In order to realize vehicle-mobile telescopes with larger apertures and satisfy the requirements of road transportation, this paper proposes a robotic SM truss structure, as shown in
Figure 1. In the observation state, the SM is placed at the designated position for observation, as shown in
Figure 1a. When the telescope needs to be transported, a robotic arm will place the SM on the side of the telescope, as shown in
Figure 1b. This truss structure makes it possible to realize larger-aperture vehicle-mobile telescopes.
The optical system is very sensitive to adjustment errors. Taking the Ritchey-Chrétien (RC) system as an example, the distance adjustment between the PM and SM causes defocusing, while off-centering and tilt produce coma. Therefore, it is necessary to conduct an error analysis for the new SM truss mechanism. As the surface error of the SM is negligible, the error introduced by the SM system can be regarded as the misalignment caused by gravity in an ideal optical system, which manifests as displacement at the end of the robotic arm. Therefore, in order to optimize and verify the influence of the new SM truss structure on the optical system, the final error is evaluated only after optimizing the stiffness of the truss structure.
2.1. Optimization Principle
Assuming that the connecting rod of the robot arm is a rigid body, the main reason for the deformation of the robot arm comes from the joints. Each joint can be regarded as a linear spring body. Thus, by connecting the SM to the end of the robot arm, the displacement of the SM can be passed through the robot arm. The displacement at the end is as follows:
where
and
represent the generalized displacement and generalized force, respectively.
is a
flexibility matrix,
and
is the joint stiffness matrix of the robotic arm, defined as
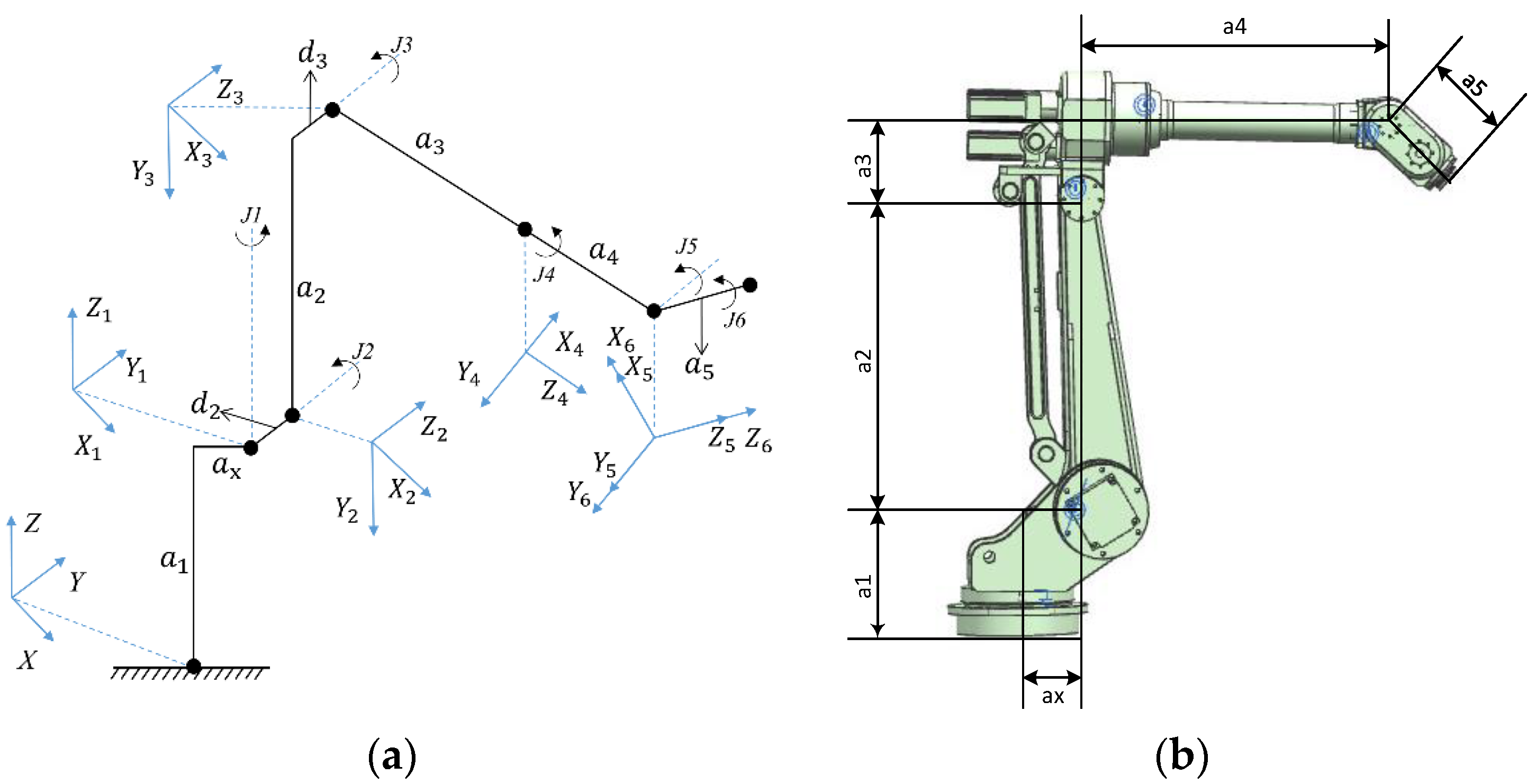
Owing to the constraints of the distance between the PM and SM, we selected the FANUC Robot M-20iA/12L as the research object. The corresponding can be expressed as diagonal matrix , , , , , ) ().
is the Jacobian matrix of the robotic manipulator. We established the coordinate system of each joint for the selected manipulator, as shown in
