Analysis on Dynamic Contact Characteristics and Dynamic Stiffness Estimating Method of Single Nut Ball Screw Pair Based on the Whole Rolling Elements Model



Abstract
1. Introduction
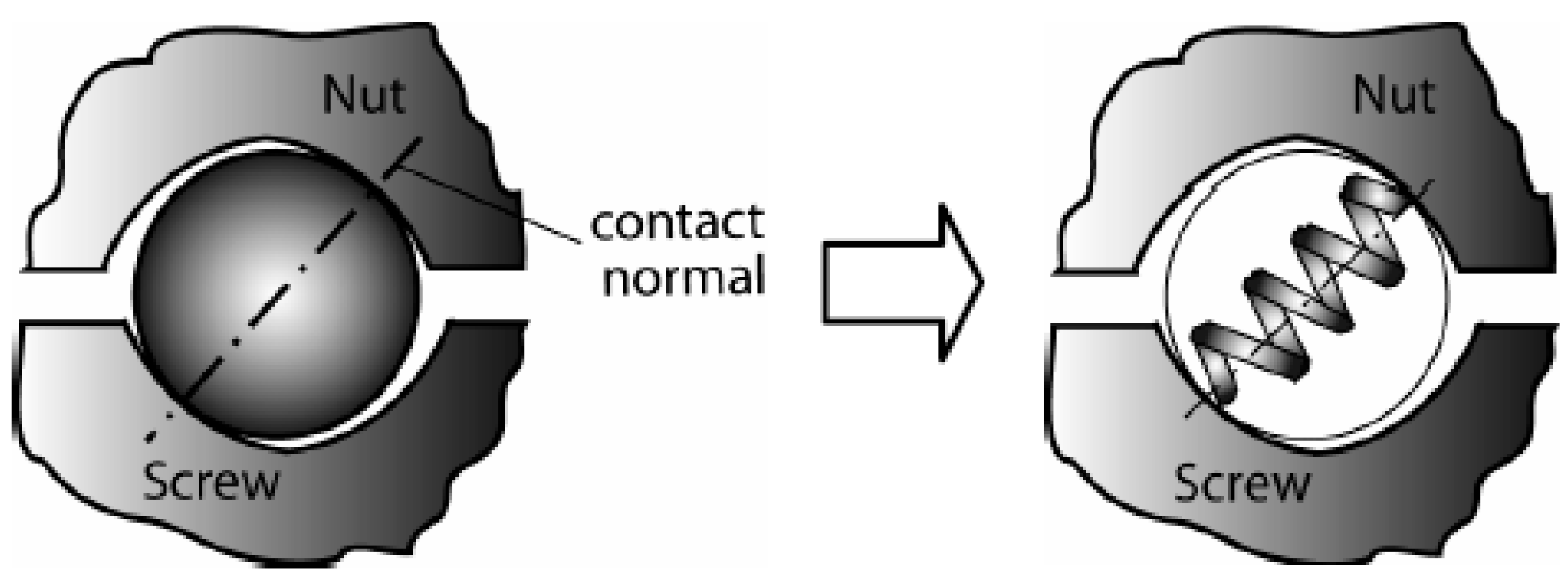
2. Dynamic Contact Model of SNBSP
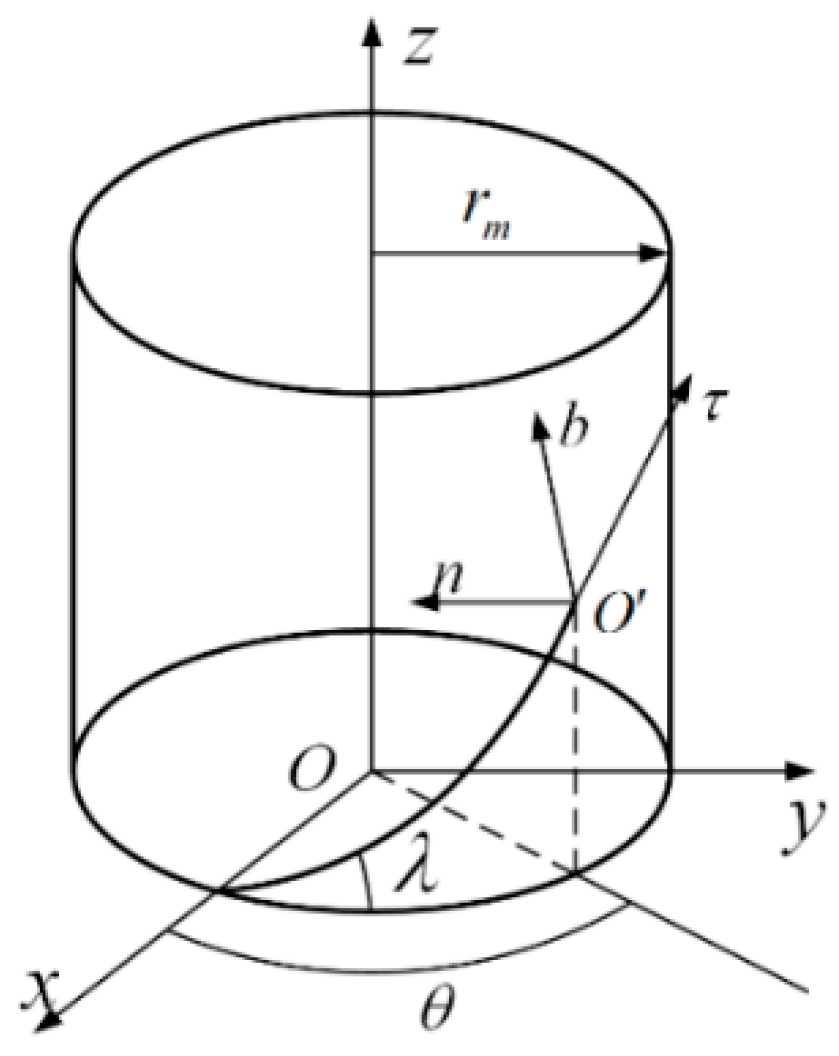
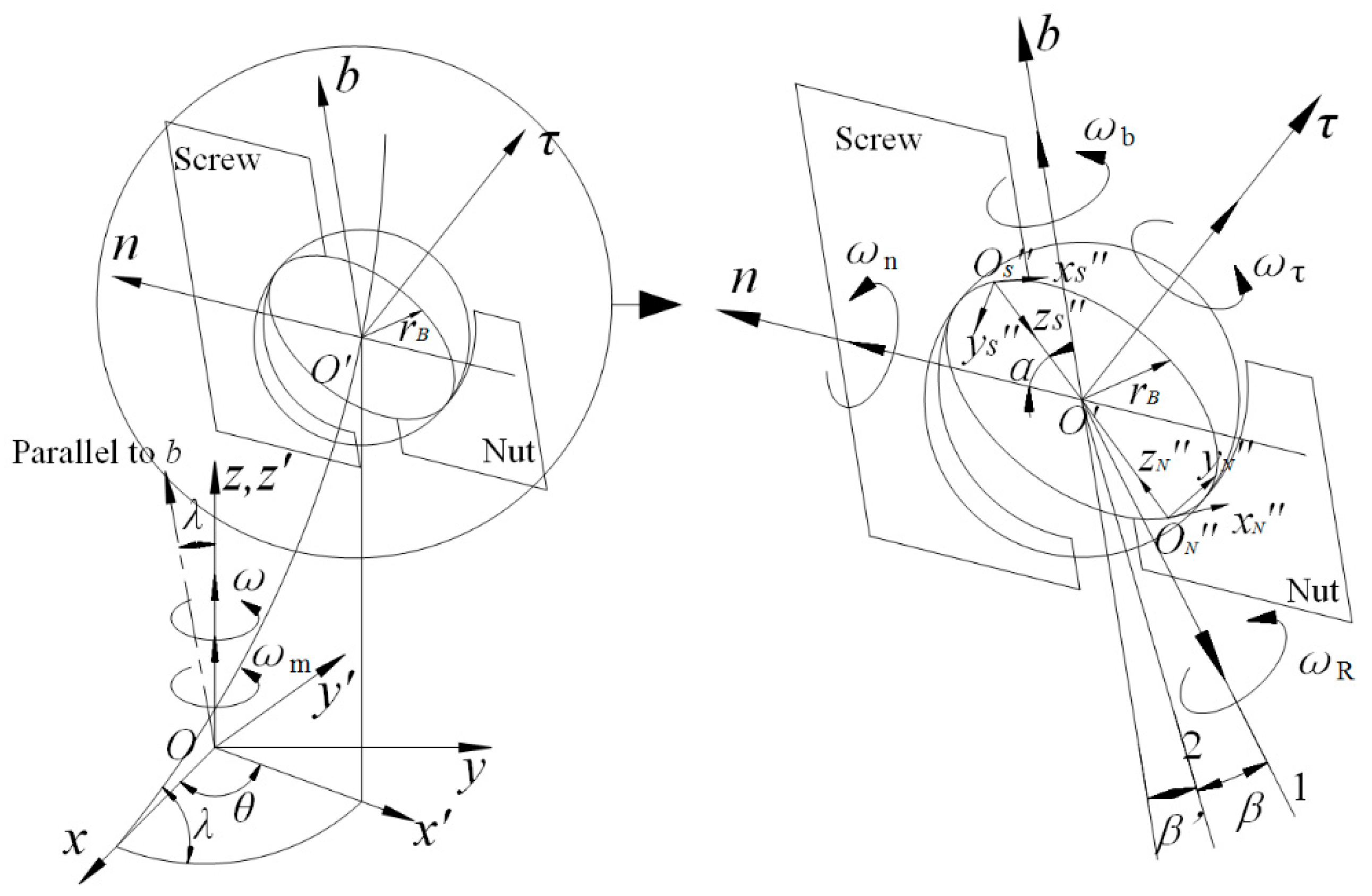
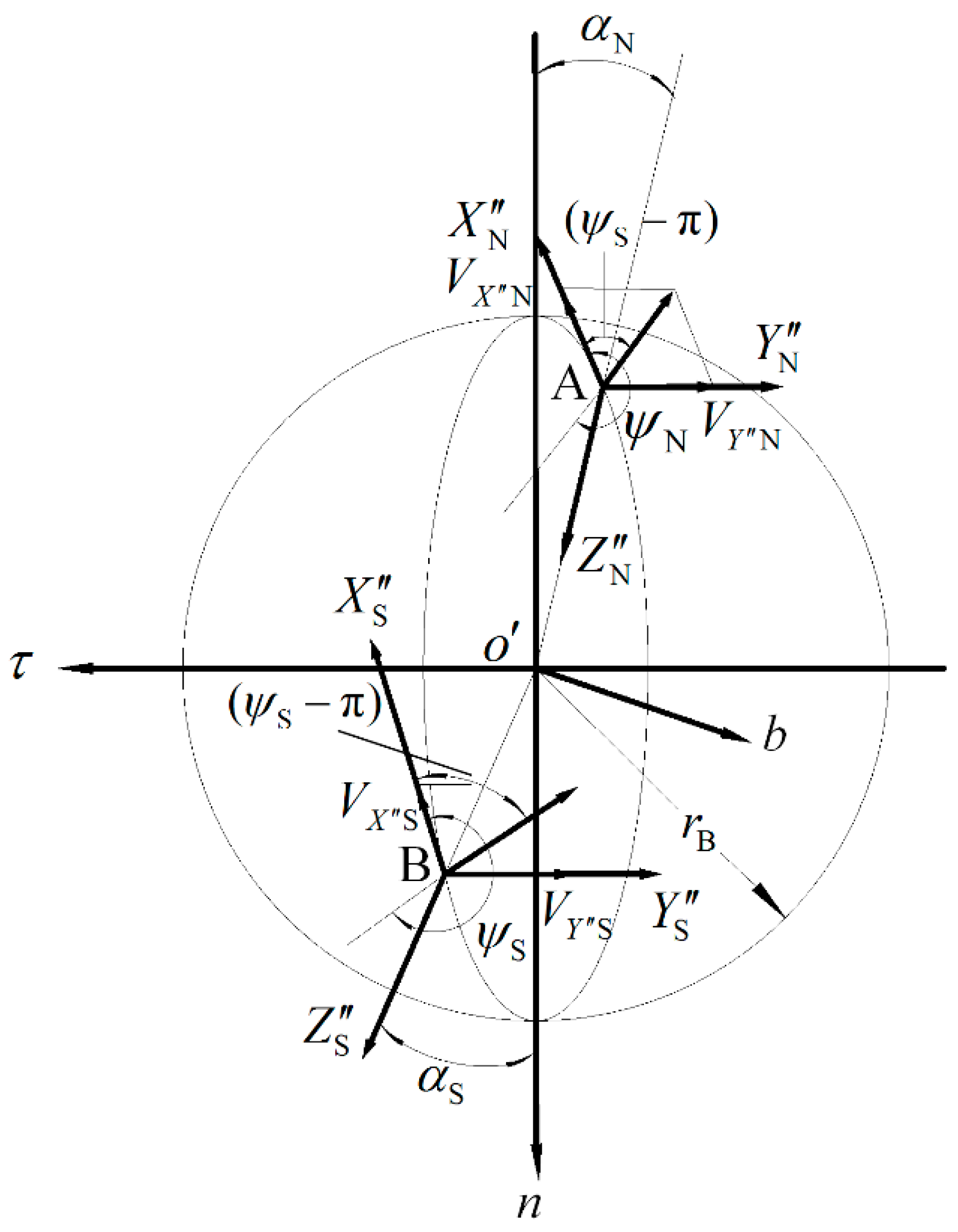
