Neural Network Approach to MPPT Control and Irradiance Estimation



Abstract
1. Introduction
2. Theoretical Background
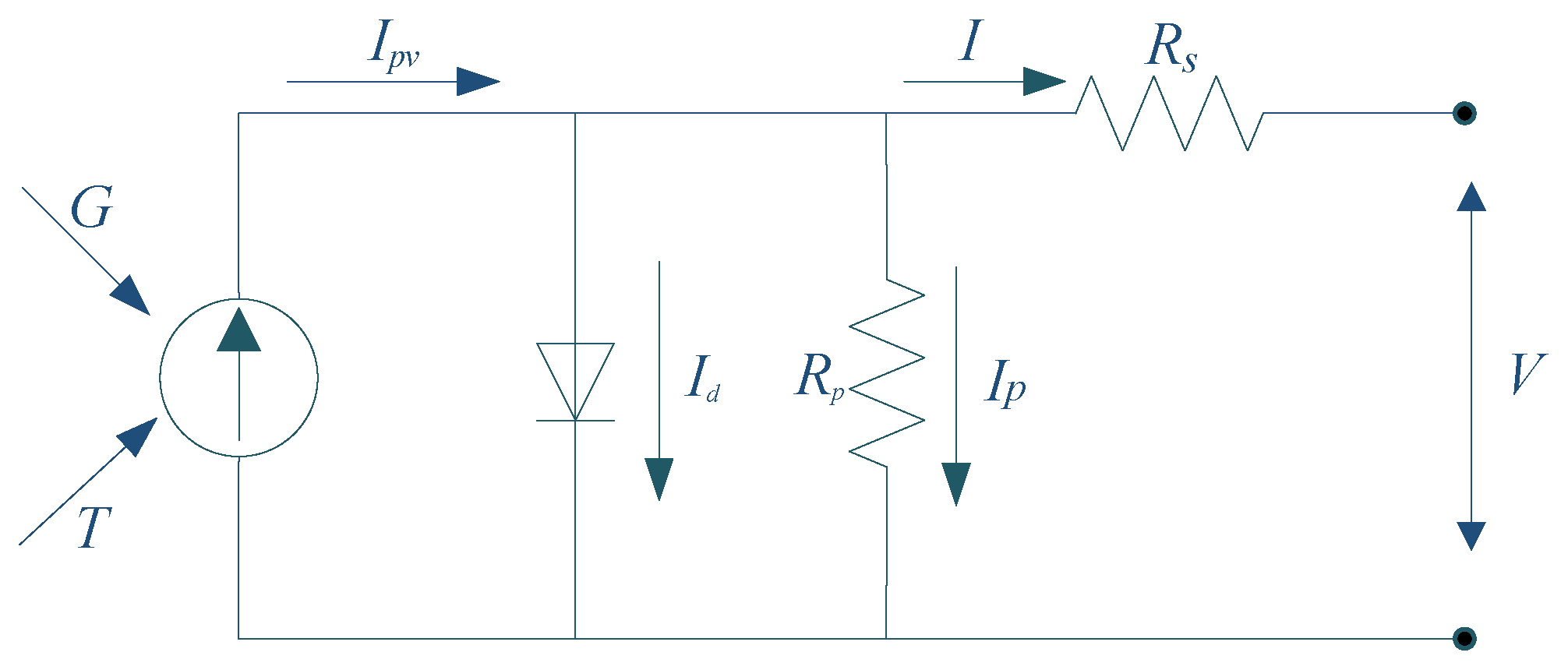
2.1. Equivalent Electrical Circuit of PV Module
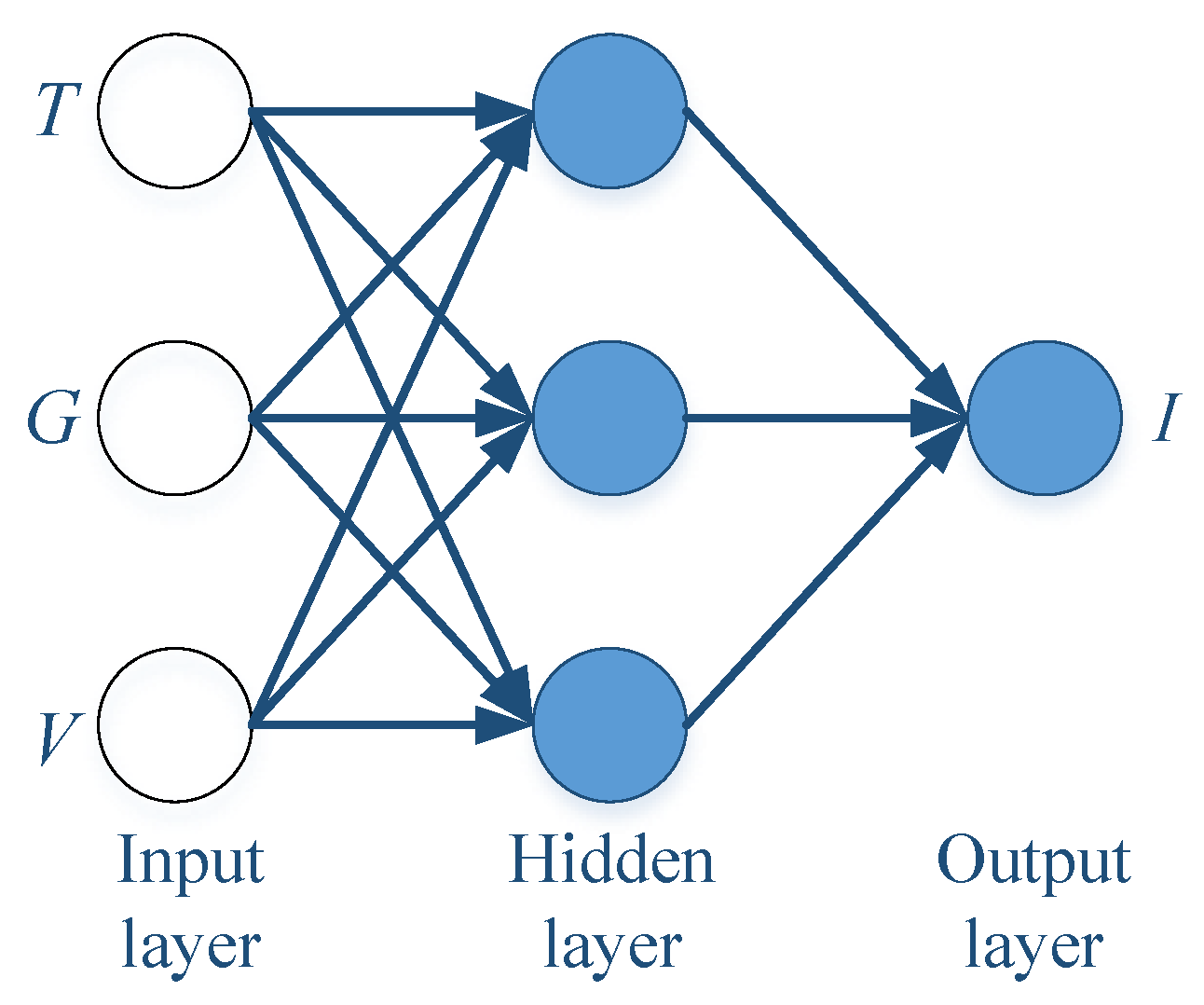
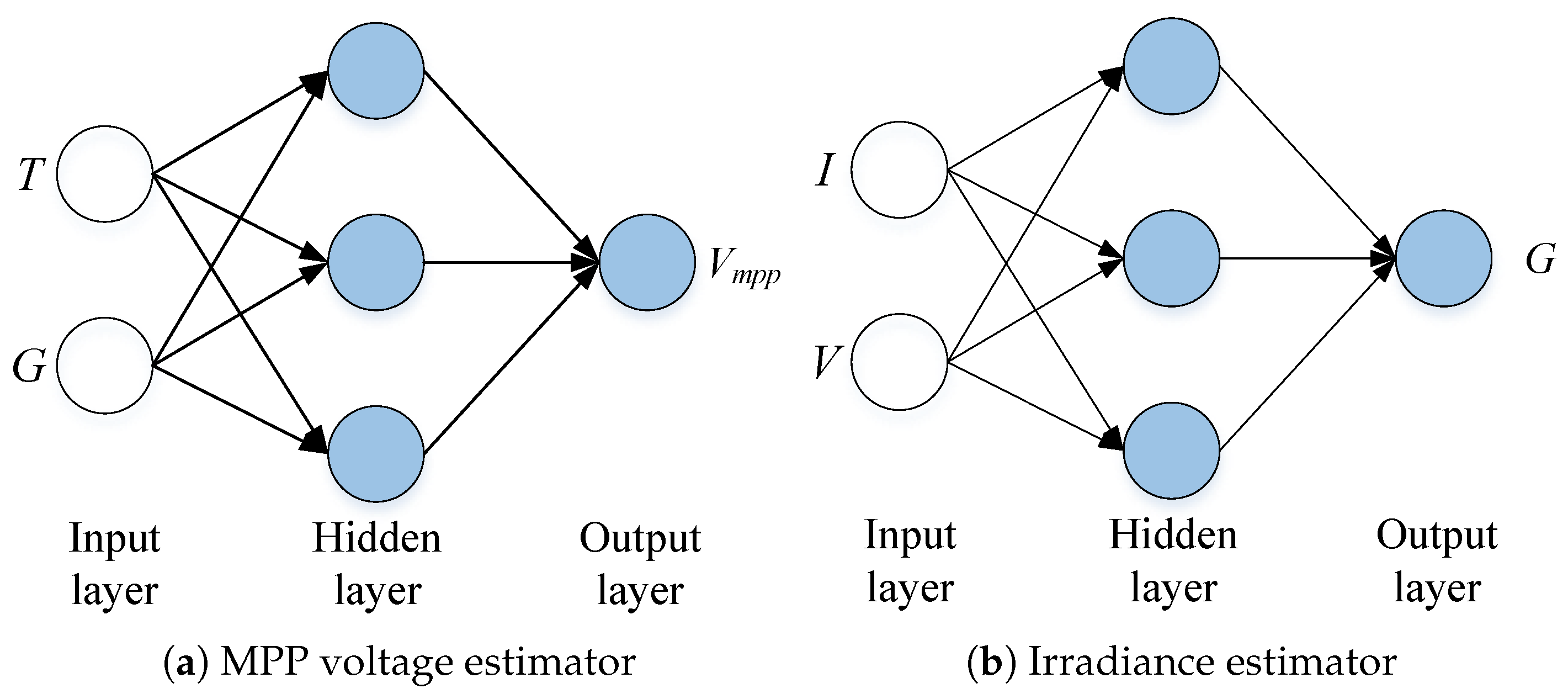
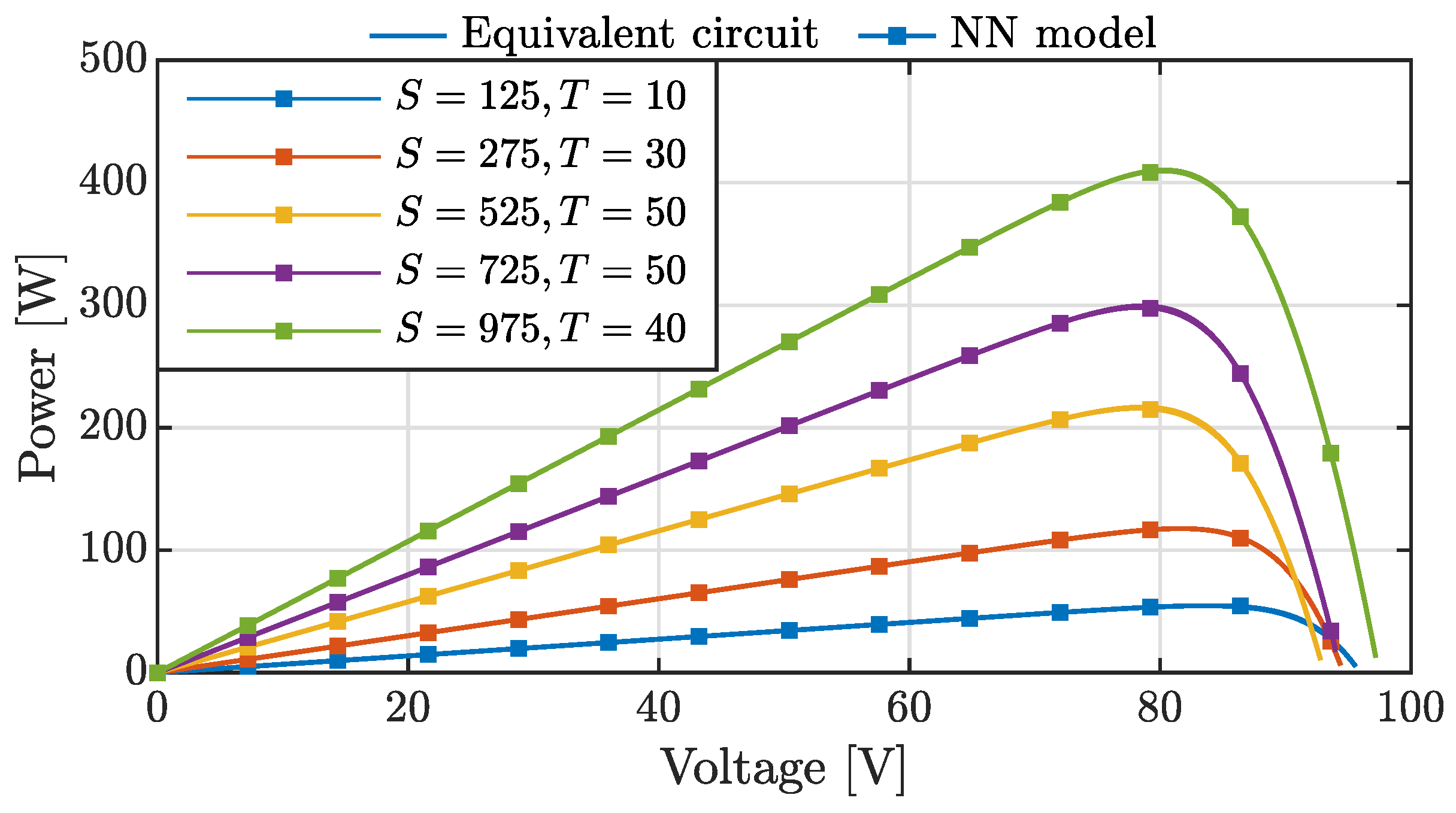
2.2. Neural Network Model of PV Module
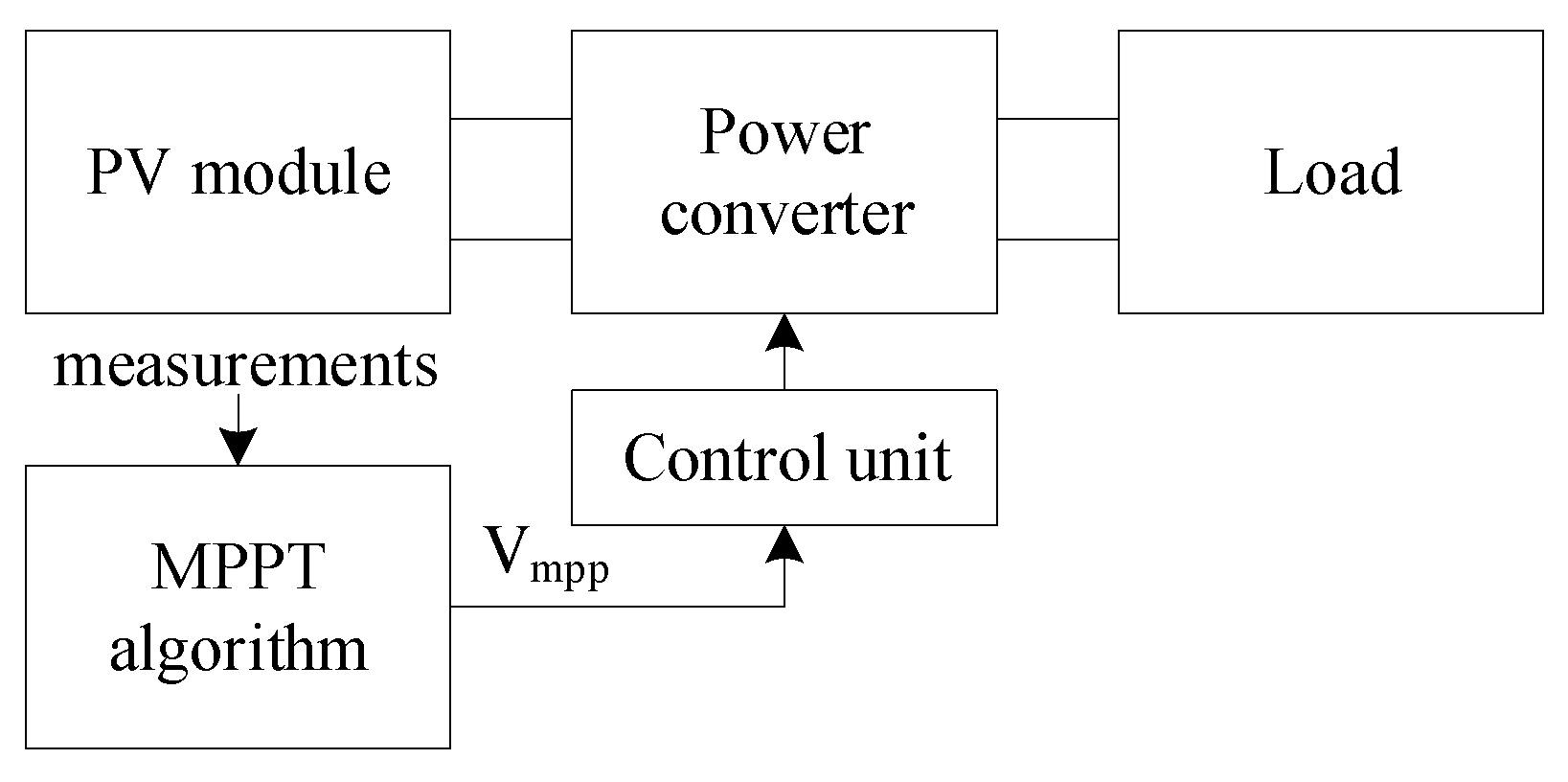
2.3. Overview of MPTT Algorithms
3. Proposed MPPT Algorithm and Irradiance Estimator
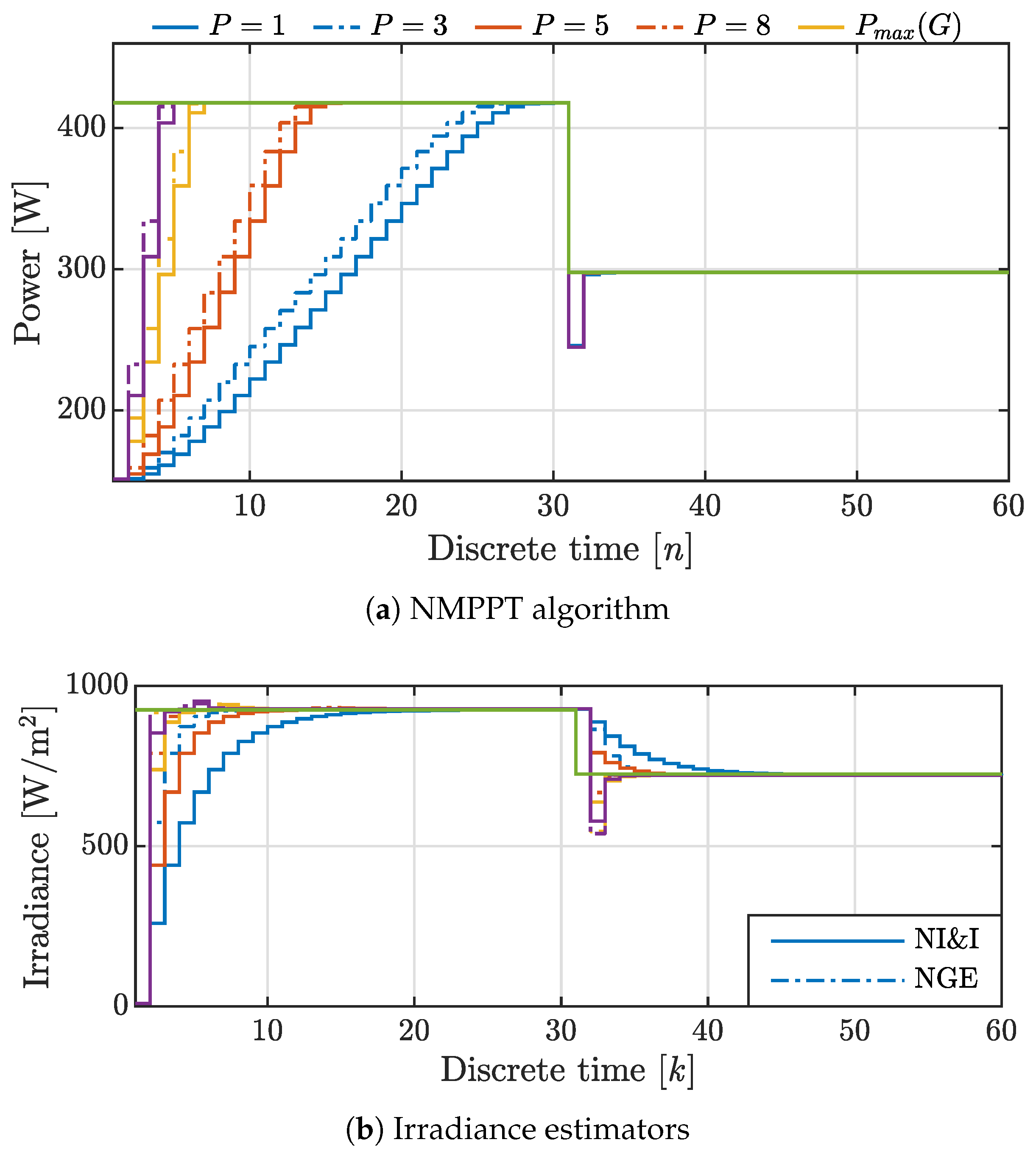
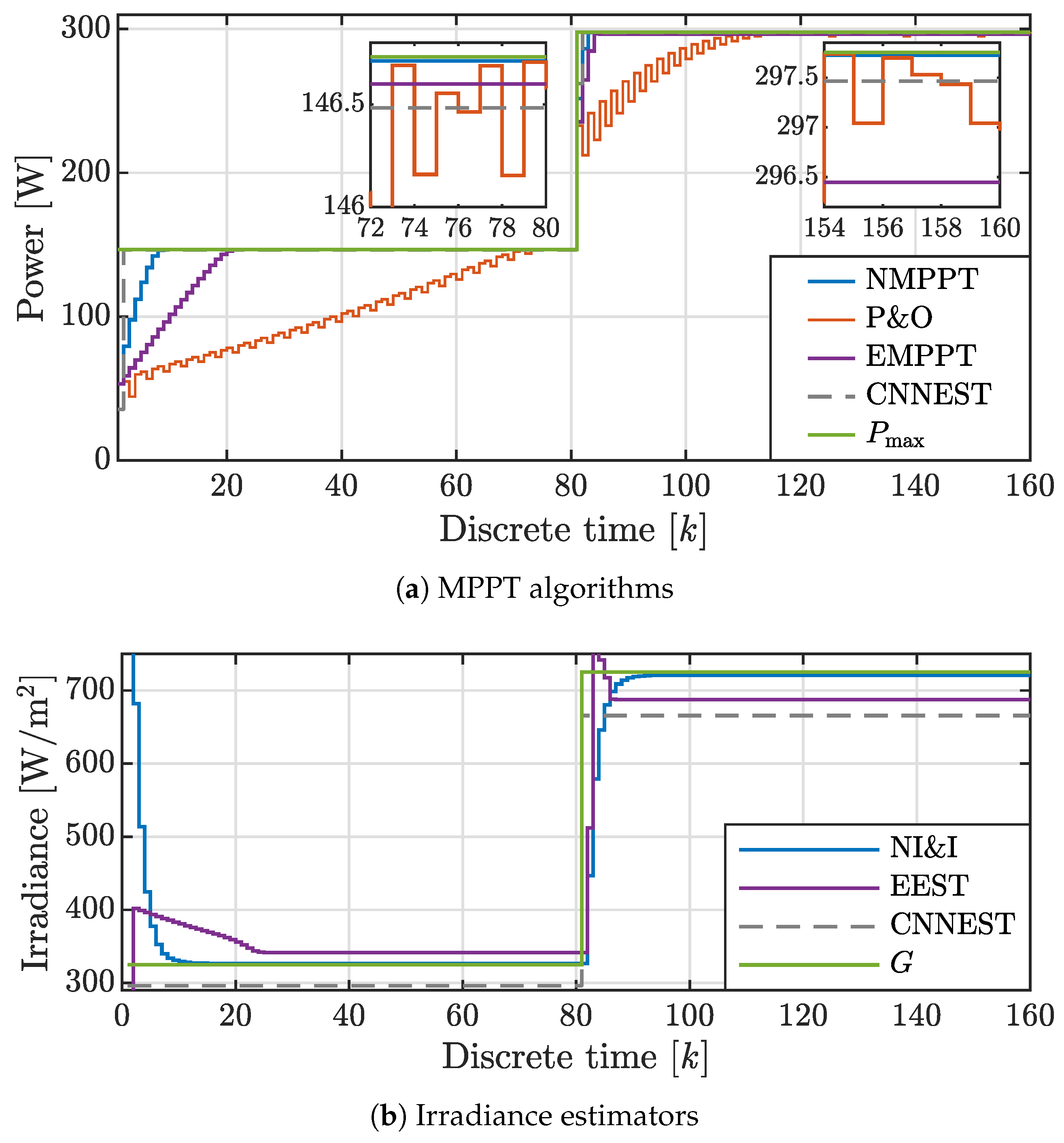
3.1. NMPPT Algorithm
3.2. Estimation of the Irradiance
3.3. Computational Complexity
| Algorithm 1 The Proposed Algorthm. |
