Li, C.; Liu, Z. A Generic Anomaly Detection of Catenary Support Components Based on Generative Adversarial Networks. IEEE T. Instrum Meas. 2020, 69, 2439–2448. [Google Scholar] [CrossRef]
- Ma, S.; Gao, L.; Liu, X.; Lin, J. Deep learning for track quality evaluation of high-speed railway based on vehicle-body vibration prediction. IEEE Access 2019, 7, 185099–185107. [Google Scholar] [CrossRef]
- Peng, D.; Liu, Z.; Wang, H.; Qin, Y.; Jia, L. A novel deeper one-dimensional CNN With Residual Learning for fault diagnosis of wheelset bearings in high-speed trains. IEEE Access 2019, 7, 10278–10293. [Google Scholar] [CrossRef]
- Hamadache, M.; Dutta, S.; Olaby, O.; Ambur, R.; Stewart, E.; Dixon, R. On the fault detection and diagnosis of railway switch and crossing systems: An overview. Appl. Sci. 2019, 9, 5129. [Google Scholar] [CrossRef]
- Oneto, L.; Fumeo, E.; Clerico, G.; Canepa, R.; Papa, F.; Dambra, C.; Mazzino, N.; Anguita, D. Dynamic delay predictions for large-scale railway networks: Deep and shallow extreme learning machines tuned via thresholdout. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 2754–2767. [Google Scholar] [CrossRef]
- Ye, T.; Zhang, Z.; Zhang, X.; Zhou, F. Autonomous railway traffic object detection using feature-enhanced single-shot detector. IEEE Access 2020, 8, 145182–145193. [Google Scholar] [CrossRef]
- Xu, P.; Sun, Q.; Liu, R.; Souleyrette, R.R.; Wang, F. Optimizing the alignment of inspection data from track geometry cars. Comput. Aided Civ. Inf. 2015, 30, 19–35. [Google Scholar] [CrossRef]
- Xu, P.; Sun, Q.-X.; Liu, R.-K.; Wang, F.-T. Key equipment identification model for correcting milepost errors of track geometry data from track inspection cars. Transp. Res. C Emerg. Technol. 2013, 35, 85–103. [Google Scholar] [CrossRef]
- Myers, C.; Rabiner, L.; Rosenberg, A. Performance tradeoffs in dynamic time warping algorithms for isolated word recognition. IEEE Trans. Acoust. Speech Signal Process. 1980, 28, 623–635. [Google Scholar] [CrossRef]
- Liu, L.; Li, W.; Jia, H. Method of time series similarity measurement based on dynamic time warping. CMC-Comput. Mater. Contin. 2018, 57, 97–106. [Google Scholar] [CrossRef]
- Li, H.; Wang, C. Similarity measure based on incremental warping window for time series data mining. IEEE Access 2019, 7, 3909–3917. [Google Scholar] [CrossRef]
- Pak, U.; Kim, C.; Ryu, U.; Sok, K.; Pak, S. A hybrid model based on convolutional neural networks and long short-term memory for ozone concentration prediction. Air Qual. Atmos. Health 2018, 11, 883–895. [Google Scholar] [CrossRef]
- Liang, K.; Qin, N.; Huang, D.; Fu, Y. Convolutional Recurrent Neural Network for Fault Diagnosis of High-Speed Train Bogie. Complexity 2018, 2018, 4501952. [Google Scholar] [CrossRef]
- Prappacher, N.; Bullmann, M.; Bohn, G.; Deinzer, F.; Linke, A. Defect detection on rolling element surface scans using neural image segmentation. Appl. Sci. 2020, 10, 3290. [Google Scholar] [CrossRef]
- Murthy, B.C.; Hashmi, F.M.; Bokde, D.N.; Geem, W.Z. Investigations of object detection in images/videos using various deep learning techniques and embedded platforms—A comprehensive review. Appl. Sci. 2020, 10, 3280. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Bao, Y.; Tang, Z.; Li, H.; Zhang, Y. Computer vision and deep learning–based data anomaly detection method for structural health monitoring. Struct. Health Monit. 2018, 18, 401–421. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Inspection Date | Unaligned | Aligned | ||
