Gesture Recognition Based on 3D Human Pose Estimation and Body Part Segmentation for RGB Data Input





Abstract
1. Introduction
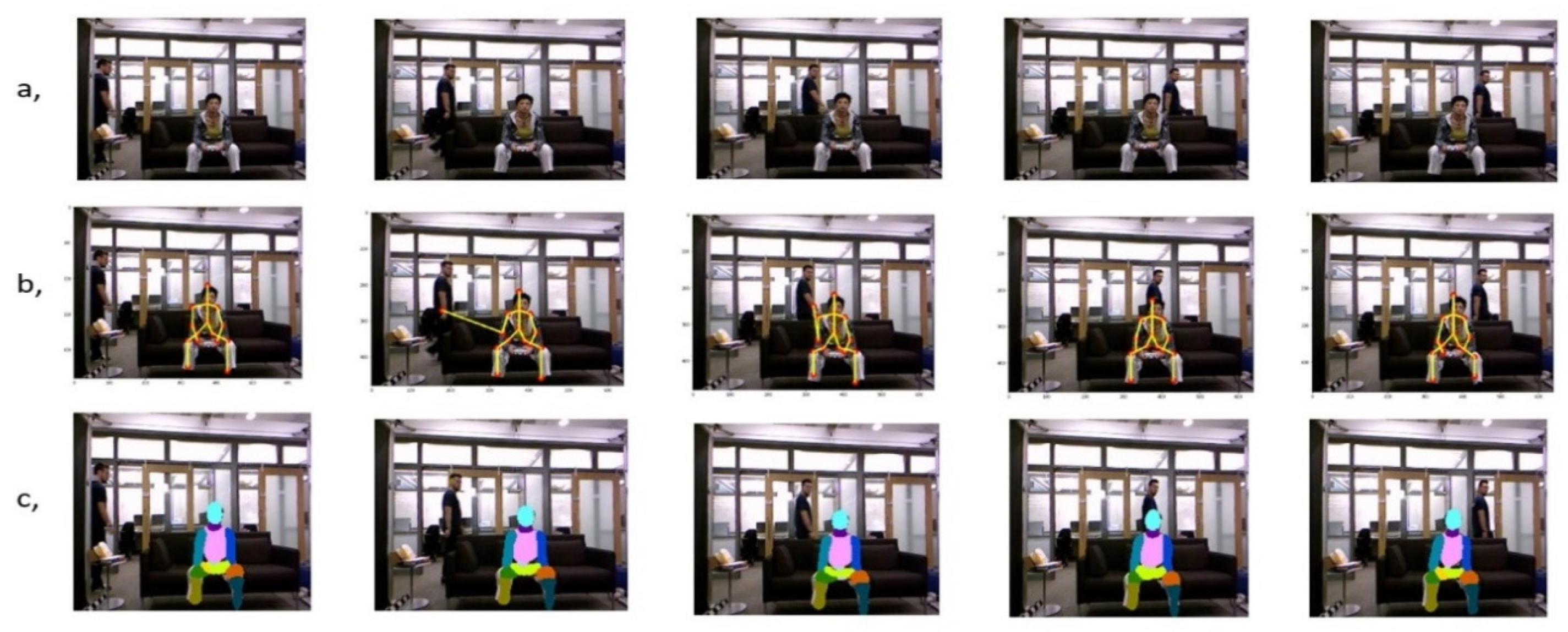
- The reason for the distraction of skeleton joints extraction has been addressed, which hinders from the proper functioning of gesture recognition methods. In other words, the existence of noise or extra persons in the background can cause such distractions.
- The solution to the problem of multiple actors in the scene, which caused the distraction of skeleton joints extraction, has been presented with target person extraction. The target person is segmented, and used for eliminating distraction in skeleton joints extraction.
