Vibration Parameters Estimation by Blade Tip-Timing in Mistuned Bladed Disks in Presence of Close Resonances



Abstract
1. Introduction
- -
- in the laboratory during the engine test phase, to obtain the natural frequencies and the damping of the blade and blisk (integrally bladed rotor [1]) in order to have experimental parameters to update the numerical models;
- -
- in operation for the control of vibrations and for monitoring the health of the engine.
- they only measure the deformation of the blades on which they are glued, they must therefore be glued on all the blades to control them all;
- they are connected to telemetry/slip ring; this might require important changes to rotating and stationary parts and implies integration of instrumentation hardware, in order to get accurate vibration response with the best Signal-to-Noise Ratio (SNR), these modifications are costly and time consuming;
- the adaptations required by the strain gauge installation could lead to constraints for some other turbomachine parameters (for instance, the aerodynamic ones).
2. Methodology of the Analysis Method
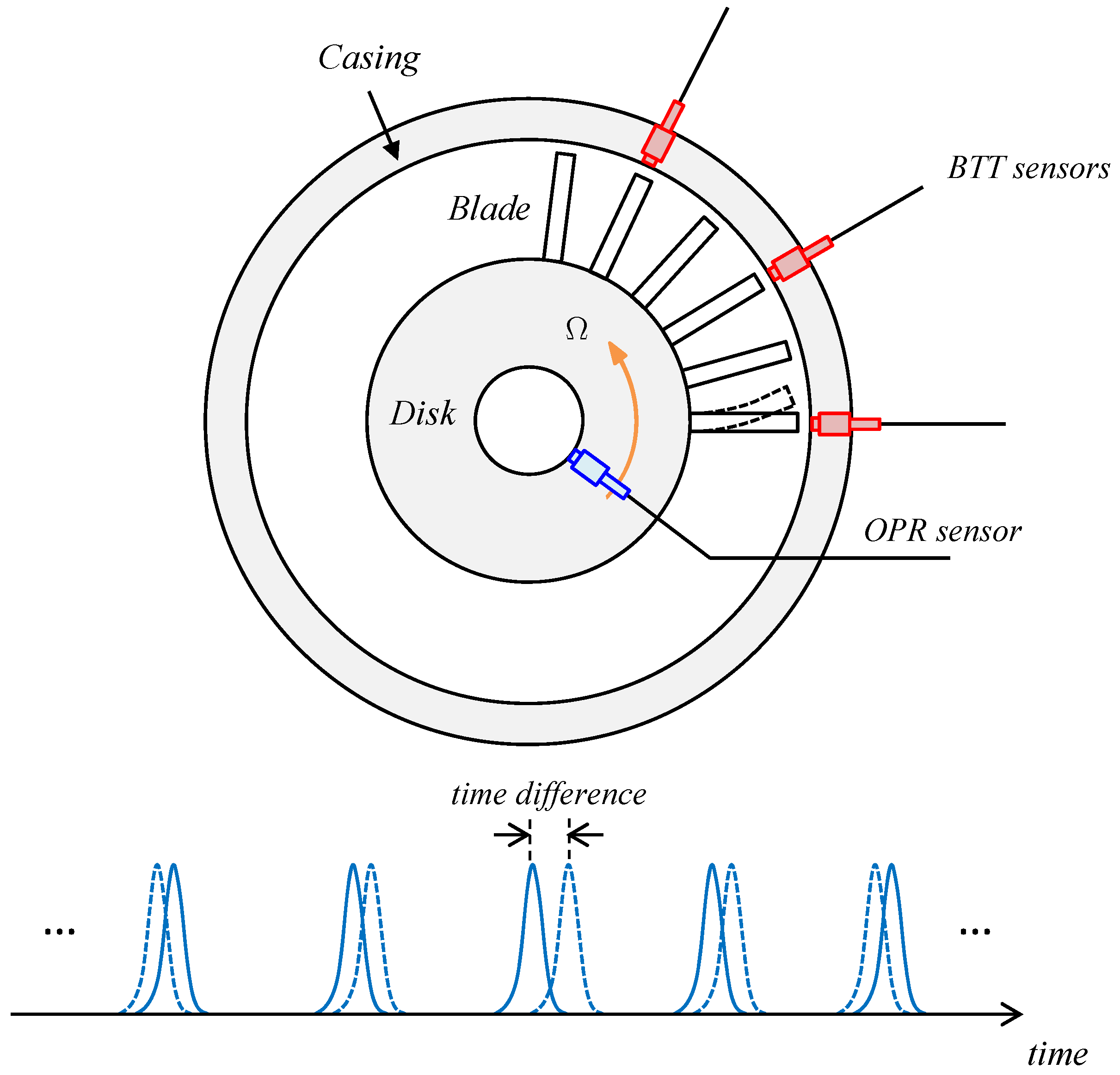
2.1. Tip Timing Basic Principles
2.2. Two Degrees of Freedom Fitting Method
2.3. Fitting Procedure
2.4. Reference Test Case
2.5. Generation of Sampled Data
3. Discussion of Results
3.1. Low Damping Case
3.2. High Damping Case
3.3. Noisy Signals
4. Conclusions
- -
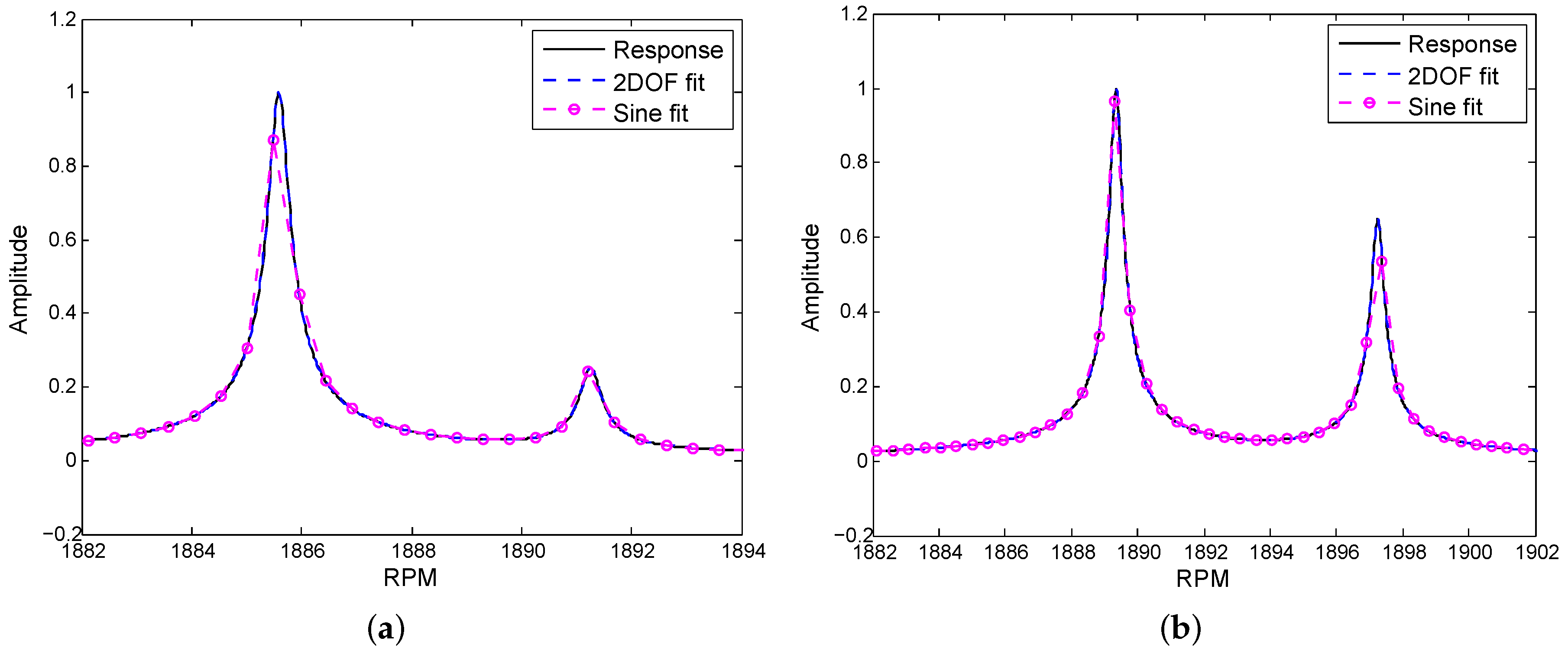
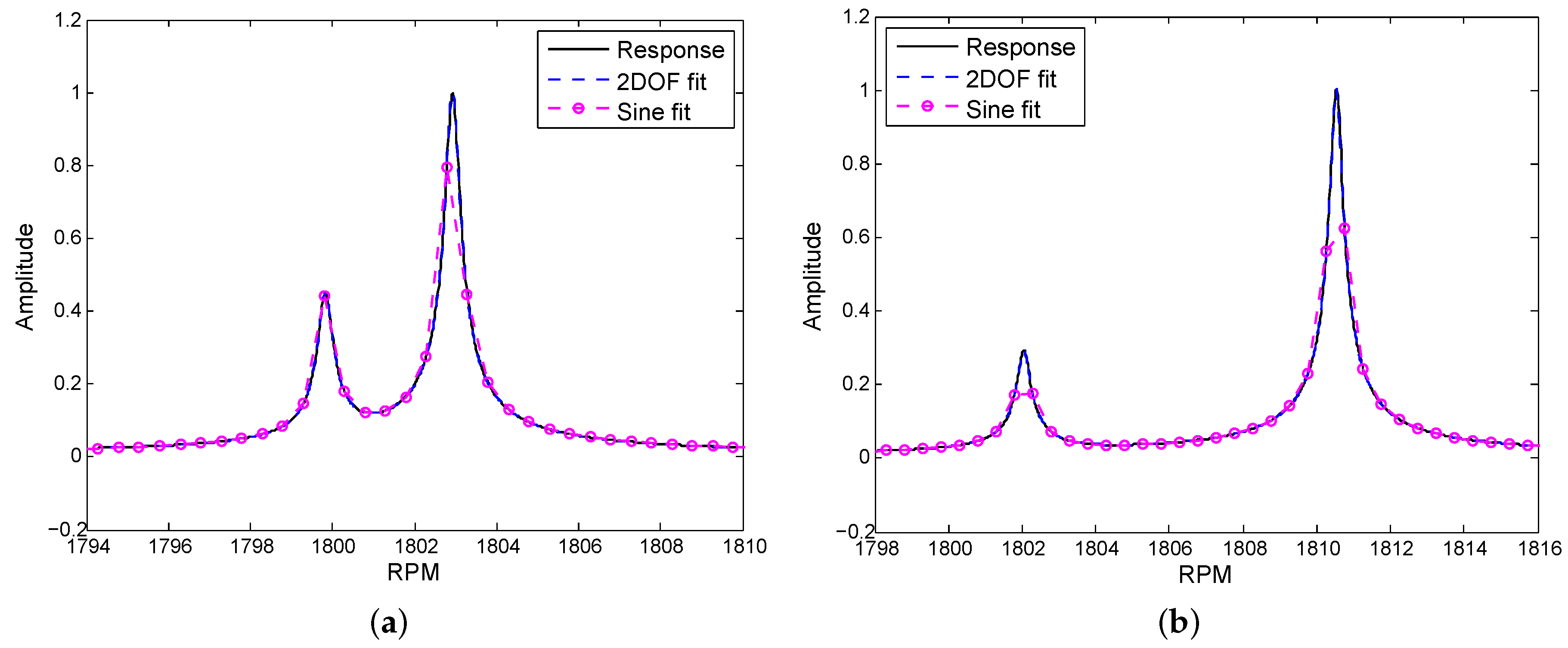
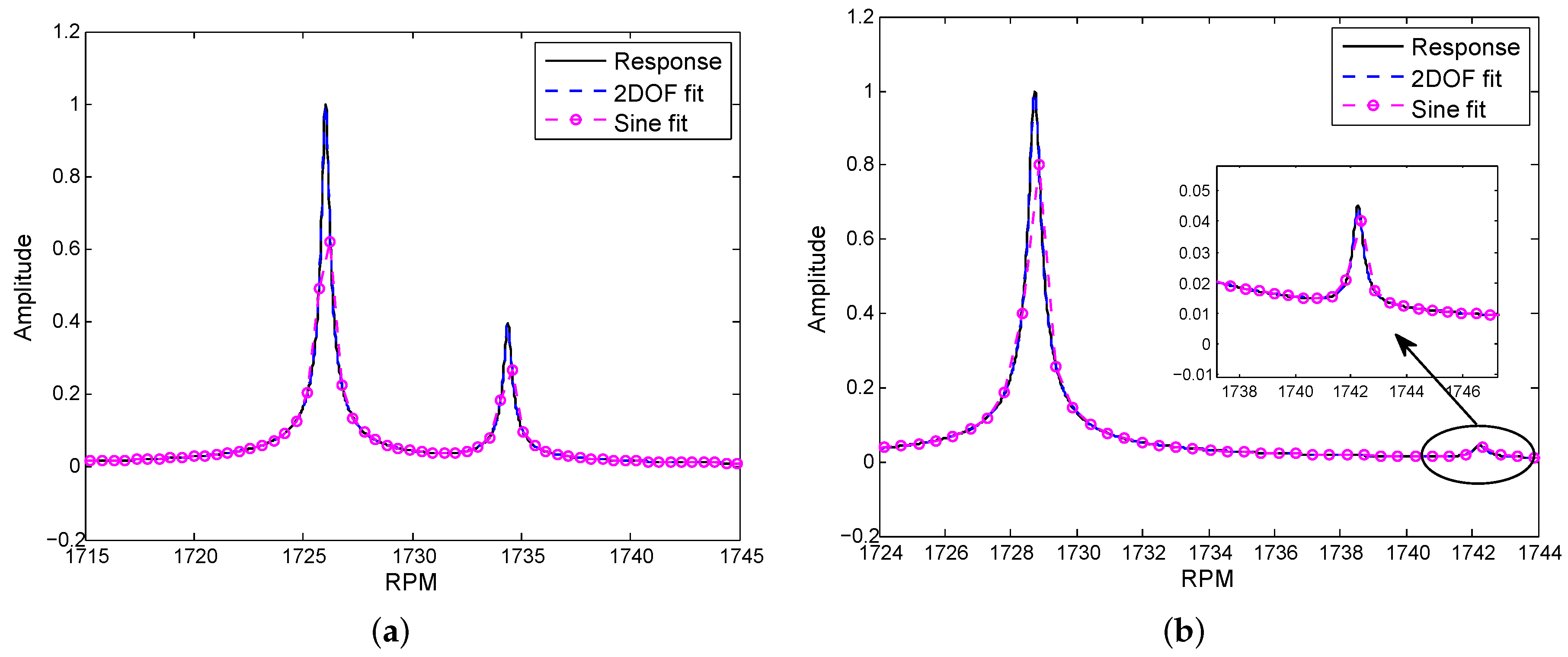
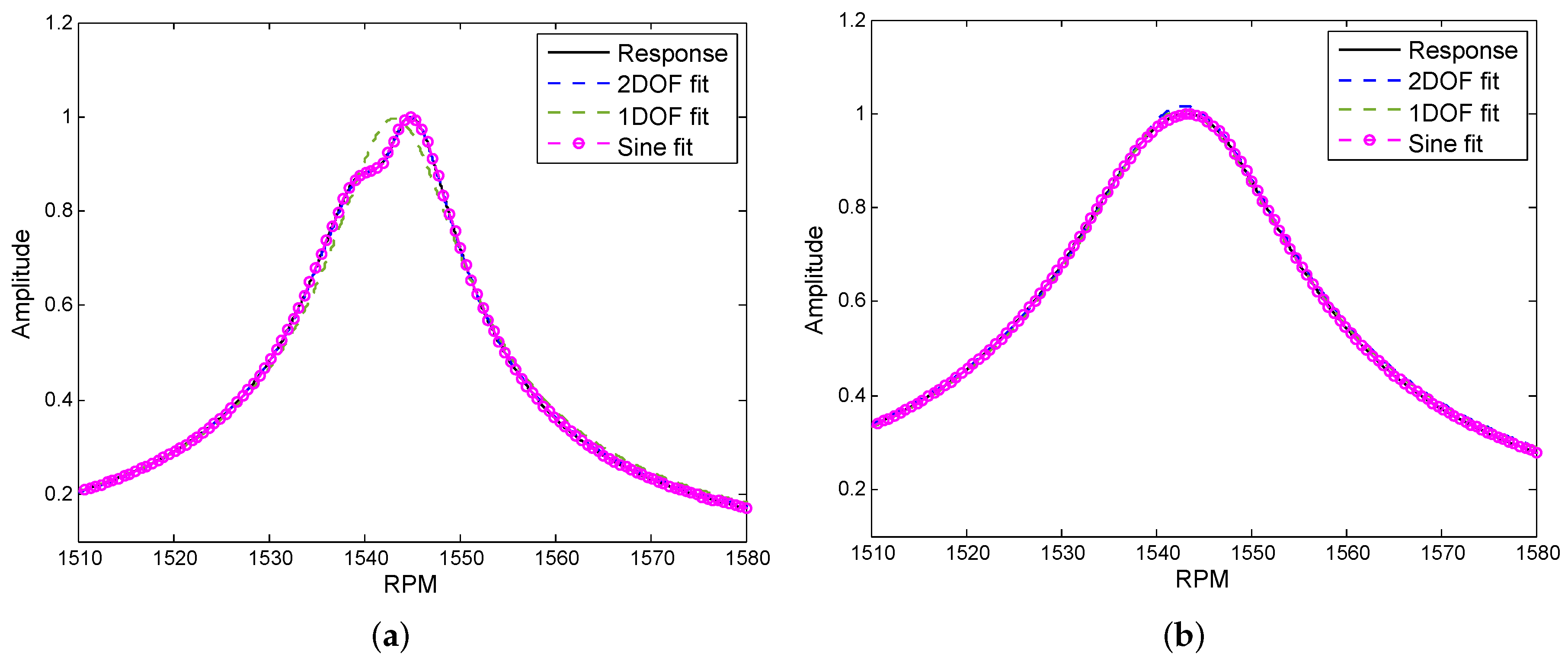