2.1. Setting and Transformation of the Coordinate System
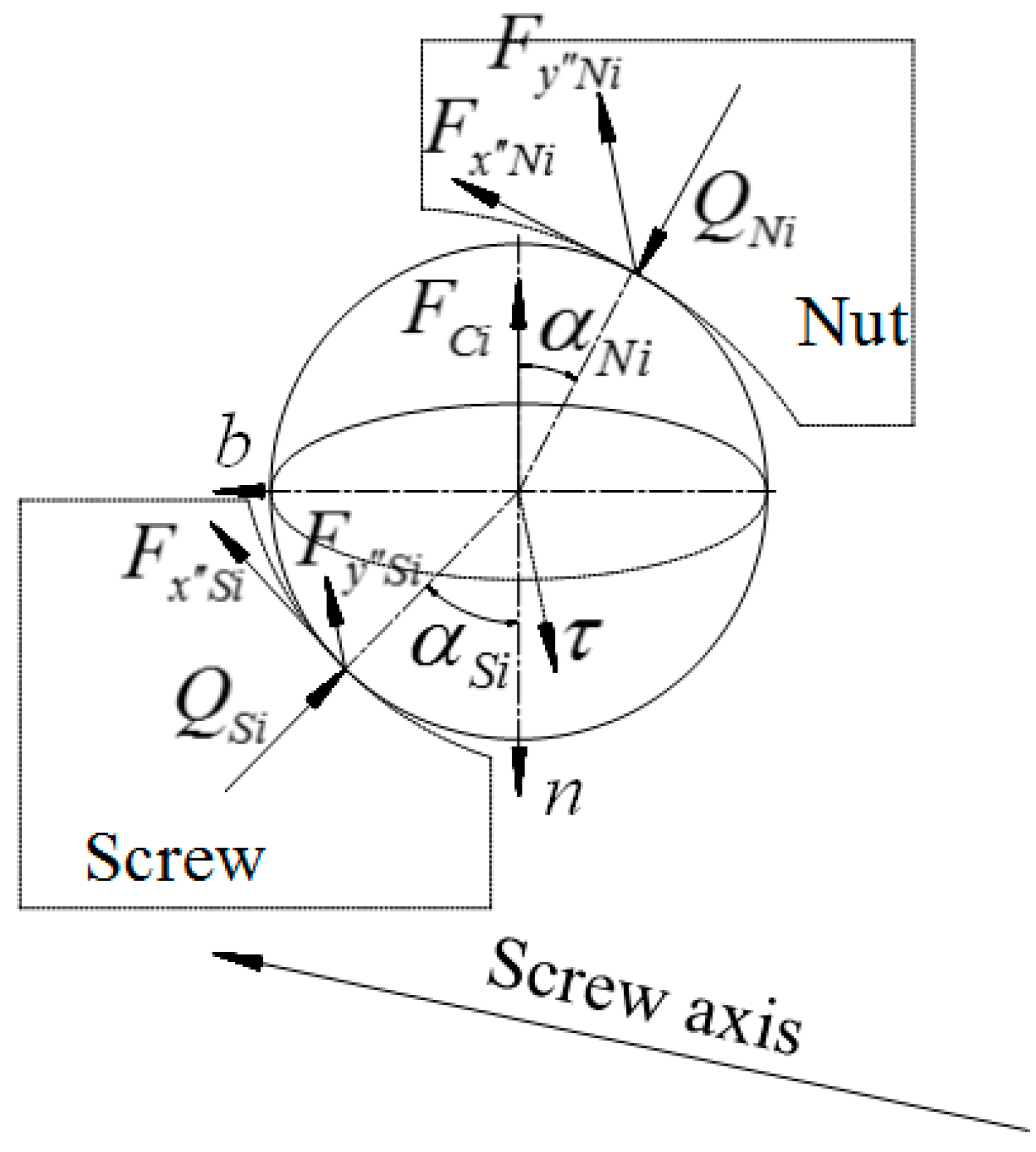
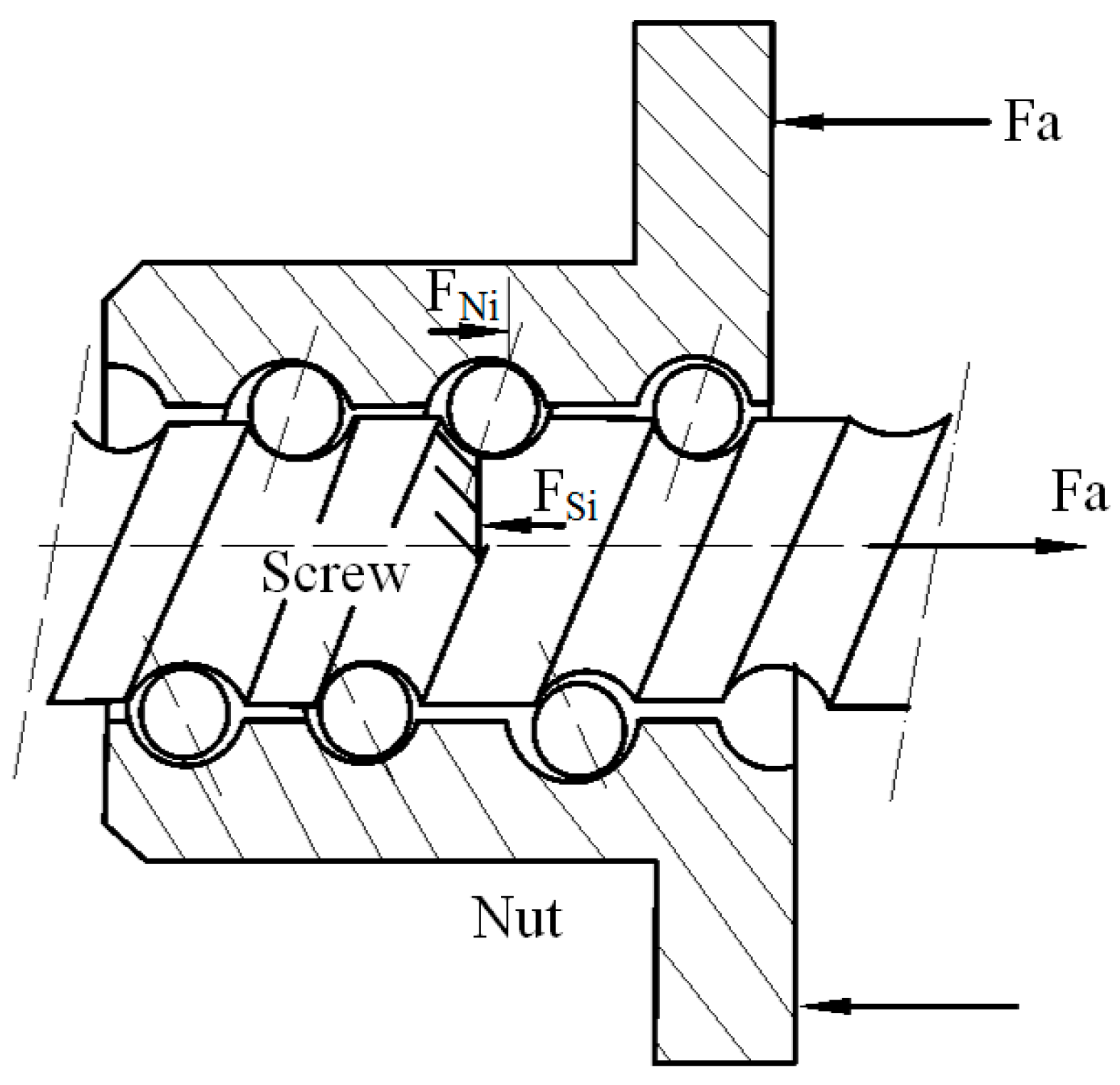
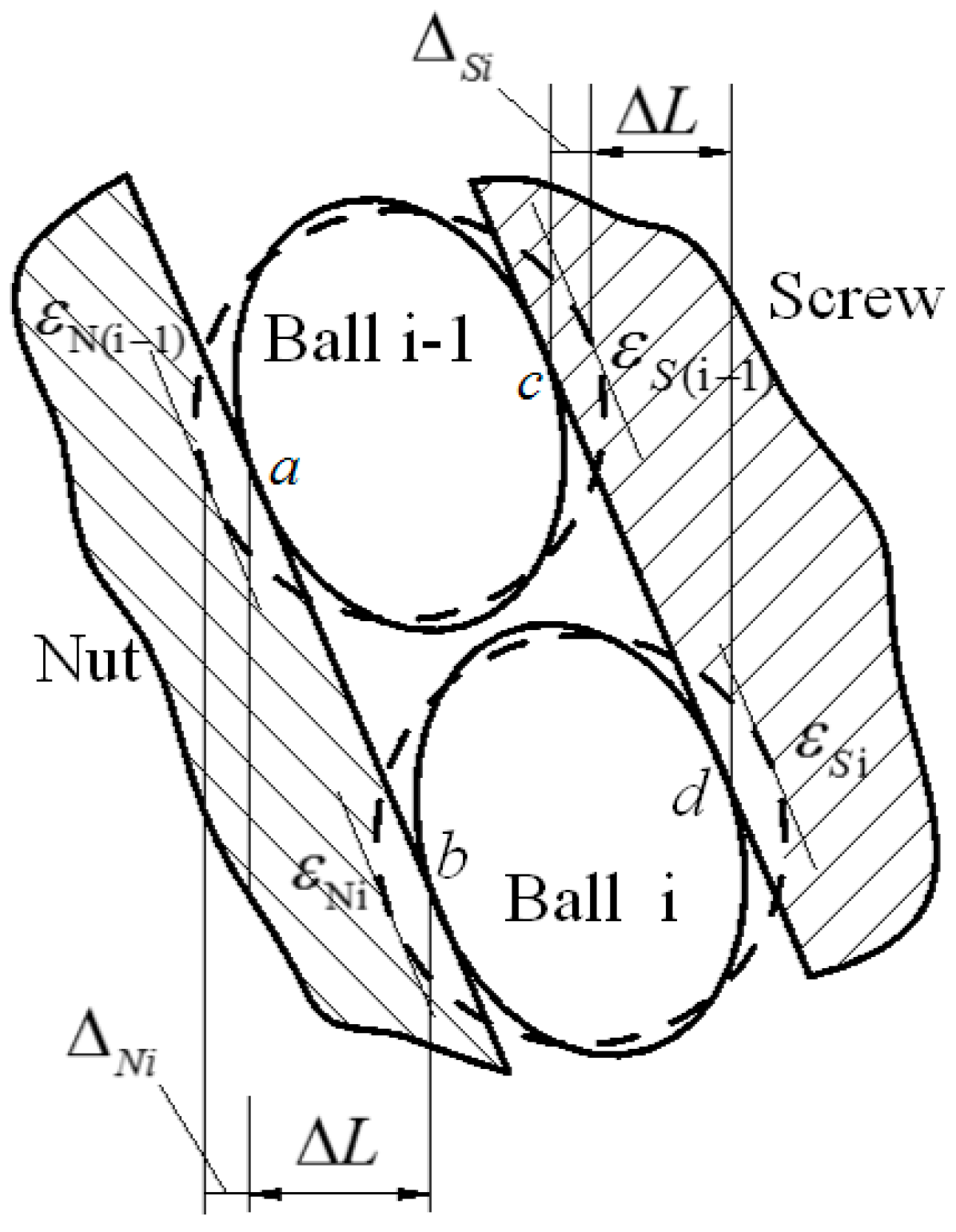
2.2. Dynamic Contact Mechanics Model of SNBSP
2.3. Calculation of the Frictional Force of SNBSP and Other Related Parameters
2.3.1. The Calculation of Ball and Raceway Contact Pair Frictional Force
