1. Introduction
Corridor is an indispensable requirement to build linear installations such as pipelines, electric transmission lines, communications ways, etc. [
1,
2]. The corridor planning process must consider legal, social, political, environmental, and economic factors interfering and making the corridor design complex [
3]. However, proper corridor planning involves identifying alternative routes and selecting the best one based on design specifications, environmental laws, and good practices [
4]. The corridor planning problem is generally addressed by one or more selection criteria such as distance, environmental impact, and safety, and it is modeled as an optimization problem subject to several topographical constraints [
2,
5].
According to [
6], locating an optimal corridor is analogous to identifying the shortest or least expensive path between two points. Traditional approaches generate a set of alternative routes using enumerative methods with penalty techniques or by specifying one or multiple intermediate points where the path must pass [
7,
8,
9]. The running time of these methods tends to grow exponentially, depending on the size of the geographical study area. In addition, the generation of near-optimal alternative routes in reasonable times using exact methods is hard since they find only one solution in their searching process [
10].
Nowadays, the creation of new corridors to provide different services through linear facilities is growing for the emergence and expansion of urban areas. However, their construction can be delayed due to poor planning, so generating alternative routes for evaluating and comparing candidate solutions is crucial in the corridor planning process. The problem of making alternative routes has led researchers to develop diverse solution methods using different problem representations and applying several deterministic shortest-path-search algorithms such as the Dijkstra algorithm [
11] and its variants. However, generating alternative routes requires exploring the geographical study area, and exact methods only get one route at a time. Thus, an efficient method must include mechanisms allowing the examination of alternative routes spatially dispersed, in reasonable computing time. On the other hand, non-deterministic approaches such as swarm and evolutionary algorithms, and the simulated annealing can find near-optimal solutions in a reasonable time due to their exploration and exploitation skills.
