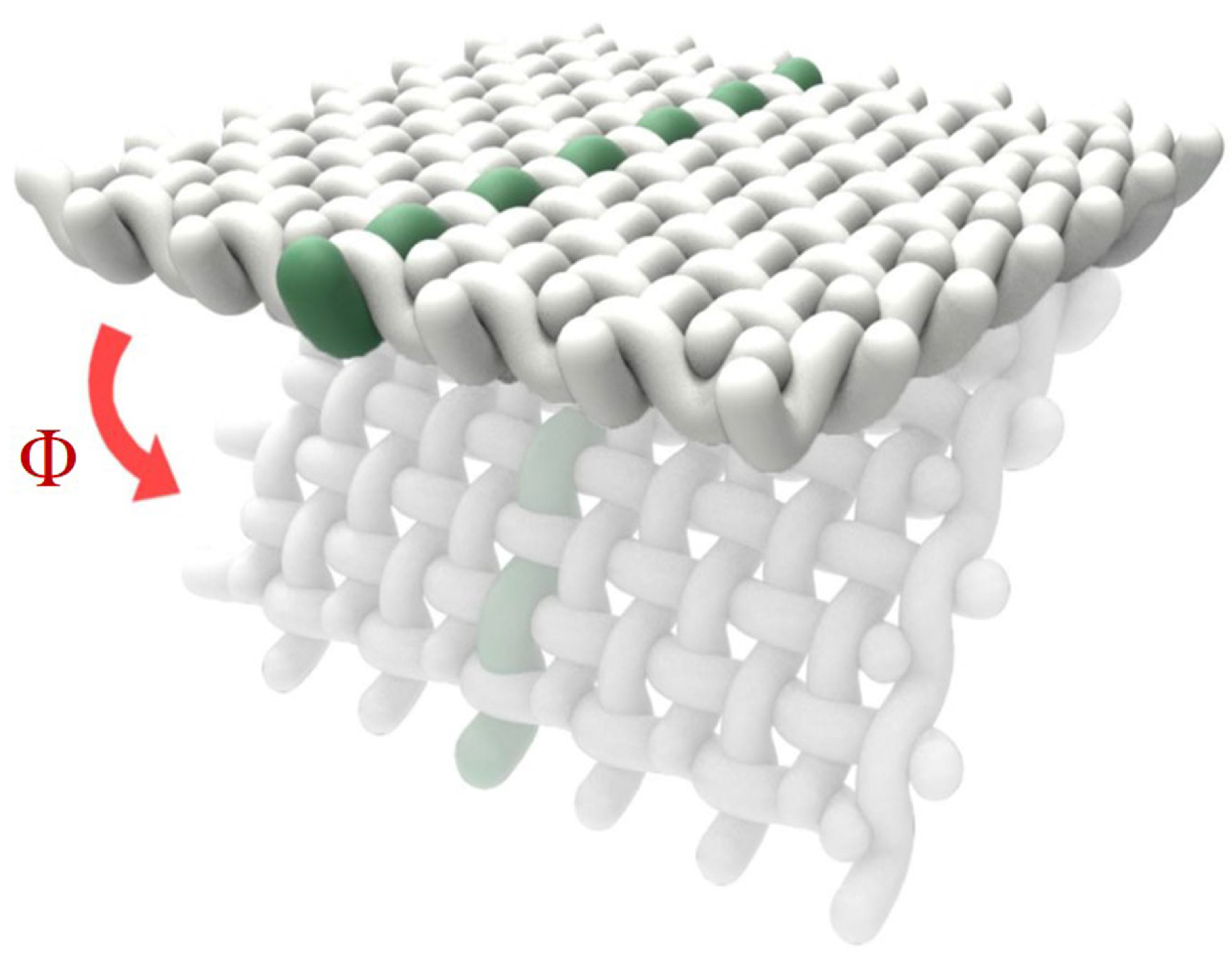
Piezoelectric Sensor with a Helical Structure on the Thread Core



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Fabrication
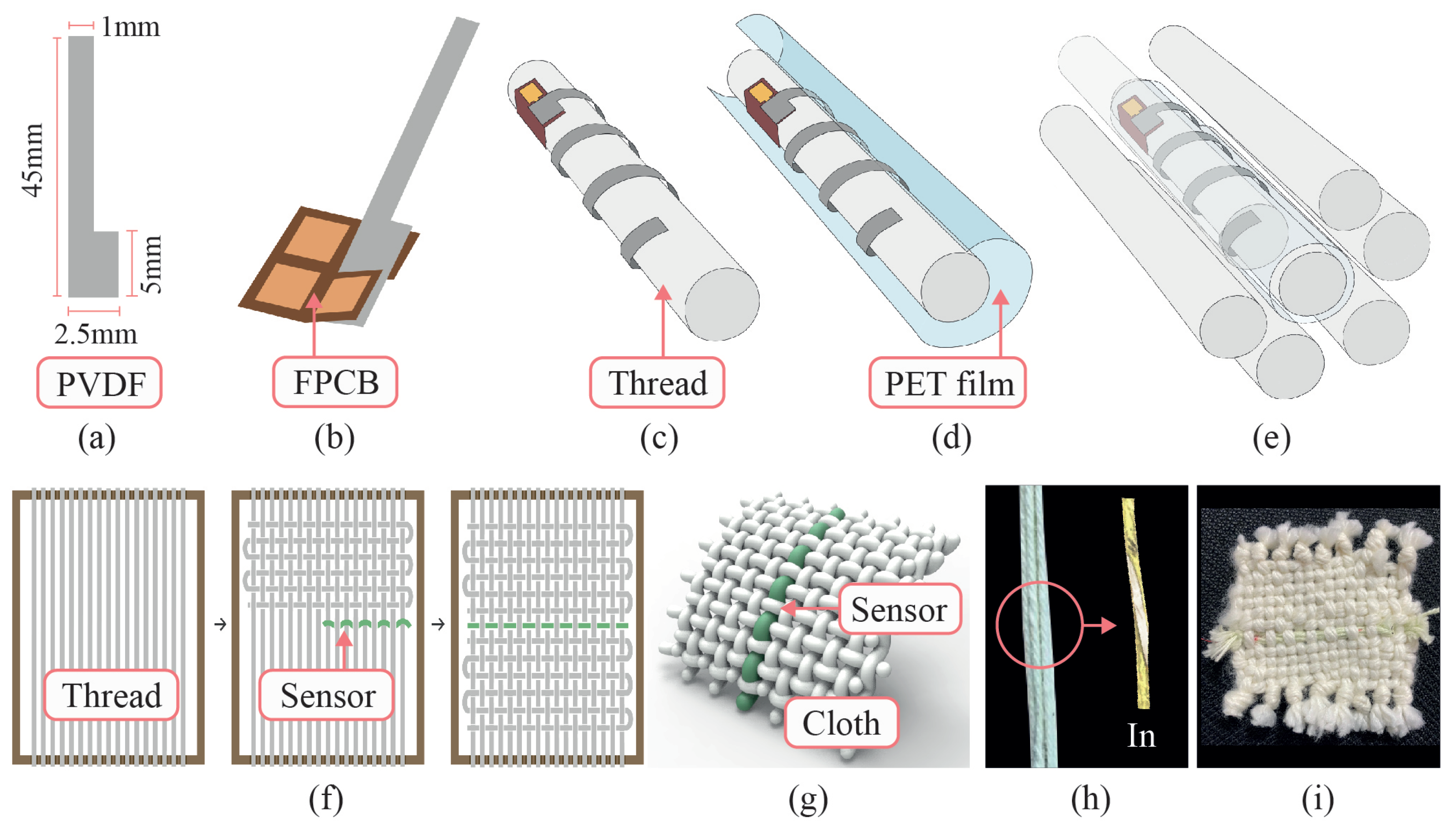
2.1. Fabrication of a Piezoelectric Sensor with a Helical Structure
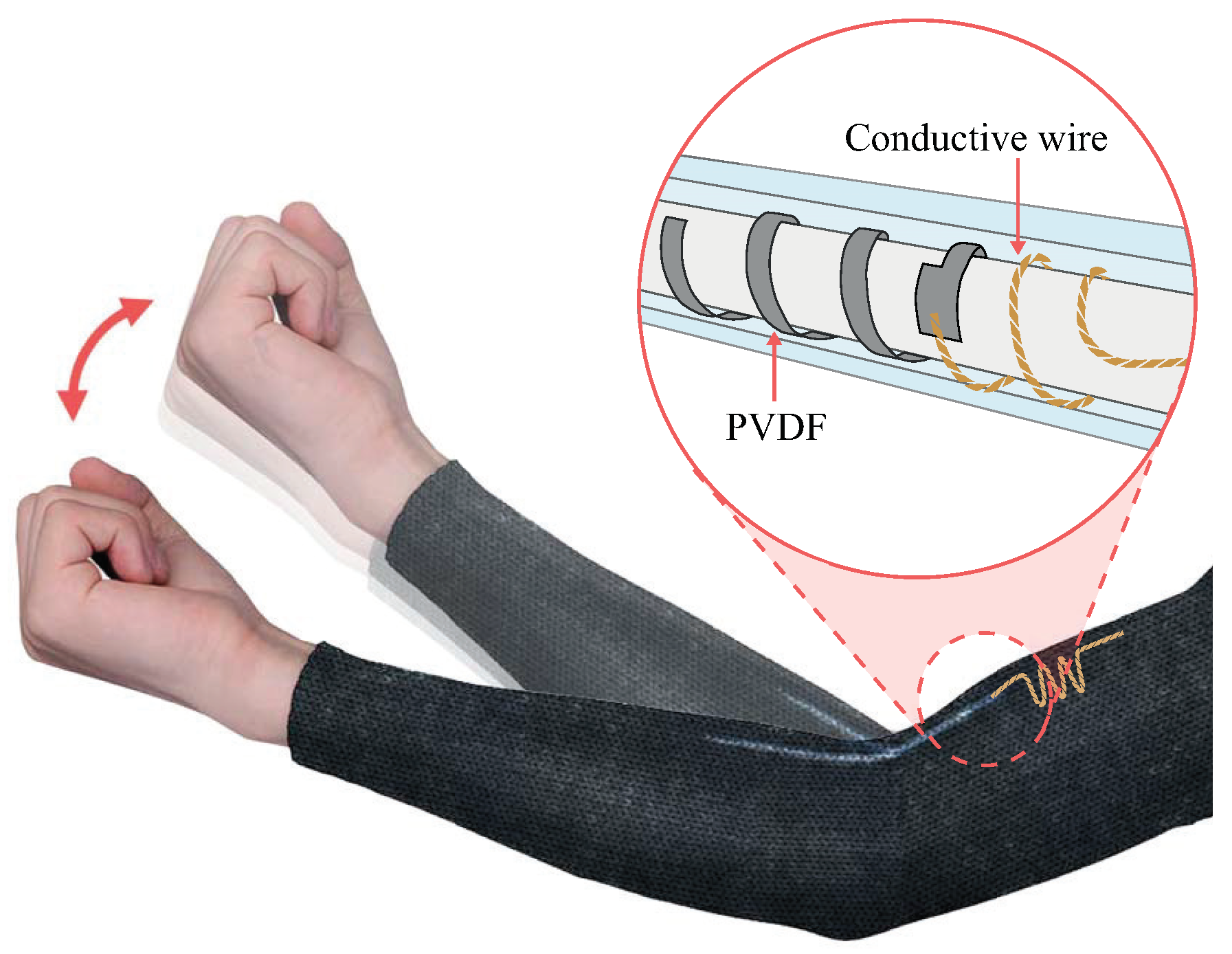
2.2. Fabrication of Smart Textiles
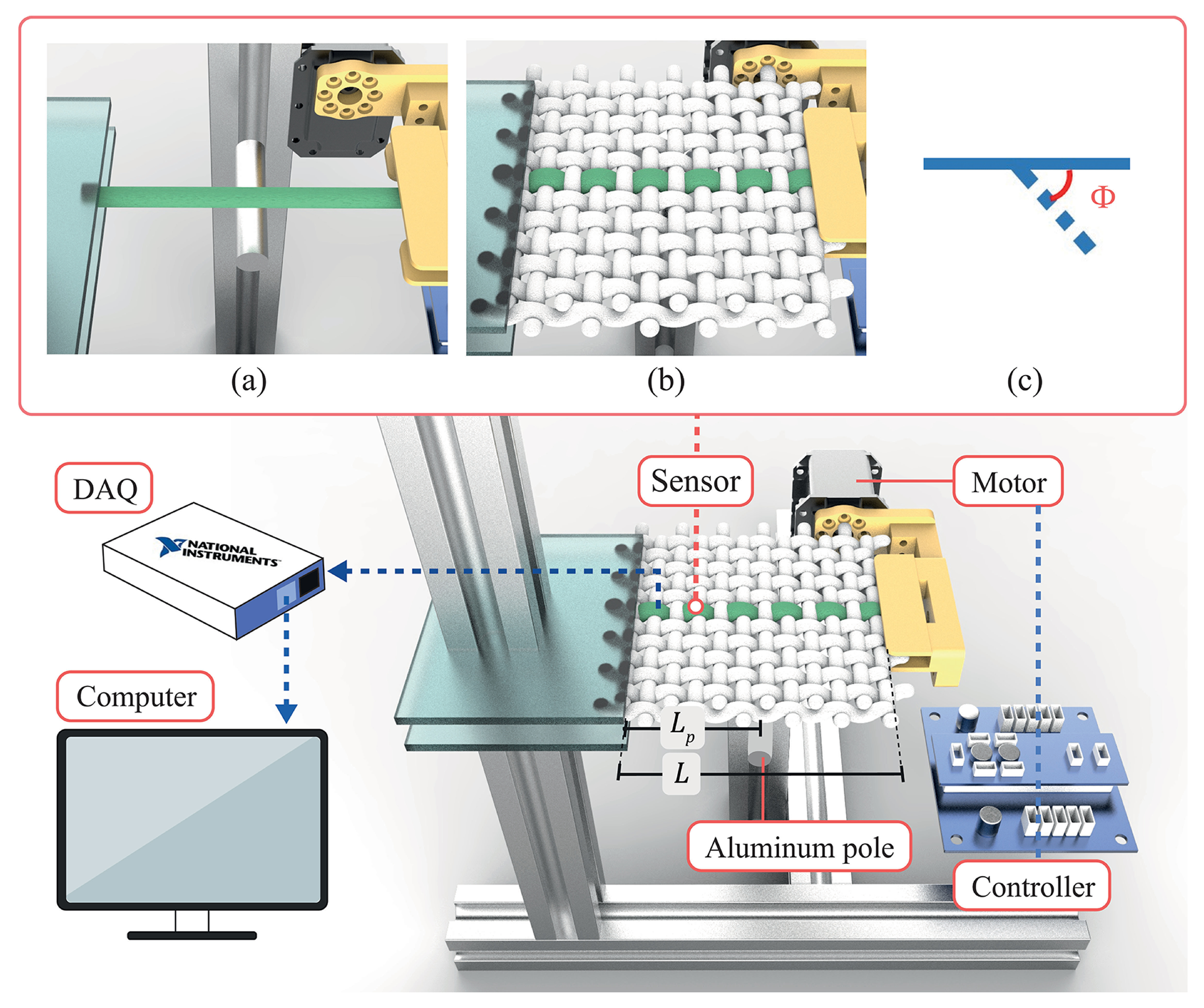
3. Experimental Setup
4. Results
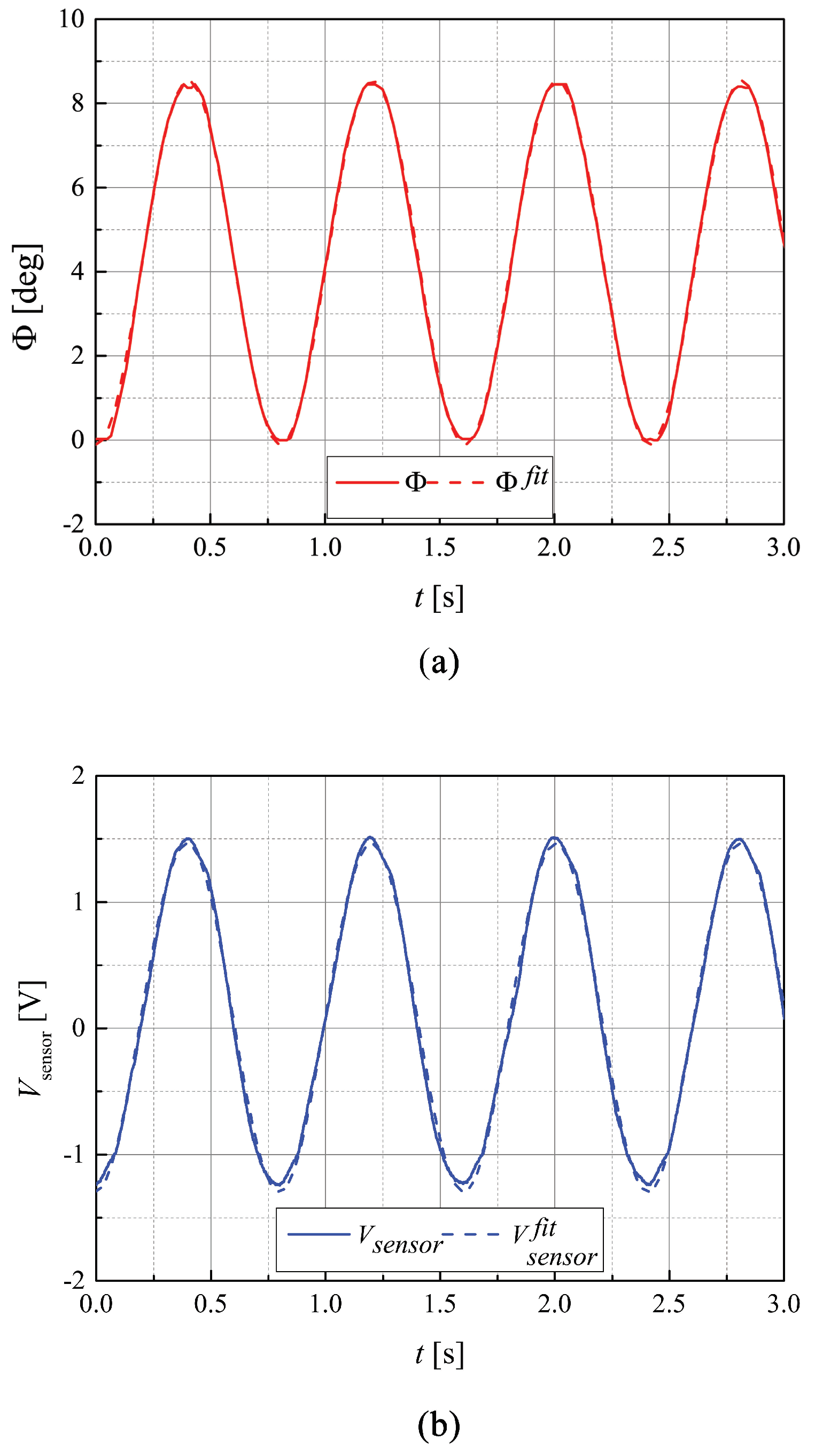
4.1. Time Trace of Sensor Output
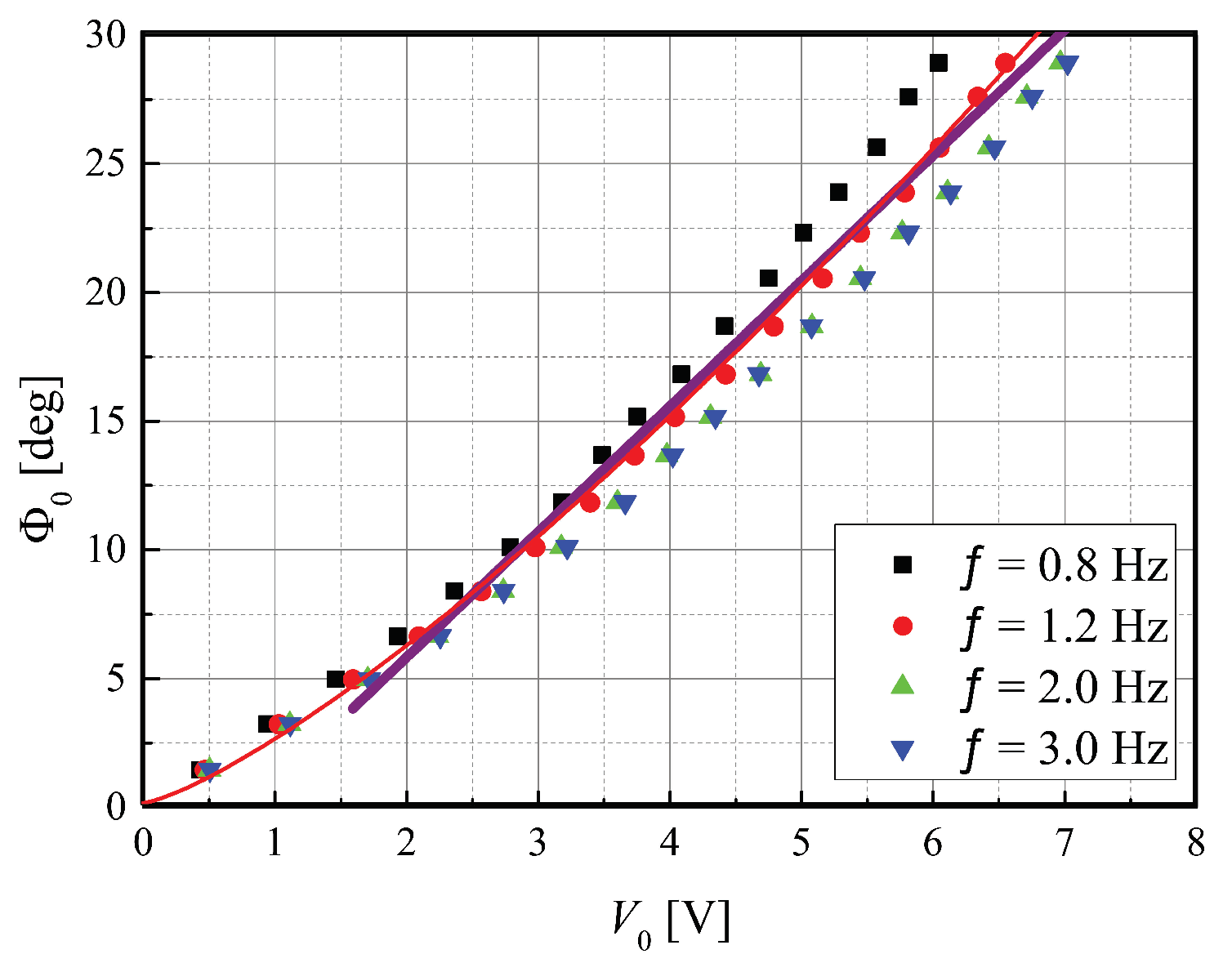
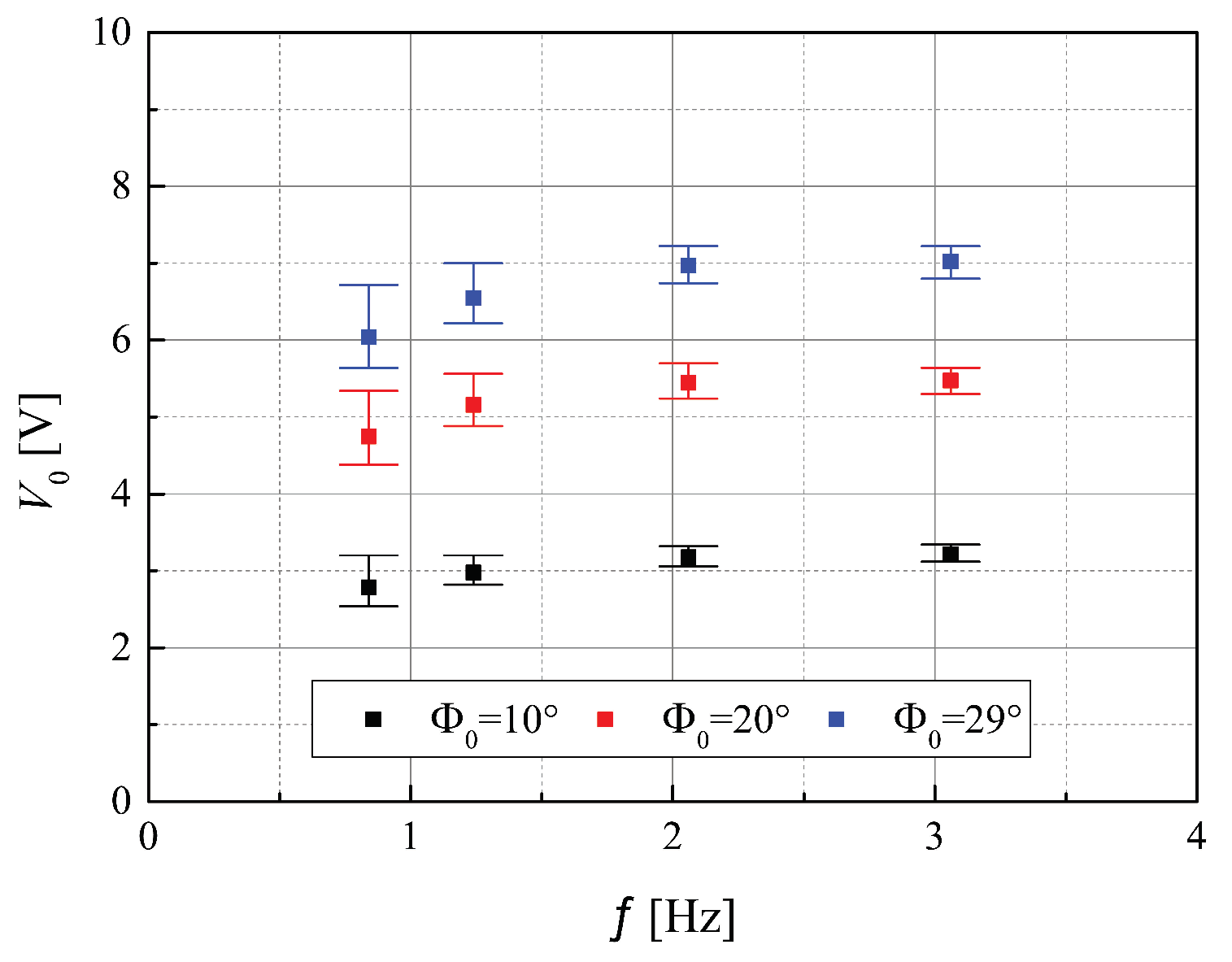
4.2. Output Voltage of the Sensor According to Bending Input Variation
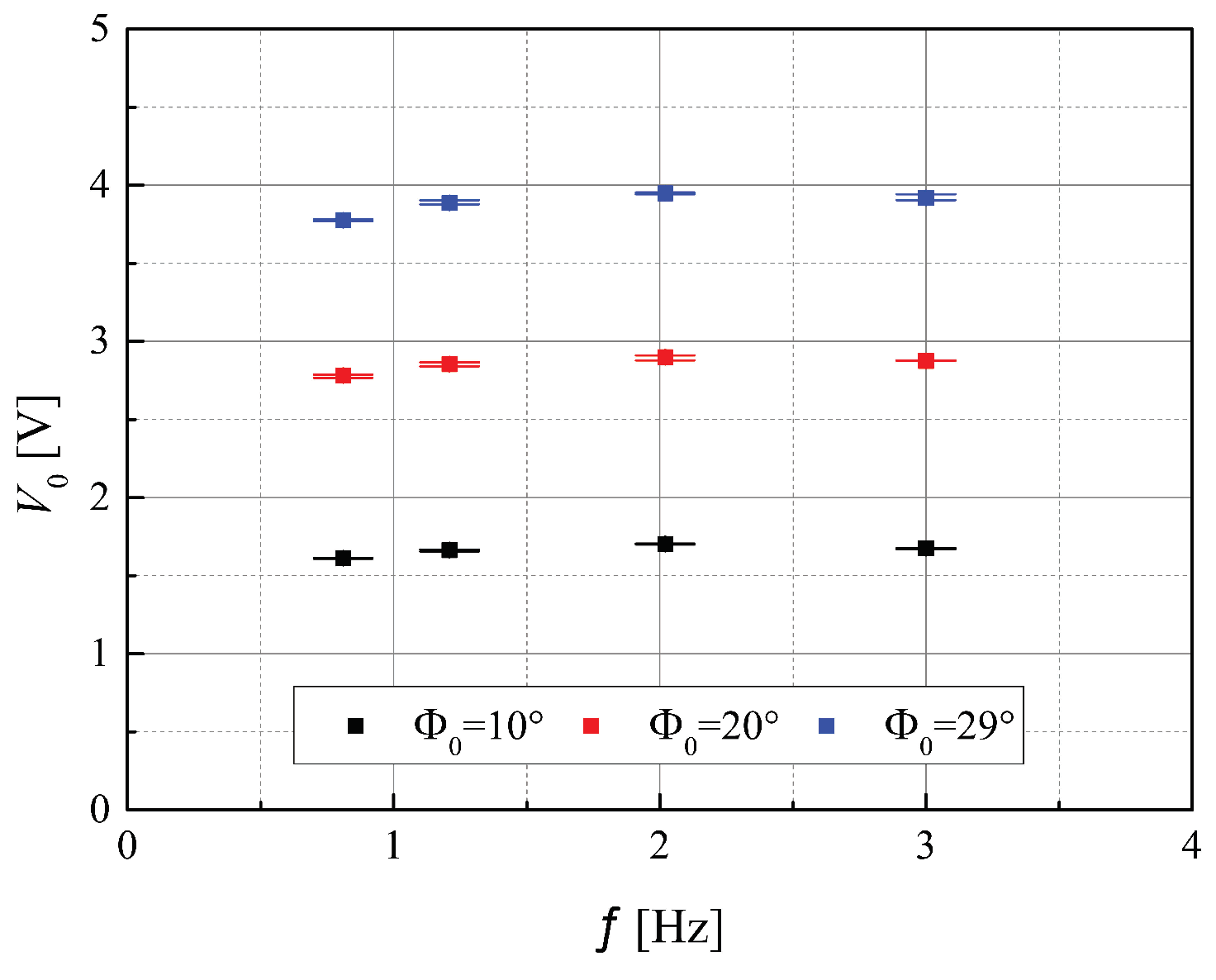
4.3. Output Voltage of the Smart Textile According to Bending Input Variation
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ADC | Analog-to-digital converter |
| DAQ | Data acquisition |
| FPCB | Flexible printed circuit board |
| PET | Polyethylene terephthalate |
| PVDF | Polyvinylidene fluoride |
References
- Evans, A.M. Fashionable Females: Women, Clothes, and Culture in New York. Comp. Am. Stud. Int. J. 2013, 11, 361–373. [Google Scholar] [CrossRef]
- Hurlock, E.B. The Psychology of Dress: An Analysis of Fashion and Its Motive; The Ronald Press Company: New York, NY, USA, 1929. [Google Scholar]
- Liu, K.; Wang, J.; Zhu, C.; Hong, Y. Development of upper cycling clothes using 3D-to-2D flattening technology and evaluation of dynamic wear comfort from the aspect of clothing pressure. Int. J. Cloth. Sci. Technol. 2016, 28, 736–749. [Google Scholar] [CrossRef]
