1. Introduction
The need for designing networks in a supply chain has been attracting a lot of attention in recent years; a result of the booming development of industrial commerce. A practice in traditional commerce is that customers can return the unsatisfactory products they bought within a given certain period of time. This process is called the reverse logistics by which the products are returned for proper planning of their disposal [
1]. Reverse logistics can also be defined as the process of moving goods for capturing value. Efficient reverse logistics can reduce cost especially transportation cost, shipping cost, and inventory cost. Besides that, it also improves the service by offering a fast response to the demands and returns from customers. By implementing reverse logistics in supply chain network design, the expectation of a gain in both profit and increased customer retention can be expected, benefiting both from the economic and social factor of the economy respectively [
2].
Reverse logistics is necessary for various reasons; such as the increasing trend in customers’ returns, product lifecycles, and demanding customers [
3]. To maintain a high level of customer satisfaction and quickly respond to the complaints, some industries are willing to handle those returns on their own and thus strive to provide an efficient logistics system to accommodate this. Hence, one can argue that it is necessary for the reverse logistics network and logistics process to be integrated. Nowadays, a large number of organizations are experiencing high volumes of product returns. Managing product returns in reverse logistics depends on detailed planning, especially when the volume of return flow had increased considerably [
4]. The returned products can be re-entered into the market to be resold either with or without some refurbish process depending on the condition of the products. Returned products can be categorized into two categories which are defect or non-defect products. The non-defect products will be re-sold in the next batch while the defect products will need to go through the process of refurbishing before re-entering the market [
5].
In supply chain network design, besides facility location and vehicle routing, inventory control is also considered an important part of the whole process of optimization. Designing a distribution network consists of the three sub-problems which is essential to drive the key performance for the overall productivity and profitability. Looking at previous works from literature, most of the studies done focused on the integration of only two sub-problems such as location-routing problem (LRP), Inventory-Routing Problem (IRP), or Location-Inventory Problem (LIP). We found work on the integration of all three sub-problems, i.e., Location-Inventory-Routing Problem (LIRP) to be very limited especially those utilising the Economic Production Quantity (EPQ) model. There is a body of literature with regards to the EOQ model. The EOQ model determines the optimal order quantity a company should purchase from other companies to minimize inventory cost. On the other hand, the EPQ model determines the optimal production quantity for manufacturing. The main difference between these two models is that the EPQ model assumes the company will produce its own quantity, therefore the orders are available in an incremental manner while the products are being produced. While the EOQ model assumes the order quantity arrives complete and immediately after ordering, meaning that the parts are produced by another company and are ready to be shipped when the order is made.
Since the EPQ model is less researched despite being a practice of most companies in the industry, we propose the LIRP utilizes the EPQ model for defect and non-defect items in reverse logistics. The problem is solved by a hybrid harmony search-simulated annealing (HS-SA) algorithm. The proposed algorithm incorporates the dynamic values of harmony memory considering rate (HMCR) and pitch adjustment rate (PAR) with the local optimization techniques from a HS, to hybridize with the idea of probabilistic acceptance rule from the SA to deal with premature convergence. Computational experiments on the popular benchmark dataset of Perl, Gaskell, and Christofides show that the proposed algorithm outperformed a standard HS and an improved HS for all cases.
This study is the extension of the research from [
6,
7]. The idea of solving the vehicle routing problem (VRP) using a standard HS algorithm is first proposed in [
6]. The problem is further extended into the LRP in [
7]. The HS in [
6] solved the VRP using four local search techniques with fixed values of HMCR and PAR. In [
7], they introduced the dynamic values of HMCR and PAR to solve the LRP. In this paper, we extended the methodology in [
7] to solve the LIRP by adding two popular local search methods: 2-opt and 3-opt, as the local optimization techniques. The proposed HS is further enhanced by hybridizing it with SA with the implementation of probabilistic acceptance rule during the improvisation procedure of the HS.
The remainders of the paper are organized as follows: the literature review of supply chain network design is presented in
Section 2. The mathematical formulation of the LIRP with EPQ model is given in
Section 3.
Section 4 describes the framework and procedures of the proposed hybrid HS-SA algorithm. The computational experiments on three sets of popular benchmark datasets are performed, and the results are discussed in
Section 5. Lastly, the conclusions and future direction are given in
Section 6.
2. Literature Review
The warehouse LRP (WLRP) is first proposed by [
8]. The problem is decomposed into three sub-problems: Multi-Depot Vehicle Routing Problem (MDVRP), Warehouse Location-Allocation Problem (WLAP), and Multi-Depot Routing Allocation Problem (MDRAP) and is solved using the heuristic approach. Some other studies divided the problem into two phases [
9]. The first phase is a LAP and the VRP follows in the second phase. The problem is solved sequentially and iteratively by SA. Reference [
10] discussed the capacitated LRP under disruption and implemented several approaches in problem-solving such as metaheuristic based on maximum-likelihood sampling method, route-allocation improvement, two-stage neighborhood search and SA.
A two-phase hybrid heuristic search approach for LRP is introduced in [
11]. The problem is decomposed into LAP and VRP. For the construction of the location distribution, they proposed a Tabu Search (TS) to determine a good configuration of the facilities to be used. Meanwhile, an Ant Colony Algorithm (ACO) was used at the routing phase to obtain good routes for the given configuration. The combination of Particle Swarm Optimization (PSO) with several heuristic algorithms is called Hybrid PSO (HybPSO-LRP) and is introduced in [
12]. They combined the Multiple Phase Neighborhood Search-Greedy Randomized Adaptive Search Procedure (MPNS-GRASP) algorithm, the Expending Neighborhood Search (ENS) strategy, and a Path Relinking (PR) strategy into the PSO. With the same approach used in [
12], reference [
13] combined the same techniques with the Honey Bee Mating Optimization (HBMO). They solved the problem using a hybrid HBMO for LRP (HBMO-LRP).
We found several studies on the integrated IRP from literature. For example, reference [
14] solved a multi-objective coordination in a supply chain with three objective functions: maximizing the firm’s profit, minimizing vendor’s routing, and maximizing the average service level of buyers. They determined the vehicle routing, the router assigned and the amount delivered for each buyer. A HS algorithm is proposed due to the complexity of the problem. Considering the environmental impact, authors in [
15] proposed a green IRP to minimize the total cost of inventory and routing, vehicle fixed cost, and emissions that are determined by load, distance, speed, and vehicle characteristics. They employed an exact method which is a Branch-and-Cut Algorithm (BCA) to add user cuts to the model and used a commercial solver to solve the linear programming relaxation problem. Similar to [
16], they analyzed the benefits of collaborative energy use (CO
2 emission) and perishability in IRP with uncertain demand. The authors minimized the cost of routing, based on fuel and wage cost, waste, driving time and inventory. The problem is solved by the ILOG-OPL development studio and CPLEX 12.6 optimization.