2. Related Works
3. Proposed Method
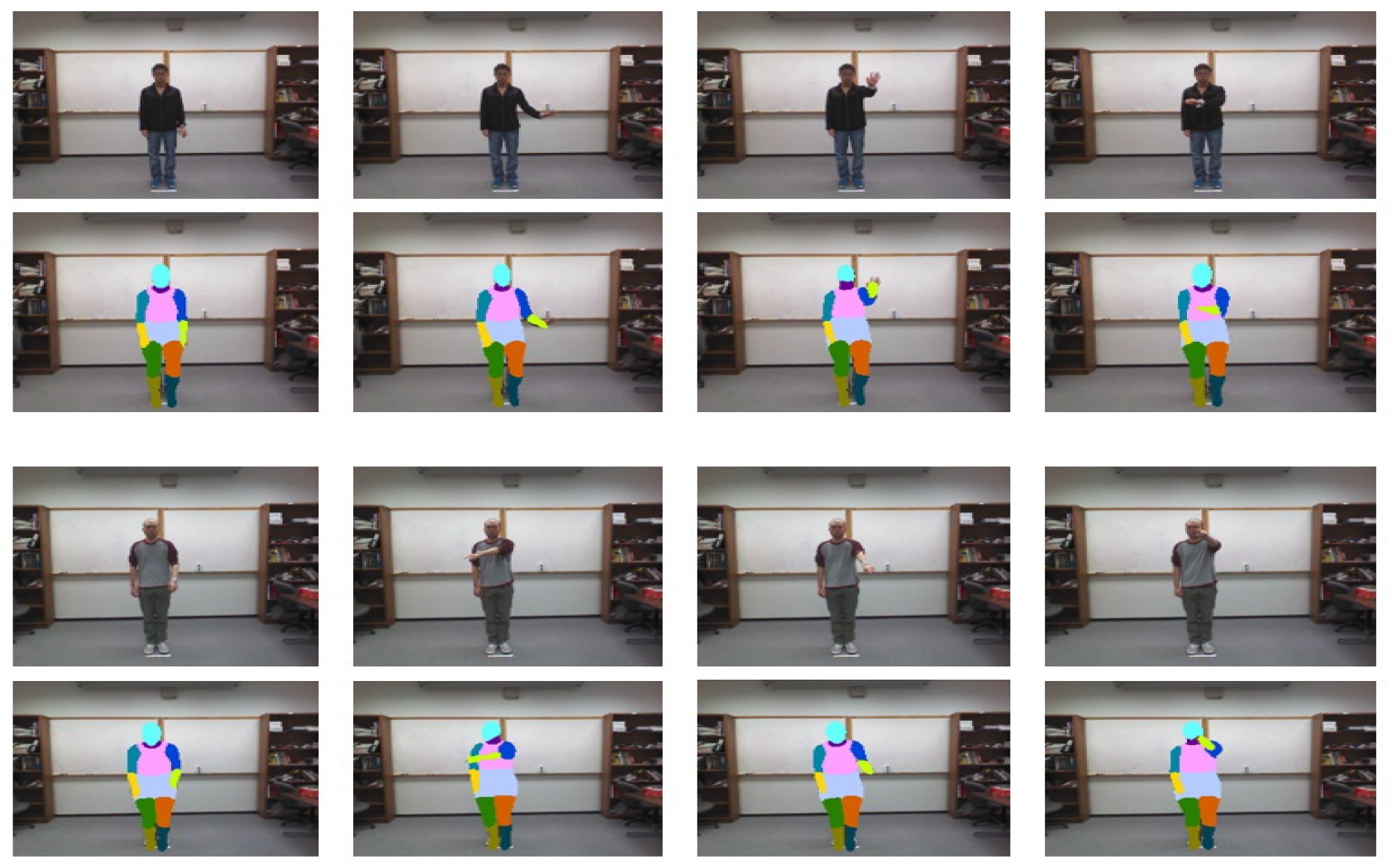
- Color body part segmentation: The RefineNet model, given the RGB input frames, produced the color-coded 12 body parts segmentation. The RefineNet is a multi-path refinement network for semantic segmentation via multi-level features and potentially long-range connections. The RefineNet model typically consists of four blocks: adaptive convolution, multi-resolution fusion, chained residual pooling, and output convolution. The batch-normalization layers were simplified from the convolution block but it still contained the remaining convolution units of the original ResNet. Multi-resolution fusion performed feature map fusion by convolutions and a summation. Multiple resolution feature maps extracted from varied input paths were fused into a high-resolution feature map. Additionally, the output feature map was fused through multiple pooling