- Pugh, L. Clothing insulation and accidental hypothermia in youth. Nature 1966, 209, 1281–1286. [Google Scholar] [CrossRef] [PubMed]
- Zhong, Y.; Zhang, F.; Wang, M.; Gardner, C.J.; Kim, G.; Liu, Y.; Leng, J.; Jin, S.; Chen, R. Reversible humidity sensitive clothing for personal thermoregulation. Sci. Rep. 2017, 7, 44208. [Google Scholar] [CrossRef]
- Morley, J.; Beauchamp, G.; Suyama, J.; Guyette, F.X.; Reis, S.E.; Callaway, C.W.; Hostler, D. Cognitive function following treadmill exercise in thermal protective clothing. Eur. J. Appl. Physiol. 2012, 112, 1733–1740. [Google Scholar] [CrossRef] [PubMed]
- McCann, J.; Bryson, D. Smart Clothes and Wearable Technology; Elsevier: Amsterdam, The Netherlands, 2009. [Google Scholar]
- Axisa, F.; Schmitt, P.M.; Gehin, C.; Delhomme, G.; McAdams, E.; Dittmar, A. Flexible technologies and smart clothing for citizen medicine, home healthcare, and disease prevention. IEEE Trans. Inf. Technol. Biomed. 2005, 9, 325–336. [Google Scholar] [CrossRef] [PubMed]
- Cho, G.; Lee, S.; Cho, J. Review and reappraisal of smart clothing. Int. J. Hum. Comput. Interact. 2009, 25, 582–617. [Google Scholar] [CrossRef]
- Mohammed, A.; Seeam, A.; Bellekens, X.; Nieradzinska, K.; Ramsurrun, V. Gesture based IOT light control for smart clothing. In Proceedings of the 2016 IEEE International Conference on Emerging Technologies and Innovative Business Practices for the Transformation of Societies (EmergiTech), Balaclava, Mauritius, 3–6 August 2016; pp. 139–142. [Google Scholar]