A new bi-objective mathematical model which takes into account the economic, social, and environmental issues in the distribution of perishable products with a specified expiration date in IRPs is considered in [
17]. They focused on inventory and distribution costs for the first objective and then looked at social issues to shape the second objective by considering the rate of accidents for the vehicle and the number of expired products. The Torabi-Hassani method was used and included vehicle noise emission as a constraint. The integrated Production, Inventory, and Distribution Routing Problem (PIDRP) was developed and solved heuristically with two solutions approach [
18]. In the first phase, they solved the Mixed-Integer Program (MIP) with CPLEX MIP solver and in the second phase, they solved an associated consolidation problem to handle the potential inefficiency of direct shipments involving routing and inventories by Extended Optimal Partitioning (EOP) procedure. This approach can simultaneously coordinate the production, inventory, and transportation operation in PIDRP. The two-step procedure is getting more attention in solving IRP, researchers in [
19] performed a comparative analysis of a series of heuristics for manufacturing supply chain with a MIP formulation and two-step procedure development. The first step is to estimate the daily delivery quantities and followed by solving a VRP in the second step. A previously developed branch-and-price algorithm is used and the production decision and inventory flow balance were taken into account in the model.
Besides IRP, the integrated LIP is also gaining popularity. An optimization model for perishable products with fuzzy capacity and carbon emission constraints for integrated LIP is proposed by [
20]. They formulated a Mixed-Integer Nonlinear Programming (MINP) and is solved by using two methods which are Hybrid Genetic Algorithm (HGA) and Hybrid HS (HHS). They found that HHS gave a better solution but needed higher computing time when compared to the HGA. The LIP under vendor-managed inventory was considered by [
21]. They solved the multi-objective LIP model based on the Non-dominated Sorting Genetic Algorithm (NSGA-II). This method gave promising solutions when compared with the well-known multi-objective evolutionary algorithm. By using the same approach as in [
21] but hybridized with the Multi-objective Particle Swarm Optimization (MOPSO), a bi-dynamic closed-loop LIP under facility disruption risk is proposed in [
22]. They considered the effectiveness of returned products in a period and retailer demand in the next period. The bi-level programming problem where the upper level is for determining the appropriate location of 3rd checking sites and the lower level is to present the coordinated inventory replenishment is studied by [
23]. They considered the location and inventory policies in the supply chain when product returns are allowed.
Other related study of LIP can be found in [
24]. The authors focused on three decisions which are the determination of depot locations, the allocation of flows, and the shipment sizes. Nonlinear continuous programming is formulated and an iterative heuristic is developed to estimate the depot flows, to solve the linear program, and to improve the flow depot. Meanwhile, researchers in [
25] explored the continuous non-linear formulation for LIP with uncertain demand that integrates location, allocation, and inventory decisions. They solved the linear program using a heuristic algorithm and used the solution to improve the variable estimators for the next iteration. A closed-loop LIP is considered by [
26] that determines which depot and remanufacturing centre need to be opened. An exact two-phase Lagrangian relaxation algorithm is developed and a mixed-integer nonlinear location-allocation model is formulated. Extension to the study in [
26], an equivalent formulation with fewer nonlinear terms in the objective function is proposed in [
27]. They used piecewise linearization to transform and solve it using CPLEX. Then the solution in CPLEX is compared with two previously published Lagrangian relaxation-based heuristic.
With respect to the LIRP, some of the researchers focus only on the non-defect items in reverse logistics such as in [
28]. They solved the LIRP of the e-supply chain environment by using a Hybrid Genetic Simulated Annealing Algorithm (HGSAA) and compared it to a standard GA. Reference [
29] used a Pseudo-Parallel Genetic Algorithm Integrating Simulated Annealing (PPGSA) to solve stochastic LIRP with continuous review inventory policy. Reverse logistics considering both defect and non-defect items of returned products has also been studied by [