- The 2DOF fitting method is more accurate than the Sine fit method in the determination of the maximum response amplitude when the two peaks are very sharp and well separated since the damping is very low (). In this case, the 2DOF model can directly estimate the fitting parameters, damping value and resonance frequency, associated to each peak with an accuracy lower than 1%. The Sine fit method is less accurate since it is sensitive to the number of samples of the BTT data which is considerably affected by the rate of acceleration or deceleration, while the 2DOF method is not so sensitive to the sampling rate since it is based on a mathematical model of the response curve.
- -
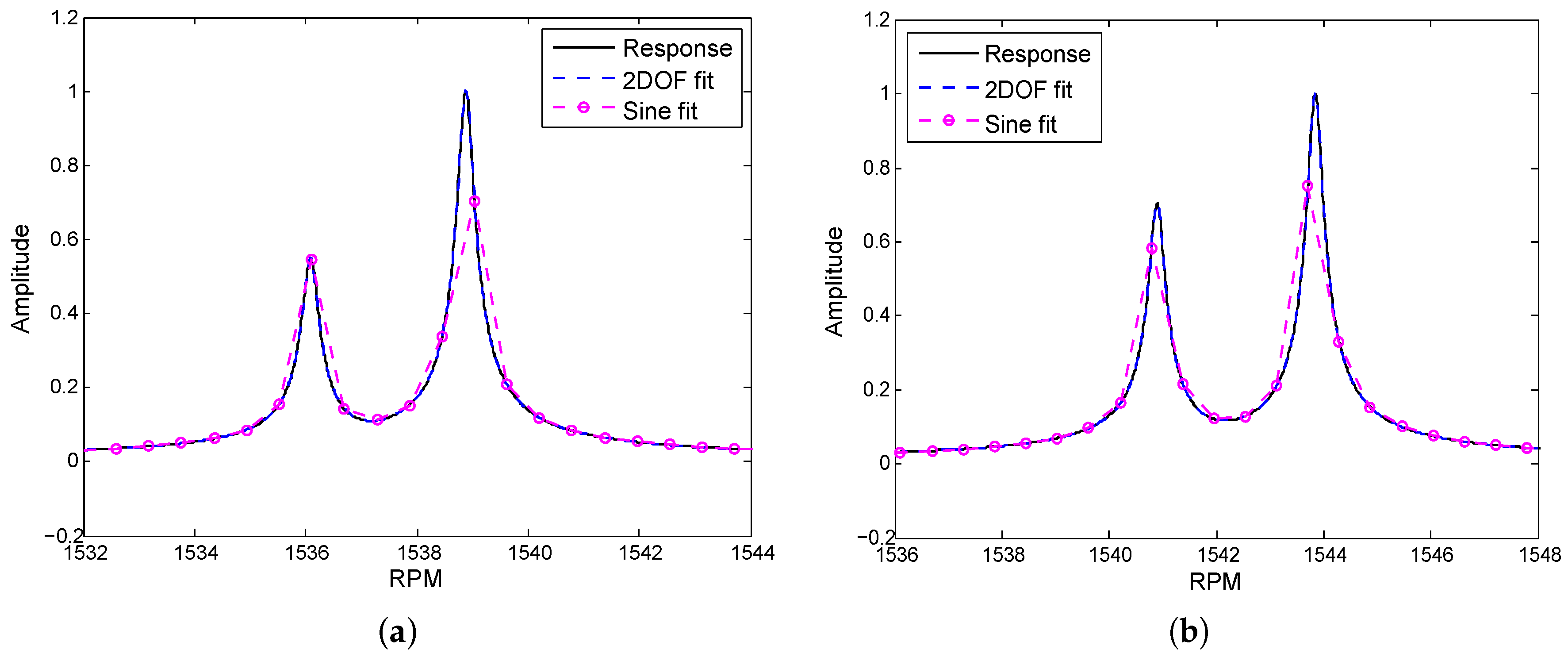
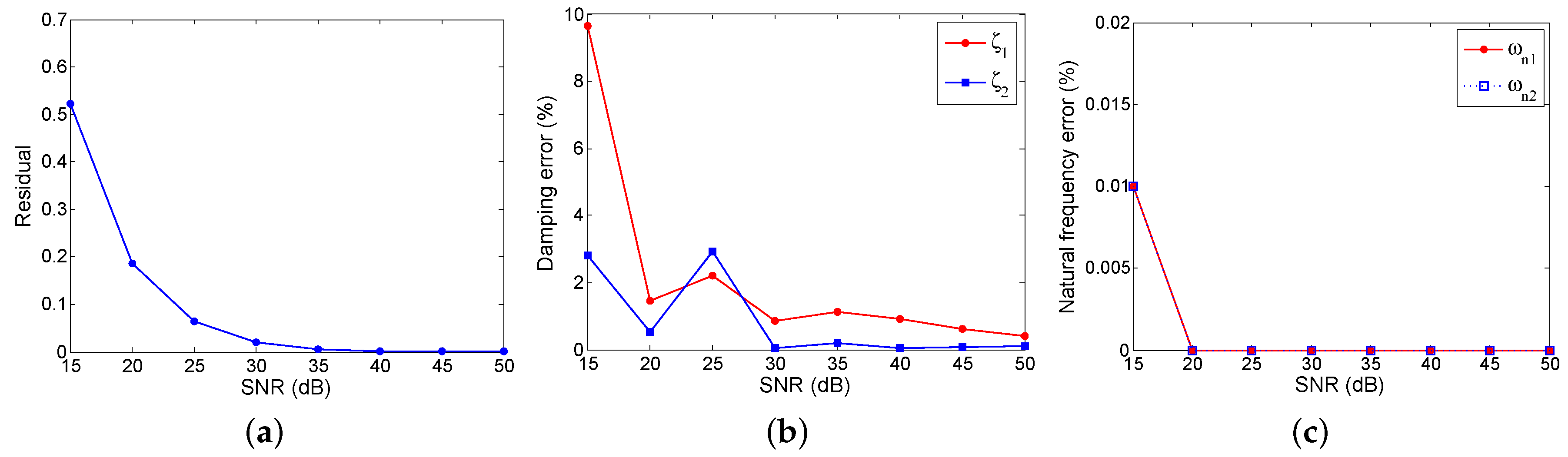
- As the damping increases ( = 0.002–0.003), the two peaks have more overlap and appear as a wider peak. In this case the 2DOF method has the same accuracy as the Sine fitting method in estimating the amplitude of the response. In addition, the 2DOF method is able to estimate the damping value directly from the fitting with errors still less than 1%. In the presence of noise (with SNR higher than 20 dB) the error remains below 5%. On the contrary the Sine fit method does not get the damping value directly from the fitting but requires to estimate the damping from the width of the peak itself and this estimate can be altered by the fact that there are two overlapped peaks.
- -
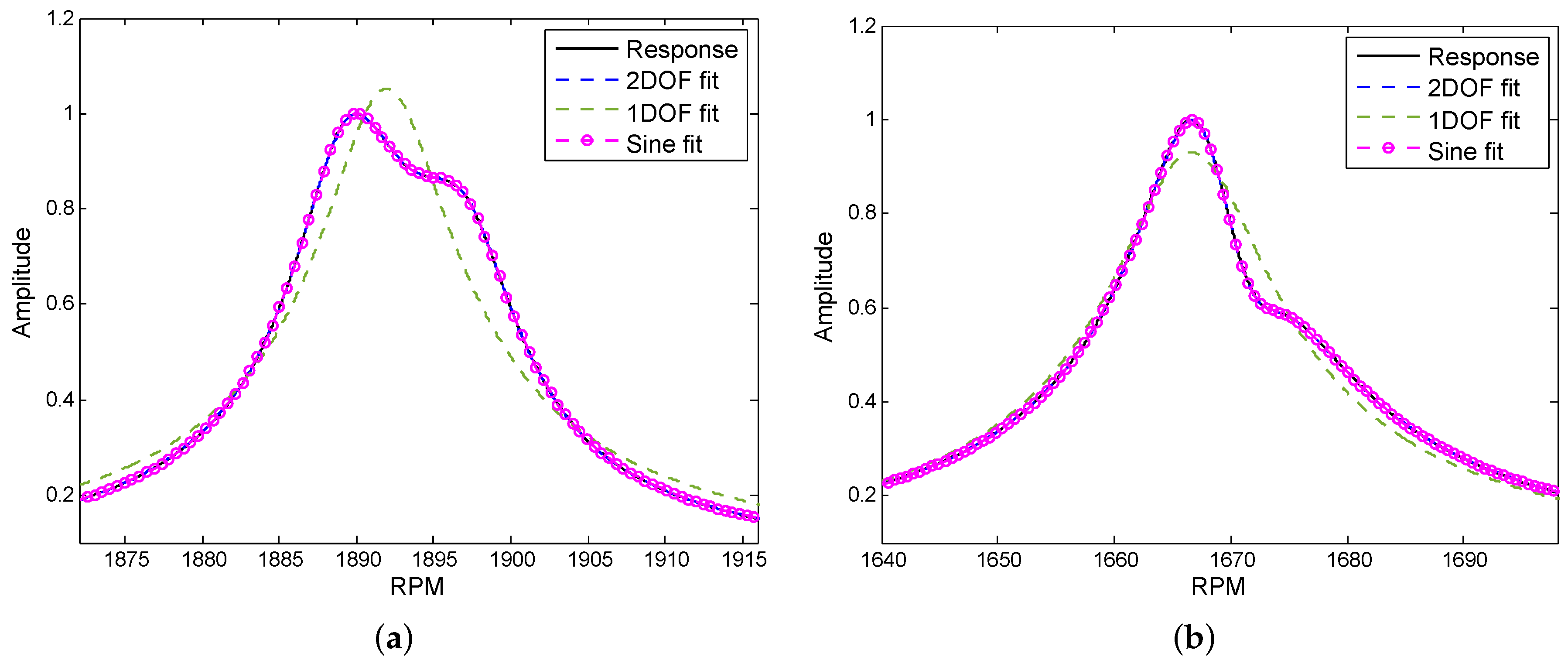
- For even higher damping values () when only one single peak is visible because the two peaks are merged, the two methods (2DOF and Sine fit) are equivalent. The 2DOF method can no longer obtain the damping values associated with the two modes with the same accuracy as in the previous cases.