This paper presents a simulated-annealing-based optimization method applying a variable-neighborhood structure to generate and evaluate alternative corridor routes and select the best one. The proposed algorithm starts its search process with a feasible solution obtained by a greedy uninformed search strategy, the breadth-first-search (BFS) algorithm, which does not use some cost function for exploring possible routes, and not necessarily find the optimal global path. Then, the variable neighborhood mechanism randomly selects two points in the corridor for exploring alternative routes through prohibited and guided movements. The results obtained with the simulated annealing method are compared with the BFS algorithm, to show the effectiveness in improving the solutions obtained by the proposed algorithm. The experimental analysis compares the variable-neighborhood mechanism on three real problem scenarios. It suggests that the proposed mechanism explores and improves the initial solution. Likewise, the neighborhood structure permits creating and evaluating alternative corridor routes and selecting the best one, based on the objective value. Improvements are reported above 18% on the greedy algorithm in the solution quality.
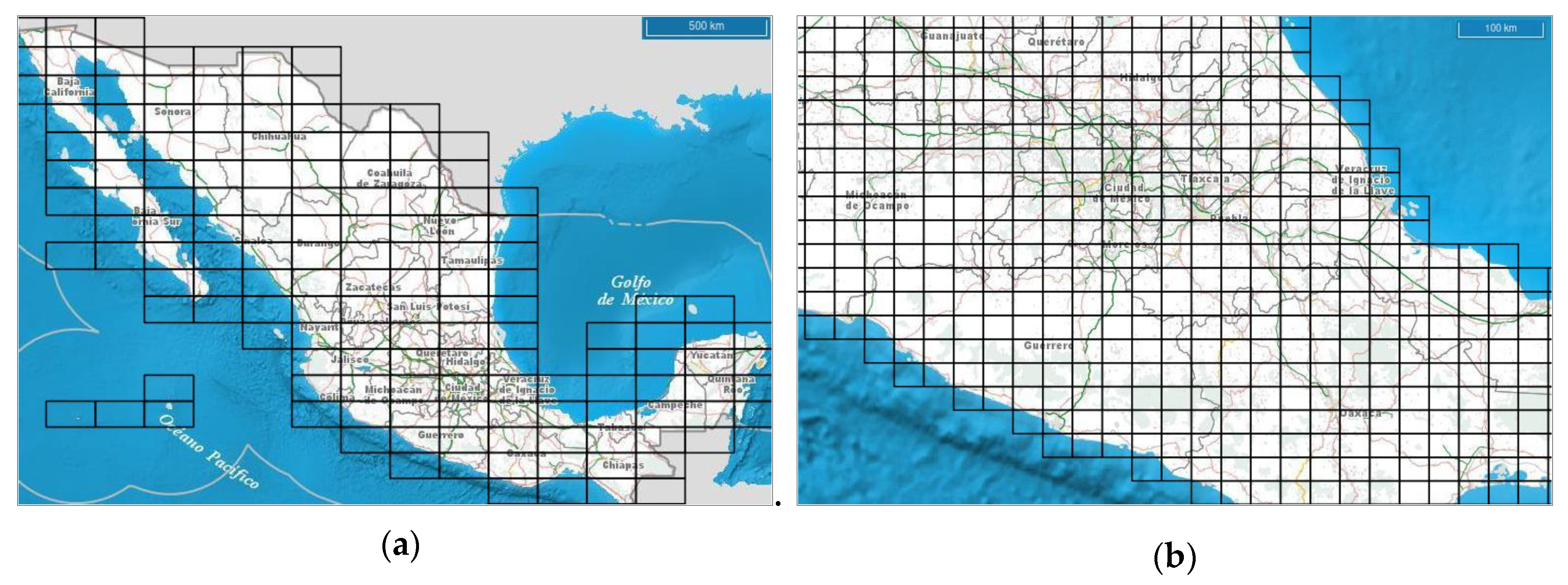
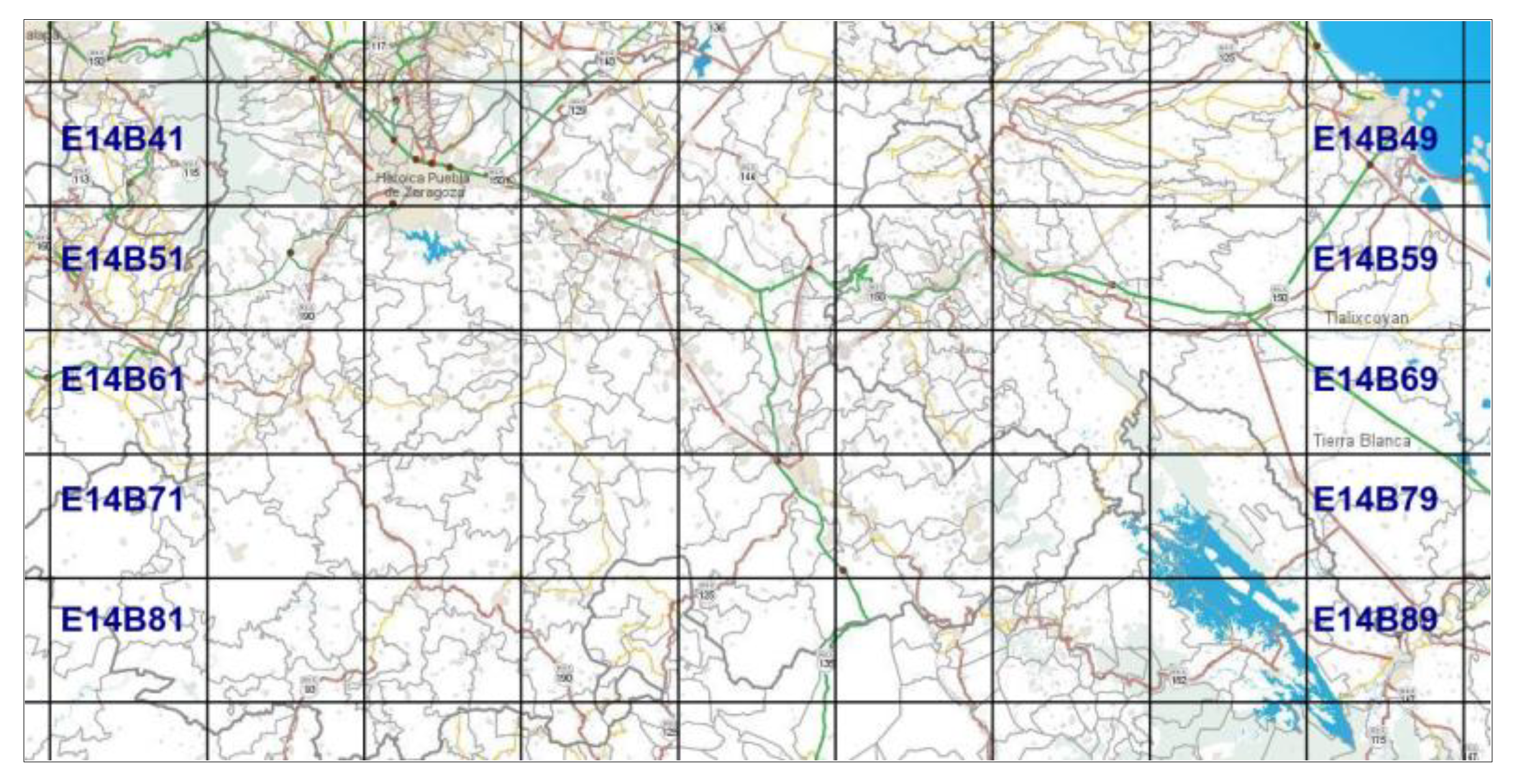
The main contribution of this work is the implementation of a variable-search mechanism generating alternative routes inside a corridor. The proposed algorithm dynamically selects the best route considering topographic information collected from three Mexican regions located in the Veracruz Basin. It is a prominent oil and gas extraction area of excellent quality where several production fields are currently located.
The rest of the document is structured as follows:
Section 2 describes the corridor planning problem and the optimization model of the shortest route.
Section 3 depicts the simulated annealing algorithm elements: The initial solution creation procedure and the details of the variable-neighborhood structure.
Section 4 provides details of the test scenarios, and the experimental results obtained with the SA algorithm. Finally,
Section 5 shows the conclusions and future work.
3. Simulated Annealing Approach for the Corridor Planning Problem
The shortest and least expensive routes between two geographical locations can be obtained applying exact methods, and a GIS facilitates their computation, as well as the spatial analysis and the management of geographic information by using robust data models [
39,
40,
41]. Since a GIS commonly uses Dijkstra-based algorithms, the corridor width is not considered in their calculations, and alternative routes to the best one cannot be obtained [
42]. The corridor width can be conceptualized in different ways based on the map scale, but one additional mechanism is needed to generate more than one route. In this case, heuristics are applied to reach near-optimal solutions in a reasonable time, since they are reliable and straightforward strategies for solving complex problems.