- Yang, J.; Zhou, J.; Tao, G.; Alrashoud, M.; Al Mutib, K.N.; Al-Hammadi, M. Wearable 3.0: From Smart Clothing to Wearable Affective Robot. IEEE Netw. 2019, 33, 8–14. [Google Scholar] [CrossRef]
- Rantanen, J.; ImpioĘ, J.; Karinsalo, T.; Malmivaara, M.; Reho, A.; Tasanen, M.; Vanhala, J. Smart clothing prototype for the arctic environment. Pers. Ubiquitous Comput. 2002, 6, 3–16. [Google Scholar] [CrossRef]
- Chen, M.; Ma, Y.; Song, J.; Lai, C.F.; Hu, B. Smart clothing: Connecting human with clouds and big data for sustainable health monitoring. Mob. Netw. Appl. 2016, 21, 825–845. [Google Scholar] [CrossRef]
- Yama, Y.; Ueno, A.; Uchikawa, Y. Development of a wireless capacitive sensor for ambulatory ECG monitoring over clothes. In Proceedings of the 2007 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Lyon, France, 22–26 August 2007. [Google Scholar]
- Hertleer, C.; Rogier, H.; Van L, L. Design of textile antennas for smart clothing. In Proceedings of the 7th UGent PhD Symposium, Lodz, Poland, 29 November 2006. [Google Scholar]
- Wang, J.; Li, X.; Zi, Y.; Wang, S.; Li, Z.; Zheng, L.; Yi, F.; Li, S.; Wang, Z.L. A Flexible Fiber-Based Supercapacitor–Triboelectric-Nanogenerator Power System for Wearable Electronics. Adv. Mater. 2015, 27, 4830–4836. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Song, Y.; Su, Z.; Chen, H.; Cheng, X.; Zhang, J.; Han, M.; Zhang, H. Flexible fiber-based hybrid nanogenerator for biomechanical energy harvesting and physiological monitoring. Nano Energy 2017, 38, 43–50. [Google Scholar] [CrossRef]