Author Contributions
Funding
Conflicts of Interest
References
- Gonzalez-Barrio, H.; Calleja-Ochoa, A.; Lamikiz, A.; Lopez de Lacalle, L. Manufacturing Processes of Integral Blade Rotors for Turbomachinery, Processes and New Approaches. Appl. Sci. 2020, 10, 3063. [Google Scholar] [CrossRef]
- Russhard, P. The rise and fall of the rotor blade strain gauge. In Vibration Engineering and Technology of Machinery; Springer: Berlin/Heidelberg, Germany, 2015; pp. 27–37. [Google Scholar]
- Knappett, D.; Garcia, J. Blade tip timing and strain gauge correlation on compressor blades. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2008, 222, 497–506. [Google Scholar] [CrossRef]
- Tomassini, R.; Rossi, G.; Brouckaert, J.F. On the development of a magnetoresistive sensor for blade tip timing and blade tip clearance measurement systems. Rev. Sci. Instrum. 2016, 87, 102505. [Google Scholar] [CrossRef] [PubMed]
- Jamia, N.; Friswell, M.I.; El-Borgi, S.; Rajendran, P. Modelling and experimental validation of active and passive eddy current sensors for blade tip timing. Sens. Actuators A Phys. 2019, 285, 98–110. [Google Scholar] [CrossRef]
- Chen, Z.; Yang, Y.; Xie, Y.; Guo, B.; Hu, Z. Non-contact crack detection of high-speed blades based on principal component analysis and Euclidian angles using optical-fiber sensors. Sens. Actuators A Phys. 2013, 201, 66–72. [Google Scholar] [CrossRef]
- Abdul-Aziz, A.; Woike, M.R.; Clem, M.; Baaklini, G. Engine rotor health monitoring: An experimental approach to fault detection and durability assessment. In Proceedings of the Smart Sensor Phenomena, Technology, Networks, and Systems Integration 2015, San Diego, CA, USA, 8–12 March 2015; Volume 9436, p. 94360A. [Google Scholar]