2.3.2. Calculation of Shear Stress of the Contact Pairs
2.3.3. Calculation of the Contact Pairs Slip Angle
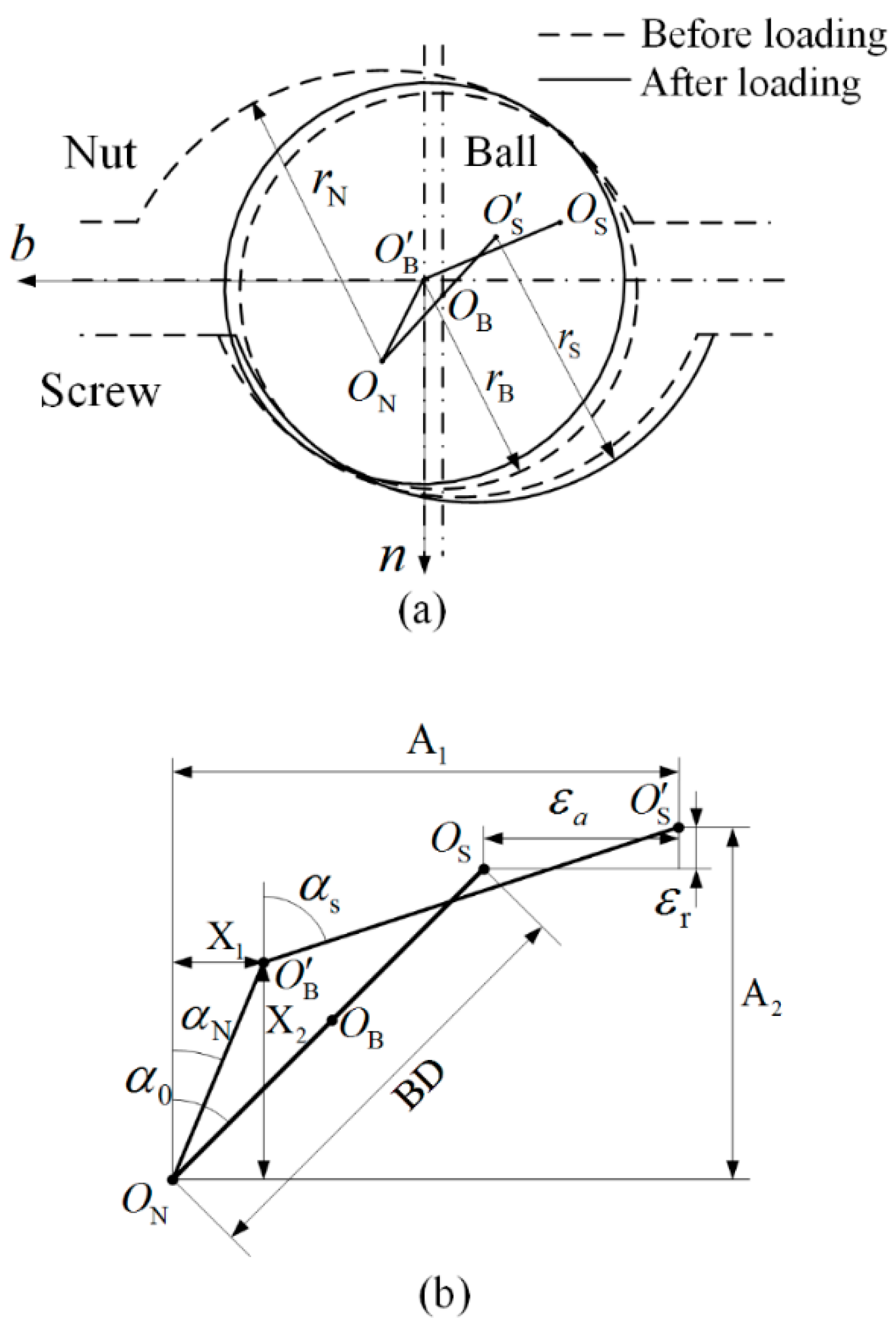
2.4. Dynamic Contact Stiffness Model of SNBSP
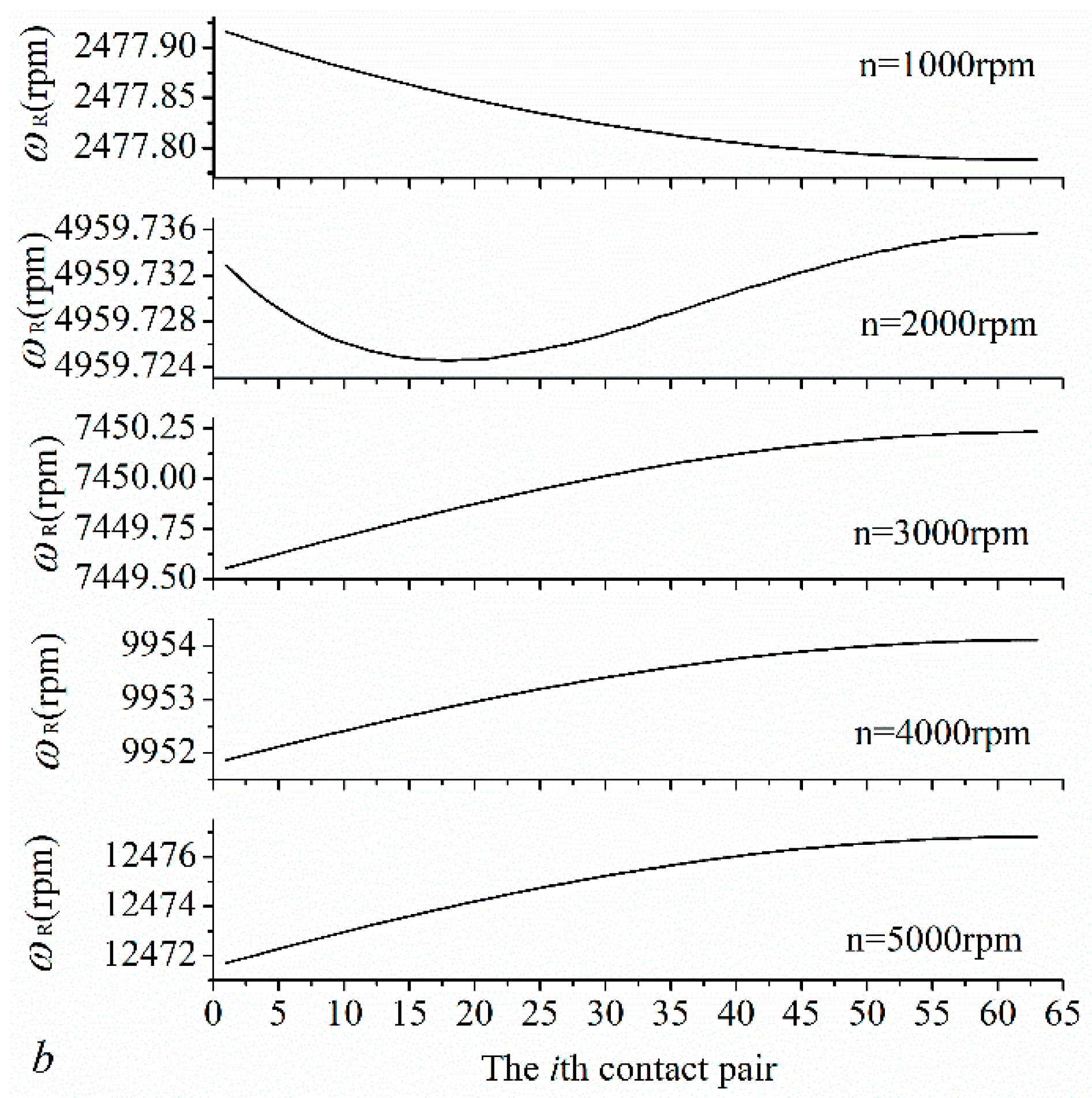
3. Numerical Analysis of Dynamic Contact Characteristics
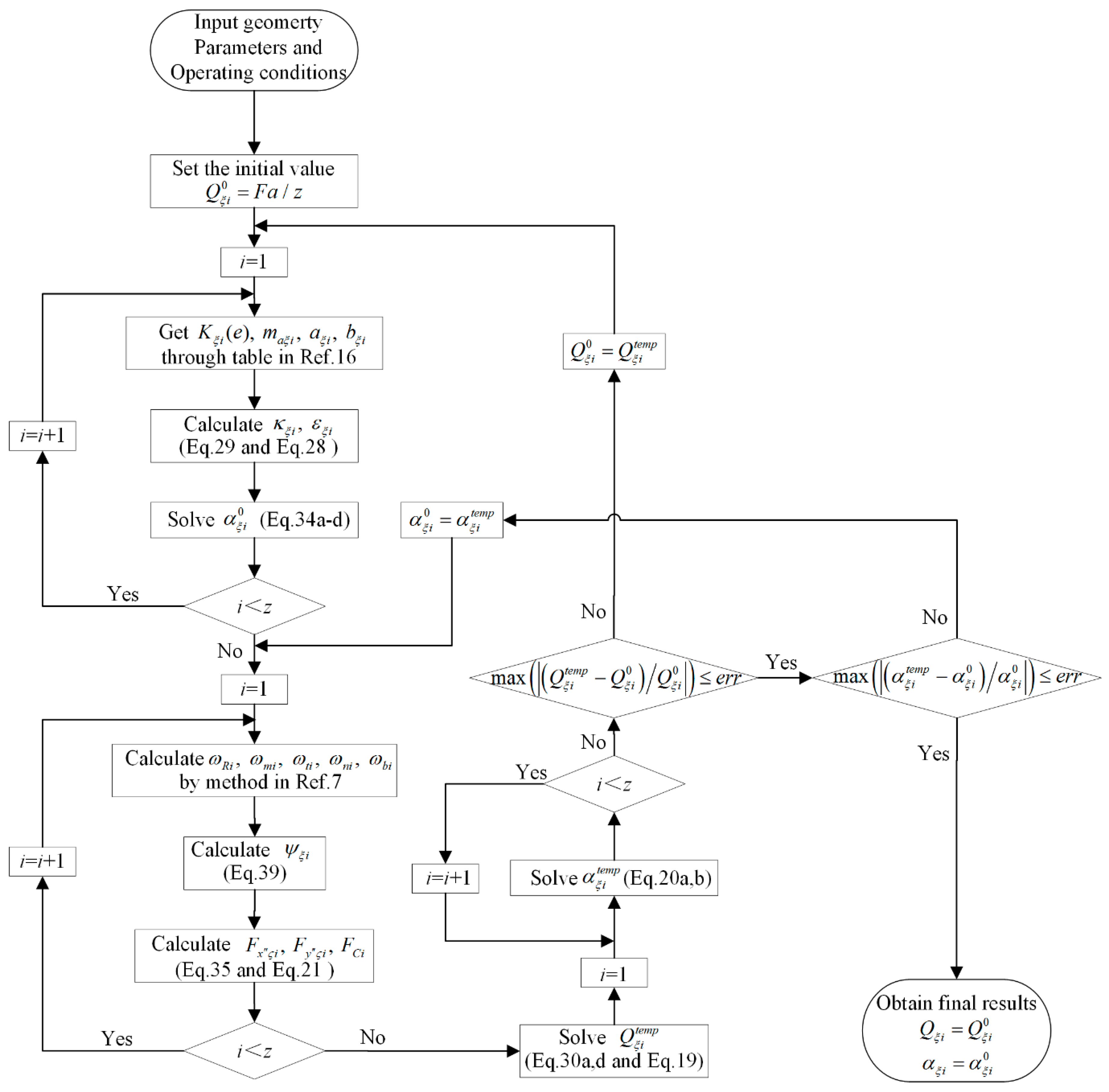
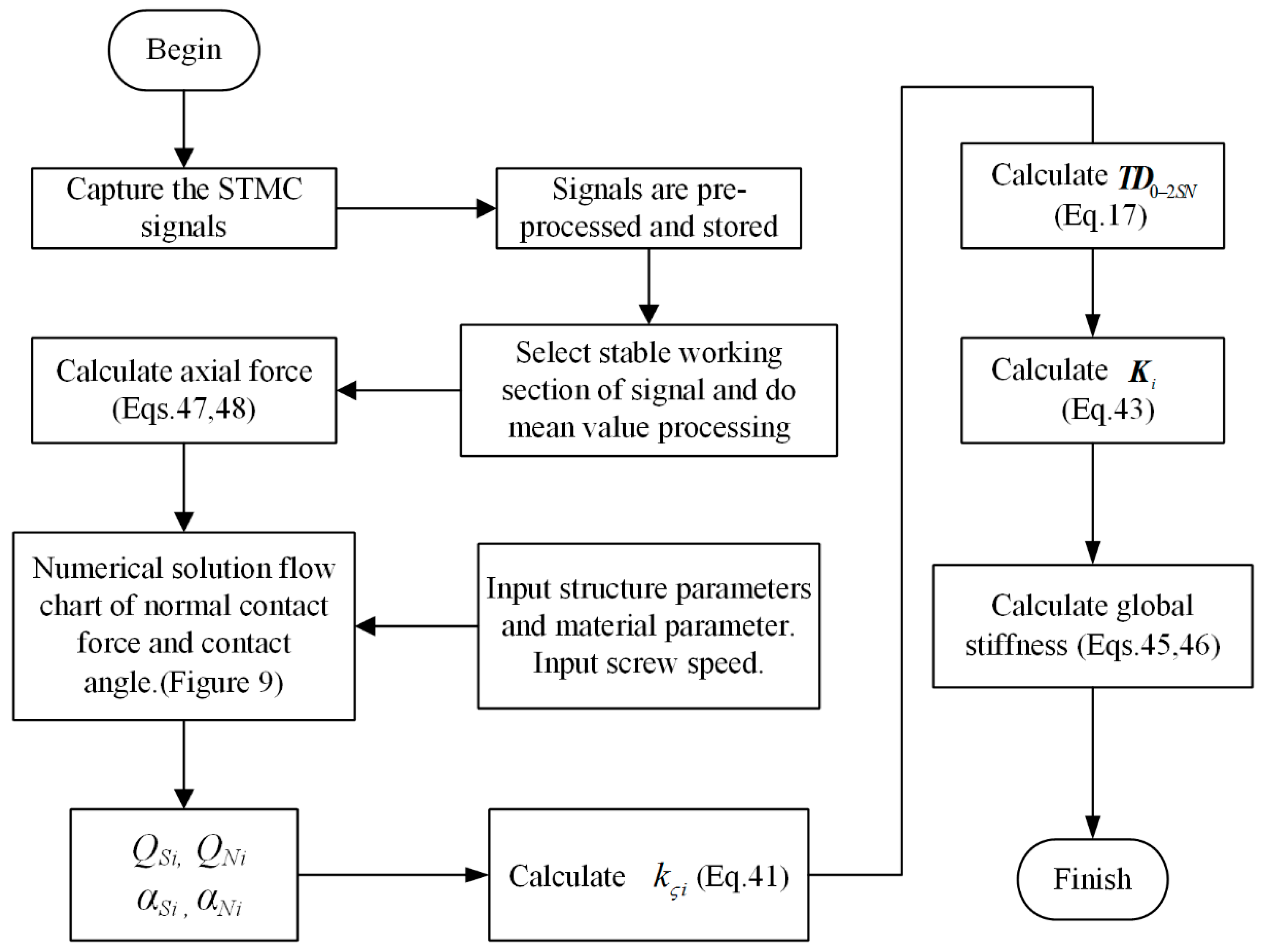