- Weng, W.; Chen, P.; He, S.; Sun, X.; Peng, H. Smart electronic textiles. Angew. Chem. Int. Ed. 2016, 55, 6140–6169. [Google Scholar] [CrossRef] [PubMed]
- Cherenack, K.; van Pieterson, L. Smart textiles: Challenges and opportunities. J. Appl. Phys. 2012, 112, 091301. [Google Scholar] [CrossRef]
- Ruppert-Stroescu, M.; Balasubramanian, M. Effects of stitch classes on the electrical properties of conductive threads. Text. Res. J. 2018, 88, 2454–2463. [Google Scholar] [CrossRef]
- Harnett, C.K.; Zhao, H.; Shepherd, R.F. Stretchable Optical Fibers: Threads for Strain-Sensitive Textiles. Adv. Mater. Technol. 2017, 2, 1700087. [Google Scholar] [CrossRef]
- Ryu, S.; Lee, P.; Chou, J.B.; Xu, R.; Zhao, R.; Hart, A.J.; Kim, S. Extremely elastic wearable carbon nanotube fiber strain sensor for monitoring of human motion. ACS Nano 2015, 9, 5929–5936. [Google Scholar] [CrossRef] [PubMed]
- Deng, Z.; Hu, T.; Lei, Q.; He, J.; Ma, P.X.; Guo, B. Stimuli-responsive conductive Nanocomposite hydrogels with high Stretchability, self-healing, adhesiveness, and 3D printability for human motion sensing. ACS Appl. Mater. Interfaces 2019, 11, 6796–6808. [Google Scholar] [CrossRef]
- Imani, S.; Bandodkar, A.J.; Mohan, A.V.; Kumar, R.; Yu, S.; Wang, J.; Mercier, P.P. A wearable chemical–electrophysiological hybrid biosensing system for real-time health and fitness monitoring. Nat. Commun. 2016, 7, 1–7. [Google Scholar] [CrossRef]