Figure 2. Then, the Denavit–Hartenberg parameters (DHm) can be obtained, as shown in
Table 1.
Considering the slow motion of the telescope during observation, it can be regarded as a quasi-static process. The acceleration can be ignored, and only the influence of gravity is considered. Therefore, the force at the end of the truss can ignore the influence of the moment on the system, and only the translation needs to be considered. Therefore, the displacement of the SM can be expressed as:
where
represents the force applied to the end of the robotic arm. Under the condition of pitching motion,
is composed of the components of gravity of the SM in different directions at different pitch angles of the telescope system.
indicates the displacement at the end of the robotic arm. The misalignment of the secondary mirror can be calculated and verified using Equation (4).
For a robotic system, the optimization of the posture can be regarded as the maximization of the stiffness coefficient:
Among them,
,
is the 3 × 3 sub-matrix of
:
is affected by
,
, and
, where
and
are values determined after establishing the coordinate system, and
is the angle between
and
. The stiffness coefficient has the invariance of coordinate system transformation, and therefore, the optimization model can be expressed as:
where
is a vector composed of the angles, and
is the pose matrix connected with the SM that contains the elements
.
is the pose matrix formed by the kinematic model that corresponds to the end of the robotic arm.
Before optimizing the stiffness coefficient, the initial pose of the robotics must be solved. First, we determined the position vector
and direction vector
of the end of the robotic arm according to the relative positions of the PM and SM; then, the initial pose of the end of the robotic arm is
where
is an arbitrary unit vector in the plane perpendicular to
, and
is the cross product of
and
.
All the inverse kinematic solutions are solved according to the initial pose of the robot end pose, and the maximum stiffness performance index value is selected to be as the initial joint angle vector.