3.1. Flow Chart of Numerical Calculation Method
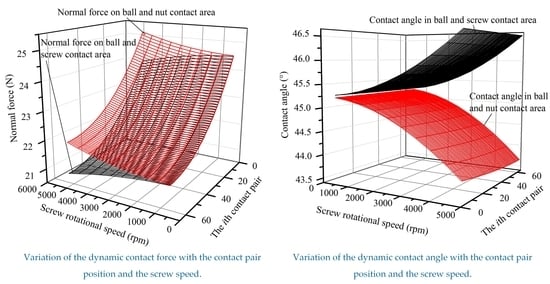
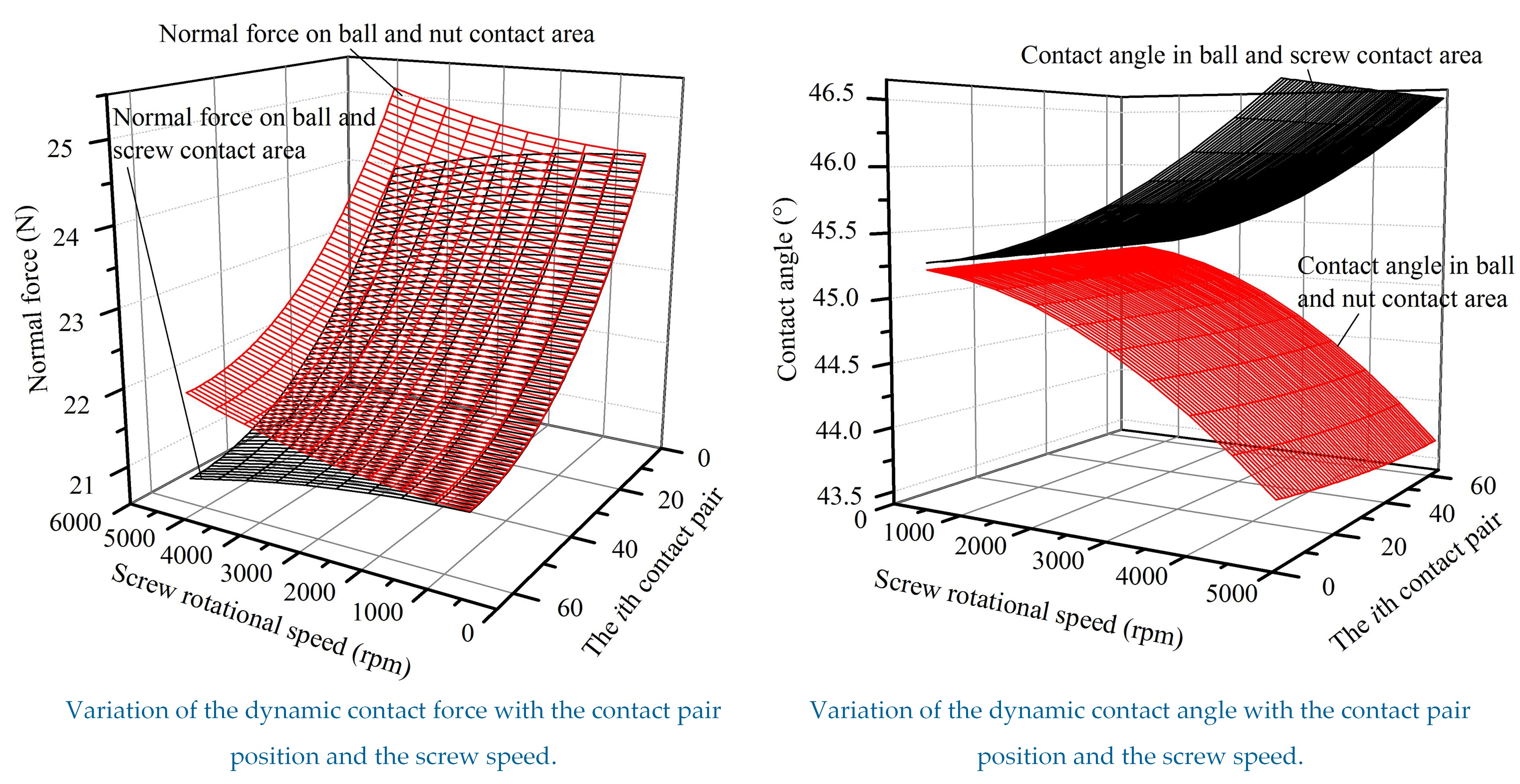
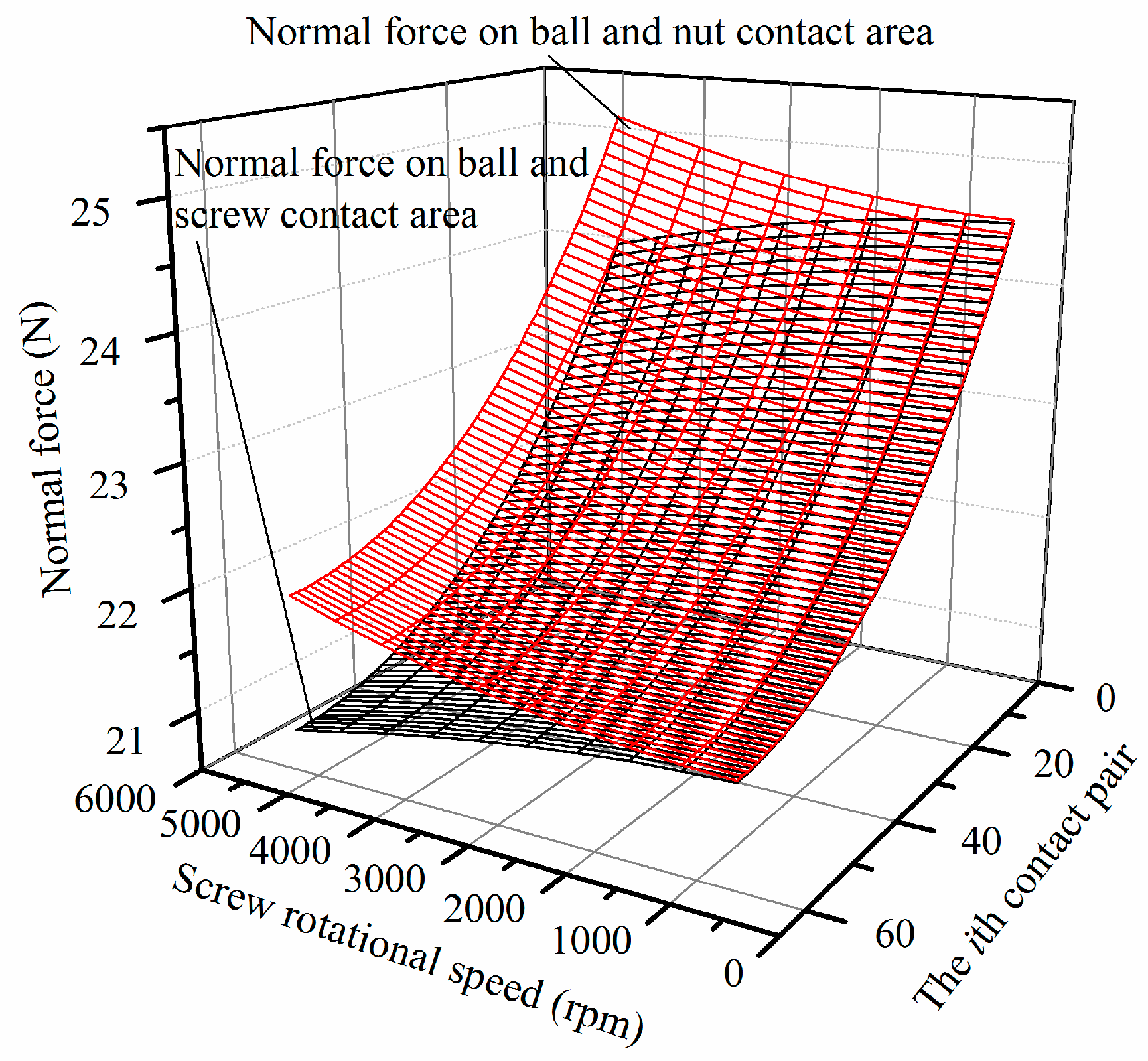
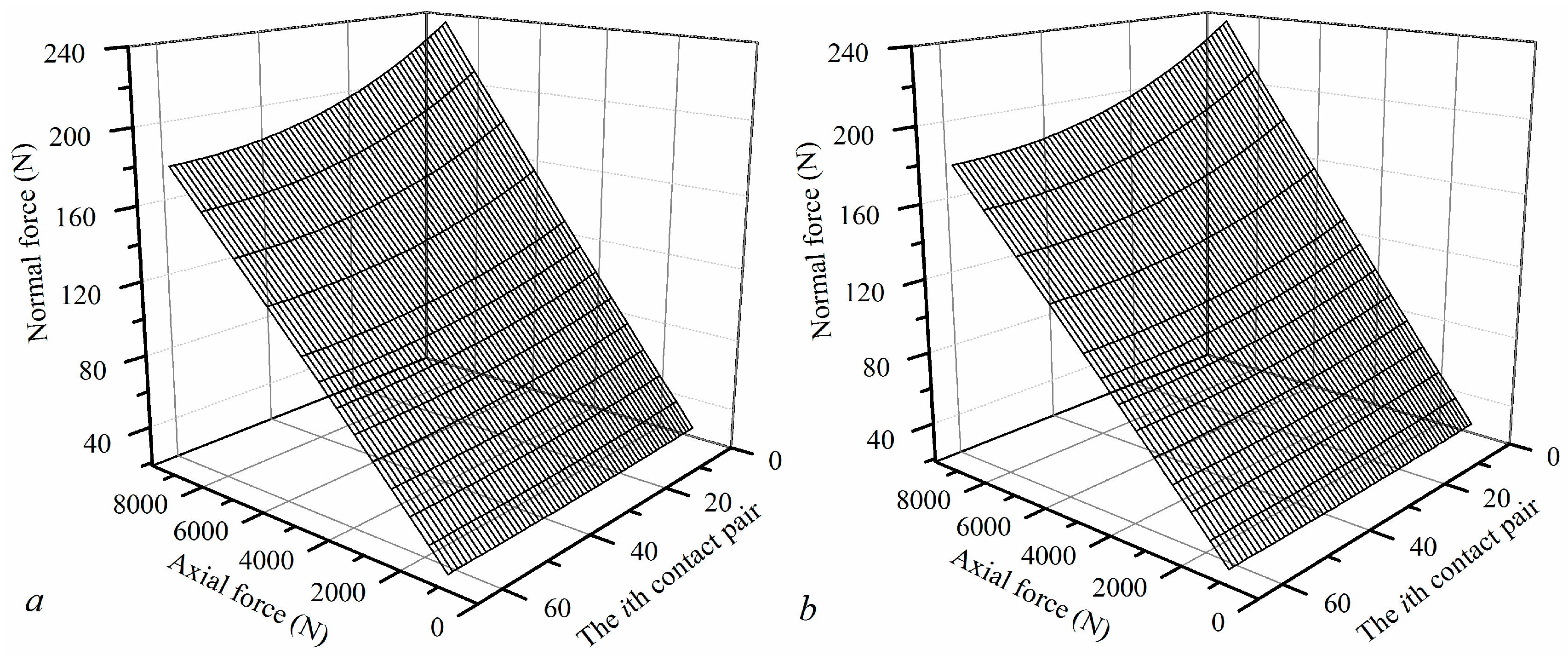
3.2. Variation of Dynamic Contact Normal Force
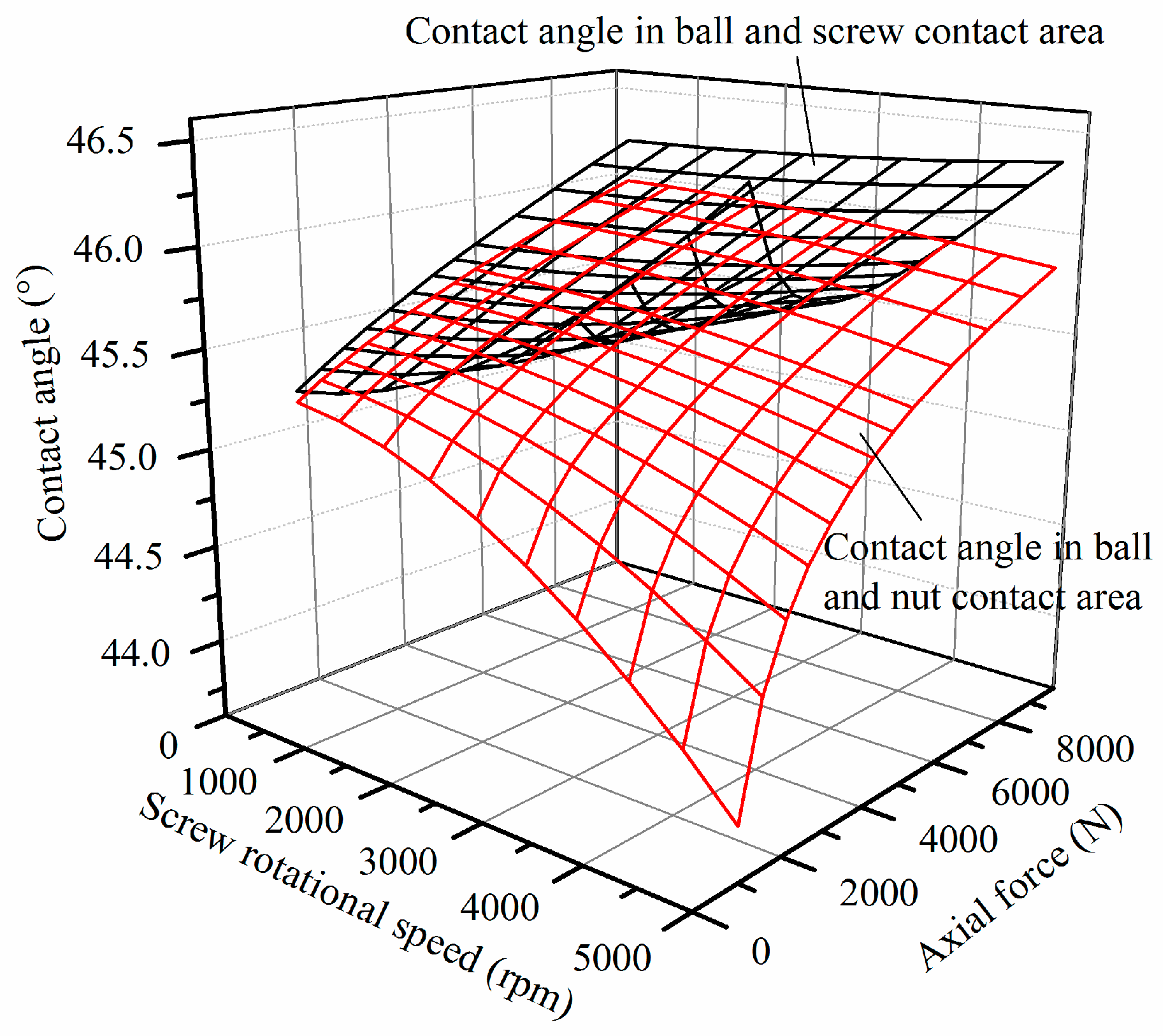
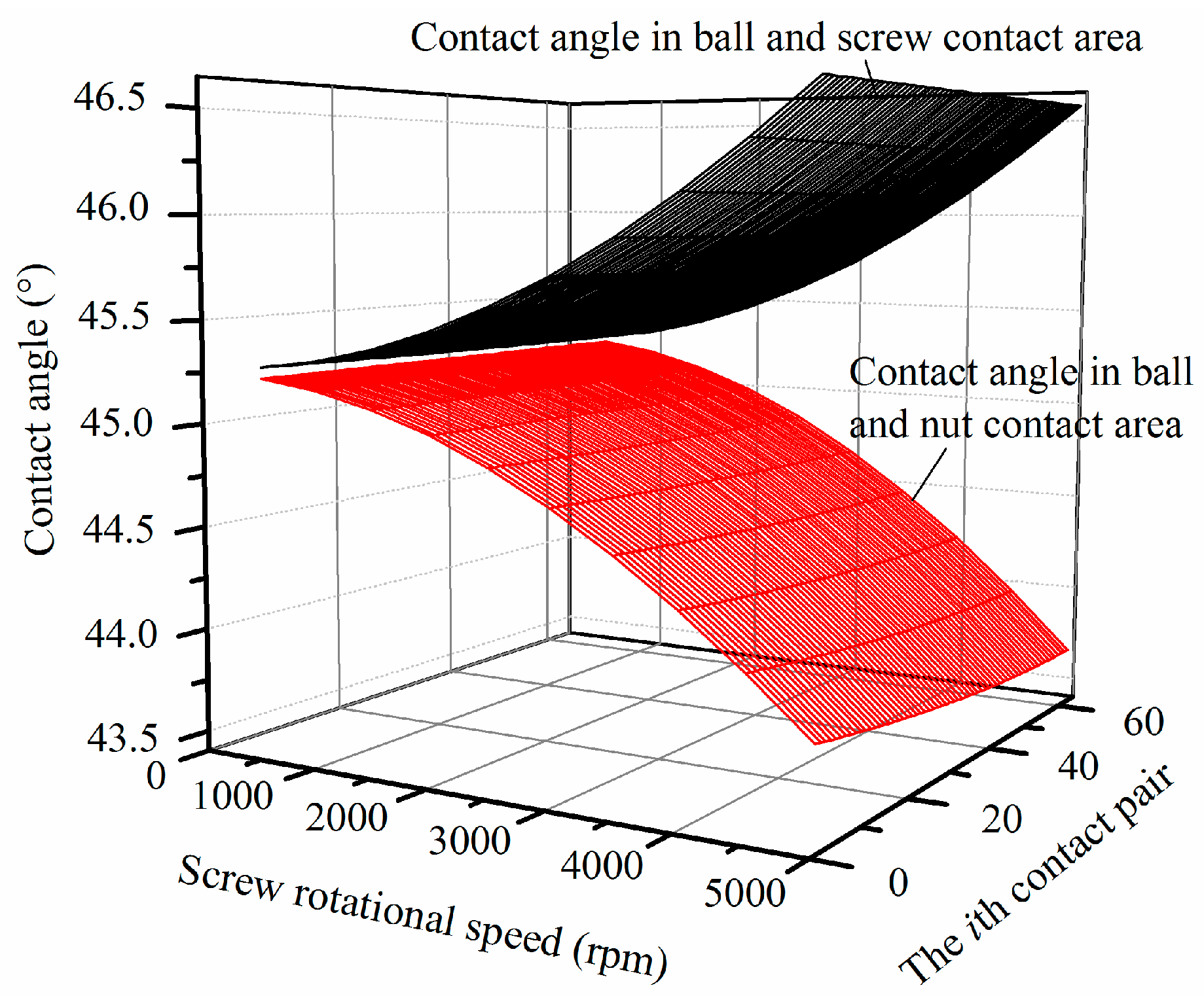
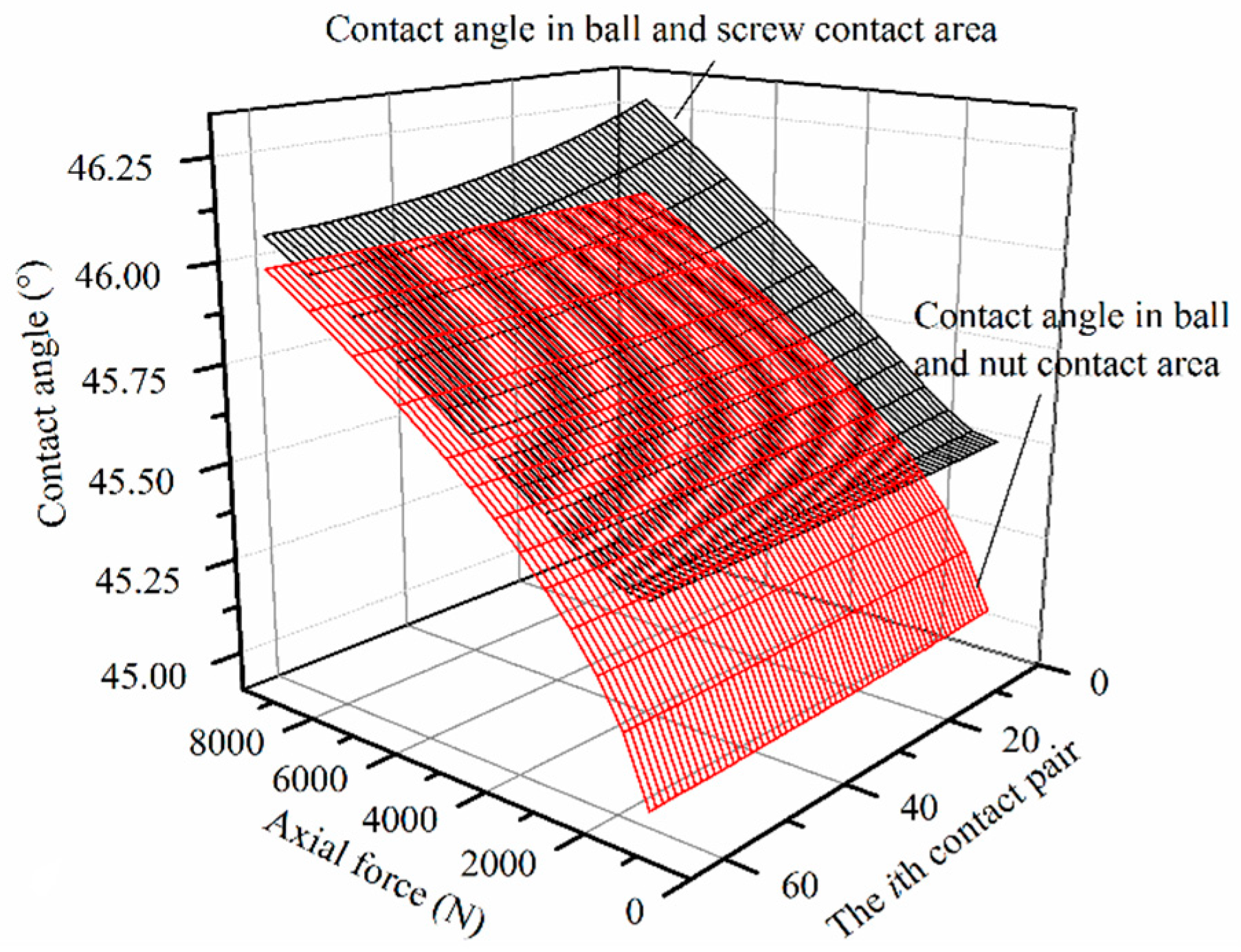