- Cha, Y.; Chung, J.; Hur, S. Torsion sensing on a cylinder using a flexible piezoelectric wrist band. IEEE/ASME Trans. Mechatron. 2019, 25, 460–467. [Google Scholar] [CrossRef]
- Zhong, J.; Zhong, Q.; Hu, Q.; Wu, N.; Li, W.; Wang, B.; Hu, B.; Zhou, J. Stretchable self-powered fiber-based strain sensor. Adv. Funct. Mater. 2015, 25, 1798–1803. [Google Scholar] [CrossRef]
- Dziuda, L.; Skibniewski, F.W.; Krej, M.; Lewandowski, J. Monitoring respiration and cardiac activity using fiber Bragg grating-based sensor. IEEE Trans. Biomed. Eng. 2012, 59, 1934–1942. [Google Scholar] [CrossRef] [PubMed]
- Du, B.; Yang, D.; She, X.; Yuan, Y.; Mao, D.; Jiang, Y.; Lu, F. MoS2-based all-fiber humidity sensor for monitoring human breath with fast response and recovery. Sens. Actuators B Chem. 2017, 251, 180–184. [Google Scholar] [CrossRef]
- Tajitsu, Y. Smart piezoelectric fabric and its application to control of humanoid robot. Ferroelectrics 2016, 499, 36–46. [Google Scholar] [CrossRef]
- Yan, M.; Yuan, X.; Zhang, Y.; Zhang, S.; Wang, X.; Gao, F.; Zhou, K.; Zhang, D. Investigation of shear piezoelectric fiber composite for flexible sensor application. Smart Mater. Struct. 2019, 28, 125015. [Google Scholar] [CrossRef]
- Choi, S.; Jiang, Z. A novel wearable sensor device with conductive fabric and PVDF film for monitoring cardiorespiratory signals. Sensors Actuators A Phys. 2006, 128, 317–326. [Google Scholar] [CrossRef]