| Initialization:, for each time instantk
|
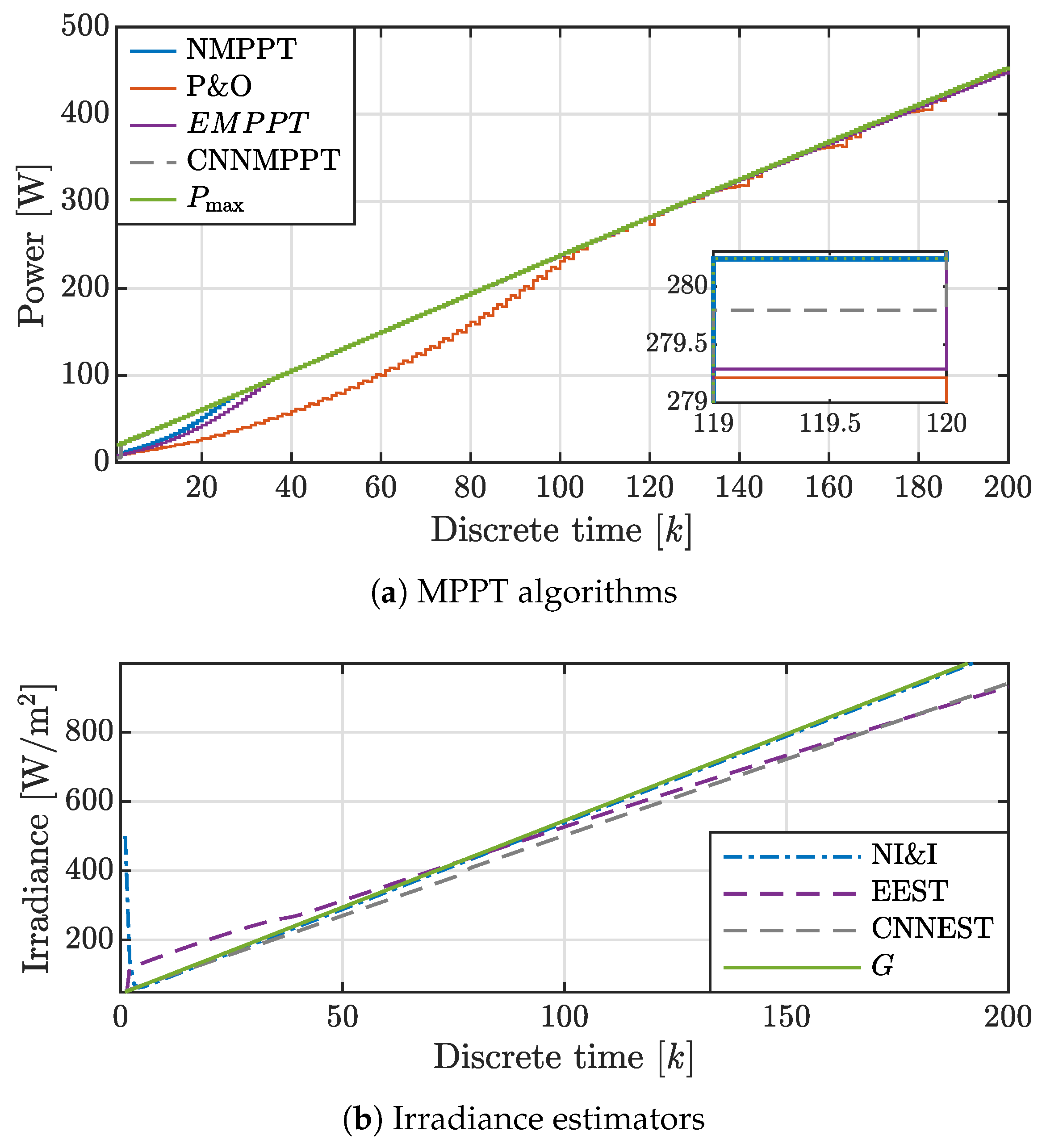
4. Simulation Results
4.1. Simulated Data
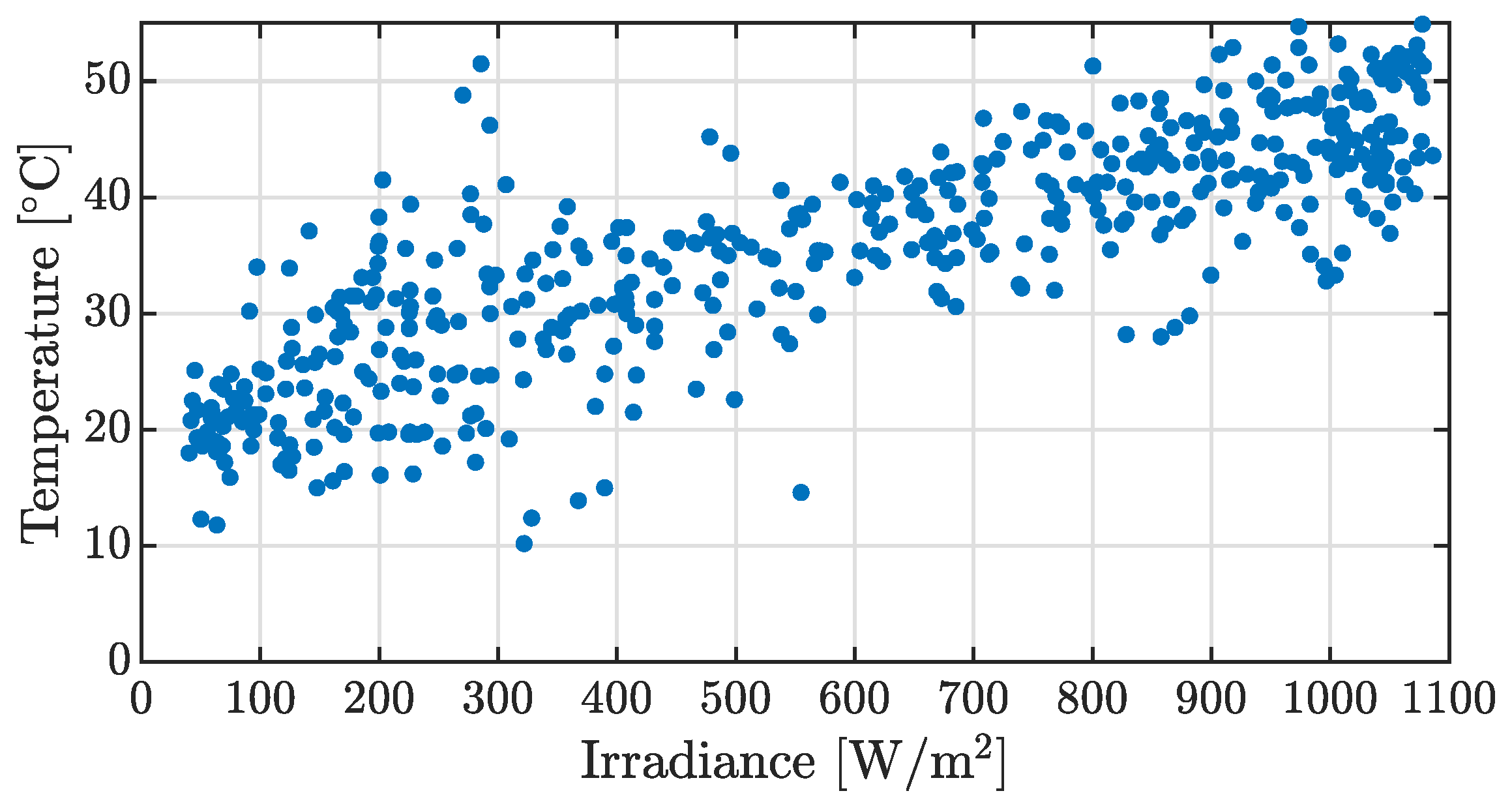
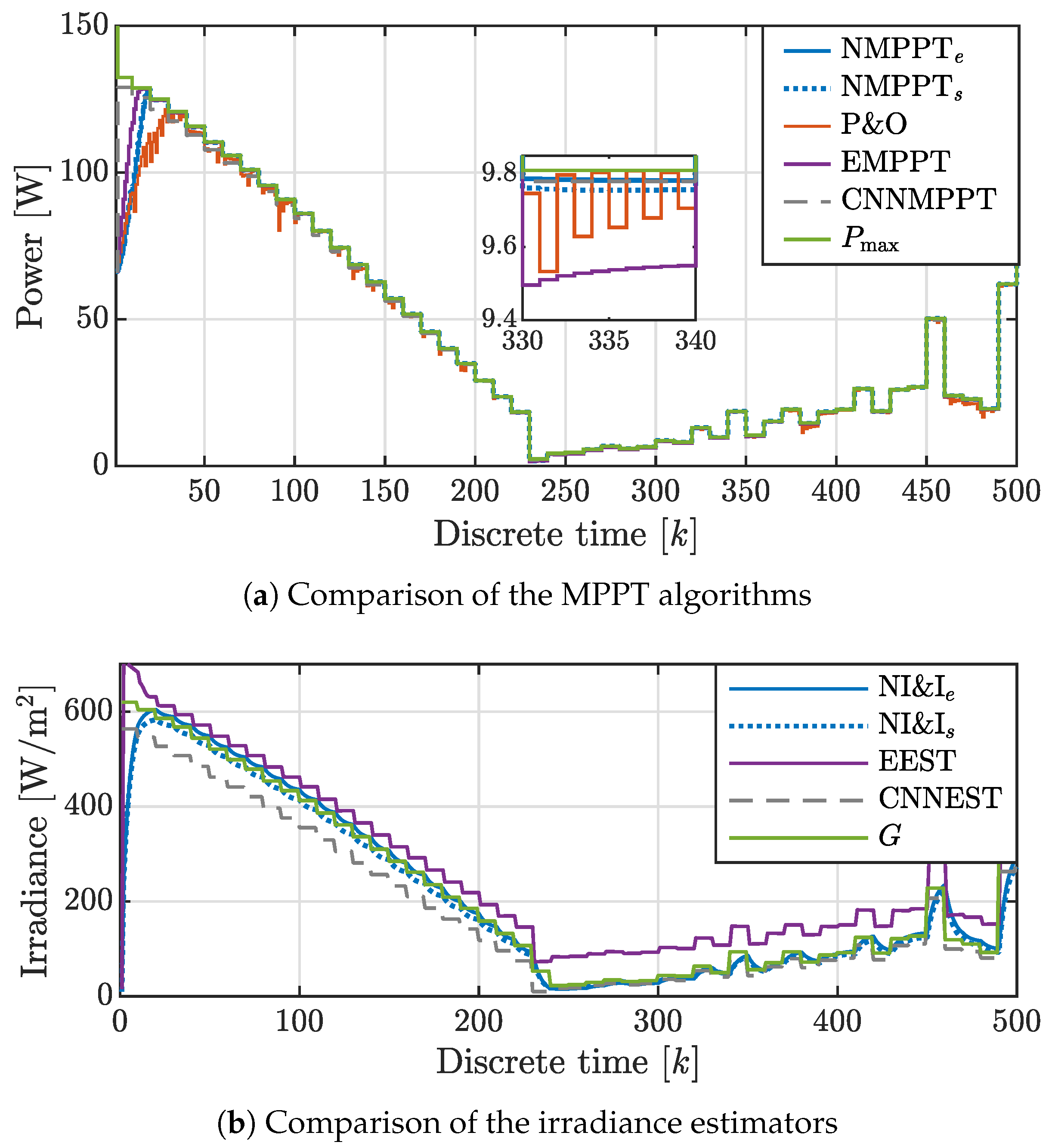
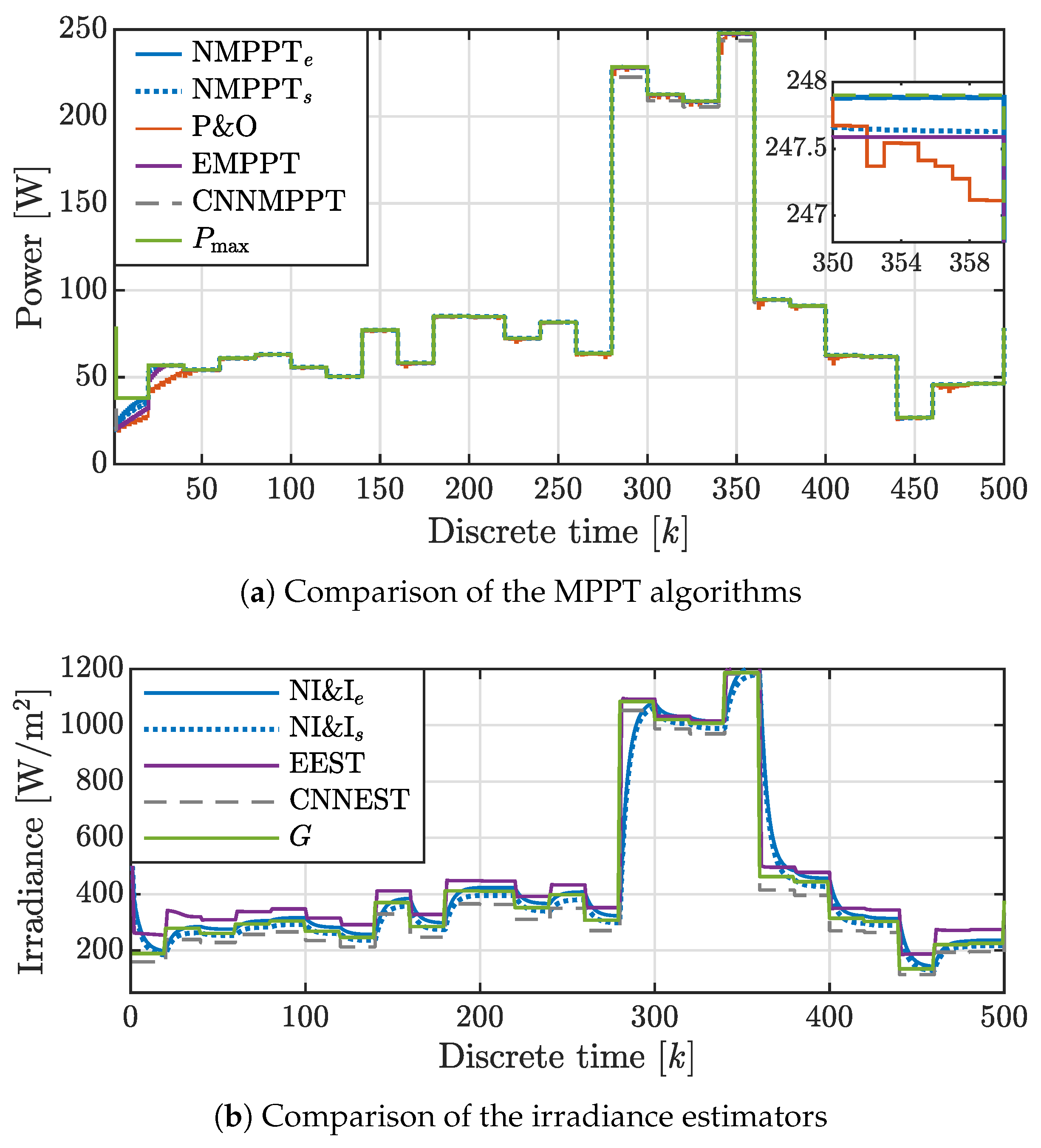
4.2. Experimental Data
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Laudani, A.; Mancilla-David, F.; Riganti-Fulginei, F.; Salvini, A. Reduced-form of the photovoltaic five-parameter model for efficient computation of parameters. Sol. Energy 2013, 97, 122–127. [Google Scholar] [CrossRef]
- Mahmoud, Y.; El-Saadany, E.F. Photovoltaic model with reduced computational time. IEEE Trans. Ind. Electron. 2015, 62, 3534–3544. [Google Scholar] [CrossRef]