30]. They considered both quality of returned products in the e-commerce supply chain system. They found that the Hybrid Ant Colony Optimization algorithm (HACO) was considerably efficient and effective compared to a standard ACO. New TS (NTS) has been proposed by [
31] to simultaneously integrate the LIRP and considered the minimization of manufacturing goods for new products and remanufacturing goods for damaged products in the objective function.
Based on the literature, we believe that each of the decision planning stages in the supply chain has equal significance. Recently, many industries aim to minimize the cost of suppliers by producing their own products. As the industries nowadays are trying to be greener and at the same time handle the reverse logistics effectively, they prefer to deal directly with the customers from manufacturing stage until the process of recovering the returns products. The EPQ model is gaining attention to be practiced among industries, especially among manufacturing and remanufacturing companies. With this in mind, the LIRP with EPQ model in reverse logistics is considered in this study to give new insights and solutions to the manufacturing industries in optimizing the production and inventory.
3. Mathematical Formulation of LIRP with EPQ Model
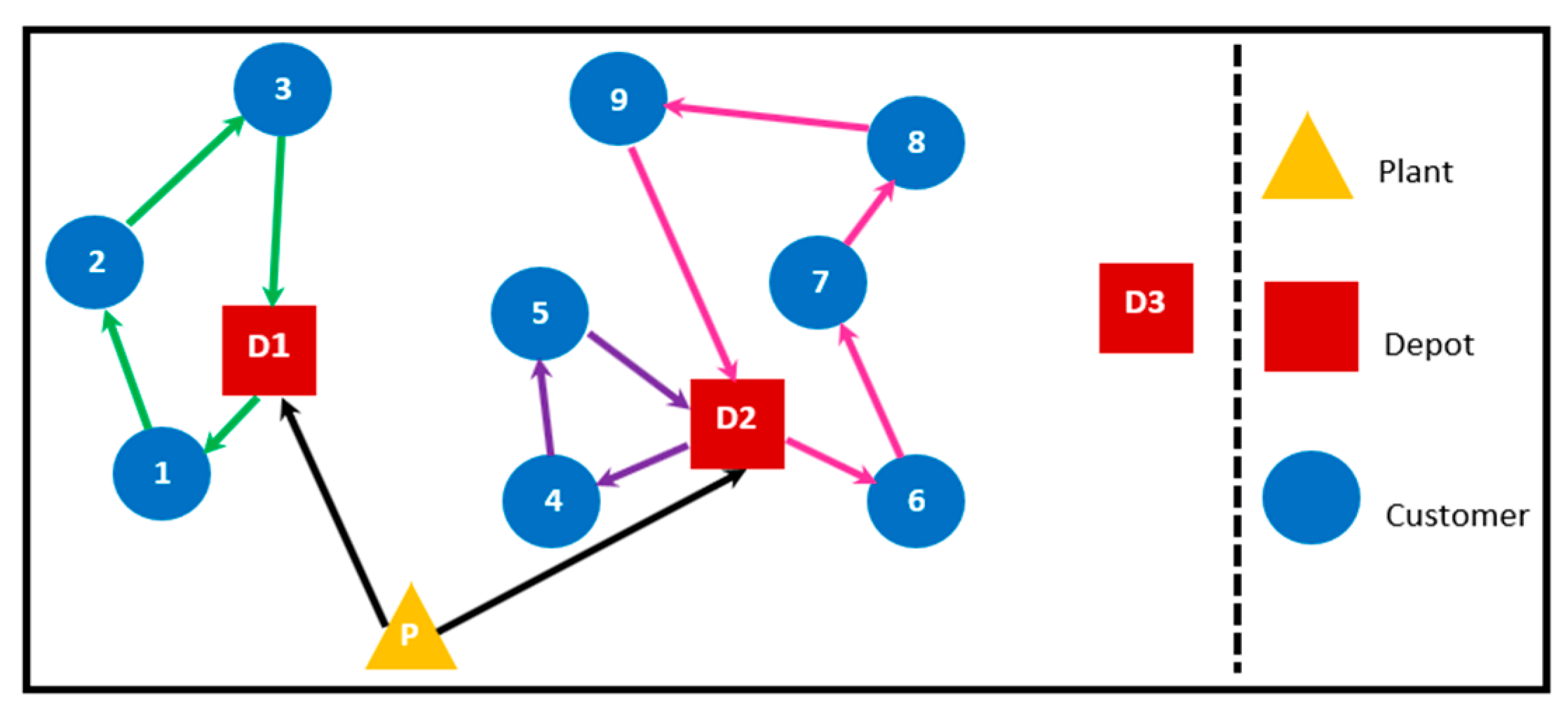
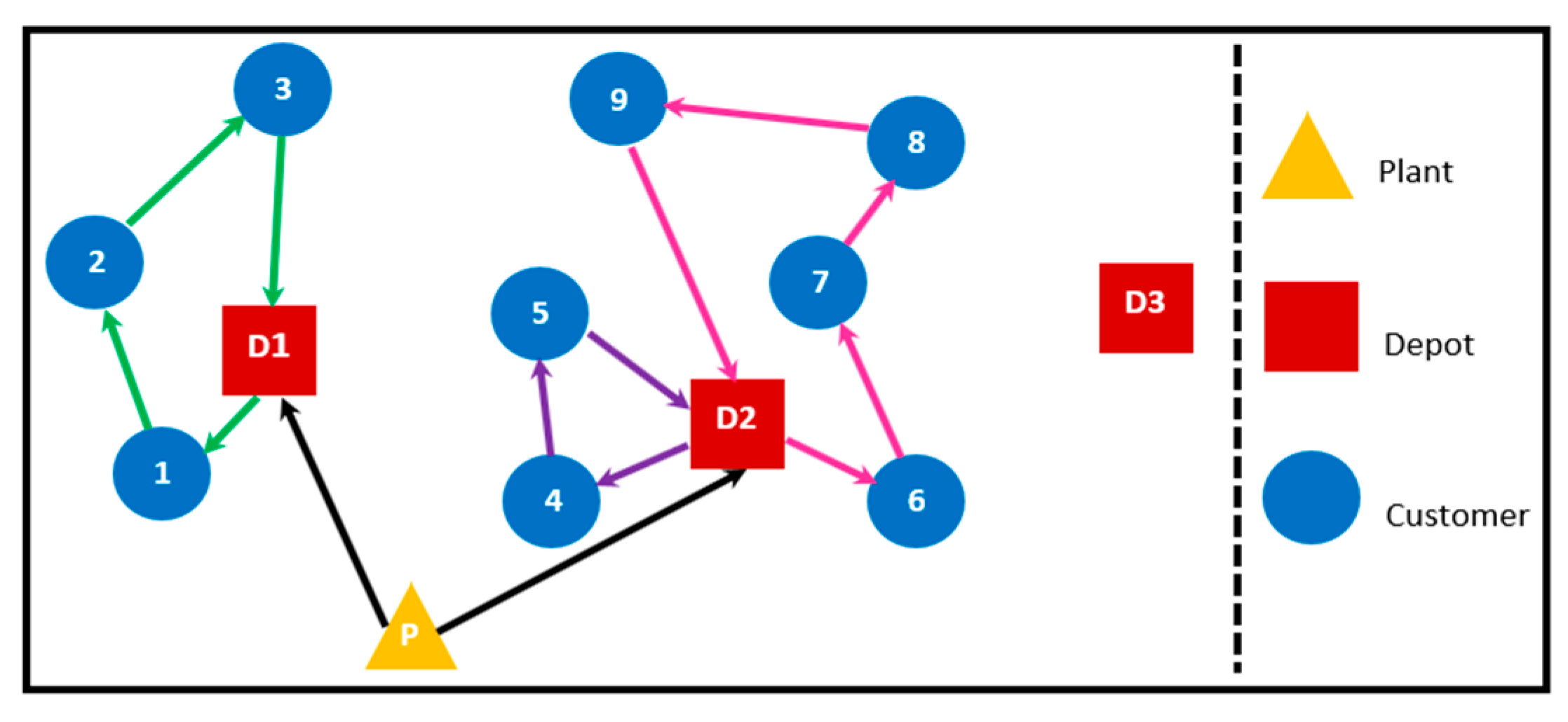
Given a set of the potential depots with fixed locations and customers with known demands and returns, the LIRP with EPQ model in reverse logistics is designed to determine the optimal location and number of open depots, the production quantity produced at each open depot as well as the routing of the assigned customers with known demands and returns to the open depots. The depots will function as a distributor as well as a collector. At the depot, the condition of the returned products will be inspected and classified into two categories: defect and non-defect items. The production setup cost will be affected where the non-defect items re-enters into the market, while the defect items will need to be counted in the process of production planning. The objective of the LIRP is to minimize the cost of establishing facilities, cost of inventory including production setup and holding, and cost of distance travelled by vehicles.
Figure 1 shows an example of LIRP in the supply chain with three depots and nine customers. It can be seen from
Figure 1 that customers 1, 2, and 3 are served by depot 1, while the remaining 6 customers are served by depot 2 using two vehicles. Depot 3 remains closed.
The mathematical formulation of LIRP with the EPQ model is given as follows. The objective and constraints are given below:
Sets:
= set of all depots .
= set of all customers .
= set of all vehicles .
= set of depots and customers .
Input Parameters:
= demand of customer .
= non-defect items returned by customer .
= defect items returned by customer .
returned products by customer ().
= distance from to .
= capacity of vehicle .
= number of customers.
= fixed operating cost of depot .
= distance cost per mile.
= maximum through at the depot .
= setup cost per production.
= holding cost per unit inventory.
= production rate.
= total load of customer at depot by vehicle .
Decision Variables:
= optimal number of production quantity for each depot ,
= auxiliary variable for sub-tour elimination constraint in vehicle of customer .
The objective function of LIRP (Equation (1)) is to minimize the total fixed operating cost of depots, the total distance travelled cost by the vehicles, and the total cost of production setup and inventory holding. Constraints in Equations (2) and (3) indicate that each of the customers must be assigned in a single route and it can be served by only one vehicle. The total demands and total returns at each route cannot exceed the vehicle capacity limit and the total load on the vehicle at any arc must not exceed the vehicle capacity. These constraints are shown in Equations (4)–(6), respectively. Equation (7) states that the vehicle must start and end at the same depot. Besides the vehicle capacity limit, the capacity constraint for the depot is given in Equation (8). Equation (9) represents the new sub tour elimination constraint and Equation (10) specified that the customer will be assigned to the depot if there is a route from the depot. The binary values on the decision variable and the positive values for the auxiliary variable are defined in Equations (11)–(15), respectively.