- Lee, M.; Chen, C.; Wang, S.; Cha, S.; Park, Y.; Kim, J.; Chou, L.; Wang, Z. A hybrid piezoelectric structure for wearable nanogenerators. Adv. Mater. 2012, 24, 1759–1764. [Google Scholar] [CrossRef]
- Sadeqi, A.; Nejad, H.R.; Alaimo, F.; Yun, H.; Punjiya, M.; Sonkusale, S.R. Washable Smart Threads for Strain Sensing Fabrics. IEEE Sens. J. 2018, 18, 9137–9144. [Google Scholar] [CrossRef]
- Yun, D.; Park, J.; Yun, K. Highly stretchable energy harvester using piezoelectric helical structure for wearable applications. Electron. Lett. 2015, 51, 284–285. [Google Scholar] [CrossRef]
- Lu, X.; Qu, H.; Skorobogatiy, M. Piezoelectric microstructured fibers via drawing of multimaterial preforms. Sci. Rep. 2017, 7, 1–12. [Google Scholar] [CrossRef]
- Soin, N.; Shah, T.H.; Anand, S.C.; Geng, J.; Pornwannachai, W.; Mandal, P.; Reid, D.; Sharma, S.; Hadimani, R.L.; Bayramol, D.V.; et al. Novel “3-D spacer” all fibre piezoelectric textiles for energy harvesting applications. Energy Environ. Sci. 2014, 7, 1670–1679. [Google Scholar] [CrossRef]
- Lund, A.; Rundqvist, K.; Nilsson, E.; Yu, L.; Hagström, B.; Müller, C. Energy harvesting textiles for a rainy day: Woven piezoelectrics based on melt-spun PVDF microfibres with a conducting core. Npj Flex. Electron. 2018, 2, 1–9. [Google Scholar] [CrossRef]
- Kim, M.; Yun, K. Helical piezoelectric energy harvester and its application to energy harvesting garments. Micromachines 2017, 8, 115. [Google Scholar] [CrossRef]