- Chin, V.J.; Salam, Z.; Ishaque, K. An Accurate and fast computational algorithm for the two-diode model of PV module based on a hybrid method. IEEE Trans. Ind. Electron. 2017, 64, 6212–6222. [Google Scholar] [CrossRef]
- Stornelli, V.; Muttillo, M.; de Rubeis, T.; Nardi, I. A New Simplified Five-Parameter Estimation Method for Single-Diode Model of Photovoltaic Panels. Energies 2019, 12, 4271. [Google Scholar] [CrossRef]
- Laudani, A.; Riganti Fulginei, F.; Salvini, A. High performing extraction procedure for the one-diode model of a photovoltaic panel from experimental I-V curves by using reduced forms. Sol. Energy 2014, 103, 316–326. [Google Scholar] [CrossRef]
- Kang, T.; Yao, J.; Jin, M.; Yang, S.; Duong, T. A Novel Improved Cuckoo Search Algorithm for Parameter Estimation of Photovoltaic (PV) Models. Energies 2018, 11, 1060. [Google Scholar] [CrossRef]
- Javier Toledo, F.; Blanes, J.M.; Galiano, V. Two-Step Linear Least-Squares Method for Photovoltaic Single-Diode Model Parameters Extraction. IEEE Trans. Ind. Electron. 2018, 65, 6301–6308. [Google Scholar] [CrossRef]
- Huang, P.H.; Xiao, W.; Peng, J.C.; Kirtley, J.L. Comprehensive Parameterization of Solar Cell: Improved Accuracy with Simulation Efficiency. IEEE Trans. Ind. Electron. 2016, 63, 1549–1560. [Google Scholar] [CrossRef]
- Jain, A.; Sharma, S.; Kapoor, A. Solar cell array parameters using Lambert W-function. Sol. Energy Mater. Sol. Cells 2006, 90, 25–31. [Google Scholar] [CrossRef]