- Rzadkowski, R.; Rokicki, E.; Piechowski, L.; Szczepanik, R. Analysis of middle bearing failure in rotor jet engine using tip-timing and tip-clearance techniques. Mech. Syst. Signal Process. 2016, 76, 213–227. [Google Scholar] [CrossRef]
- Zablotskiy, I.Y.; Korostelev, Y.A. Measurement of Resonance Vibrations of Turbine Blades with the ELURA Device; Technical Report; Foreign Technology Div Wright-Patterson AFB: Dayton, OH, USA, 1978. [Google Scholar]
- Heath, S.; Imregun, M. An improved single-parameter tip-timing method for turbomachinery blade vibration measurements using optical laser probes. Int. J. Mech. Sci. 1996, 38, 1047–1058. [Google Scholar] [CrossRef]
- Heath, S. A new technique for identifying synchronous resonances using tip-timing. J. Eng. Gas Turbines Power 2000, 122, 219–225. [Google Scholar] [CrossRef]
- Schlagwein, G.; Schaber, U. Non-contact blade vibration measurement analysis using a multi-degree-of-freedom model. Proc. Inst. Mech. Eng. Part A J. Power Energy 2006, 220, 611–618. [Google Scholar] [CrossRef]
- Rigosi, G.; Battiato, G.; Berruti, T.M. Synchronous vibration parameters identification by tip timing measurements. Mech. Res. Commun. 2017, 79, 7–14. [Google Scholar] [CrossRef]
- Heath, S. A Study of Tip-Timing Measurement Techniques for the Determination of Bladed-Disk Vibration Characteristics. Ph.D. Thesis, University of London, London, UK, 1997. [Google Scholar]
- Carrington, I.B.; Wright, J.R.; Cooper, J.; Dimitriadis, G. A comparison of blade tip timing data analysis methods. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2001, 215, 301–312. [Google Scholar] [CrossRef]