- Godfrey, A.; Conway, R.; Meagher, D.; ÓLaighin, G. Direct measurement of human movement by accelerometry. Med Eng. Phys. 2008, 30, 1364–1386. [Google Scholar] [CrossRef] [PubMed]
- Cha, Y.; Verotti, M.; Walcott, H.; Peterson, S.D.; Porfiri, M. Energy harvesting from the tail beating of a carangiform swimmer using ionic polymer–metal composites. Bioinspir. Biomim. 2013, 8, 036003. [Google Scholar] [CrossRef] [PubMed]
- Ryan, S.M.; Szyniszewski, S.; Ha, S.; Xiao, R.; Nguyen, T.D.; Sharp, K.W.; Weihs, T.P.; Guest, J.K.; Hemker, K.J. Damping behavior of 3D woven metallic lattice materials. Scr. Mater. 2015, 106, 1–4. [Google Scholar] [CrossRef]
- Sun, H.; You, X.; Deng, J.; Chen, X.; Yang, Z.; Chen, P.; Fang, X.; Peng, H. A twisted wire-shaped dual-function energy device for photoelectric conversion and electrochemical storage. Angew. Chem. 2014, 126, 6782–6786. [Google Scholar] [CrossRef]
- Åkerfeldt, M.; Lund, A.; Walkenström, P. Textile sensing glove with piezoelectric PVDF fibers and printed electrodes of PEDOT: PSS. Text. Res. J. 2015, 85, 1789–1799. [Google Scholar] [CrossRef]
- Cha, Y.; Kim, H.; Kim, D. Flexible piezoelectric sensor-based gait recognition. Sensors 2018, 18, 468. [Google Scholar] [CrossRef]
- Kim, S.H.; Kwon, Y.; Kim, K.; Cha, Y. Estimation of Hand Motion from Piezoelectric Soft Sensor Using Deep Recurrent Network. Appl. Sci. 2020, 10, 2194. [Google Scholar] [CrossRef]