- Batzelis, E.I.; Routsolias, I.A.; Papathanassiou, S.A. An explicit pv string model based on the lambert w function and simplified mpp expressions for operation under partial shading. IEEE Trans. Sustain. Energy 2014, 5, 301–312. [Google Scholar] [CrossRef]
- Almonacid, F.; Fernandez, E.F.; Mellit, A.; Kalogirou, S. Review of techniques based on artificial neural networks for the electrical characterization of concentrator photovoltaic technology. Renew. Sustain. Energy Rev. 2017, 75, 938–953. [Google Scholar] [CrossRef]
- Castro, R. Data-driven PV modules modelling: Comparison between equivalent electric circuit and artificial intelligence based models. Sustain. Energy Technol. Assess. 2018, 30, 230–238. [Google Scholar] [CrossRef]
- Xu, X.; Zhang, X.; Huang, Z.; Xie, S.; Gu, W.; Wang, X.; Zhang, L.; Zhang, Z. Current Characteristics Estimation of Si PV Modules Based on Artificial Neural Network Modeling. Materials 2019, 12, 3037. [Google Scholar] [CrossRef] [PubMed]
- Khatib, T.; Ghareeb, A.; Tamimi, M.; Jaber, M.; Jaradat, S. A new offline method for extracting I-V characteristic curve for photovoltaic modules using artificial neural networks. Sol. Energy 2018, 173, 462–469. [Google Scholar] [CrossRef]
- Bonanno, F.; Capizzi, G.; Graditi, G.; Napoli, C.; Tina, G.M. A radial basis function neural network based approach