blocks of chained residual pooling blocks. The final prediction was given by the output convolution block, which had another remaining convolution unit and soft-max layer. The RefineNet network was based on ResNeXt-101 [23] with trained weights by the UP-3D dataset [24] for color-coded 12 body parts segmentation. Figure 4 shows the example of color body parts segmentation on sampled frames on a video.
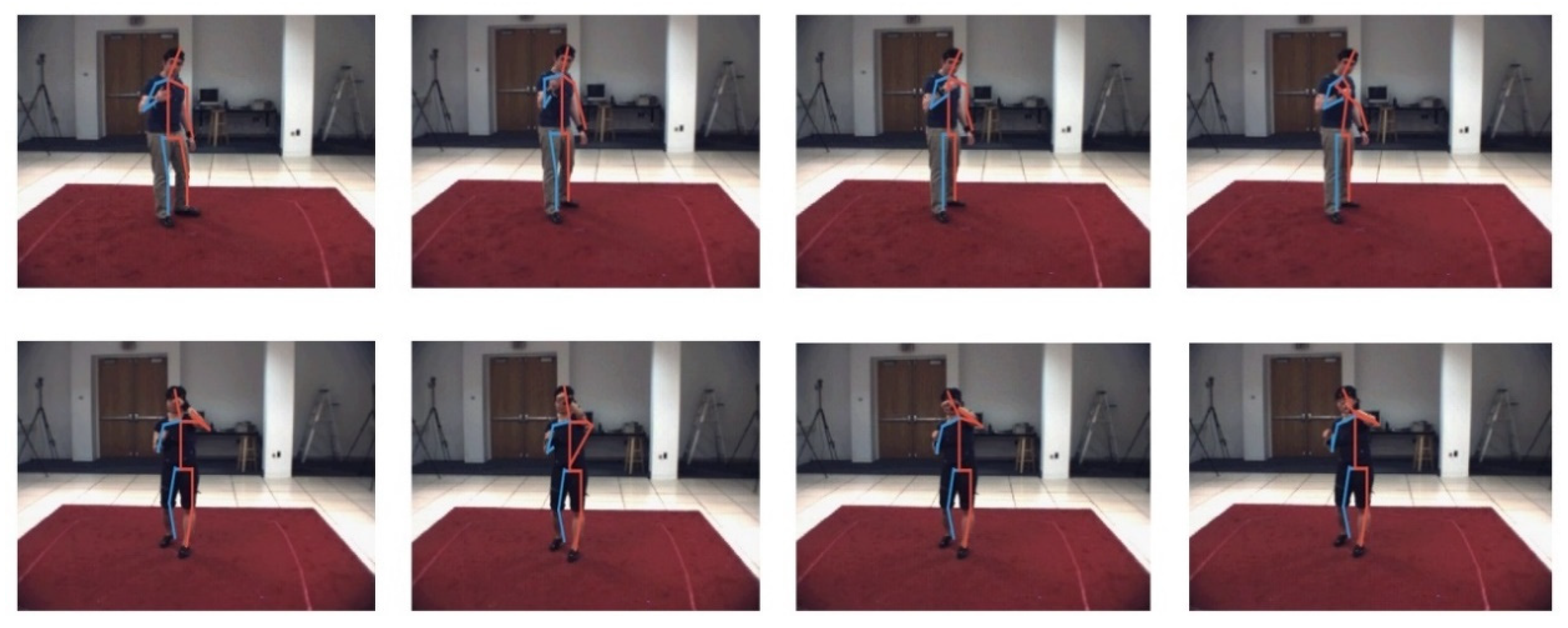
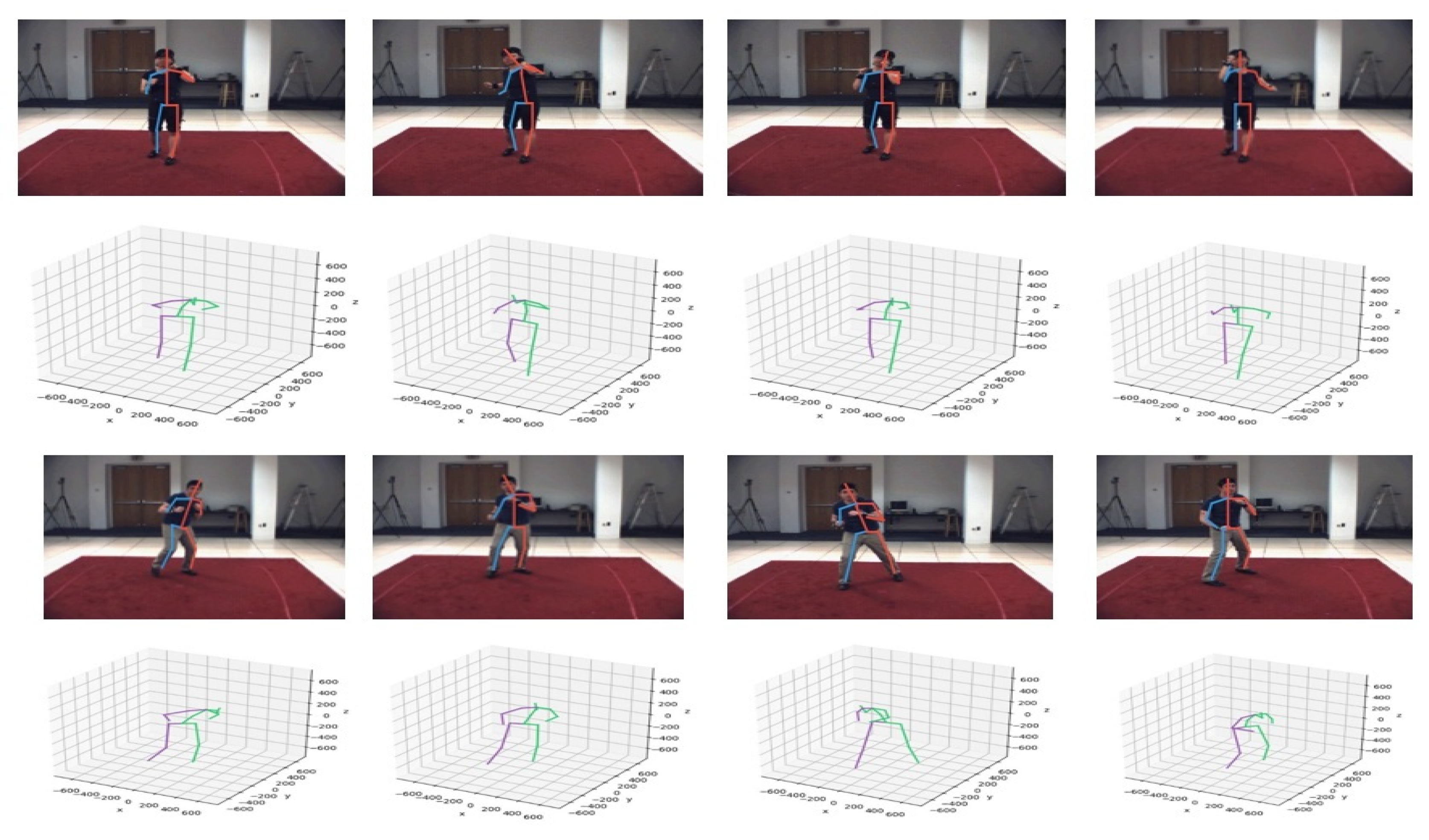
- Temporal video 3D human pose estimation: We extracted 3D joints skeleton information for gesture recognition from temporal video 3D human pose estimation called Pose_3D [14] from background subtracted RGB images. The Pose_3D network is a sequence-to-sequence network that predicts a sequence of temporally consistent 3D human pose from the sequence of 2D human poses. The 2D human pose was obtained by the state-of-art 2D human pose estimation