Then, the inverse kinematic problem (IKP) method based on Jacobian matrix iteration can solve the joint angle of each feasible pose and the maximum stiffness coefficient is selected in the range of
. The solution process is as follows:
- (1)
Initial - (2)
- (3)
, - (4)
- (5)
- (6)
- (7)
If is reachable, go next; Else, go back to (2) - (8)
Output
|
where
represents the positive kinematics solution,
is the real-time position vector of the robotic arm end in the iterative process,
is the rotation matrix representing the real-time posture of the robotic arm end in the iterative process,
represents the end target position vector, and
represents the rotation matrix of the end target pose.
represents a small change in the angle vector, while
represents a small change in the end posture, and is defined as
where
denotes a small change in position,
is a small change in the rotation matrix, and
is the axial vector of
:
2.2. Optimization Results
Because the SM truss is a symmetrical parallel mechanism, the form of the parallel compliance matrix can be written as
where,
,
and
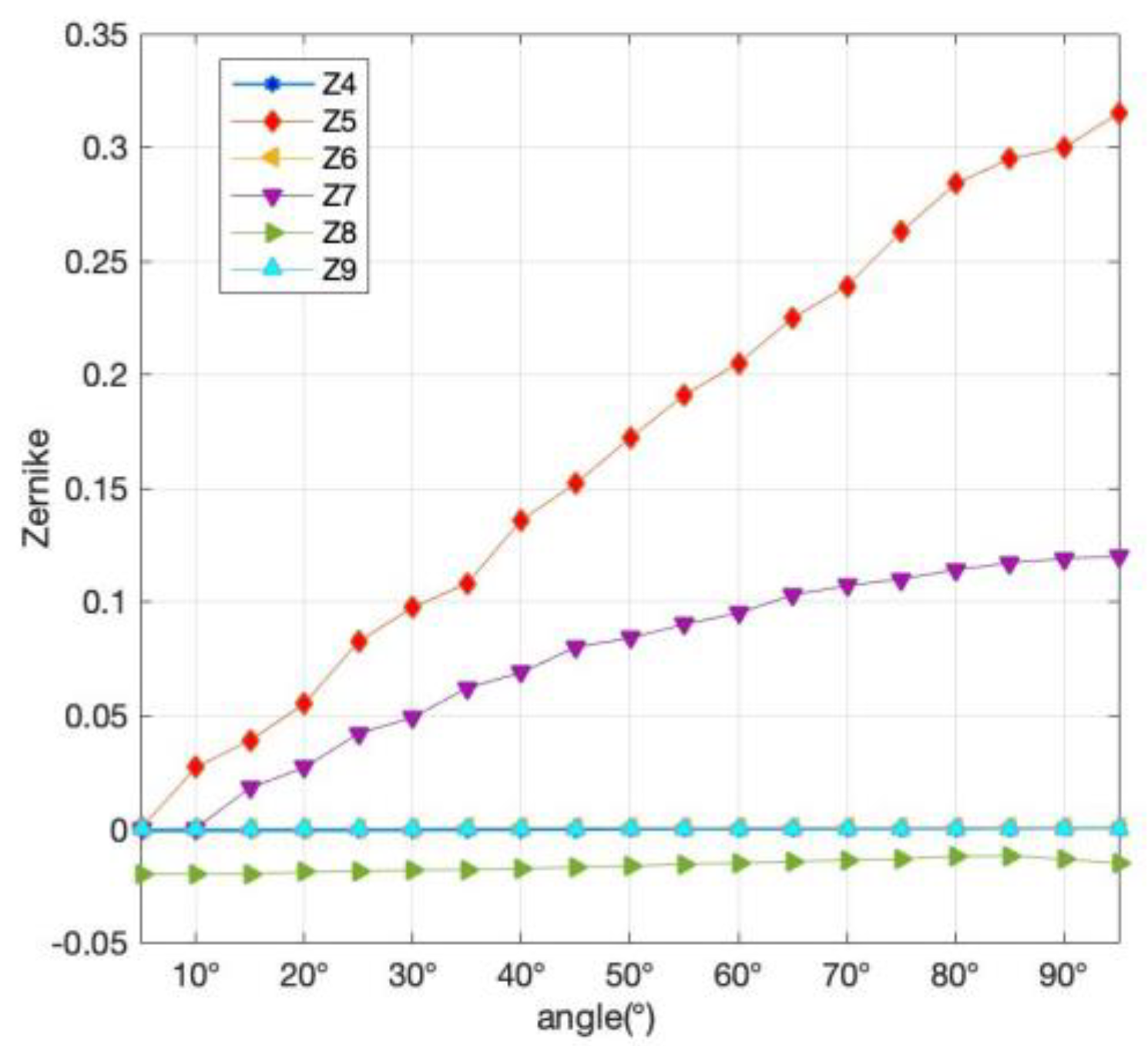
are the flexibility matrices corresponding to the three limbs, respectively. To obtain the optimization of the stiffness coefficient of the manipulator, the calculation results of the parallel compliance matrix are incorporated into Equation (3). The offset components of the SM corresponding to the x-, y-, and z-directions changing with pitch angle in the gravity field are shown in
Figure 3.