- Russhard, P. Development of a Blade Tip Timing Based Engine Health Monitoring System; The University of Manchester: Manchester, UK, 2010. [Google Scholar]
- Guo, H.; Duan, F.; Zhang, J. Blade resonance parameter identification based on tip-timing method without the once-per revolution sensor. Mech. Syst. Signal Process. 2016, 66–67, 625–639. [Google Scholar] [CrossRef]
- Heller, D.; Sever, I.; Schwingshackl, C. A method for multi-harmonic vibration analysis of turbomachinery blades using Blade Tip-Timing and clearance sensor waveforms and optimization techniques. Mech. Syst. Signal Process. 2020, 142, 106741. [Google Scholar] [CrossRef]
- Mohamed, M.; Bonello, P.; Russhard, P. A novel method for the determination of the change in blade tip timing probe sensing position due to steady movements. Mech. Syst. Signal Process. 2019, 126, 686–710. [Google Scholar] [CrossRef]
- Battiato, G.; Firrone, C.; Berruti, T. Forced response of rotating bladed disks: Blade Tip-Timing measurements. Mech. Syst. Signal Process. 2017, 85, 912–926. [Google Scholar] [CrossRef]
- Bornassi, S.; Ghalandari, M.; Maghrebi, S.F. Blade synchronous vibration measurements of a new upgraded heavy duty gas turbine MGT-70 (3) by using tip-timing method. Mech. Res. Commun. 2020, 104, 103484. [Google Scholar] [CrossRef]
- Rao, S.S. Vibration of Continuous Systems; Wiley Online Library: Hoboken, NJ, USA, 2007; Volume 464. [Google Scholar]
- Urbikain, G.; Campa, F.J.; Zulaika, J.J.; De Lacalle, L.N.L.; Alonso, M.A.; Collado, V. Preventing chatter vibrations in heavy-duty turning operations in large horizontal lathes. J. Sound Vib. 2015, 340, 317–330. [Google Scholar] [CrossRef]