The simulated annealing (SA) algorithm is a heuristic technique finding near-optimal solutions for combinatorial problems with large solution spaces [
43]. SA is based on a thermal treatment for solids, named annealing, where one material is exposed to high temperatures to the melting point and is cooled gradually to a cooling point. Annealing allows the molecules to organize themselves to reach minimal potential energy, thereby achieving higher resistance. The SA algorithm is used to solve complex optimization problems such as the traveling salesman problem [
44], the automatic design of integrated circuits, and the noise suppression in digital images [
45], as well as in image compression [
46], among other problems. SA implements an iterative local search guided through a stochastic process with a given probability [
47]. First, SA starts with an initial candidate solution
s, and a high-temperature
T. With an iterative structure, SA disturbs
s until
T reaches a value less than the stop criterion. During this process, in each iteration, a new candidate solution
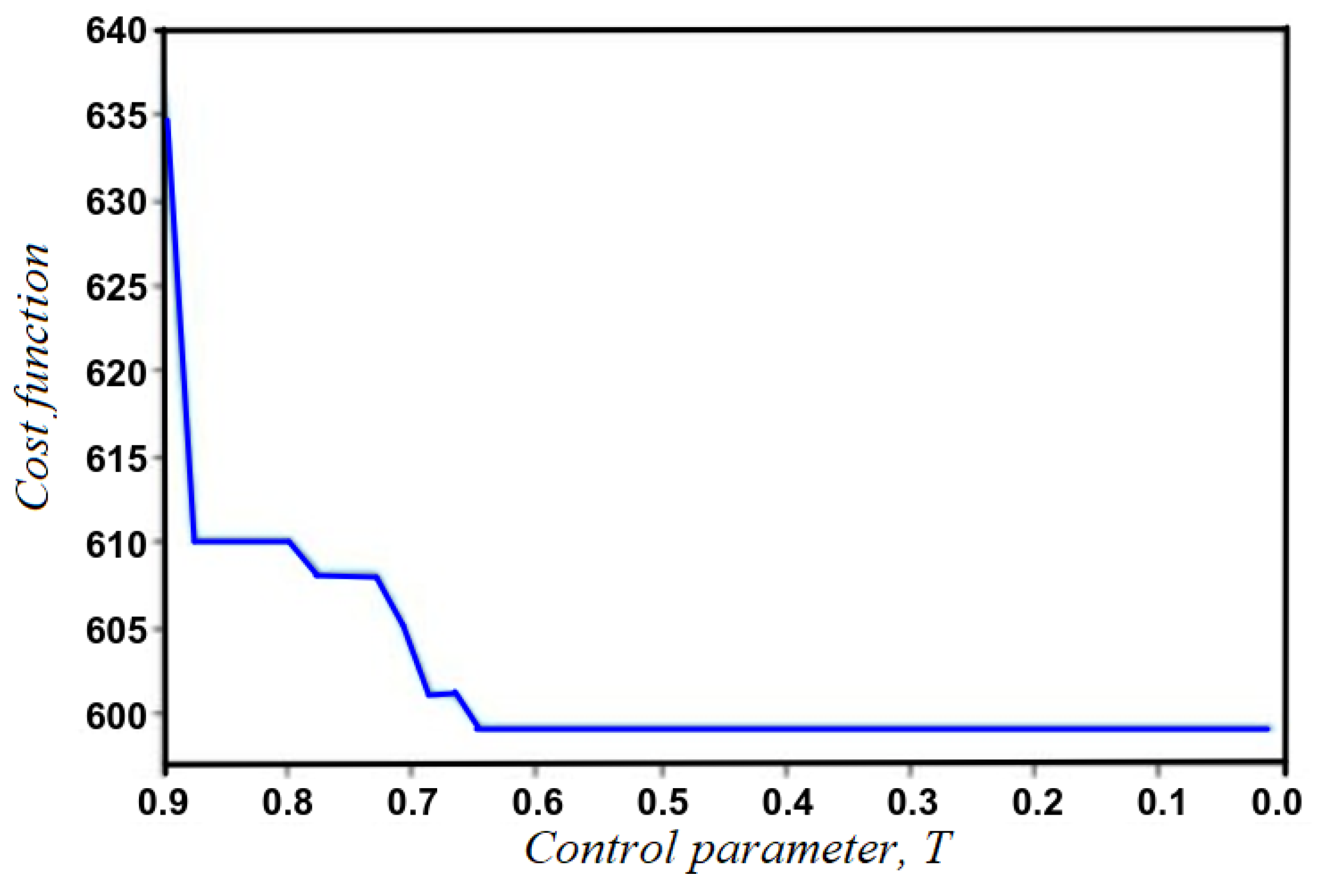
s’ is selected from the neighborhood of the current solution. These solutions are compared, and the best one is chosen as the new current solution. In some cases, a not improved solution is accepted to escape a local optimum and to continue searching for better solutions. The probability of taking not improved solutions depends on the
T parameter, which decreases in each algorithm iteration using a control coefficient
β. Since
T starts with a high value, random changes are allowed. However, as the temperature is lowered slowly, the number of accepted changes decreases until the procedure reaches a stationary state. SA adopts different stochastic methods to determine the acceptance probability of a new solution but commonly uses the algorithm proposed by [
48], where the energy change in a cooling process of a physical system is simulated. Thermodynamics laws state that at a temperature
T, the probability of energy rise of magnitude ∆
E is determined by the expression
P(∆
E) =
e−∆E/kT, where
k is the Boltzmann constant.