Based on the objective function given in Equation (1), the total cost of inventory (TCI) consists of production setup cost and holding inventory cost. The optimal value of can be obtained by deriving the first derivative of the cost function in Equation (16) with respect to as follows:
TCI = Production setup cost + Inventory holding cost
Let
0, hence
The cost function of TCI is a convex function where the second derivative of the function is always non-negative (Equation (20)).
From the objective function in Equation (1), we determine three decision planning as follows:
- (1)
the number of open depots and assigned customers at each open depot.
- (2)
the routing of vehicles delivering demands from the depot to the customers.
- (3)
the optimal number of production quantity of each open depot.
We solve the problem iteratively where the allocation of customers to each depot has been assigned at the first stage with the possible number of open depots. At this stage, the vehicle capacity limit constraint has been relaxed. At the second stage, the process of minimizing location and routing with considering vehicle capacity constraint is done. To obtain the cost of inventory as stated in the objective function, the is calculated by the Equation (19) where the formulation is depending on the decision variable of and the total demand and returned from each customer at each depot. In other words, the inventory cost will be calculated when the decision variable for location and routing are found throughout the process of improvisation at each iteration. The process of minimizing the overall cost depends on the total operating depots, delivery routing, and inventory planning.
5. Computational Experiments and Discussion
In this section, computational experiments are performed to illustrate the performance of the proposed hybrid HS-SA compared with other approaches in the literature. The proposed algorithm is coded in MATLAB software R2017b on a laptop computer with 1.60 GHz Intel
® Core™ i5-4200U CPU with 8 GB of RAM. The parameters configuration of the proposed algorithm is provided in
Table 1. The test problem instances are three popular benchmark datasets of Perl, Gaskell, and Christofides with additional simulated data of returned products and production rate. The additional data were generated randomly by using a uniform distribution. The production rate is set to be greater than the total demand and returns,
while the returned products,
are generated by the uniform distribution of
. We set 70% of the returned products as the non-defects (
) items while the remaining are the defect items (
). The characteristics of the dataset are given in
Table 2.
To solve the LIRP problem, the location and allocation of the depots and customers are solved first. In the location-allocation problem, each of the customers is initially assigned to the nearest depots based on the Euclidean distance formulation. The customers will be moved around to the possible depots during the process of improvisation. The vehicle capacity limit constraint has been relaxed to minimize the number of open depots and it is assumed that only one vehicle is being used at each depot. However, the depot capacity limit should not be violated during the process. Then, the allocation of customers at each depot needs to be sequenced and divided into vehicles according to the vehicle capacity limit. This process is performed among the open depots only. The process of local optimization is performed within the open depots. Both depot capacity limits and vehicle capacity limits should not be violated. Finally, the inventory part is included during the process of minimizing the cost.