- Song, K.; Kim, S.H.; Jin, S.; Kim, S.; Lee, S.; Kim, J.S.; Park, J.M.; Cha, Y. Pneumatic actuator and flexible piezoelectric sensor for soft virtual reality glove system. Sci. Rep. 2019, 9, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Tajitsu, Y. Piezoelectric Poly-L-lactic acid fabric and its application to control of humanoid robot. Ferroelectrics 2017, 515, 44–58. [Google Scholar] [CrossRef]
- Lanitis, A. A survey of the effects of aging on biometric identity verification. Int. J. Biom. 2010, 2, 34. [Google Scholar] [CrossRef]
- Vancea, M.; Solé, J. Population aging in the European Information Societies: Towards a comprehensive research Agenda in eHealth innovations for elderly. Aging Dis. 2016, 7, 526. [Google Scholar] [CrossRef] [PubMed]









© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, C.; Kim, H.; Cha, Y. Piezoelectric Sensor with a Helical Structure on the Thread Core. Appl. Sci. 2020, 10, 5073. https://doi.org/10.3390/app10155073
Park C, Kim H, Cha Y. Piezoelectric Sensor with a Helical Structure on the Thread Core. Applied Sciences. 2020; 10(15):5073. https://doi.org/10.3390/app10155073
Chicago/Turabian StylePark, Cheoleon, Hojoon Kim, and Youngsu Cha. 2020. "Piezoelectric Sensor with a Helical Structure on the Thread Core" Applied Sciences 10, no. 15: 5073. https://doi.org/10.3390/app10155073
APA StylePark, C., Kim, H., & Cha, Y. (2020). Piezoelectric Sensor with a Helical Structure on the Thread Core. Applied Sciences, 10(15), 5073. https://doi.org/10.3390/app10155073