framework—the stacked-hourglass network [25] trained on the Human3.6M dataset [26]. The decoder of the Pose_3D consists of LSTM units and residual connection to predict temporally consistent 3D poses of the current frame using the 3D poses of previous frames and 2D joints information of all frames, which were taken from the final state of the encoder. The temporal smoothness constraint was imposed on the 3D pose extraction of a video. Since the stacked-hourglass network was used for 2D pose estimation on individual frames, this constraint made the predicted 3D poses more stable and reliable even with 2D pose estimation failure in a few frames within the temporal window. Figure 5 shows the example of temporal 3D skeleton joints of video frames extracted by the Pose_3D network.
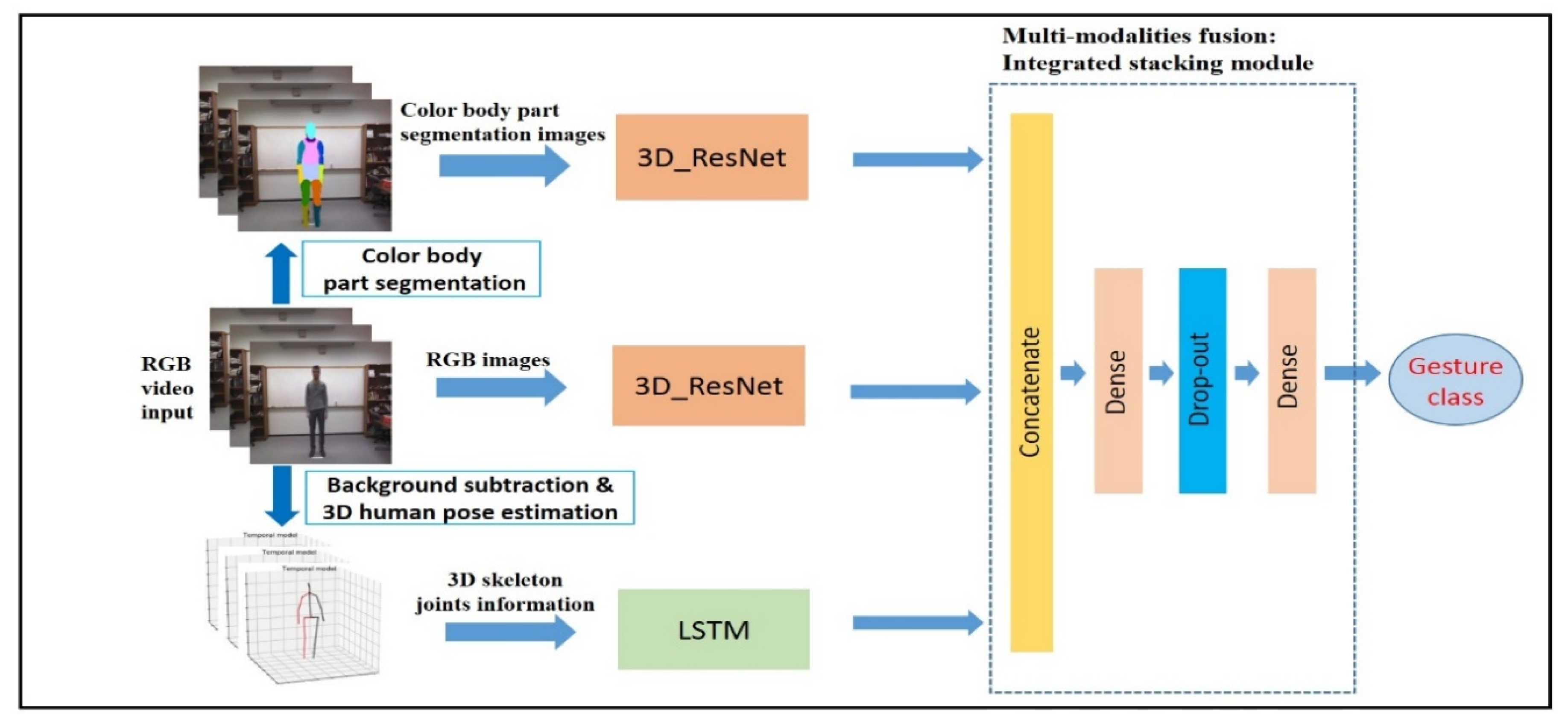
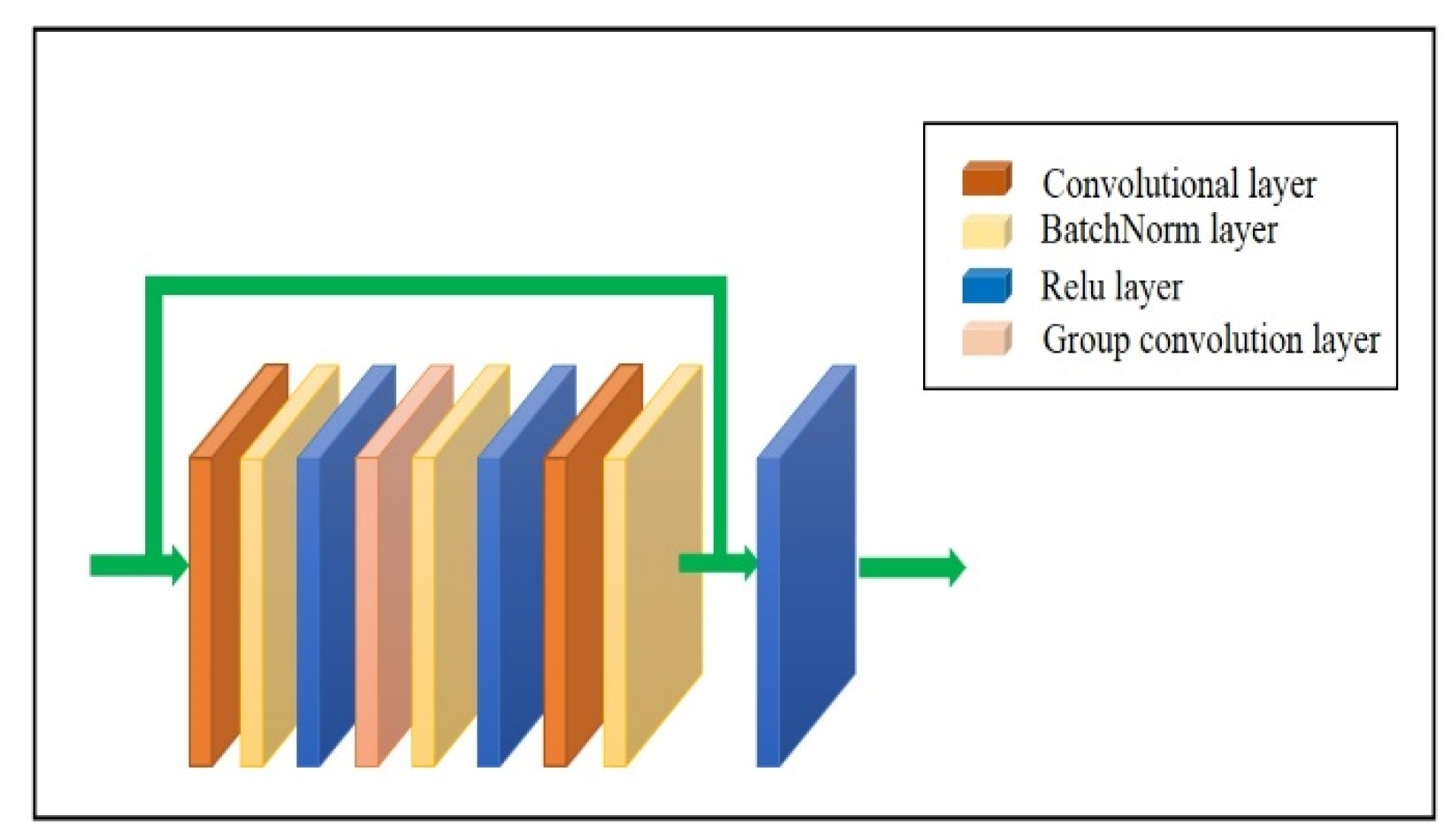
- Two-stream 3D_ResNet networks for RGB and color body part segmentation modalities: The residual 3D_CNN network based on ResNet architecture [23] was applied to benefit from two data modalities: the background subtracted RGB images and color-coded 12 body parts segmentation images for gesture classification. For the input of 3D_CNN of the RGB image branch, we subtracted the background of the RGB image by color body part segmentation and fed it into the network. Due to spatiotemporal feature learning by 3D convolution and 3D pooling, the 3D_CNN network is known as one of the essential frameworks for video classification. Residual 3D_CNN could significantly improve the classification performance of basic 3D_CNN framework. The 3D_ResNet is one of the current residual 3D_CNN versions. Various ResNet-based architectures with 3D convolutions were studied, but the 3D_ResNet network based on ResNeXt-101 was employed because of the quality performance for the proposed method.