It is clear that when SA perturbs only one solution in each stage of its iterative process, it promotes the solution space exploitation. Furthermore, by the use of its acceptance criteria, the solution space exploration is encouraged. Although other heuristics, such as swarm and evolutionary algorithms, have demonstrated to reach near-optimal solutions for diverse optimization problems, they consume more computational resources than that used by SA. These algorithms disturb a set of candidate solutions in each step of their iterative process, and this implies the evaluation of several solutions, unlike SA, evaluating only one candidate solution.
The SA algorithm applied in this paper to locate corridors explores alternative routes between the origin and destination node on each iteration, until the best one is found. The objective function considers both the minimum distance and the feasibility costs of passing on the study region. For improving the search procedure, diverse neighborhood structures are used, allowing found approximate solutions, adjusted to the complexity and nature of the problem [
49]. Algorithm 1, shows the procedure to locate a near-optimal corridor. In this algorithm,
si is the initial solution,
m is the counter increasing until reaching the Markov chain length (
Lmarkov) defining the Metropolis cycle.
Ptam is the size of a partial route where a random segment is altered, and
sopt is the optimal solution found by the algorithm.
T0 is the control parameter in SA,
Tf is the stopping criterion, and
β is the control coefficient.
| Algorithm 1. The SA algorithm to solve the corridor planning problem. |
| | Data: corridor, ptam, T0, Tf, Lmarkov, β |
| | Result:sopt |
| 1 | do |
| 2 | si ← random solution |
| 3 | while si not in corridor |
| 4 | s ← si |
| 5 | while T0 ≤ Tf do |
| 6 | for m ← {1, …, Lmarkov} do |
| 7 | do |
| 8 | s’ ← perturbation(s, ptam) |
| 9 | ptam ← modify(ptam) |
| 10 | while s’ not in corridor |
| 11 | ΔE ← f(s’)–f(s) |
| 12 | if ΔE < 0 then |
| 13 | s ← s’ |
| 14 | else |
| 15 | P(∆E) ← e−∆E/kT |
| 16 | α ← Randomly selected value in (0,1] |
| 17 | if α ≤ P(∆E) then |
| 18 | s ← s’ |
| 19 | endif |
| 20 | endif |
| 21 | end for |
| 22 | T0 ← βT0 |
| 23 | end while |
| 24 | sopt ← s |
In this algorithm, lines 1–3 point out that a randomly created solution is accepted as the initial solution if it is inside the corridor. The SA external cycle is shown in lines 5–23. In particular, lines 6–21 represent the Metropolis cycle: First, lines 7–10 describe the creation of an alternative solution, in which all nodes must be inside the corridor. If a segment of the path has some node outside the corridor, it is modified with the variable Ptam (lines 8–9), until the entire route is within the corridor. Then, line 11 computes the difference in energy cost. Finally, the acceptance criteria is shown in lines 12–20. Line 22 indicates the updated criterion for the temperature control parameter. At the end of the external cycle, the best solution is returned as the algorithm solution.
SA can distribute optimized routes along the corridor, which is only possible with other algorithms if they modify their search procedure. The SA algorithm can generate alternate routes close to the shortest one in the corridor with optimized costs when solving the optimization model presented in relations (1)–(5). Since the SA algorithm generates local optimal solutions, it can find one or more optimal global solutions, where some can be the same found by deterministic procedures such as the Dijkstra procedure, since the problem may have more than one global optimal solution. The SA-based algorithm proposed in this work seeks the optimal global route and finds a variety of optimized local optimal routes meeting the restriction of being inside the corridor. The use of SA is a simpler alternative to find optimized routes within a corridor, independently of the shortest route, which gives a choice of alternative optimized routes for a pipeline installation if the shorter one is challenging to use in the corridor for various unforeseen reasons.
The corridor planning problem solved in this work is encoded in a rectangular mesh of
n rows and
m columns, where each node connects with eight neighboring nodes with constant distance. The search space is determined based on the number of nodes in the network,
z =
n x m, such as it is 8
z [
50]. However, the mesh contour conditions should be considered to determine the total number of feasible routes connecting the origin and destination nodes. If reverse walks are restricted, the search domain is reduced to 8 × 7
z [
51].