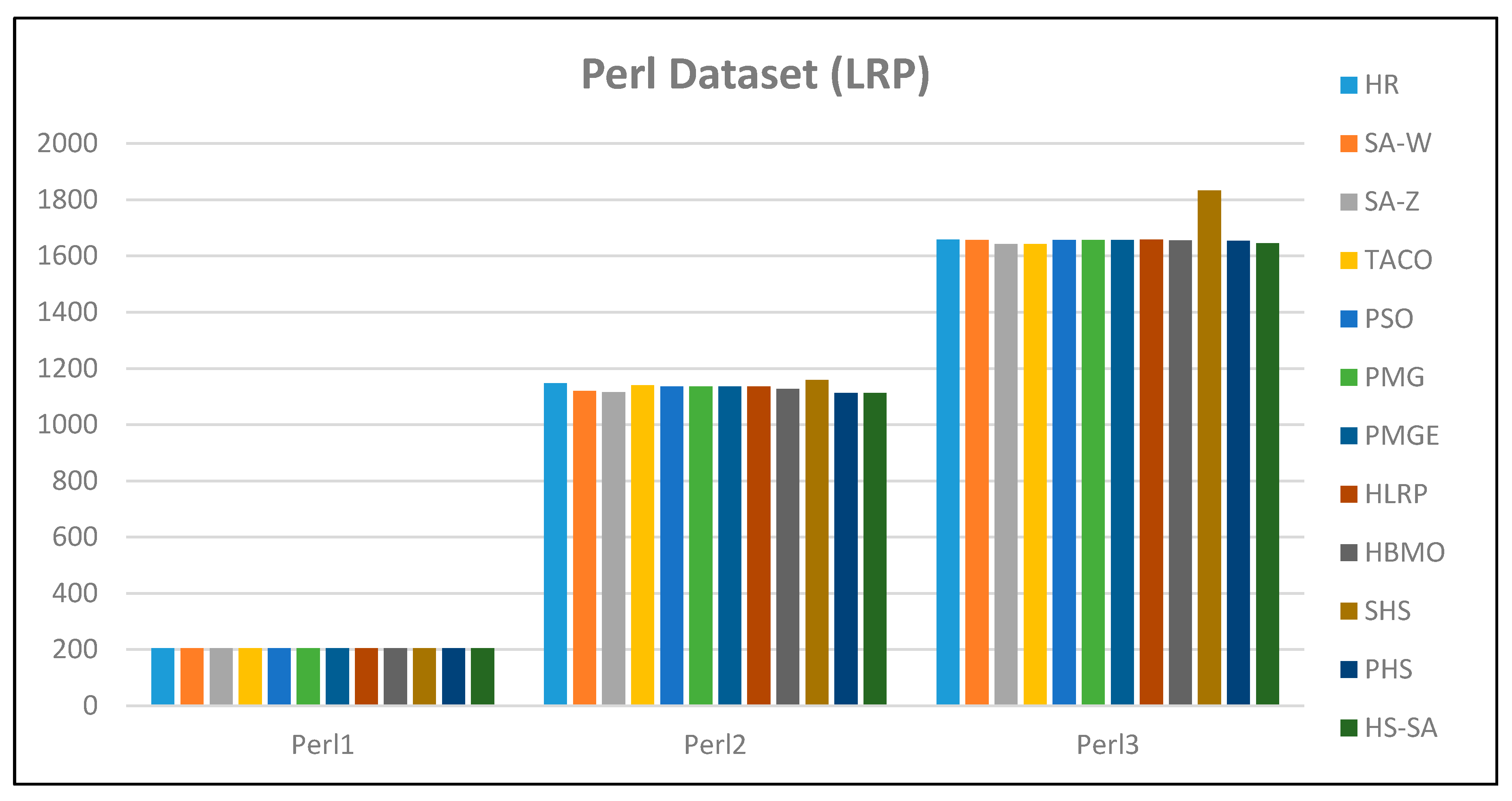
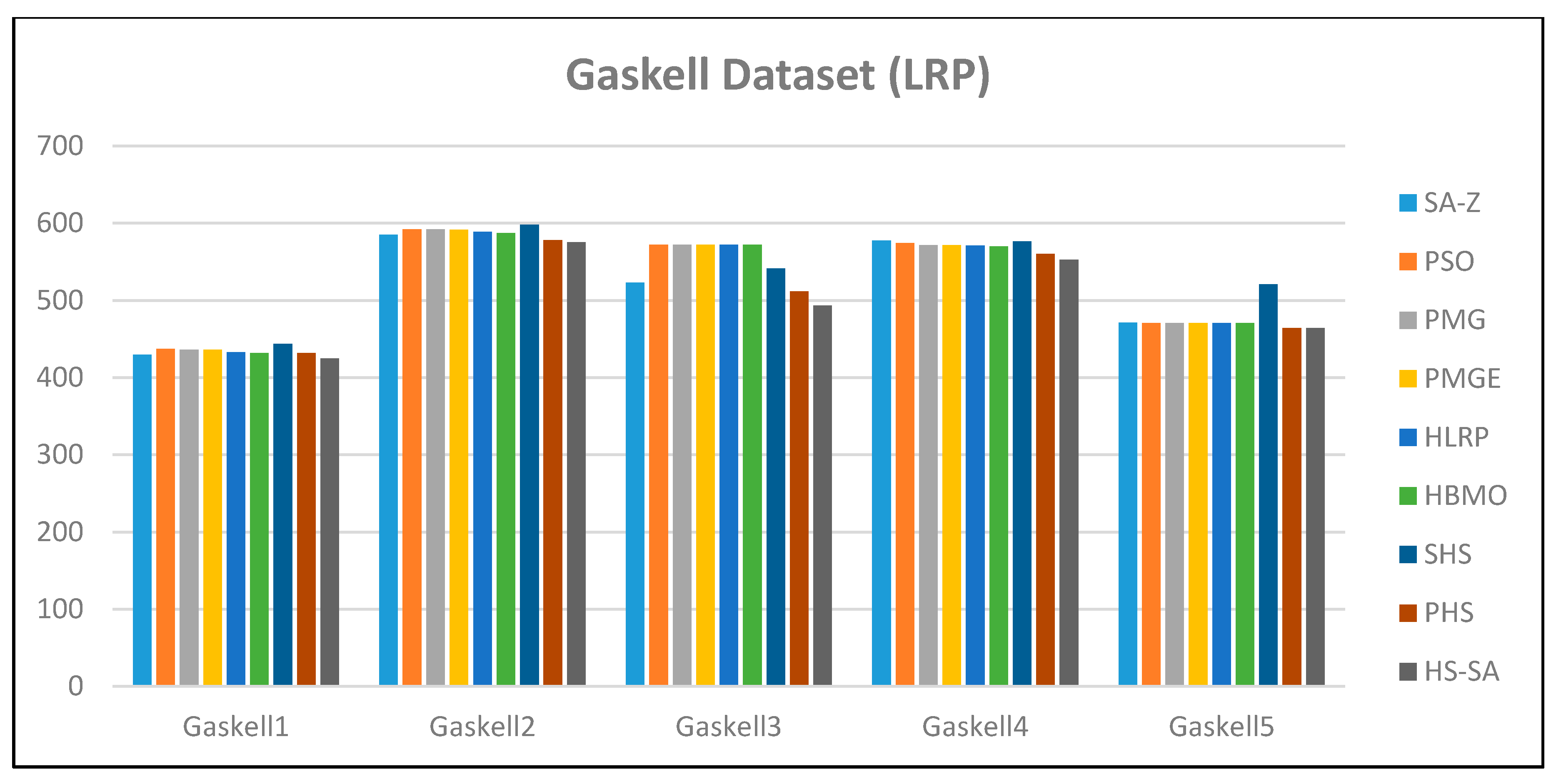
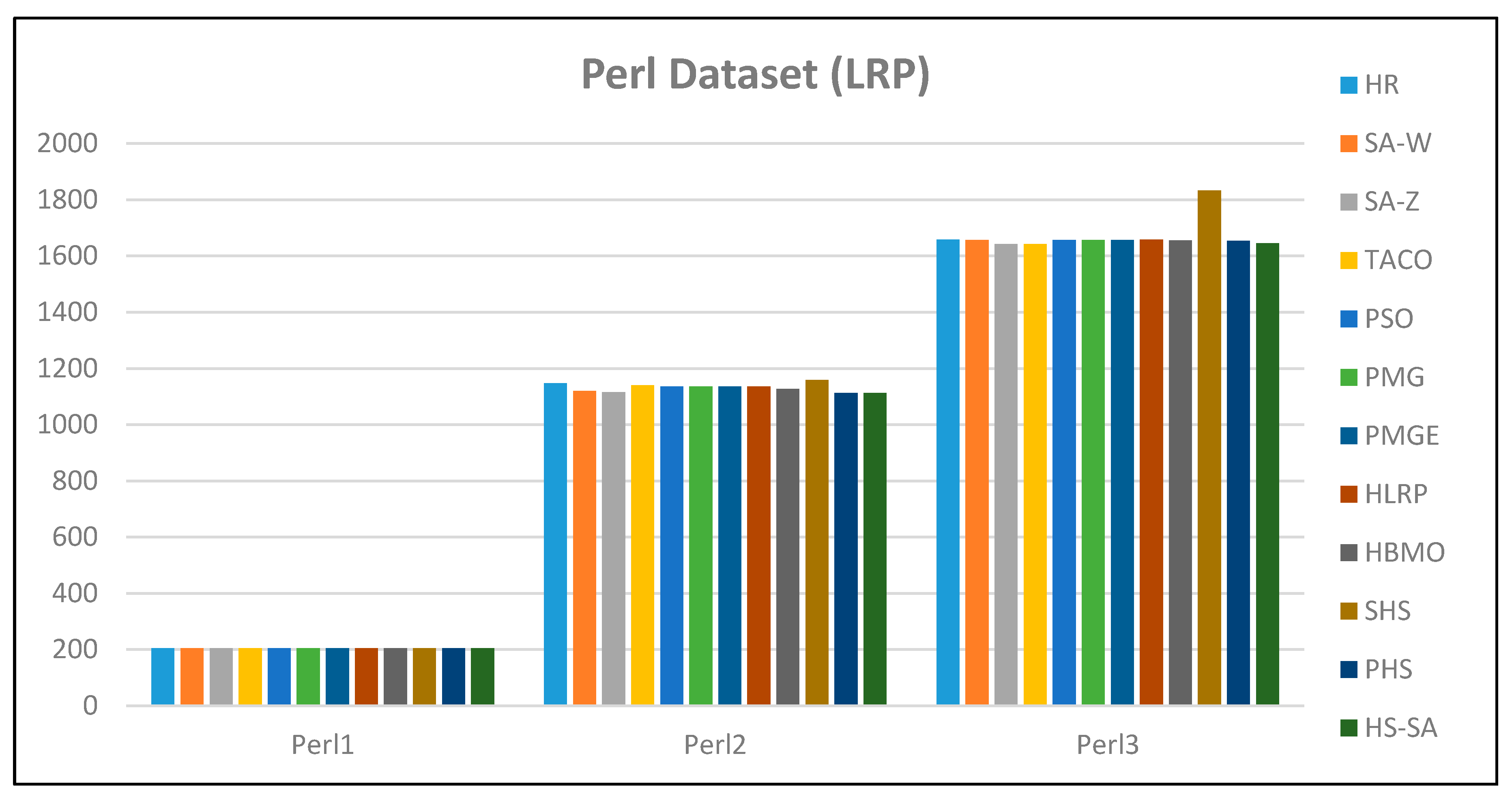
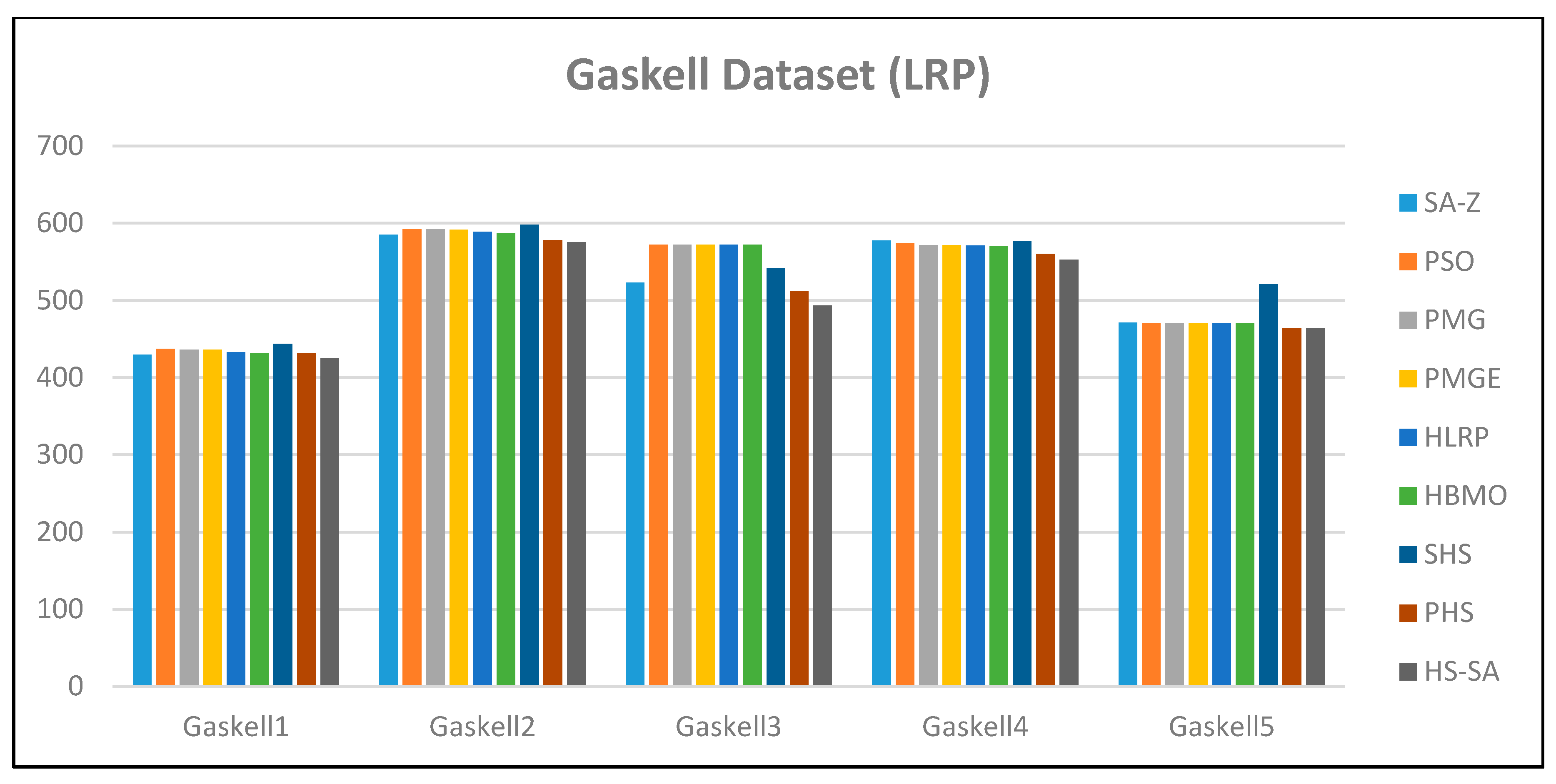
Since there is no study on the LIRP that utilizes the EPQ model for defect and non-defect items in reverse logistics from the literature, in order to validate the performance of the proposed hybrid HS-SA algorithm, the LRP will be solved first and compared with other heuristics and metaheuristics found in the literature that used the same benchmark datasets.
Table 3,
Table 4 and
Table 5 present the comparative results of the three benchmark datasets on the proposed hybrid HS-SA with the heuristic method (HR) of [
8], simulated annealing in [
9] (SA-W) and [
10] (SA-Z), hybrid tabu search and ant colony (TACO) from [
11], particle swarm optimization (PSO) with different variants of particle swarm optimization which are: standard PSO, PSO with MPNS-GRASP (PMG), PSO with MPNS-GRASP and ENS (PMGE) and hybrid PSO (HLRP) in [
12] and honey bee mating optimization (HBMO) in [
13]. A standard HS (SHS) and the proposed HS (PHS) from [
7] are also included for comparison in all experiments. For each problem instances, the proposed algorithm as well as SHS and PHS are performed for 10 independent runs. In each table, note that the numerical results of the selected algorithms are extracted from the original papers found in the literature and the best result of each problem instances is highlighted in bold.