- The LSTM network for 3D skeleton joints modality: The LSTM network was proposed as a submodel for gesture recognition to benefit from the extracted 3D skeleton joints data. The 3D skeleton data provides useful information about the temporal features such as the localization of the relevant body joints over a time series to recognize the performed action. The LSTM networks are utilized to capture the contextual information of a temporal sequence for long periods by the gates and memory cells. In an LSTM network, the operation of gates and memory cells by time can be described as follows:where i, f, and o are the vectors of the input gate, the forget gate and the output gate, respectively. and denote the “candidate” hidden state and internal memory of the unit respectively. ht is the output hidden state and σ(.) is a sigmoid function while W and b represent connected weights matrix and bias vectors, respectively.
- Multi-modality fusion by an integrated stacking module: The final gesture class was predicted by the fusion score of three submodels. The multi-modalities fusion block combined the prediction score of submodels in the integrated stacking module, as shown in Figure 3. This module is a more extensive multi-headed neural network, which consists of a concatenation layer, two fully connected layers and a dropout layer to avoid overfitting. We used the outputs of each subnetworks as separate input-heads to the module. The fusion score computed by the fusion block with non-linear operation function Θfusion(.) to predict gesture classes as follows:
4. Experimental Results
4.1. Datasets
- UTD Multimodal Human Action dataset [27]: is a multimodal human action dataset that was collected by using a Microsoft Kinect sensor and a wearable inertial sensor. This data includes 27 different types of actions performed by eight gestures, where each actor repeats each gesture four times. This dataset contains a total of 861 gesture videos after removing corrupted sequences.
- Gaming 3D dataset [28]: is a collection of 600 videos for action recognition in the gaming scenario. This dataset consisted of 20 action classes performed by ten subjects, and each subject repeated each action three times. Besides providing the action class label for each video, this dataset also had the ground truth for the peak frame of each action.
- NTU RGB+D dataset [29]: is a large dataset that contains 56,880 RGB-D videos captured by three Kinect V2 sensors concurrently. This dataset consisted of 60 human activities related to daily actions, mutual actions, and medical conditions. In our work, we only focused on the daily actions category with the RGB video data.
- MSRDailyActivity3D dataset [30]: is a dataset captured for daily human activities in a living room. This collection contained 16 regular activity classes performed by ten different individuals. There are 320 activity videos. This dataset was made with a noisy background with other activities from untargeted people.
4.2. Implementation
4.3. Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hussein, M.E.; Torki, M.; Gowayyed, M.A.; El-Saban, M. Human action recognition using a temporal hierarchy of covariance descriptors on 3d joint locations. In Proceedings of the Twenty-Third International Joint Conference on Artificial Intelligence, Beijing, China, 3–19 August 2013; Volume 13, pp. 2466–2472. [Google Scholar]
- Dardas, N.H.; Georganas, N.D. Real-time hand gesture detection and recognition using bag-of-features and support vector machine techniques. IEEE Trans. Instrum. Meas. 2011, 60, 3592–3607. [Google Scholar] [CrossRef]
- Lee, H.K.; Kim, J.H. An HMM-based threshold model approach for gesture recognition. IEEE Trans. Pattern Anal. Mach. Intell. 1999, 21, 961–973. [Google Scholar]
- Feichtenhofer, C.; Pinz, A.; Zisserman, A. Convolutional two-stream network fusion for video action recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 1933–1941. [Google Scholar]
- Karpathy, A.; Toderici, G.; Shetty, S.; Leung, T.; Sukthankar, R.; Fei-Fei, L. Large-scale video classification with convolutional neural networks. In Proceedings of the IEEE conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 1725–1732. [Google Scholar]
- Ohn-Bar, E.; Trivedi, M.M. Hand gesture recognition in real time for automotive interfaces: A multimodal vision-based approach and evaluations. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2368–2377. [Google Scholar] [CrossRef]
- Tran, D.; Bourdev, L.; Fergus, R.; Torresani, L.; Paluri, M. Learning spatiotemporal features with 3d convolutional networks. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 4489–4497. [Google Scholar]
- Donahue, J.; Anne Hendricks, L.; Guadarrama, S.; Rohrbach, M.; Venugopalan, S.; Saenko, K.; Darrell, T. Long-term recurrent convolutional networks for visual recognition and description. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 2625–2634. [Google Scholar]
- Duan, J.; Zhou, S.; Wan, J.; Guo, X.; Li, S.Z. Multi-Modality Fusion based on consensus-voting and 3D convolution for isolated gesture recognition. arXiv 2016, arXiv:1611.06689. [Google Scholar]