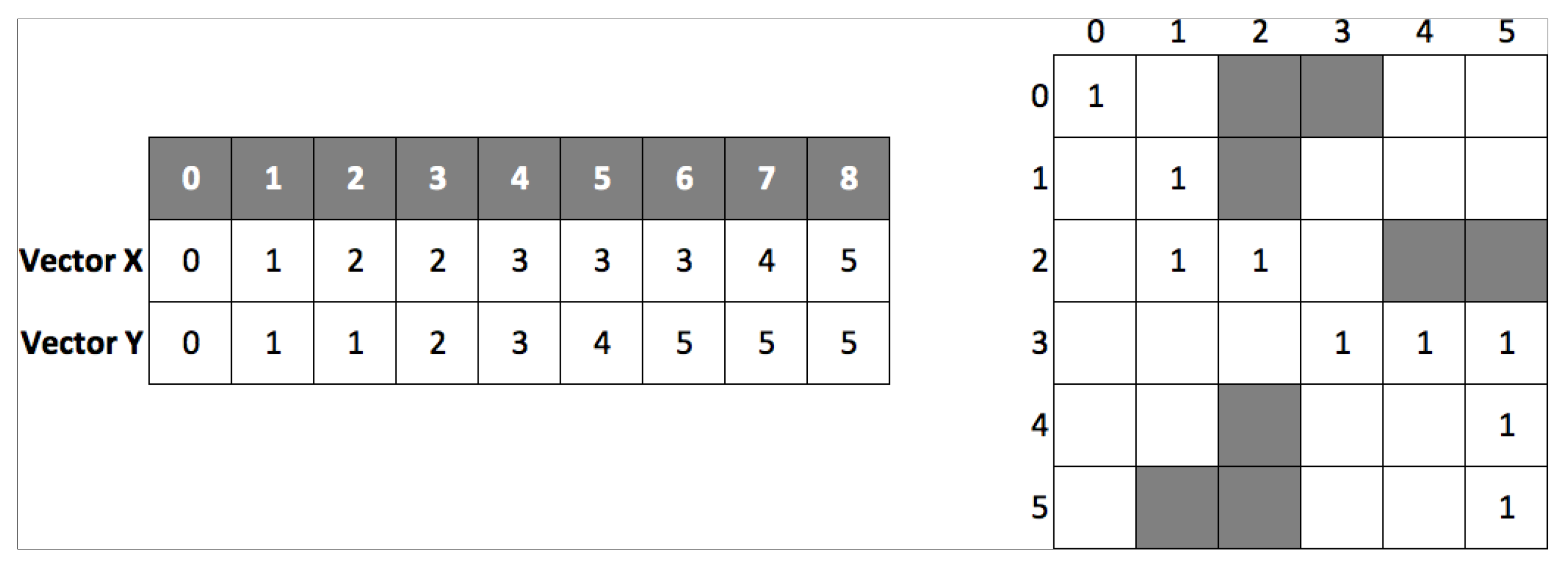
The initial solution used by the SA algorithm is created using the cumulative penalty costs matrix, where indices correspond with the point coordinates. The rectangular mesh is generated using the universal transversal Mercator (UTM) system. A greedy uninformed search procedure is used to create the initial solution encoded by two integer-valued vectors containing the coordinates of the nodes being part of the route.
Figure 1 shows a candidate solution representing a path between (0,0) and (5,5) points.
The mechanism to find neighboring solutions builds pseudo-random paths between two points selected at random in the current solution. The search for alternatives routes uses a matrix of visited nodes to avoid using those that have been part of previous solutions. This procedure applies the following steps:
Randomly select a point r1 from s.
Randomly select a second point r2 from s. The distance between r1 and r2 cannot exceed a maximum distance previously defined.
Copy the points of s in locations 0 to r1 − 1 in s’.