3.3. Variation of Dynamic Contact Angle
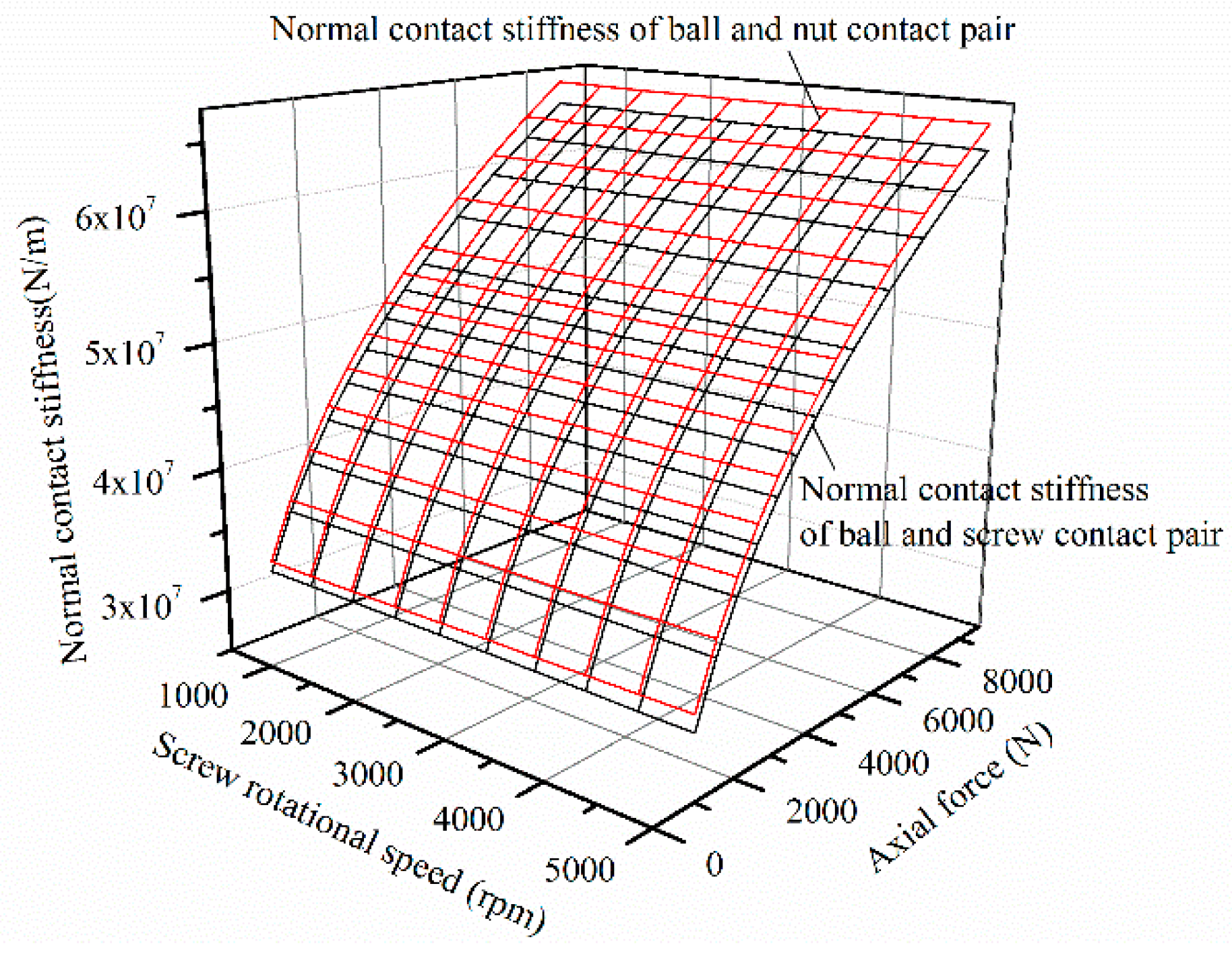
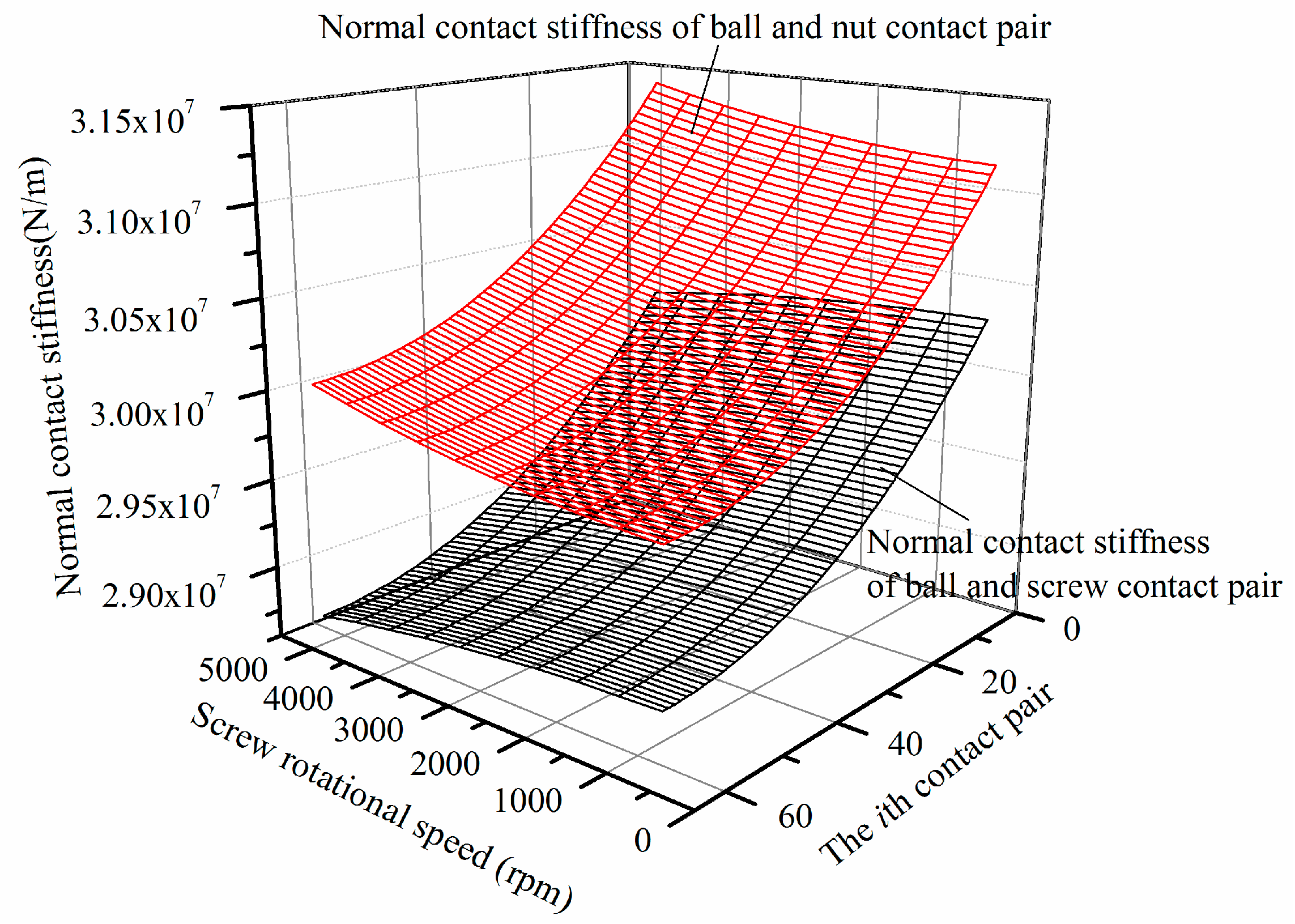
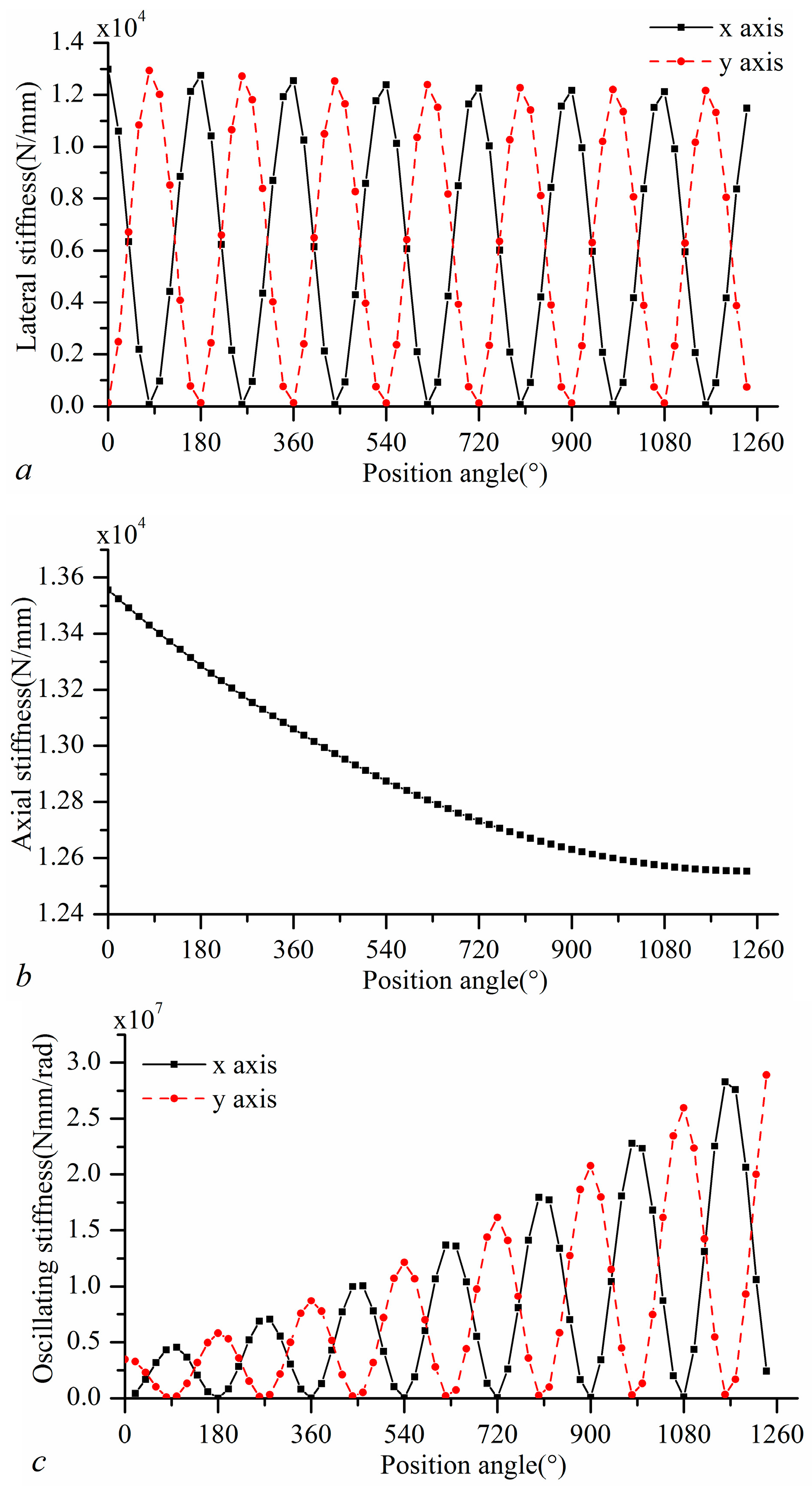
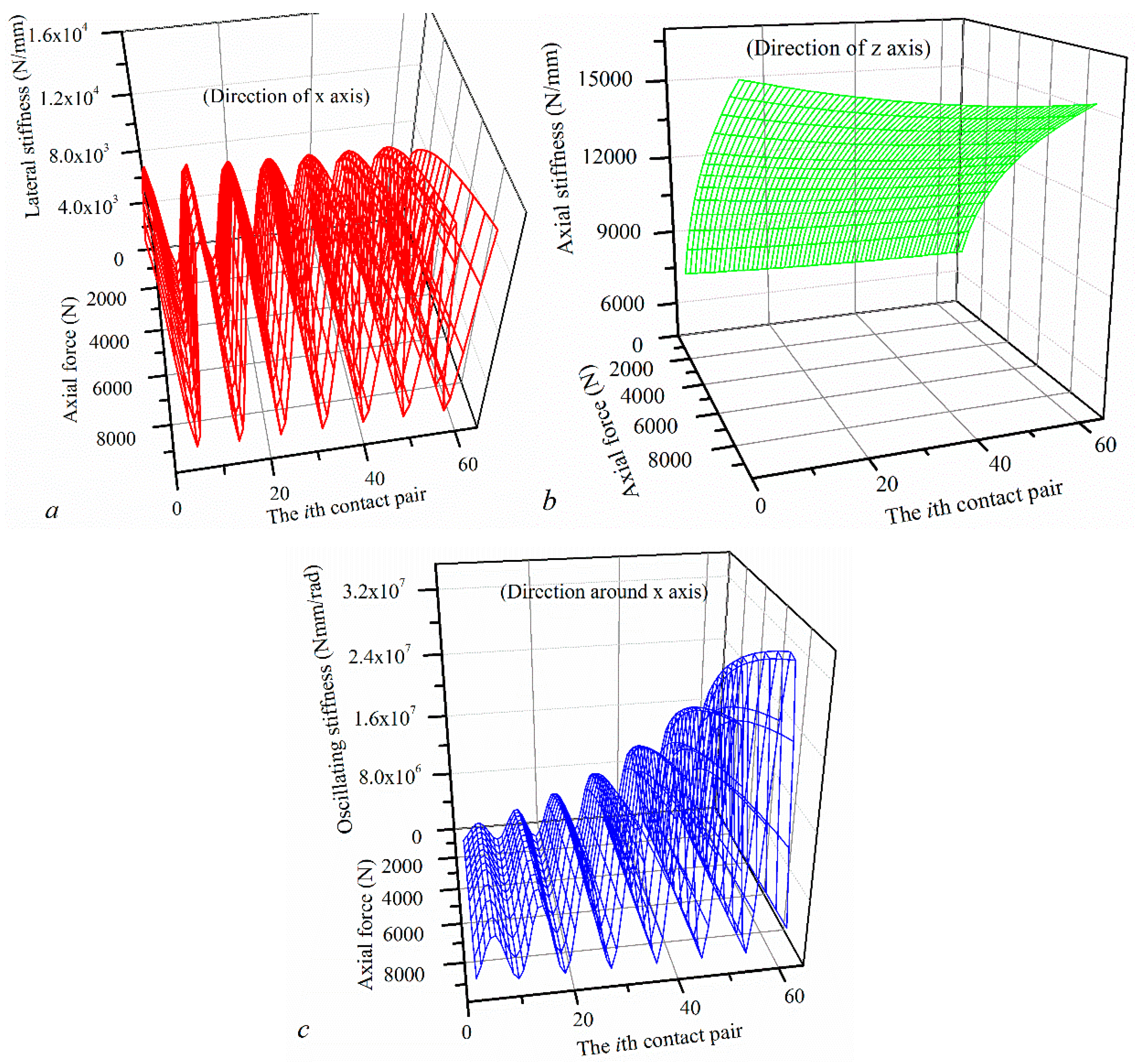
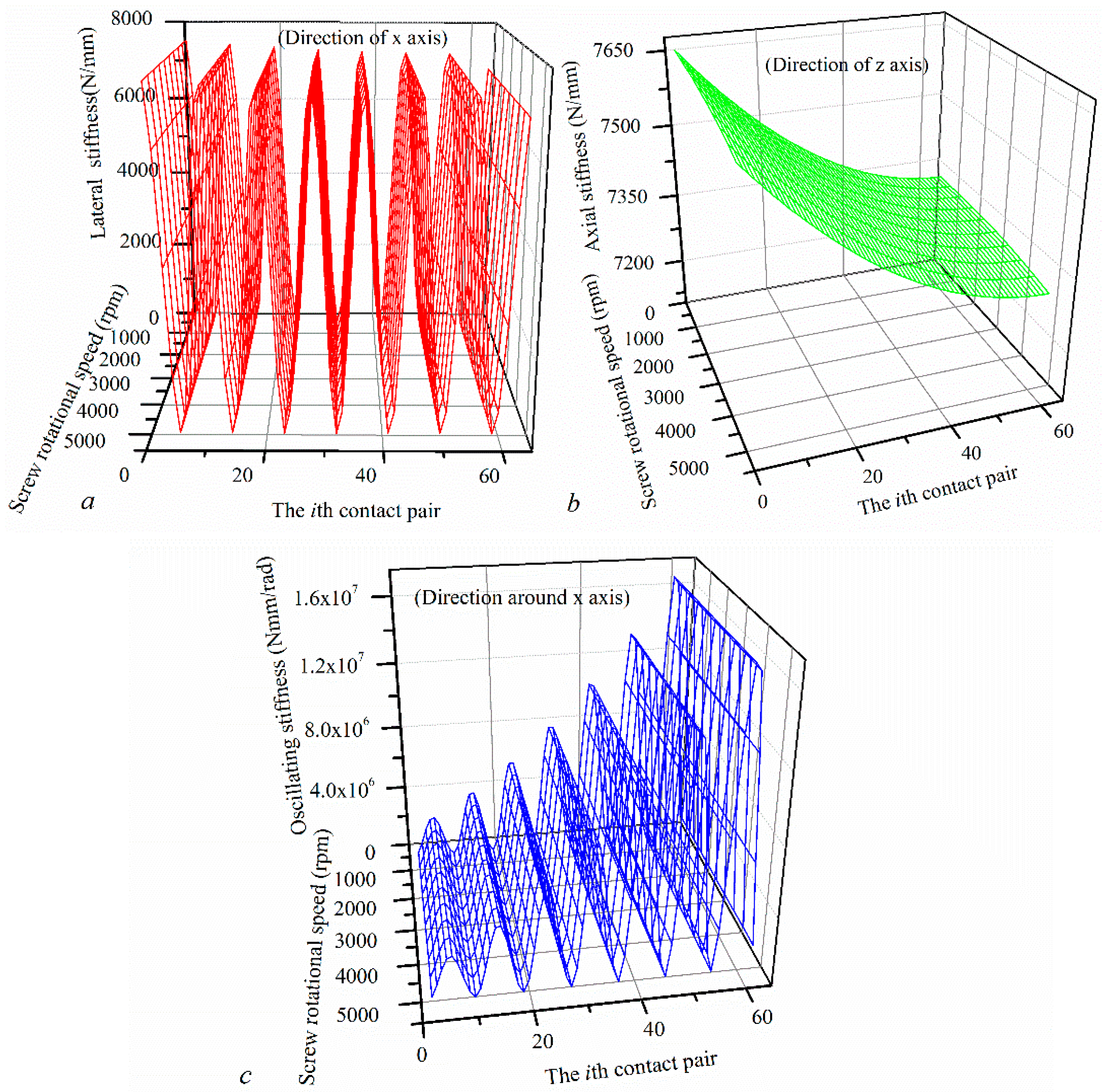
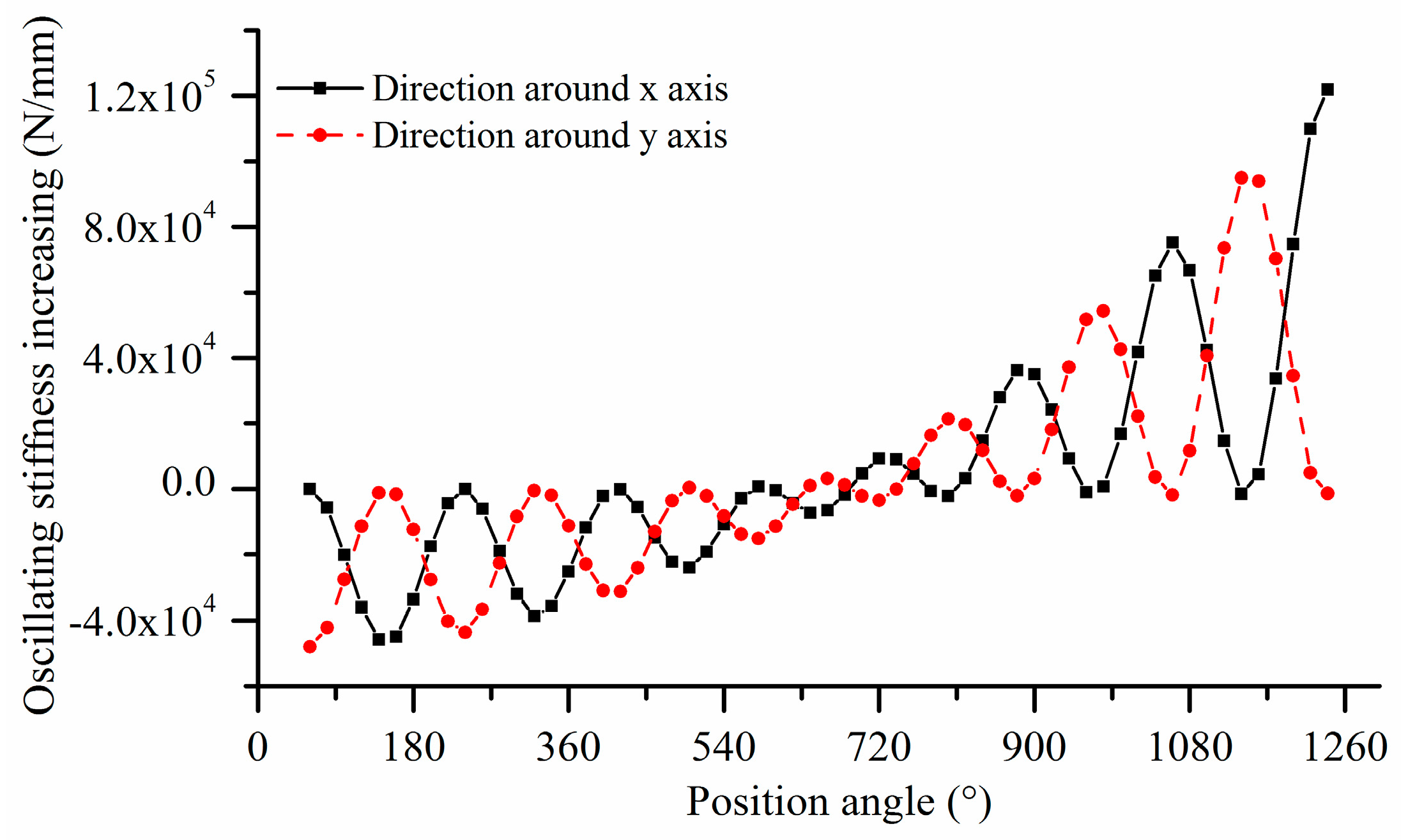
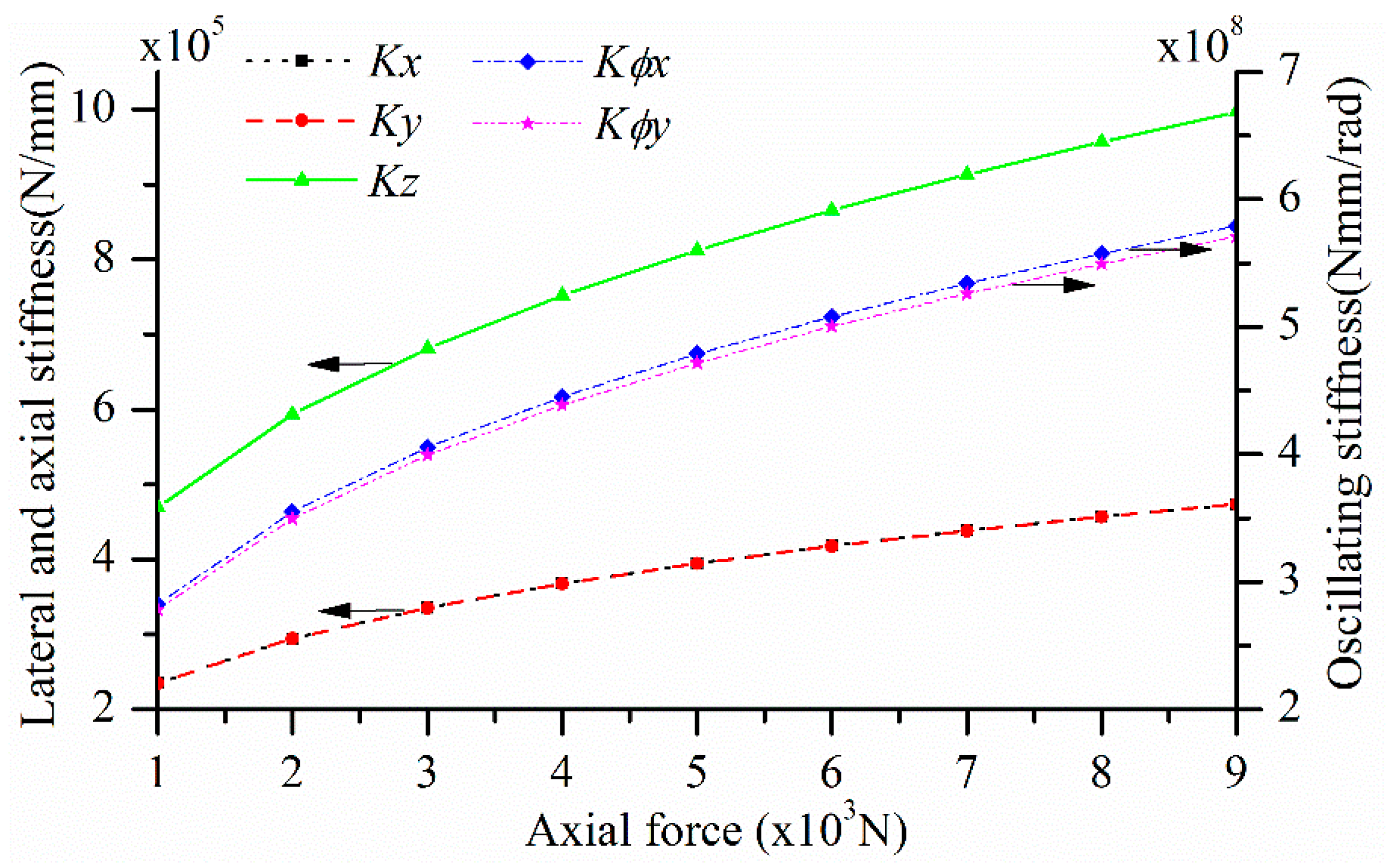
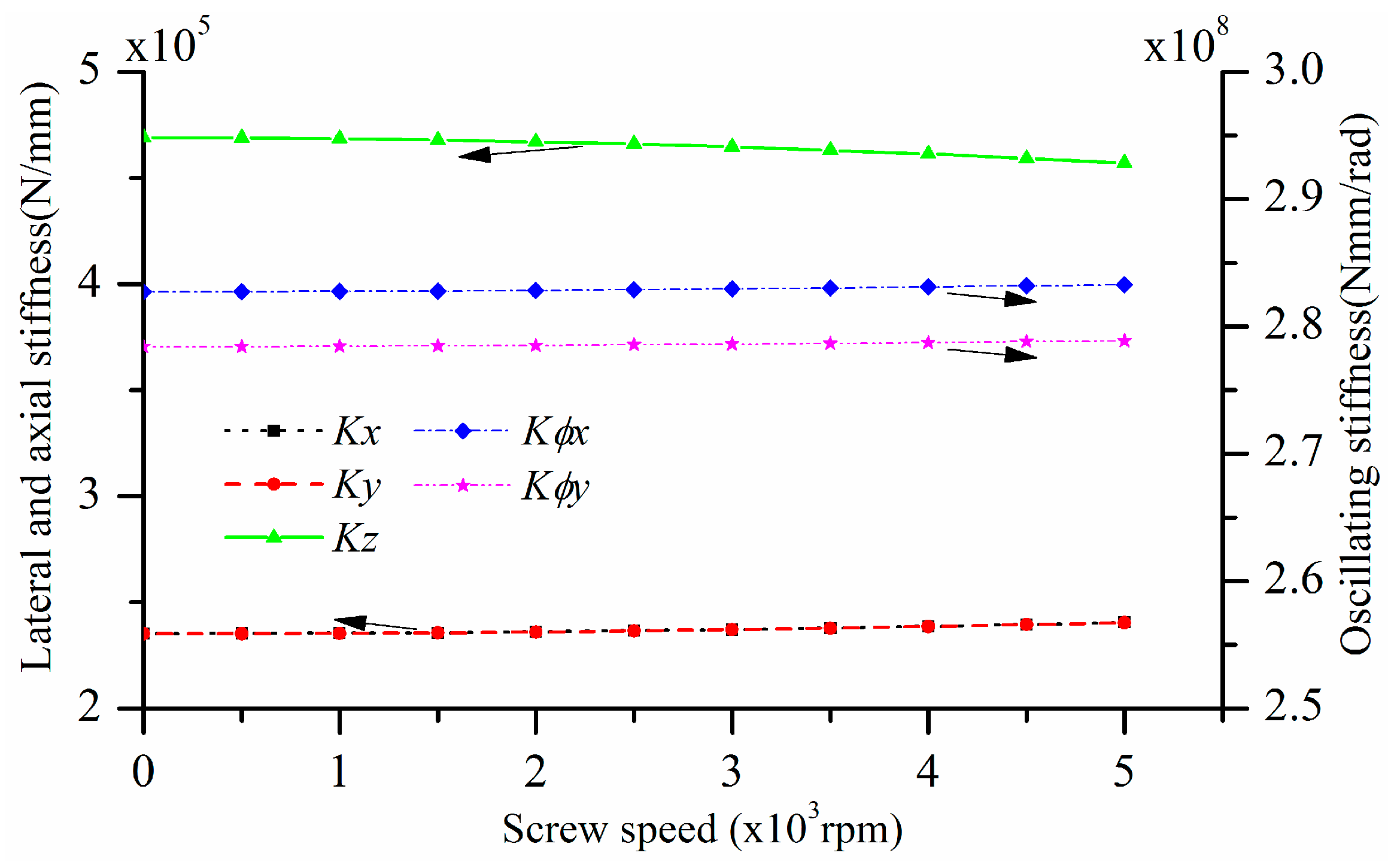