- Lee, S.Y.; Castanier, M.; Pierre, C. Assessment of probabilistic methods for mistuned bladed disk vibration. In Proceedings of the 46th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Austin, TX, USA, 18–21 April 2005; p. 1990. [Google Scholar]
- Martel, C.; Corral, R. Asymptotic description of maximum mistuning amplification of bladed disk forced response. J. Eng. Gas Turbines Power 2009, 131, 022506. [Google Scholar] [CrossRef]
- Kenyon, J.A.; Griffin, J. Experimental demonstration of maximum mistuned bladed disk forced response. In Proceedings of the Turbo Expo: Power for Land, Sea, and Air, Atlanta, GA, USA, 16–19 June 2003; Volume 36878, pp. 195–205. [Google Scholar]
- Rivas-Guerra, A.J.; Mignolet, M. Local/global effects of mistuning on the forced response of bladed disks. J. Eng. Gas Turbines Power 2004, 126, 131–141. [Google Scholar] [CrossRef]
- Dimitriadis, G.; Carrington, I.B.; Wright, J.R.; Cooper, J.E. Blade-tip timing measurement of synchronous vibrations of rotating bladed assemblies. Mech. Syst. Signal Process. 2002, 16, 599–622. [Google Scholar] [CrossRef]
- Zhao, T.; Yuan, H.; Yang, W.; Sun, H. Genetic particle swarm parallel algorithm analysis of optimization arrangement on mistuned blades. Eng. Optim. 2017, 49, 2095–2116. [Google Scholar] [CrossRef]
- Ewins, D.J. The effects of detuning upon the forced vibrations of bladed disks. J. Sound Vib. 1969, 9, 65–79. [Google Scholar] [CrossRef]
- Fu, Z.F.; He, J. Modal Analysis; Elsevier: Amsterdam, The Netherlands, 2001. [Google Scholar]
- Jeffers, T.; Kielb, J.; Abhari, R. A novel technique for the measurement of blade damping using piezoelectric actuators. In Turbo Expo 2000: Power for Land, Sea, and Air; American Society of Mechanical Engineers: New York, NY, USA, 2000. [Google Scholar]