Generate a pseudo-random path in s’ between nodes r1 and r2, through an informed search, giving priority to the least visited cells.
Update the values of the cells that have been visited in the path pseudo-random between nodes r1 and r2.
Copy the second part of s from locations r2 + 1 up to n − 1 in s’.
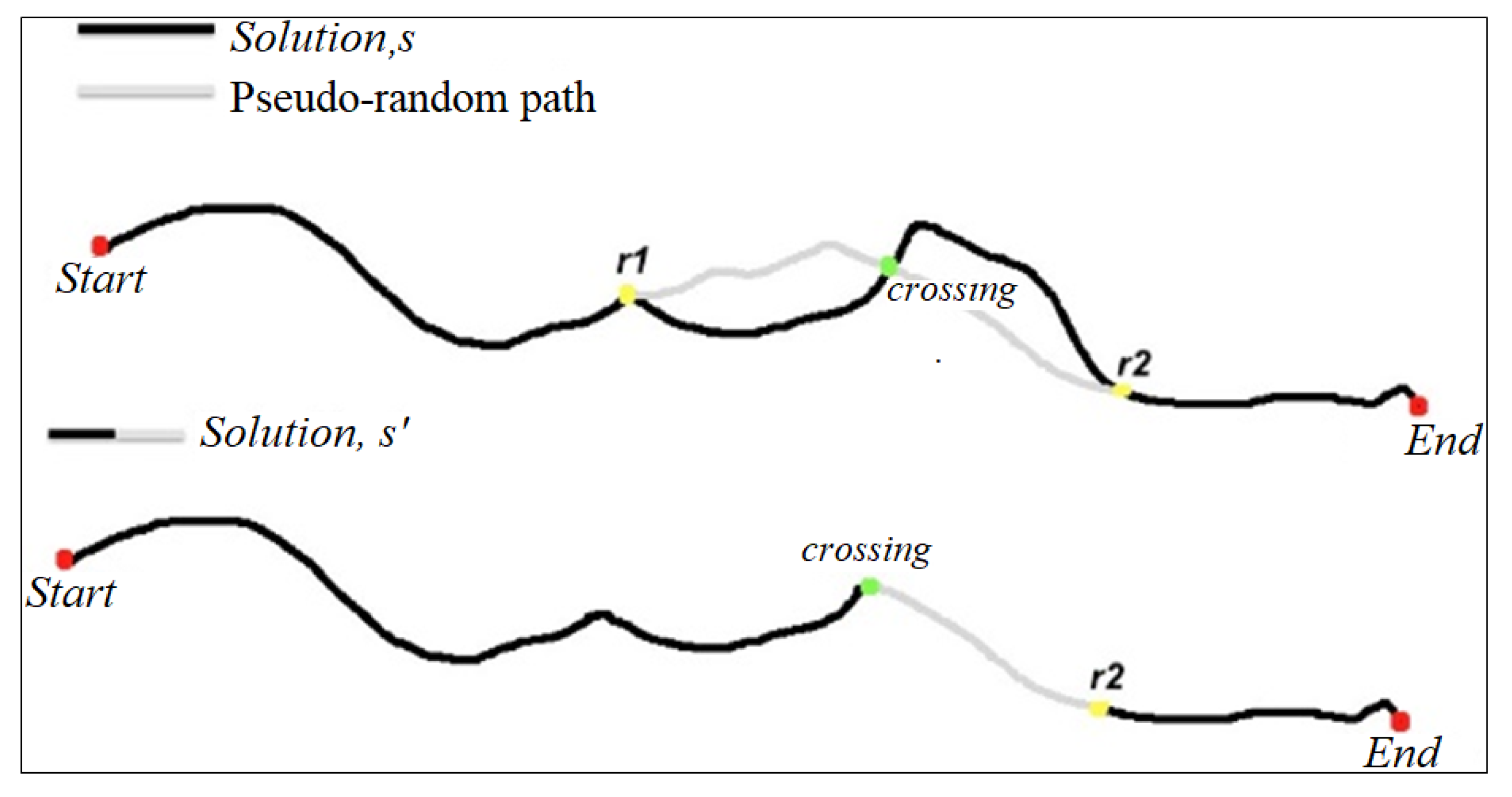
Two conditions must be considered to avoid repeated movements, considered as tabu movements in the
pseudo-random paths. The first one verifies if a common point exists between
s and the generated
pseudo-random path. If this point exists,
s’ is created by merging
s with the pseudo-random path using this common point (
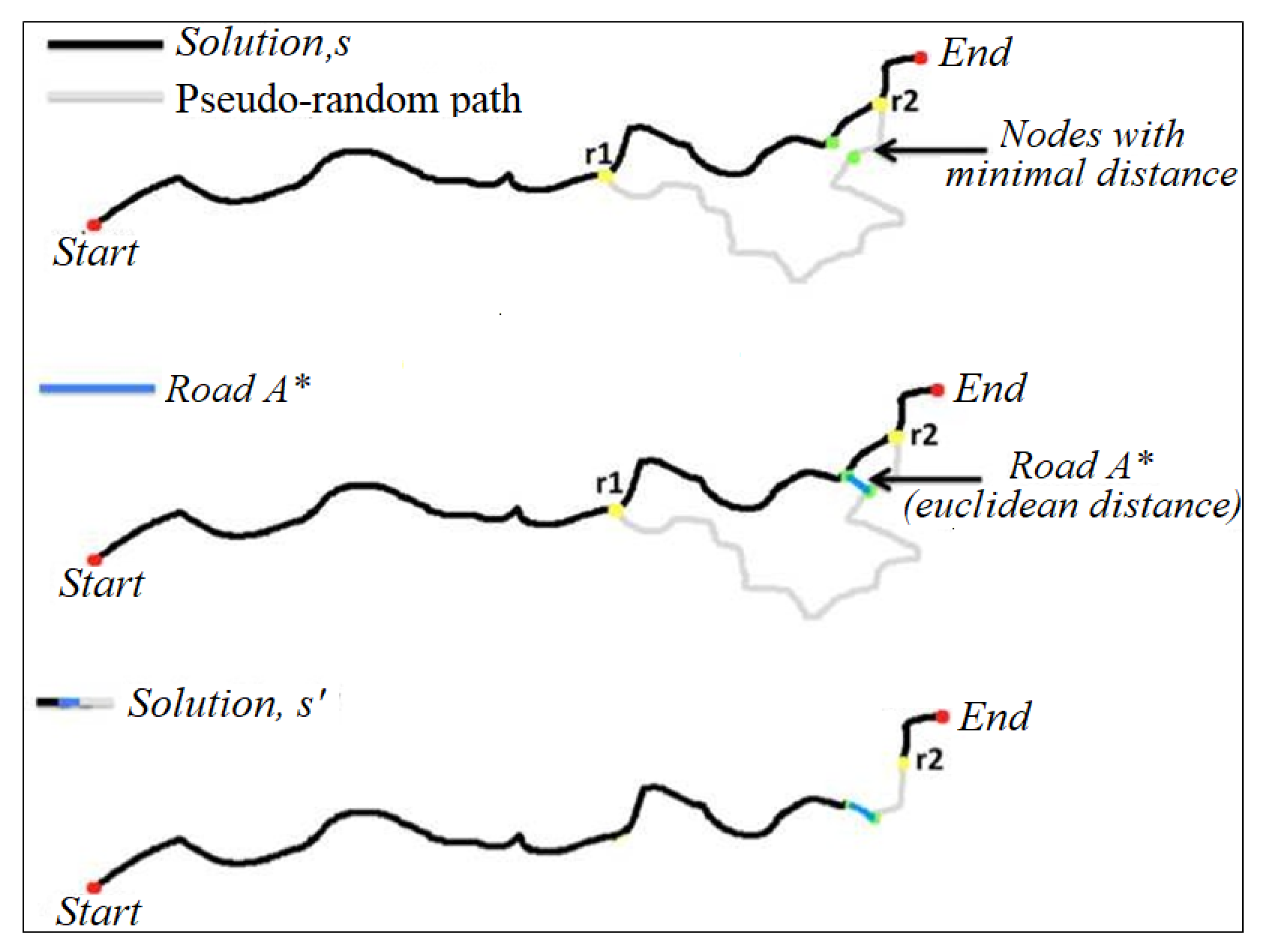
Figure 2). The second condition is applied if the paths are not sharing a common point. To merge the two nodes closest to the r
2 point having the least distance between them are searched for to be connected through the A* heuristic [
52] (
Figure 3).
The matrix of visited nodes (
u,
v) allows extending the exploration to refine the initial trajectory through the physical restrictions existing during the search.