3.4. Variation of Dynamic Contact Stiffness
4. Sensorless Stiffness Estimating Method Based on Contact Stiffness Model and Experimental Verification
4.1. Sensorless Stiffness Estimating Method Based on Contact Stiffness Model
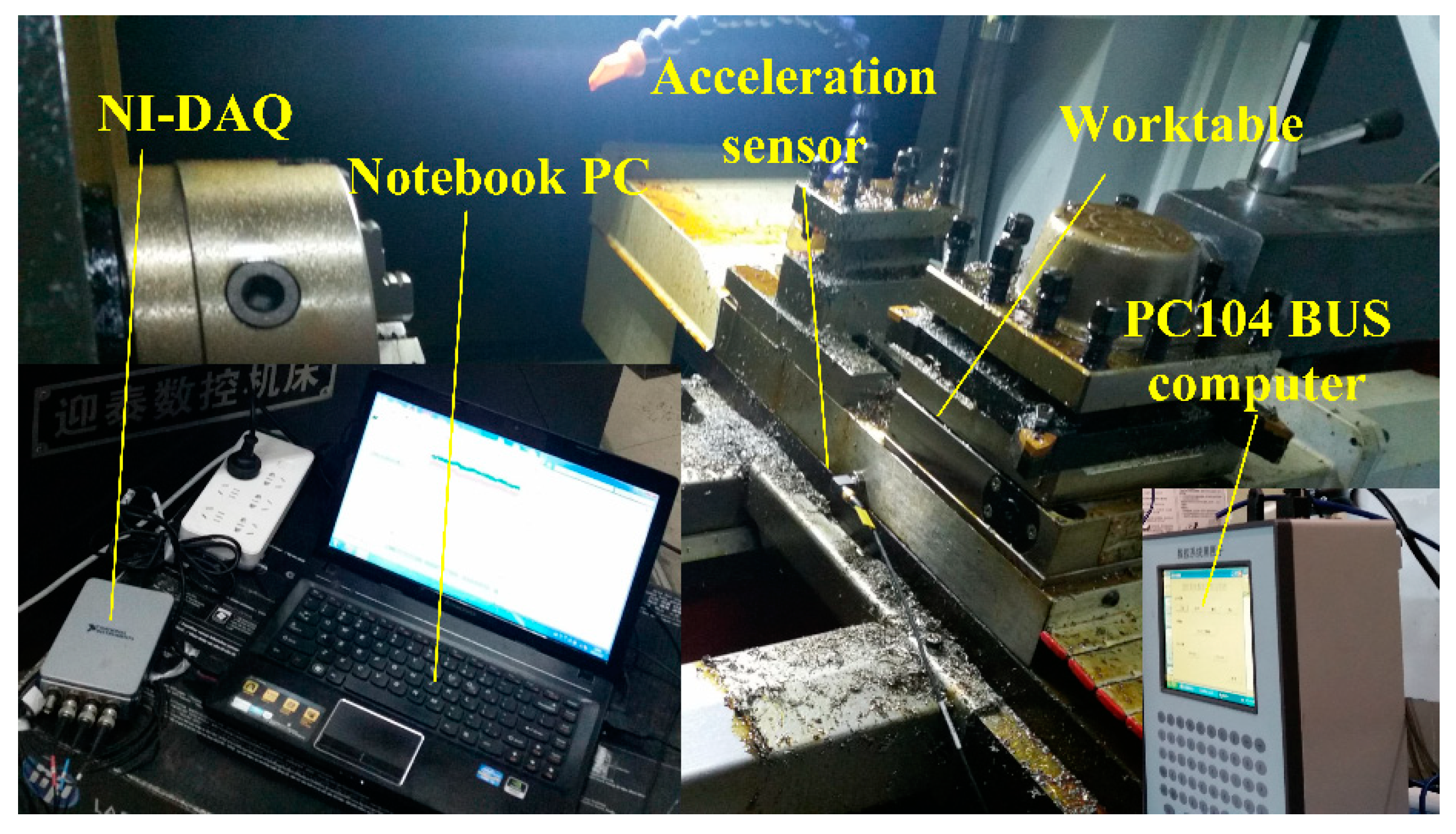
4.2. Experiment
- Step 1: Locate the worktable at the given position Z1 by using a NC program.