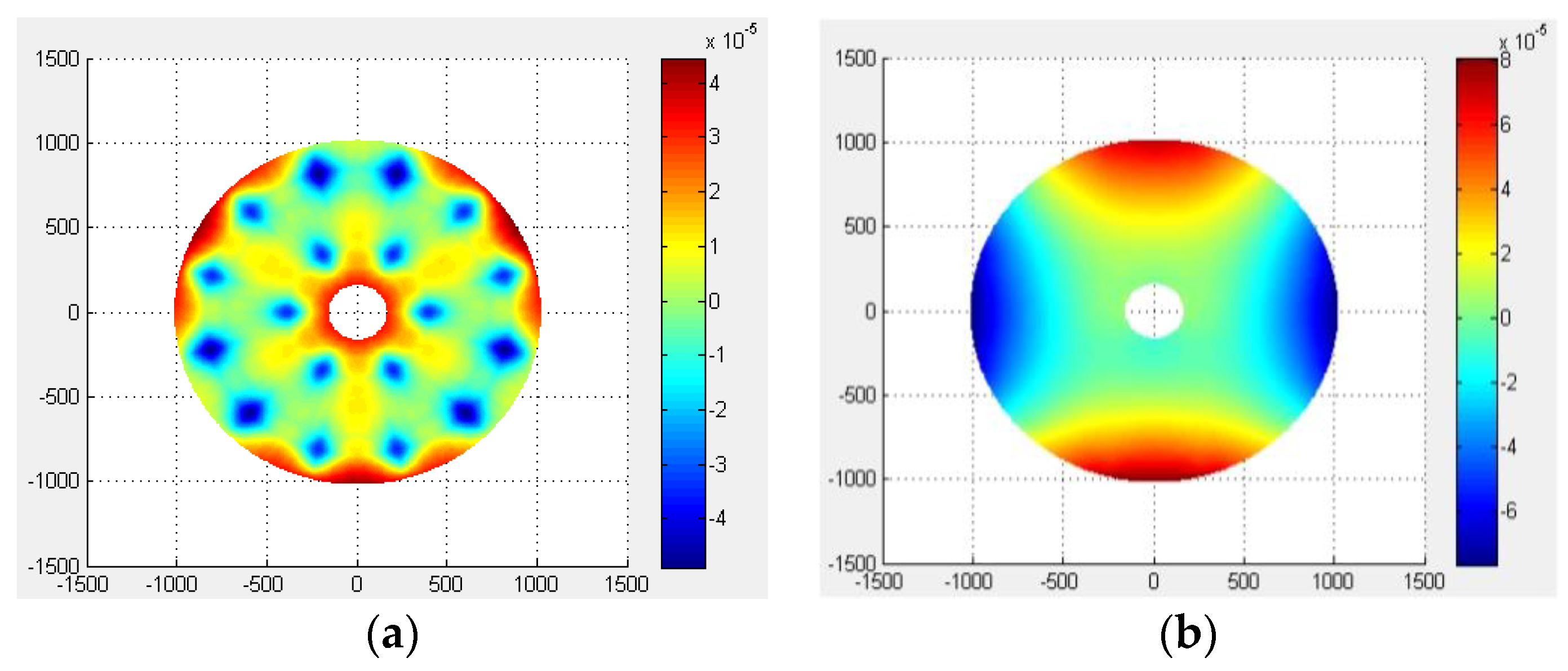
The offsets in the x-, y-, and z-directions are incorporated into the optical system as the offset of the SM, with the wavefront aberration root mean square (RMS) value of the offset system subsequently obtained (see
Table 2).