Figure 4, shows this matrix, as well as the current solution and the
pseudo-random path generated between points
r1 and
r2 in green and cyan colors, respectively.
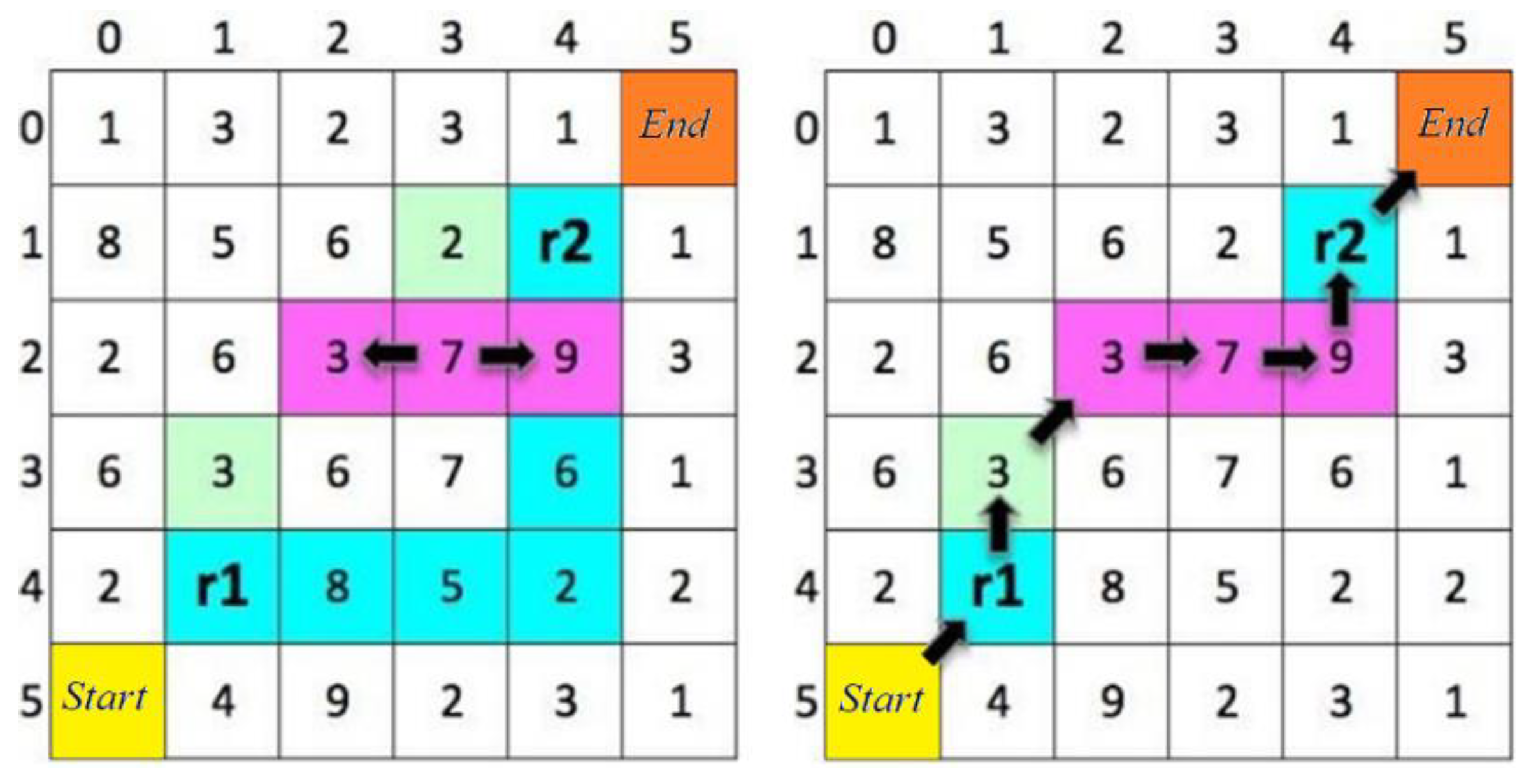
Since these paths are not sharing a common point, the second criterion is applied to create an alternative solution. First, the nearest points to
r2 are identified, and a path between them is generated using the A* algorithm.
Figure 5 shows the resulting alternative solution
s’, where (2,2) in the current solution and (2,4) in the pseudo-random path are the nearest points to
r2.
Figure 6 shows an example of a corridor in green color with limits in purple color. The shortest route P is shown in red color and the route P1 obtained by the SA algorithm is shown in blue color. This route is feasible since it is contained in the corridor, complying with the mathematical model’s constraint (4). The route P2 (in orange color) is infeasible since part of it is outside the corridor, and the perturbation solution (s, ptam) function is used to repair it.
Once the stop condition of the algorithm is reached, the best solution’s values are mapped to the UTM coordinates, and the corridor is displayed on the map using a GIS tool.
5. Conclusions and Future Work
The corridor planning problem can be addressed as an optimization problem with topological restrictions. This paper presents the SA algorithm’s implementation using a variable neighborhood mechanism to generate different alternative routes and select the best one for this problem. By using a guided pseudo-random search approach, the variable neighborhood structure explores alternative routes improving the initial solution.