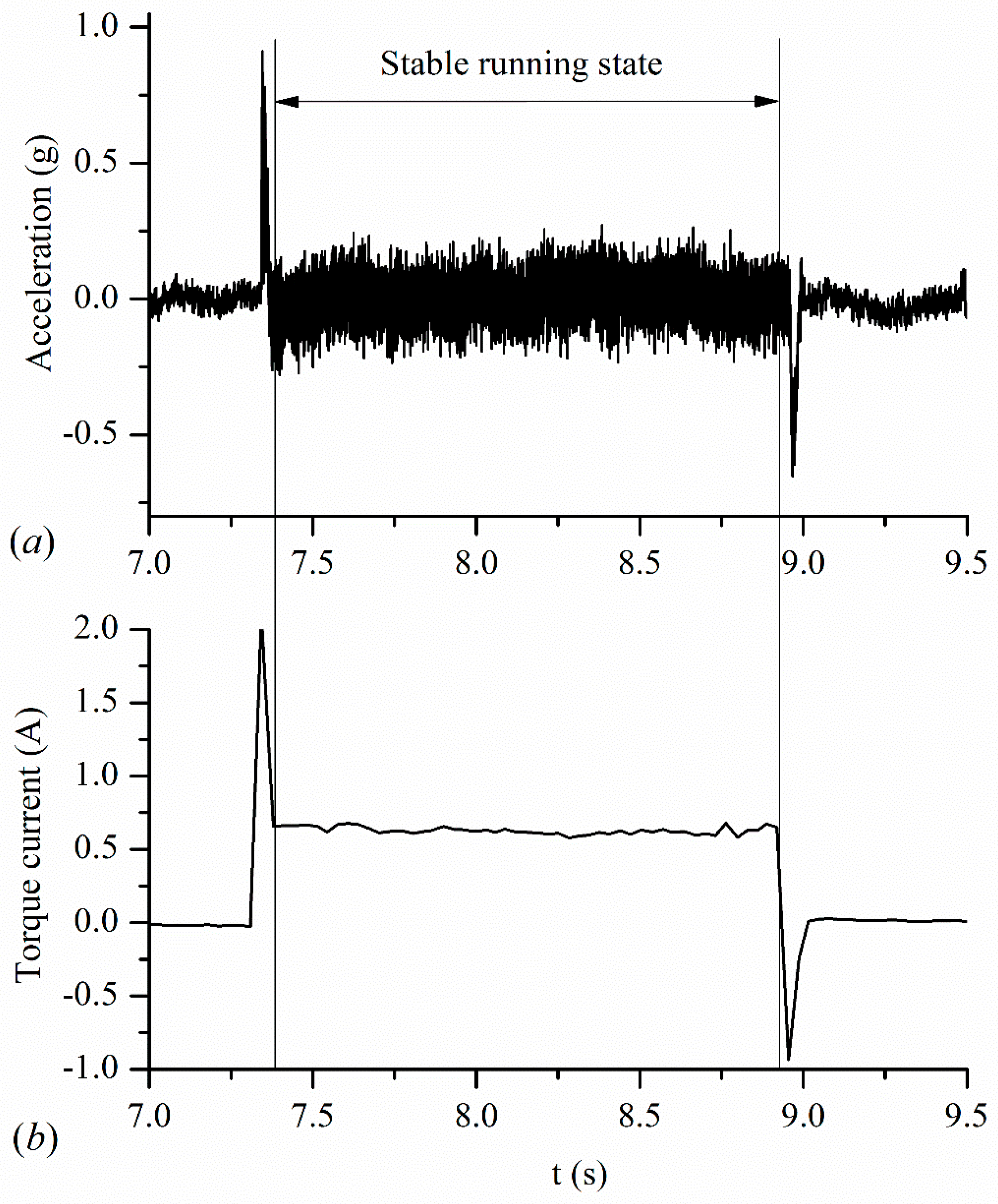
- Step 2: Run acceleration sensor data acquisition program. Run servo axis data acquisition program to capture the TCSM.
- Step 3: Run the NC program. The worktable moves from Z1 to Z0 at the specified speed.
- Step 4: All the application programs are stopped and the data are saved.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Net sectional area of screw or nut | ||
| CS | Rotating coordinate system | |
| CS | Local coordinate system | |
| CS | Contact coordinate system | |
| Diameter of the ball | ||
| Diameter of the screw helix | ||
| ,, | Young modulus of the screw, nut and ball materials | |
| Natural frequency of the feed system | ||
| Frictional coefficient of the ball and screw or ball and nut | ||
| Axial force of single nut ball screw pair | ||
| Centrifugal force generated by the rotation of the ith ball | ||
| , | The load on screw or nut at the ith contact pair | |
| Transverse friction of screw or nut of the ith contact pair | ||
| longitudinal friction of screw or nut of the ith contact pair | ||
| i | Servo motor torque current | |
| Motor constant of the servo motor | ||
| Normal contact stiffness between the ith ball and the raceway | ||
| Complete elliptic integral of the first kind | ||
| Axial stiffness of fixed end bearing | ||
| Stiffness of feed system | ||
| Contact stiffness of the ith ball contacting with screw and nut raceway in CS | ||
| Axial stiffness of screw-nut pair | ||
| , | Axial stiffness of screw shaft on both sides of the nut | |
| , | Global lateral stiffness | |
| Global axial stiffness | ||
| , | Global oscillating stiffness | |
| , | Distance from the nut to the of the two fixed end | |
| Lp | Lead of screw | |
| Mass of the ball | ||
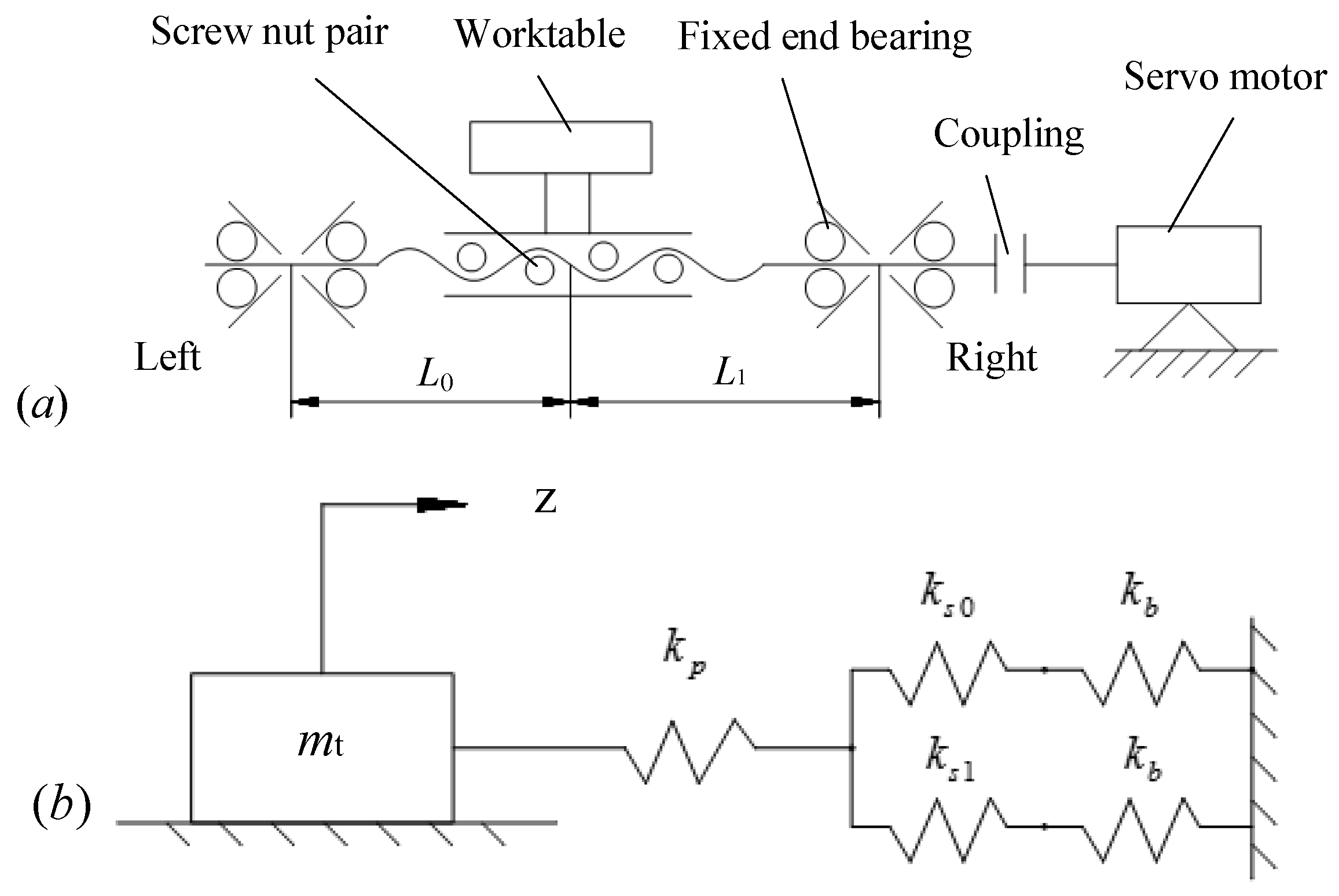
| mt | Worktable mass | |
| Hertz contact pressure on the contact area of the ball and screw or ball and nut | ||
| Normal contact force of screw or nut of the ith contact pair | ||
| Pitch radius of ball screw | ||
| Radius of ball | ||
| Curvature radius coefficient of inner and outer raceways | ||
| transformation matrix between CS and CS | ||
| Transformation matrix between CS and CS | ||
| Homogeneous coordinate differential transformation matrix of CS and CS. | ||
| Transformation matrix between CS and CS | ||
| Homogeneous coordinate differential transformation matrix of CS and CS | ||
| Torque of the screw-nut driving the z-axis worktable | ||
| Theoretical value of total input torque. | ||
| Theoretical value of input torque at the ith ball | ||
| , | Component of the relative slip speed of the ball and screw or ball and nut in the direction of axis and axis | |
| The output work | ||
| Initial contact angle | ||
| Contact angle of screw or nut of the ith contact pair | ||
| Axial distance between adjacent balls | ||
| Position angle of the ball | ||
| Lead angle of ball screw | ||
| ,, | Poisson ratio of screw, nut and ball | |
| Friction angle between ith ball and screw | ||
| Summation of principal curvatures of ball and screw, ball and nut | ||
| Shear stresses of the ball and screw or ball and nut | ||
| Slip angle formed at the contact surface between ball and screw or ball and nut | ||
| Angular velocity of ball revolution along the screw helix of the ith ball | ||
| Ball’s spinning angle velocity | ||
| , | Component of the angular velocity of ball rolling in the direction of t-, n- and b- axis in CS | |
| Subscripts | ||
| When , it denotes that the parameter at this time is the screw parameter; when , it denotes that it is the nut parameter | ||
Appendix A
Calculation Method of Transmission Efficiency

References
- Frey, S.; Walther, M.; Verl, A. Periodic variation of preloading in ball screws. Prod. Eng. Res. Devel. 2010, 4, 261–267. [Google Scholar] [CrossRef]
- Shimoda, H.; Ando, Y.; Izawa, M. Study on the Load Distribution in the Ball Screw (1st Report). Manu. Tech. 1975, 41, 954–959. [Google Scholar] [CrossRef]
- Bertolaso, R.; Cheikh, M.; Barranger, Y.; Dupre, J.C.; Germaneau, A.; Doumalin, P. Experimental and numerical study of the load distribution in a ball-screw system. J. Mech. Sci. Technol. 2014, 28, 1411–1420. [Google Scholar] [CrossRef]
- Huang, H.T.T.; Ravani, B. Contact stress analysis in ball screw mechanism using the tubular medial axis representation of contacting surfaces. Physiol. Biochem. Zool. 1997, 119, 374–383. [Google Scholar] [CrossRef]
- Lin, M.C.; Ravani, B.; Velinsky, S.A. Kinematics of the ball screw mechanism. J. Mech. Design 1994, 116, 849–855. [Google Scholar] [CrossRef]
- Lin, M.C.; Velinsky, S.A.; Ravani, B. Design of the Ball Screw Mechanism for Optimal Efficiency. J. Mech. Design 1994, 116, 856–861. [Google Scholar] [CrossRef]
- Wei, C.C.; Lin, J.F. Kinematic Analysis of the Ball Screw Mechanism Considering Variable Contact Angles and Elastic Deformations. J. Mech. Design 2003, 125, 717–733. [Google Scholar] [CrossRef]
- Xu, N.; Tang, W.; Chen, Y.; Bao, D.; Guo, Y. Modeling analysis and experimental study for the friction of a ball screw. Mech. Mach. Theory 2015, 87, 57–69. [Google Scholar] [CrossRef]
- Chen, Y.; Tang, W. Dynamic contact stiffness analysis of a double-nut ball screw based on a quasi-static method. Mech. Mach. Theory 2014, 73, 76–90. [Google Scholar] [CrossRef]
- Okwudire, C.E.; Altintas, Y. Hybrid Modeling of Ball Screw Drives With Coupled Axial, Torsional, and Lateral Dynamics. J. Mech. Design 2009, 131, 70102. [Google Scholar] [CrossRef]
- Wu, Q.; Rui, Z.; Yang, J. The Stiffness Analysis and Modeling Simulation of Ball Screw Feed System. Adv. Mater. Res. 2010, 97–101, 2914–2920. [Google Scholar] [CrossRef]