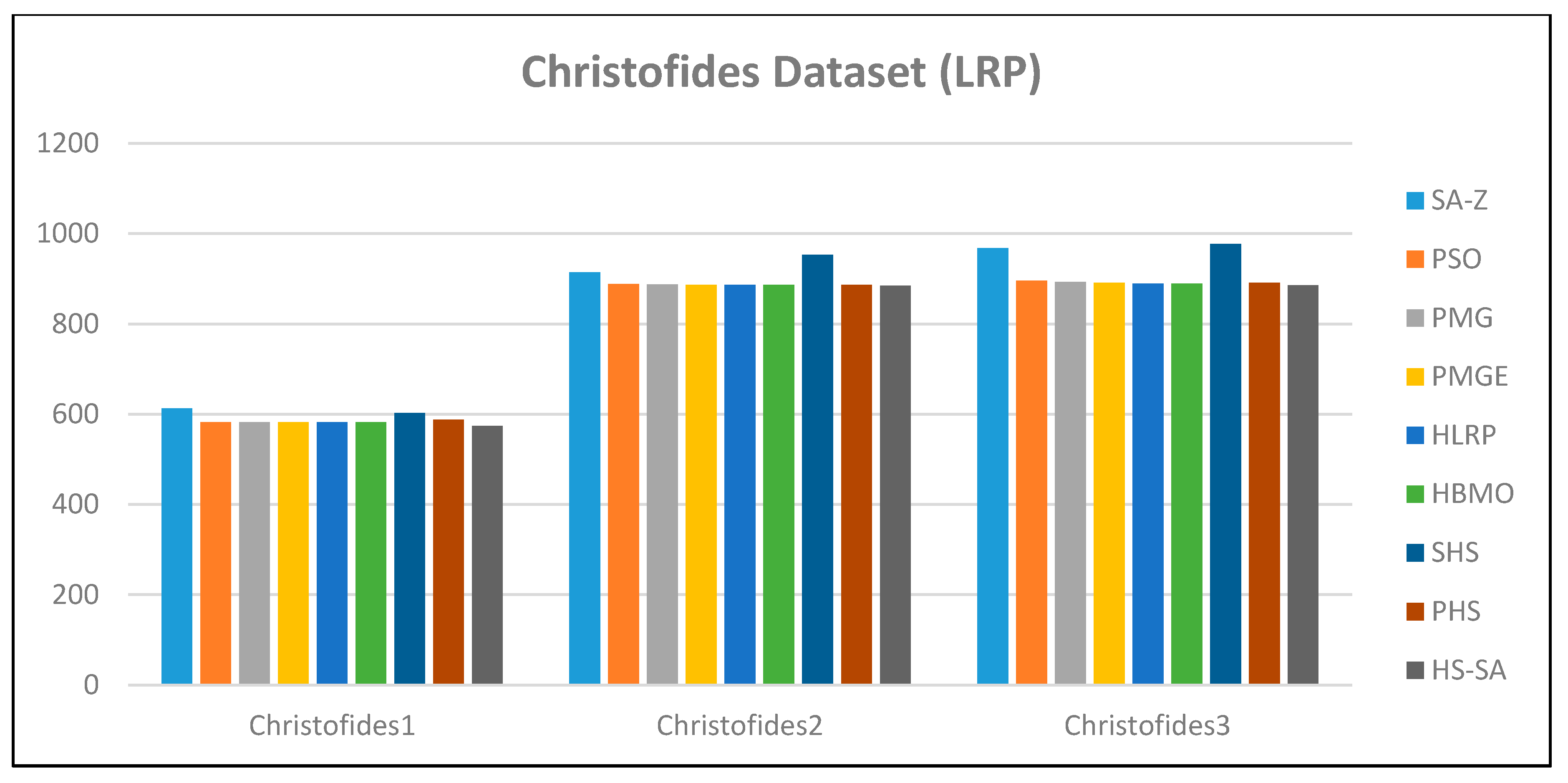
Figure 3,
Figure 4 and
Figure 5 illustrate the results of
Table 3,
Table 4 and
Table 5 in a bar chart respectively.
As compared to the SHS and PHS in [
7], the hybrid HS-SA performed significantly better for all instances in Perl, Gaskell, and Christofides, except Perl 1. However, for Perl 3, results in SA-Z [
10] and TACO [
11] are slightly better than the hybrid HS-SA algorithm. All algorithms managed to find the optimal solution in Perl 1 since the number of customers and depots are small. The SHS did not perform well for medium and large size. This indicates that the SHS should be improved and modified to get better solutions [
7]. From the numerical experiments in LRP, hybrid HS-SA has successfully solved the problem with comparable results. Therefore, the proposed algorithm will be used to solve the LIRP that utilizes the EPQ model for defect and non-defect items in reverse logistics.
The computational results for all test instances in LIRP are shown in
Table 6,
Table 7 and
Table 8. Since there is no benchmark for the EPQ model in LIRP, the comparison is assessed between the hybrid HS-SA algorithm with SHS and PHS only. All algorithms are performed for 10 independent runs and the mean, standard deviation, coefficient of variation (C.V.), and the best result of each algorithm are reported in column 3–6 respectively. The Wilcoxon signed-rank test with
is performed to test the significance of the results. As the Wilcoxon signed-rank test does not assume normality in the data, it can be used when this assumption has been violated and the use of the dependent
t-test is inappropriate. The
p-value of the test is reported in the last column of the tables. The best result of each problem instances is highlighted in bold. In addition, the best result of the all problem instances are summarized as a bar chart in
Figure 6.
The Wilcoxon signed-rank test elicits a statistical significant difference in the performance of finding the minimum cost of the LIRP between the hybrid HS-SA and the SHS and PHS across all the datasets (
p-value < 0.005) based on the difference in the median cost. These tests are used to show that the results are significant, supporting that the proposed algorithm will produce results that are different from the results of the SHS and PHS. Apart from the Perl 1 instance where the proposed algorithm produced the same results as SHS and PHS, all other datasets showed
p-values of less than 0.05. This means the results generated by the hybrid HS-SA is significant and different from the values from the SHA and PHS. So, the results from the proposed algorithm is significant from the other works, but is it better? From
Table 6,
Table 7 and
Table 8, the hybrid HS-SA outperforms the solutions in SHS and PHS for all cases of datasets of Perl, Gaskell, and Christofides. For this, we use the C.V. values. The lower the value of the C.V., the more precise the estimate. As reported in
Table 6,
Table 7 and
Table 8, all the C.V. values are low which supports the high predictiveness of the proposed algorithm.