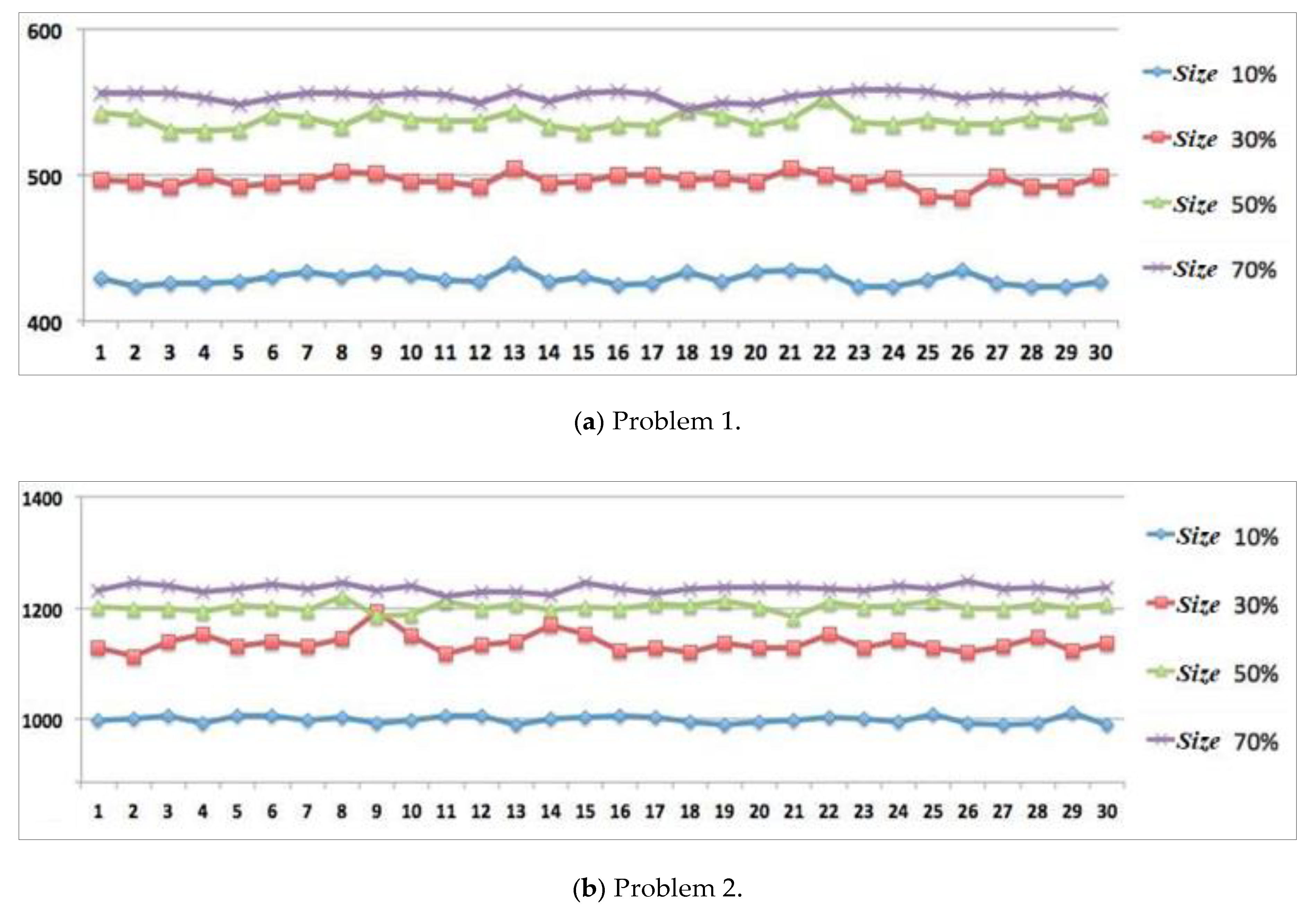
The experimental results demonstrate that implementing the proposed mechanism in SA generates alternative routes with quality and diversity. Likewise, the results obtained by the SA algorithm significantly exceeds 18% over those gotten by the greedy method, this only indicates for comparative purposes that SA obtains optimized routes, but it is not verified that SA gets the best solution. Moreover, the implementation of the proposed neighborhood mechanism outweighs the greedy algorithm in solving large-size problems. Applying a variable neighborhood mechanism in SA allows generating diversity in routes, which is important if it is necessary to choose other alternative paths that respect a corridor’s limits. With the results obtained in this work, the objective of finding routes with quality and diversity is met. The SA algorithm solves three practical problems using real topographic data. However, it can be used in a variety of problems finding the shortest route between two points on realistic scenarios.
Future work can be proposed to develop a method fitting the curves of the impact zone (strip) of the corridor to narrow the search. In this way, it is allowed to explore different alternate routes relatively close to the initial solution without getting too far away. For improving the computation time used to generate an initial solution, it is proposed to implement the techniques used in the MOGADOR method and look for other random mechanisms generating a feasible initial solution in the shortest possible time. The problem needs to be addressed as a multi-objective optimization problem. In addition, it is possible to parallelize the method by its vector nature and the optimization algorithm.
Something very important for future work is to work on problems by dynamically varying the values of the layers so that the costs of the links change depending on the set of selected links, adapting a greedy uninformed search strategy, the breadth-first-search (BFS) algorithm with the same neighborhood structure procedures used in this work to find multiple solutions and focus on finding multiple global optimal paths.
Finally, many real problems have GIS information in different formats and scales that could make the spatial analysis complicated. However, it is possible to convert the different data models to a raster format, adapt the different scales to perform complex spatial analysis, and exploit the geographic information available in diverse private and public sources.

 ,
, 















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}