- Chen, Y.; Zhao, C.; Zhang, S.; Meng, X. Analysis on load distribution and contact stiffness of single-nut ball screw based on the whole rolling elements model. Trans. Can. Soc. Mech. Eng. 2019, 43, 344–365. [Google Scholar] [CrossRef]
- Chen, L.; Wang, Y. Basic Dynamics of Multi-Rigid Body; Press of Harbin Engineering University: Harbin, China, 1995; pp. 45–50. [Google Scholar]
- You, H.; Zhu, C.; Li, W. Contact analysis on large negative clearance four-point contact ball bearing. Procedia Eng. 2012, 37, 174–178. [Google Scholar] [CrossRef]
- Wang, H.; Han, Q.; Zhou, D. Output torque modeling of control moment gyros considering rolling element bearing induced disturbances. Mech. Syst. Signal Proc. 2019, 115, 188–212. [Google Scholar] [CrossRef]
- Greenwood, J.A. Analysis of elliptical Hertzian contacts. Tribol. Int. 1997, 30, 235–237. [Google Scholar] [CrossRef]
- Wang, H.; Han, Q.; Zhou, D. Nonlinear dynamic modeling of rotor system supported by angular contact ball bearings. Mech. Syst. Signal Proc. 2017, 85, 16–40. [Google Scholar] [CrossRef]
- Wang, H.; Han, Q.; Luo, R.; Qing, T. Dynamic modeling of moment wheel assemblies with nonlinear rolling bearing supports. J. Sound Vib. 2017, 406, 124–145. [Google Scholar] [CrossRef]
- Hou, P.; Andrew, L.Y.T.; Ding, H. The elliptical Hertzian contact of transversely isotropic magnetoelectroelastic bodies. Int. J. Solids Struct. 2003, 40, 2833–2850. [Google Scholar] [CrossRef]
- Zhao, Y.; Wu, H.; Yang, C.; Liu, Z.; Cheng, Q. Interval estimation for contact stiffness of bolted joint with uncertain parameters. Adv. Mech. Eng. 2019, 11, 168781401988370. [Google Scholar] [CrossRef]
- Wei, C.C.; Lai, R.S. Kinematical analyses and transmission efficiency of a preloaded ball screw operating at high rotational speeds. Mech. Mach. Theory 2011, 46, 880–898. [Google Scholar] [CrossRef]
- Mei, Z.; Ding, J.; Chen, L.; Pi, T.; Mei, Z. Hybrid Multi-Domain Analytical and Data-Driven Modeling for Feed Systems in Machine Tools. Symmetry 2019, 11, 1156. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, S.; Zhang, Y.; Lu, Z.; Zhao, C. Investigation on Sensorless Estimating Method and Characteristics of Friction for Ball Screw System. Appl. Sci. 2020, 10, 3122. [Google Scholar] [CrossRef]
- Duan, M.; Lu, H.; Zhang, X.; Zhang, Y.; Li, Z.; Liu, Q. Dynamic Modeling and Experiment Research on Twin Ball Screw Feed System Considering the Joint Stiffness. Symmetry 2018, 10, 686. [Google Scholar] [CrossRef]
- Vicente, D.A.; Hecker, R.L.; Villegas, F.J.; Flores, G.M. Modeling and vibration mode analysis of a ball screw drive. Int. J. Adv. Manuf. Technol. 2012, 58, 257–266. [Google Scholar] [CrossRef]































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Nominal diameter of screw | 32 | mm |
| Screw lead | 10 | mm |
| Ball diameter | 5.95 | mm |
| Raceway curvature ratio | 1.07 | |
| Number of rolling elements around screw in nut | 63 | |
| Effective turn numbers of balls | 3.5 | |
| Nut outer diameter | 58 | mm |
| Elastic modulus | 210 | GPa |
| Poisson ratio | 0.3 |
| Parameters | Value | Unit |
|---|---|---|
| I. Geometric parameters of feed system | ||
| orktable mass mt | 325 | Kg |
| Axial stiffness of fixed end bearing | 2 × 108 | N/m |
| The length of the screw | 500 | mm |
| The travel of the feed system | 300 | mm |
| Motor torque coefficient | 1.85 | Nm/A |
| Elastic modulus of screw shaft Es | 210 | GPa |
| II. Operating conditions | ||
| Feed speed | 10,000 | mm/min |
| 500 | mm/min | |
| Two end point coordinates | ||
| Z0 | 15 | mm |
| Z1 | 285 | mm |
| Screw Speed (rpm) | Direction | Theoretical Value | Measured Value | |||
|---|---|---|---|---|---|---|
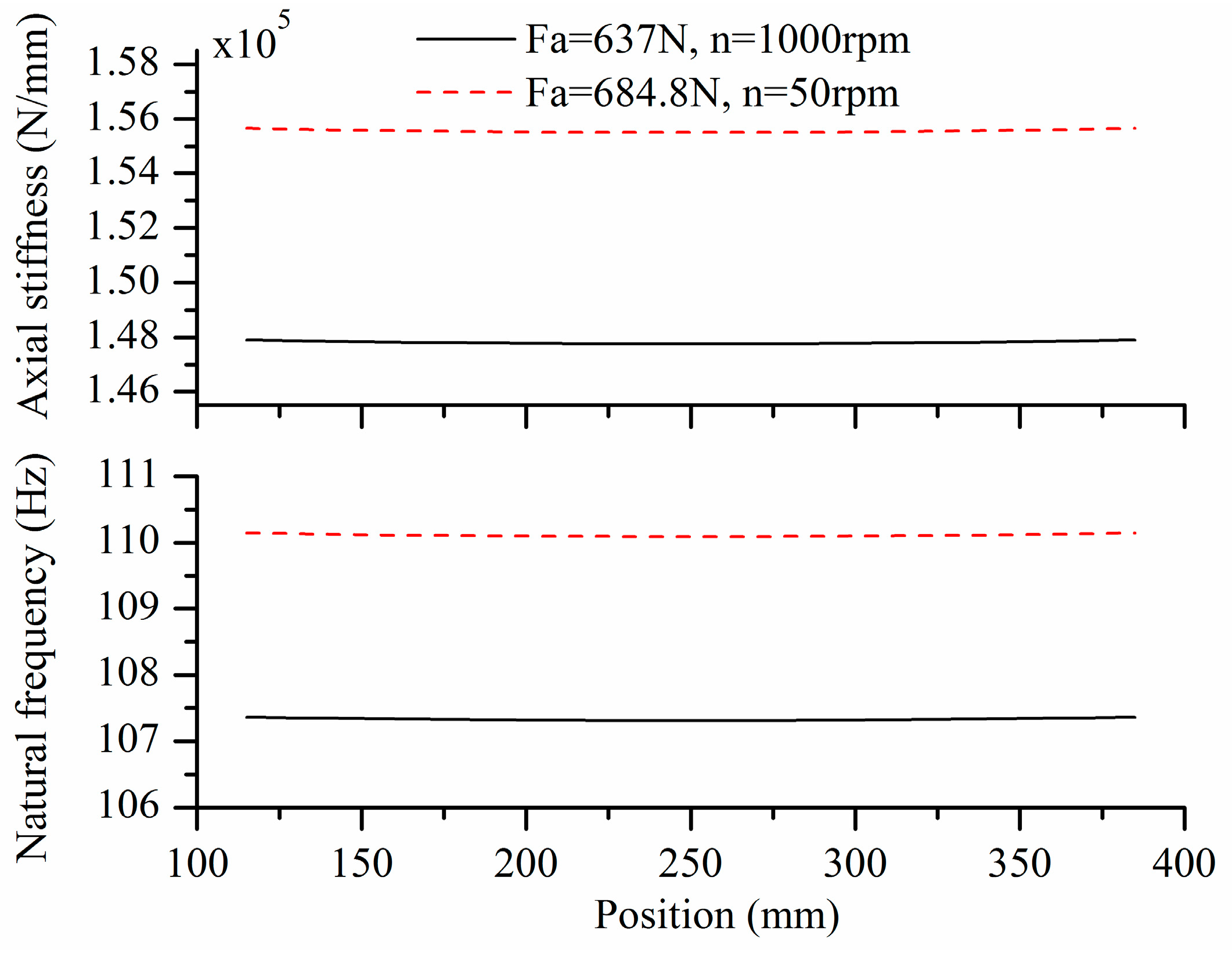
| 1000 | Z1—Z0 | 636.8 | 3.439 × 108 | (1.4790~1.4776) × 108 | 107.31~107.36 | 108.3 |
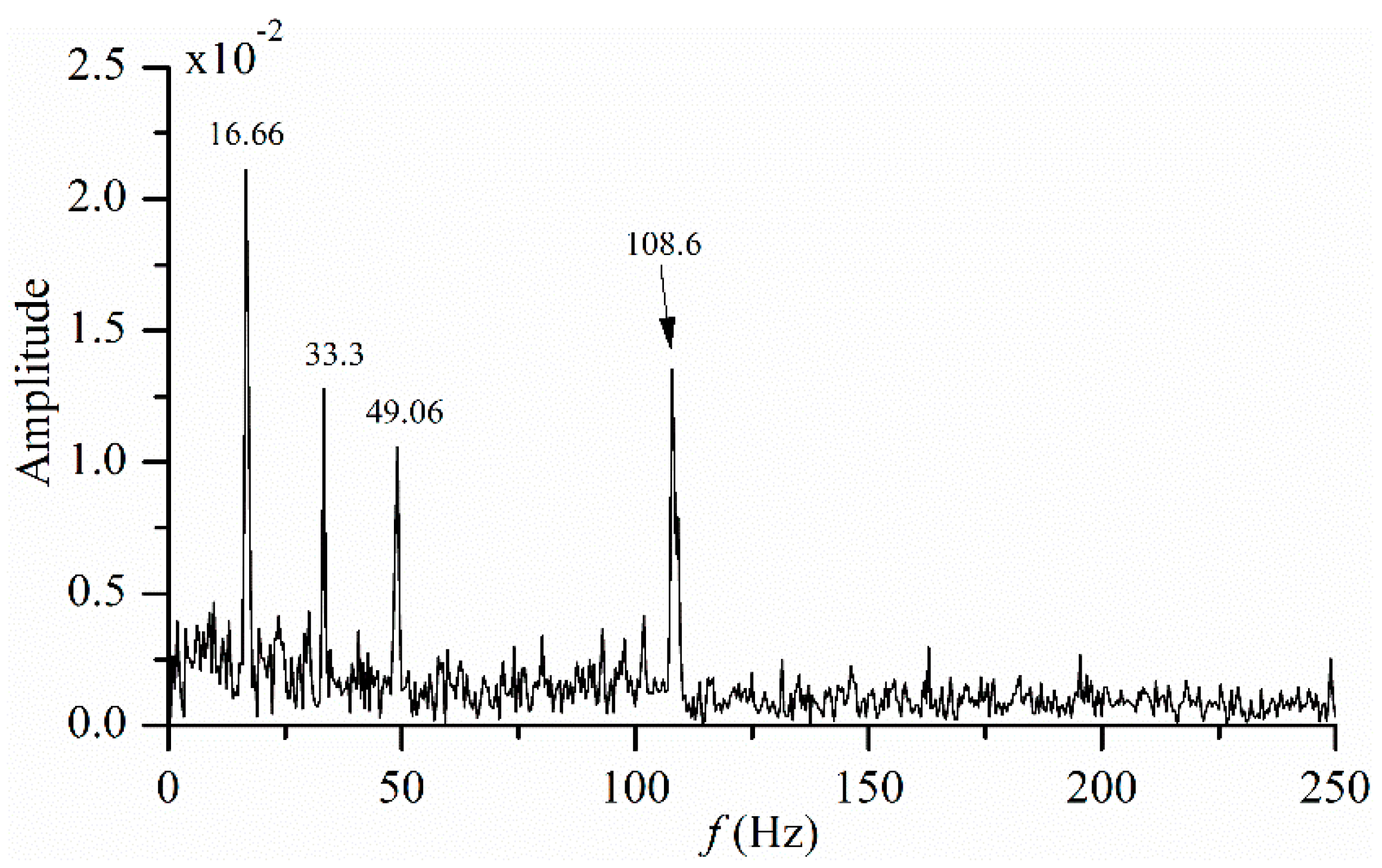
| 635.6 | 3.439 × 108 | (1.4790~1.4776) × 108 | 107.31~107.36 | 108.6 | ||
| 637 | 3.439 × 108 | (1.4790~1.4776) × 108 | 107.31~107.36 | 108.5 | ||
| Z0—Z1 | 637 | 3.439 × 108 | (1.4790~1.4776) × 108 | 107.31~107.36 | 108.4 | |
| 635.6 | 3.439 × 108 | (1.4790~1.4776) × 108 | 107.31~107.36 | 108.6 | ||
| 637.5 | 3.439 × 108 | (1.4790~1.4776) × 108 | 107.31~107.36 | 108.5 | ||
| 50 | Z1—Z0 | 684.8 | 3.89 × 108 | (1.5551~1.5566) × 108 | 110.09~110.15 | 112.1 |
| 683.6 | 3.89 × 108 | (1.5551~1.5566) × 108 | 110.09~110.15 | 111.8 | ||
| 684.8 | 3.89 × 108 | (1.5551~1.5566) × 108 | 110.09~110.15 | 112.1 | ||
| Z0—Z1 | 684.8 | 3.89 × 108 | (1.5551~1.5566) × 108 | 110.09~110.15 | 112.1 | |
| 684.8 | 3.89 × 108 | (1.5551~1.5566) × 108 | 110.09~110.15 | 112.2 | ||
| 685.6 | 3.89 × 108 | (1.5551~1.5566) × 108 | 110.09~110.15 | 112.2 | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Zhao, C.; Li, Z.; Lu, Z. Analysis on Dynamic Contact Characteristics and Dynamic Stiffness Estimating Method of Single Nut Ball Screw Pair Based on the Whole Rolling Elements Model. Appl. Sci. 2020, 10, 5795. https://doi.org/10.3390/app10175795
Chen Y, Zhao C, Li Z, Lu Z. Analysis on Dynamic Contact Characteristics and Dynamic Stiffness Estimating Method of Single Nut Ball Screw Pair Based on the Whole Rolling Elements Model. Applied Sciences. 2020; 10(17):5795. https://doi.org/10.3390/app10175795
Chicago/Turabian StyleChen, Ye, Chunyu Zhao, Zhenjun Li, and Zechen Lu. 2020. "Analysis on Dynamic Contact Characteristics and Dynamic Stiffness Estimating Method of Single Nut Ball Screw Pair Based on the Whole Rolling Elements Model" Applied Sciences 10, no. 17: 5795. https://doi.org/10.3390/app10175795
APA StyleChen, Y., Zhao, C., Li, Z., & Lu, Z. (2020). Analysis on Dynamic Contact Characteristics and Dynamic Stiffness Estimating Method of Single Nut Ball Screw Pair Based on the Whole Rolling Elements Model. Applied Sciences, 10(17), 5795. https://doi.org/10.3390/app10175795