- Chai, X.; Liu, Z.; Yin, F.; Liu, Z.; Chen, X. Two streams recurrent neural networks for large-scale continuous gesture recognition. In Proceedings of the 23rd International Conference on Pattern Recognition (ICPR), Cancun, Mexico, 4–8 December 2016; pp. 31–36. [Google Scholar]
- Wu, D.; Pigou, L.; Kindermans, P.J.; Le, N.D.H.; Shao, L.; Dambre, J.; Odobez, J.M. Deep dynamic neural networks for multimodal gesture segmentation and recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 1583–1597. [Google Scholar] [CrossRef] [PubMed]
- Hara, K.; Kataoka, H.; Satoh, Y. Can spatiotemporal 3D CNNs retrace the history of 2D CNNs and ImageNet? In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 6546–6555. [Google Scholar]
- Lin, G.; Milan, A.; Shen, C.; Reid, I. RefineNet: Multi-path refinement networks for high-resolution semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1925–1934. [Google Scholar]
- Rayat Imtiaz Hossain, M.; Little, J.J. Exploiting temporal information for 3D human pose estimation. In Proceedings of the European Conference on Computer Vision, Munich, Germany, 8–14 September 2018; pp. 68–84. [Google Scholar]
- Kopuklu, O.; Kose, N.; Rigoll, G. Motion fused frames: Data level fusion strategy for hand gesture recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Salt Lake City, UT, USA, 18–22 June 2018; pp. 2103–2111. [Google Scholar]
- Molchanov, P.; Yang, X.; Gupta, S.; Kim, K.; Tyree, S.; Kautz, J. Online detection and classification of dynamic hand gestures with recurrent 3D convolutional neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 4207–4215. [Google Scholar]
- Tran, D.; Ray, J.; Shou, Z.; Chang, S.F.; Paluri, M. ConvNet architecture search for spatiotemporal feature learning. arXiv 2017, arXiv:1708.05038, preprint. [Google Scholar]
- Luvizon, D.C.; Picard, D.; Tabia, H. 2D/3D Pose estimation and action recognition using multitask deep learning. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 5137–5146. [Google Scholar]
- Yan, S.; Xiong, Y.; Lin, D. Spatial temporal graph convolutional networks for skeleton-based action recognition. In Proceedings of the Thirty-second AAAI Conference on Artificial Intelligence, New Orleans, LA, USA, 2–7 February 2018. [Google Scholar]
- Li, M.; Chen, S.; Chen, X.; Zhang, Y.; Wang, Y.; Tian, Q. Actional-structural graph convolutional networks for skeleton-based action recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–20 June 2019; pp. 3595–3603. [Google Scholar]
- Omran, M.; Lassner, C.; Pons-Moll, G.; Gehler, P.; Schiele, B. Neural body fitting: Unifying deep learning and model based human pose and shape estimation. In Proceedings of the International Conference on 3D Vision, Verona, Italy, 5–8 September 2018; pp. 484–494. [Google Scholar]
- Fu, K.; Zhao, Q.; Gu, I.Y.H. Refinet: A deep segmentation assisted refinement network for salient object detection. IEEE Trans. Multimed. 2018, 21, 457–469. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Lassner, C.; Romero, J.; Kiefel, M.; Bogo, F.; Black, M.J.; Gehler, P.V. Unite the people: Closing the loop between 3d and 2d human representations. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 6050–6059. [Google Scholar]
- Newell, A.; Yang, K.; Deng, J. Stacked hourglass networks for human pose estimation. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; pp. 483–499. [Google Scholar]
- Ionescu, C.; Papava, D.; Olaru, V.; Sminchisescu, C. Human3.6m: Large scale datasets and predictive methods for 3d human sensing in natural environments. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 36, 1325–1339. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Jafari, R.; Kehtarnavaz, N. UTD-MHAD: A multimodal dataset for human action recognition utilizing a depth camera and a wearable inertial sensor. In Proceedings of the IEEE International Conference on Image Processing, Quebec City, QC, Canada, 27–30 September 2015; pp. 168–172. [Google Scholar]
- Bloom, V.; Makris, D.; Argyriou, V. G3D: A gaming action dataset and real time action recognition evaluation framework. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops, Providence, RI, USA, 16–21 June 2012; pp. 7–12. [Google Scholar]
- Shahroudy, A.; Liu, J.; Ng, T.T.; Wang, G. NTU RGB+D: A large scale dataset for 3D human activity analysis. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 1010–1019. [Google Scholar]
- Wang, J.; Liu, Z.; Wu, Y.; Yuan, J. Mining actionlet ensemble for action recognition with depth cameras. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 1290–1297. [Google Scholar]
- Soomro, K.; Zamir, A.R.; Shah, M. UCF101: A dataset of 101 human action classes from video in the wild. arXiv 2012, arXiv:1212.0402, preprint. [Google Scholar]