|---|---|---|---|---|
| E/mm | ρ | E/mm | ρ | |
| 19 January | 860.41 | 0.7735 | 473.28 | 0.9265 |
| 10 February | 1936.98 | −0.1641 | 515.89 | 0.9131 |
| 23 February | 1075.79 | 0.6300 | 569.94 | 0.8925 |
| 7 March | 1199.81 | 0.5939 | 572.70 | 0.8748 |
| 8 July | 1850.71 | 0.0192 | 663.82 | 0.8380 |
| 15 July | 1584.62 | 0.3777 | 808.91 | 0.8151 |
| 23 July | 1978.14 | 0.0718 | 985.99 | 0.7553 |
| 8 August | 2000.36 | 0.0576 | 841.28 | 0.7838 |
| 23 August | 1971.47 | 0.0310 | 754.74 | 0.8167 |
| Subset. | Training and Validation Set (Arching: Normal) | Testing Set | Total |
|---|---|---|---|
| 1 | 8922 (2974:5948 = 1:2) | Arching:5948 Normal:5948 | 20818 |
| 2 | 11896 (5948:5948 = 1:1) | 23792 | |
| 3 | 11896 (2974:8922 = 1:3) | 23792 | |
| 4 | 11896 (1700: 10196 = 1:6) | 23792 | |
| 5 | 23792 (5948:17844 = 1:3) | 35688 |
| Case | Architecture | Evaluation Metrics (%) | Time/Epoch (s) | ||
|---|---|---|---|---|---|
| Precision | Recall | F1-Score | |||
| 1 | 5 × 5 @ 6, FC 128 | 94.5 | 96.6 | 95.5 | 13.5 |
| 2 | 5 × 5 @ 6, 5 × 5 @ 12, FC 128 | 96.5 | 97.6 | 97.0 | 13.8 |
| 3 | 3 × 3 @ 6, 3 × 3 @ 12, 3 × 3 @ 24, FC 128 | 97.0 | 97.7 | 97.3 | 7.2 |
| 4 | 5 × 5 @ 6, 5 × 5 @ 12, 5 × 5 @ 24, FC 128 | 97.8 | 98.2 | 98.0 | 14.0 |
| 5 | 7 × 7 @ 6, 7 × 7 @ 12, 7 × 7 @ 24, FC 128 | 96.7 | 97.0 | 96.8 | 22.6 |
| 6 | 5 × 5 @ 6, 5 × 5 @ 12, 5 × 5 @ 24, FC 128-FC 32 | 96.8 | 98.0 | 97.4 | 14.4 |
| 7 | 5 × 5 @ 6, 5 × 5 @ 12, 5 × 5 @ 24, FC 512-FC 128 | 97.9 | 96.8 | 97.4 | 14.6 |
| 8 | 5 × 5 @ 6, 5 × 5 @ 12, 5 × 5 @ 24, FC 512-FC 128-FC 32 | 95.0 | 97.7 | 96.2 | 14.7 |
| Subset | Arching | Normal | Ground Truth | ||
|---|---|---|---|---|---|
| Detection Result | Ratio (%) | Detection Result | Ratio (%) | ||
| 1 | 5434 | 45.7 | 6320 | 54.3 | Arching: 5948 (50%) Normal: 5948 (50%) |
| 2 | 5924 | 49.8 | 5972 | 50.2 | |
| 3 | 5757 | 48.4 | 6139 | 51.6 | |
| 4 | 5526 | 46.4 | 6370 | 53.6 | |
| 5 | 5785 | 48.6 | 6111 | 51.4 | |
| Subset | Validation Set | Testing Set | ||||||
|---|---|---|---|---|---|---|---|---|
| TP | TN | FP | FN | TP | TN | FP | FN | |
| 1 | 473 | 977 | 15 | 23 | 5349 | 5863 | 85 | 599 |
| 2 | 962 | 970 | 22 | 30 | 5823 | 5847 | 101 | 125 |
| 3 | 477 | 1472 | 16 | 19 | 5693 | 5884 | 64 | 255 |
| 4 | 262 | 1680 | 20 | 22 | 5467 | 5889 | 59 | 481 |
| 5 | 956 | 2948 | 26 | 36 | 5741 | 5904 | 44 | 207 |
| PDI | Subset 1 | Subset 2 | Subset 3 | Subset 4 | Subset 5 |
|---|---|---|---|---|---|
| F1-score | 1.5 | 0.7 | 1.5 | 3.4 | 1.5 |
| Time/Epoch | 0.6 | 0.6 | 0.6 | 0.6 | 0.6 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Z.; Gao, L.; Zhong, Y.; Ma, S.; An, B. Arching Detection Method of Slab Track in High-Speed Railway Based on Track Geometry Data. Appl. Sci. 2020, 10, 6799. https://doi.org/10.3390/app10196799
Ma Z, Gao L, Zhong Y, Ma S, An B. Arching Detection Method of Slab Track in High-Speed Railway Based on Track Geometry Data. Applied Sciences. 2020; 10(19):6799. https://doi.org/10.3390/app10196799
Chicago/Turabian StyleMa, Zhuoran, Liang Gao, Yanglong Zhong, Shuai Ma, and Bolun An. 2020. "Arching Detection Method of Slab Track in High-Speed Railway Based on Track Geometry Data" Applied Sciences 10, no. 19: 6799. https://doi.org/10.3390/app10196799
APA StyleMa, Z., Gao, L., Zhong, Y., Ma, S., & An, B. (2020). Arching Detection Method of Slab Track in High-Speed Railway Based on Track Geometry Data. Applied Sciences, 10(19), 6799. https://doi.org/10.3390/app10196799