- Kielb, J.; Abhari, R.S. Experimental study of aerodynamic and structural damping in a full-scale rotating turbine. J. Eng. Gas Turbines Power 2003, 125, 102–112. [Google Scholar] [CrossRef]
- Kammerer, A.; Abhari, R.S. Experimental study on impeller blade vibration during resonance—Part II: Blade damping. J. Eng. Gas Turbines Power 2009, 131, 022509. [Google Scholar] [CrossRef]
- Wu, S.; Chen, X.; Russhard, P.; Yan, R.; Tian, S.; Wang, S.; Zhao, Z. Blade tip timing: From raw data to parameters identification. In Proceedings of the 2019 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Auckland, New Zealand, 20–23 May 2019; pp. 1–5. [Google Scholar]
- Russhard, P. Blade tip timing (BTT) uncertainties. AIP Conf. Proc. 2016, 1740, 020003. [Google Scholar]
- Jousselin, O. Development of Blade Tip Timing Techniques in Turbo Machinery; The University of Manchester: Manchester, UK, 2013. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
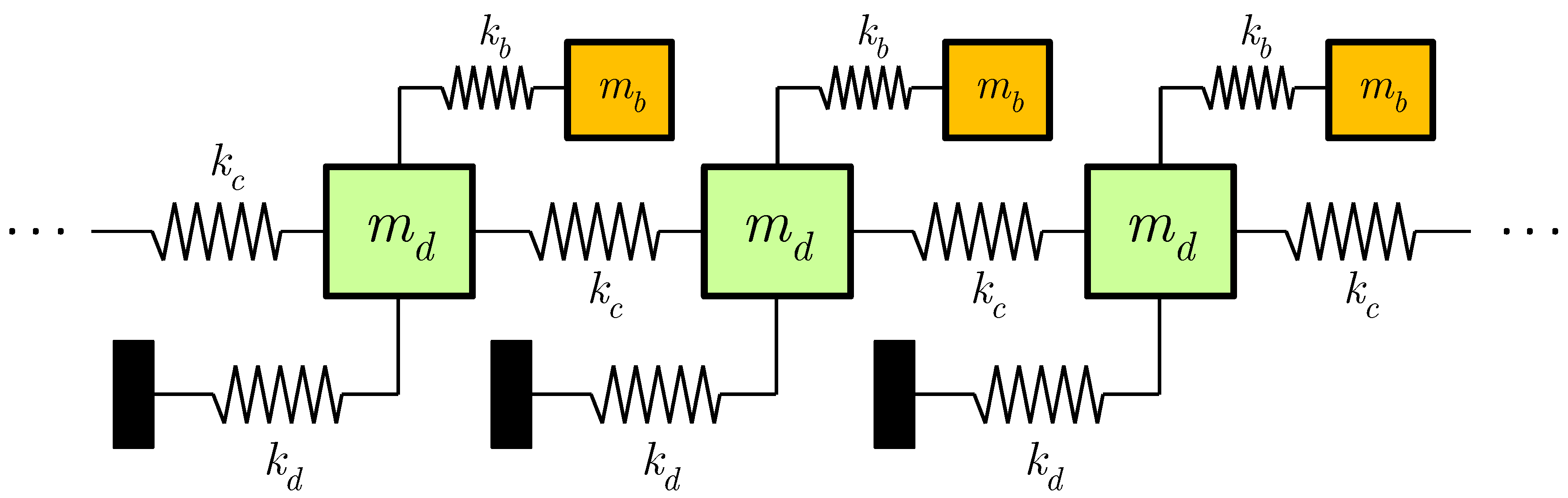
| Single blade mass | 1 | kg | |
| Disk sector mass | 4 | kg | |
| Blade stiffness | 5 × 10 | N/m | |
| Disk stiffness | 1 × 10 | N/m | |
| Coupling stiffness | 1 × 10 | N/m |
| Parameters | SD = 0.05 | SD = 0.10 | ||||
|---|---|---|---|---|---|---|
| Exact Value | Calculated | Difference (%) | Exact Value | Calculated | Difference (%) | |
| Frequency 1 | 157.1322 | 157.1322 | 0.00 | 157.4456 | 157.4456 | 0.00 |
| Frequency 2 | 157.6046 | 157.6046 | 0.00 | 158.1039 | 158.1039 | 0.00 |
| Damping 1 | 0.00009985 | 0.00009987 | 0.02 | 0.00009979 | 0.00009981 | 0.02 |
| Damping 2 | 0.00010015 | 0.00010000 | 0.15 | 0.00010021 | 0.00010017 | 0.04 |