- Sarkar, A.; Gepperth, A.; Handmann, U.; Kopinski, T. Dynamic hand gesture recognition for mobile systems using deep LSTM. In Proceedings of the International Conference on Intelligent Human Computer Interaction, Evry, France, 11–13 December 2017; pp. 19–31. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. In Proceedings of the 3rd International Conference for Learning Representations, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- Carreira, J.; Zisserman, A. Quo vadis, action recognition? In A new model and the kinetics dataset. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 6299–6308. [Google Scholar]
- Liu, K.; Liu, W.; Gan, C.; Tan, M.; Ma, H. T-C3D: Temporal convolutional 3D network for real-time action recognition. In Proceedings of the Thirty-second AAAI Conference on Artificial Intelligence, New Orleans, LA, USA, 2–7 February 2018. [Google Scholar]
- Mahjoub, A.B.; Atri, M. Human action recognition using RGB data. In Proceedings of the 11th International Design & Test Symposium, Hammamet, Tunisia, 18–20 December 2016; pp. 83–87. [Google Scholar]
- Ehatisham-Ul-Haq, M.; Javed, A.; Azam, M.A.; Malik, H.M.; Irtaza, A.; Lee, I.H.; Mahmood, M.T. Robust human activity recognition using multimodal feature-level fusion. IEEE Access 2019, 7, 60736–60751. [Google Scholar] [CrossRef]
- Yang, Z.; Li, Y.; Yang, J.; Luo, J. Action recognition with spatio-temporal visual attention on skeleton image sequences. IEEE Trans. Circuits Syst. Video Technol. 2018, 29, 2405–2415. [Google Scholar] [CrossRef]
- Yu, M.; Liu, L.; Shao, L. Structure-preserving binary representations for RGB-D action recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 38, 1651–1664. [Google Scholar] [CrossRef] [PubMed]
- Luo, J.; Wang, W.; Qi, H. Spatio-temporal feature extraction and representation for RGB-D human action recognition. Pattern Recognit. Lett. 2014, 50, 139–148. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author | Approach/Features | Details | Comments |
|---|---|---|---|
| Hussen et al. [1] | Support Vector Machine (SVM) | Discriminative classification from 3D skeleton joints | Classical machine learning methods. |
| Dardas et al. [2] | Bag of features | Classification via bag-of-words vector | |
| Lee et al. [3] | Hidden Markov Model | HMM based on the likelihood threshold estimation | |
| Feichtenhofer et al. [4] | Two-stream network with separate ConvNets | Extract motion from RGB images and optical flow images | Early deep learning-based methods |
| Kopuklu et al. [15] | Data level fusion | Combine RGB and optical flow modalities with static images | |
| Donahue et al. [8] | Long-term recurrent convolutional network | CNN and LSTM for spatio-temporal features | |
| Tran et al. [17] | 3DCNN, SVM classifier | Spatio-temporal features extracted by 3DCNN | 3DCNN to capture spatial and temporal features |
| Molchanov et al. [16] | Recurrent 3D Convolutional Neural Networks | Online gesture recognition by 3DCNN | |
| Yan et al. [19], Li et al. [20], and Omran et al. [21] | RNN or LSTM, human skeleton joints | Capture temporal features from skeleton joints and depth | Deep learning + human pose |
| Duan et al. [9] | Convolutional two-stream consensus voting network | Combine the results from RGB and depth in a video input | Multi-modal or multiple deep learning models |
| Chai et al. [10] | Multi-stream model based on RNN | Extract hand location information from RGB-D input |
| Datasets/Methods | UTD Multimodal Human Action | Gaming 3D | NTU RGB+D | MSRDaily Activity3D |
|---|---|---|---|---|
| C3D [7] | 85.3 | 89.1 | 83.3 | 87.5 |
| LRCN [8] | 83.0 | - | - | - |
| ST-GCN [19] | - | - | 88.3 | - |
| I3D [34] | 90.7 | 93.8 | 85.8 | 88.4 |
| T_C3D [35] | 89.5 | 90.3 | 85.7 | 88.9 |
| STIP [36] | 70.3 | - | - | - |
| [37] (RGB, Accelerometer, Gyroscope) | 97.6 | - | - | - |
| TSSI + GLAN + SSAN [38] | - | - | 89.1 | - |
| Structure Preserving Projection (RGB+ Depth) [39] | - | - | - | 89.8 |
| ScTPM + CS-Mltp(RGB+ Depth) [40] | - | - | - | 90.6 |
| Proposed method | 96.7 | 95.3 | 90.4 | 90.3 |
| Method | Accuracy (%) |
|---|---|
| 3D_ResNet (RGB) | 92.1 |
| 3D_ResNet (color body part segmentation) | 94.6 |
| LSTM (3D skeleton joints) | 95.4 |
| Fusion Result | 96.7 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, N.-H.; Phan, T.-D.-T.; Lee, G.-S.; Kim, S.-H.; Yang, H.-J. Gesture Recognition Based on 3D Human Pose Estimation and Body Part Segmentation for RGB Data Input. Appl. Sci. 2020, 10, 6188. https://doi.org/10.3390/app10186188
Nguyen N-H, Phan T-D-T, Lee G-S, Kim S-H, Yang H-J. Gesture Recognition Based on 3D Human Pose Estimation and Body Part Segmentation for RGB Data Input. Applied Sciences. 2020; 10(18):6188. https://doi.org/10.3390/app10186188
Chicago/Turabian StyleNguyen, Ngoc-Hoang, Tran-Dac-Thinh Phan, Guee-Sang Lee, Soo-Hyung Kim, and Hyung-Jeong Yang. 2020. "Gesture Recognition Based on 3D Human Pose Estimation and Body Part Segmentation for RGB Data Input" Applied Sciences 10, no. 18: 6188. https://doi.org/10.3390/app10186188
APA StyleNguyen, N.-H., Phan, T.-D.-T., Lee, G.-S., Kim, S.-H., & Yang, H.-J. (2020). Gesture Recognition Based on 3D Human Pose Estimation and Body Part Segmentation for RGB Data Input. Applied Sciences, 10(18), 6188. https://doi.org/10.3390/app10186188