According to the data in
Table 2, when the optical axis is vertical, the RMS of the aberration caused by gravity is
, and when the optical axis is horizontal, it is
. It can be observed that the wavefront aberration caused by the misalignment of the SM owing to the structural deformation has a greater impact on the optical performance. Furthermore, the aberration introduced by the structural deformation changes in real time with the change in the telescope’s pitch angle. Therefore, in order to improve the optical performance of the system, it is necessary to correct the different misalignments corresponding to the next mirror in different situations.
2.3. Feasibility Analysis of the Robotic Truss Structure
The feasibility of the secondary mirror truss based on robotics must be analyzed before studying the adjustment capability and method of the secondary mirror. The proposed parallel mechanism needs to be able to realize the adjustment function of the secondary mirror.
First, we theoretically analyzed the kinematics of the parallel mechanism. The parallel structure proposed in this paper is a 3-6R mechanism. We established the relationship between the screw theory and geometric algebra and analyzed the kinematics characteristic of the parallel mechanism.
According to the definition of the screw theory and geometric algebra, N-dimensional geometric algebra space can be written as the composition of orthogonal groups
, screw can be seen as a line vector with a pitch, and the equation of the screw is
, written in Plücker coordinates as
. The screw can then be represented by geometric algebra as:
in which
is a scalar. The secondary mirror truss structure can be represented as the model shown in
Figure 4. We established a coordinate system at the center of symmetry. The fixed platform is set in the XOY plane in
Figure 4 and the radius of the fixed platform is r. The moving platform is set on the above.
The moving subspace of the parallel mechanism can be solved after obtaining the moving subspace of each serial. The position vector of each joint is shown in
Table 3.
According to Equation (12), each twist on the first limb can be written as:
The motion subspace of the first limb can be regarded as series of independent kinematic pairs on the limb, then the union of the twists is:
Similarly, the motion subspace of the second limb is the union of the twists:
The motion subspace of the third limb is the union of the twists:
are scalars in the equations that do not influence the result. It can be obtained from the calculation that the motion subspace of each limb at the end of the kinematic chain is a 6-blade. N-dimensional geometric algebra comprises a 0-n order blade and the blade of 0 order is a scalar. Then, it is easy to obtain the following equation:
can be calculated by Equations (14)–(16), and m is a scalar that does not influence the result. It can be seen from the calculation that the parallel mechanism of the 3-6R structure has a 6 degrees of freedom adjustment function. Thus, the mechanism meets the requirement of secondary mirror adjustment.
Second, we have built the model of the robotics in Matlab. The Denavit–Hartenberg parameters of the FANUC Robot M-20iA/12L selected in the paper were written into the program, and the parameters were normalized to analyze the workspace of the robot truss structure.
Through the Monte Carlo method, we sampled each manipulator 10,000 times within the motion range of each axis to generate the workspace shown in
Figure 5.
The following conclusions can be drawn according to the generated workspace:
Finally, the values of the 18 joints on the robotic arms have been solved by inverse kinematics according to the displacement of the secondary mirror. The given displacement is the maximum secondary mirror adjustment set in the text. A definite solution can be obtained which proves that the parallel mechanism used in this paper can achieve cooperative work and complete the requirements of secondary mirror adjustment. The joint movements of the three robotic arms are shown in
Figure 6.
According to the calculation results above, the robotic truss can realize the function of switching from the transportation state to the working state. The adjustment function of the secondary mirror can be realized by the parallel mechanism as well.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}