| Residual | 5.3537 × 10 | 1.6128 × 10 | ||||
| 2DOF | 1DOF | ||||
|---|---|---|---|---|---|
| EO = 5 | |||||
| Parameters | Exact Value | Calculated | Difference (%) | Calculated | Difference (%) |
| Frequency 1 | 157.4456 | 157.4470 | 0.00 | 157.6627 | 0.14 |
| Frequency 2 | 158.1039 | 158.1063 | 0.00 | — | — |
| Damping 1 | 0.001995 | 0.001987 | 0.40 | 0.002243 | 12.39 |
| Damping 2 | 0.002004 | 0.002006 | 0.13 | — | — |
| EO = 8 | |||||
| Frequency 1 | 222.3561 | 222.3663 | 0.00 | 222.2287 | 0.35 |
| Frequency 2 | 223.0106 | 222.9823 | 0.01 | — | — |
| Damping 1 | 0.002995 | 0.002988 | 0.24 | 0.004071 | 35.91 |
| Damping 2 | 0.003004 | 0.003018 | 0.46 | — | — |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bornassi, S.; Firrone, C.M.; Berruti, T.M. Vibration Parameters Estimation by Blade Tip-Timing in Mistuned Bladed Disks in Presence of Close Resonances. Appl. Sci. 2020, 10, 5930. https://doi.org/10.3390/app10175930
Bornassi S, Firrone CM, Berruti TM. Vibration Parameters Estimation by Blade Tip-Timing in Mistuned Bladed Disks in Presence of Close Resonances. Applied Sciences. 2020; 10(17):5930. https://doi.org/10.3390/app10175930
Chicago/Turabian StyleBornassi, Saeed, Christian Maria Firrone, and Teresa Maria Berruti. 2020. "Vibration Parameters Estimation by Blade Tip-Timing in Mistuned Bladed Disks in Presence of Close Resonances" Applied Sciences 10, no. 17: 5930. https://doi.org/10.3390/app10175930
APA StyleBornassi, S., Firrone, C. M., & Berruti, T. M. (2020). Vibration Parameters Estimation by Blade Tip-Timing in Mistuned Bladed Disks in Presence of Close Resonances. Applied Sciences, 10(17), 5930. https://doi.org/10.3390/app10175930