Table 9,
Table 10 and
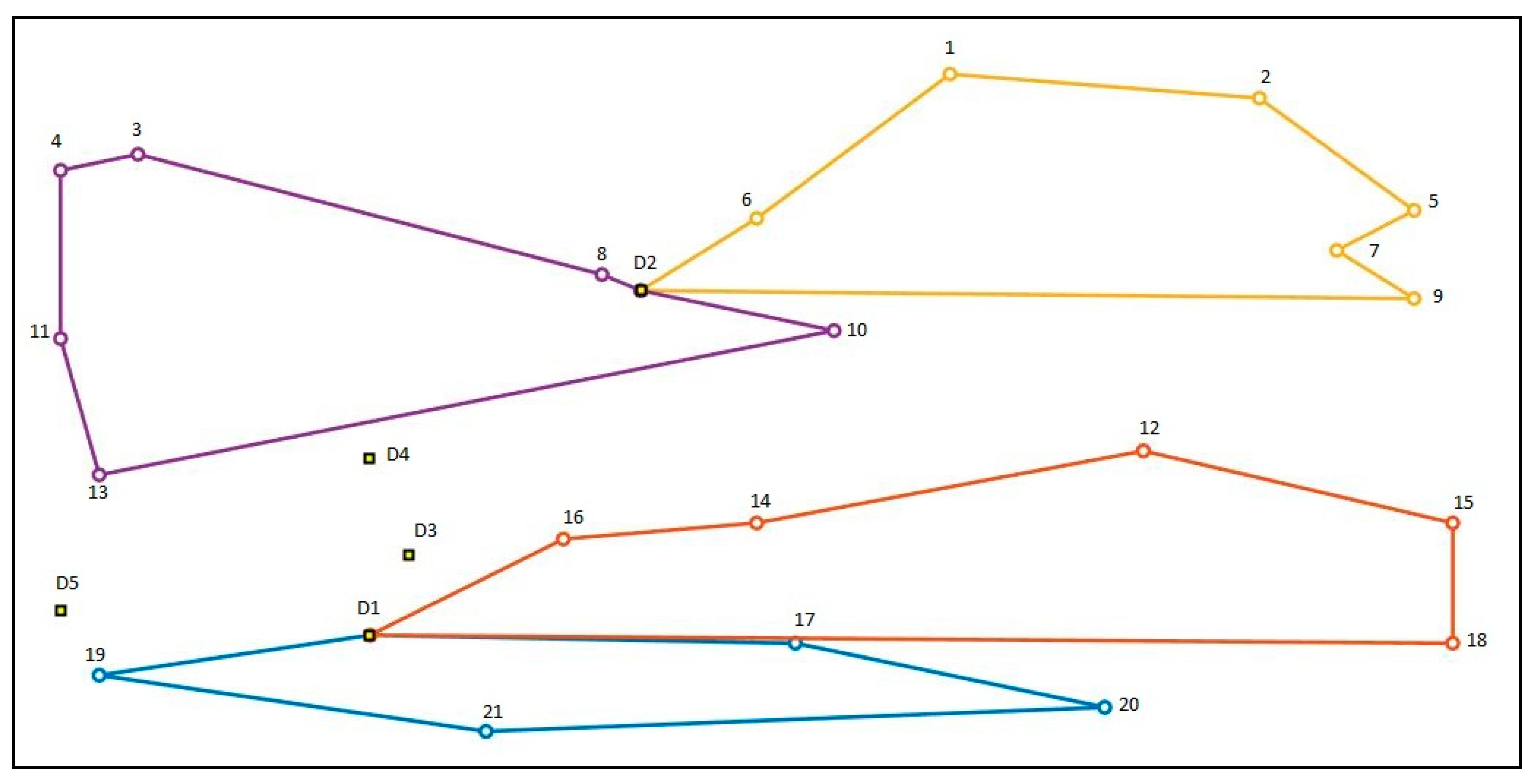
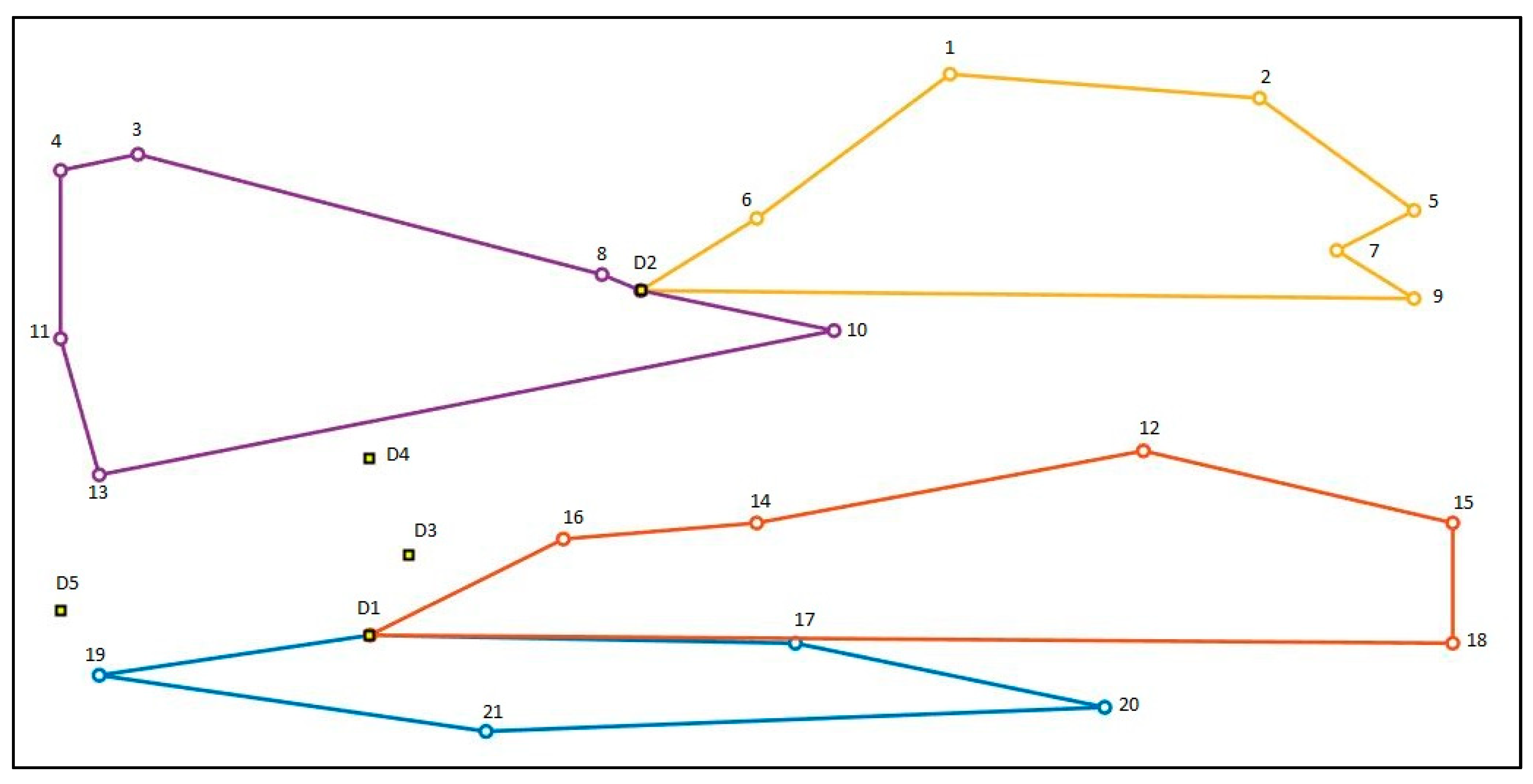
Table 11 present the detailed results of all problem instances produced by the proposed hybrid HS-SA for LIRP. The total cost for each problem instance is highlighted in bold. These tables served as the benchmark for the LIRP. For instance, Gaskell 1 required two depots with a fixed cost of 50 each to serve all the 21 customers with four vehicles (see,
Table 10). In depot 1, with the inventory cost of 573.05, two vehicles are deployed to serve the customers (19→21→20→17) and (18→15→12→14→16) with costs of 59.45 and 86.90 respectively. While in depot 2, with the inventory cost of 577.74, two vehicles are used to serve the customers (9→7→5→2→1→6) and (8→3→4→11→13→10) with costs of 83.01 and 95.55 respectively. In this result, the best solution obtained suggest to close Depot 3–5. The overall minimum cost for Gaskell 1 is 1575.7.
Figure 7 illustrate the topological layout of the Gaskell 1 produced by the proposed hybrid HS-SA for LIRP.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}