for the electrical characteristics estimation of a photovoltaic module. Appl. Energy 2012, 97, 956–961. [Google Scholar] [CrossRef]
- Chen, Z.; Chen, Y.; Wu, L.; Cheng, S.; Lin, P.; You, L. Accurate modeling of photovoltaic modules using a 1-D deep residual network based on I-V characteristics. Energy Convers. Manag. 2019, 186, 168–187. [Google Scholar] [CrossRef]
- Ma, X.; Huang, W.H.; Schnabel, E.; Kohl, M.; Brynjarsdottir, J.; Braid, J.L.; French, R.H. Data-Driven $I$–$V$ Feature Extraction for Photovoltaic Modules. IEEE J. Photovolt. 2019, 9, 1405–1412. [Google Scholar] [CrossRef]
- Chikh, A.; Chandra, A. Adaptive neuro-fuzzy based solar cell model. IET Renew. Power Gener. 2014, 8, 679–686. [Google Scholar] [CrossRef]
- Mahmod Mohammad, A.N.; Mohd Radzi, M.A.; Azis, N.; Shafie, S.; Atiqi Mohd Zainuri, M.A. An Enhanced Adaptive Perturb and Observe Technique for Efficient Maximum Power Point Tracking Under Partial Shading Conditions. Appl. Sci. 2020, 10, 3912. [Google Scholar] [CrossRef]
- Kapić, A.; Zečević, Ž.; Krstajić, B. An efficient MPPT algorithm for PV modules under partial shading and sudden change in irradiance. In Proceedings of the 2018 23rd International Scientific-Professional Conference on Information Technology (IT), Zabljak, Montenegro, 19–24 February 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Erauskin, R.L.; Gonzalez, A.; Petrone, G.; Spagnuolo, G.; Gyselinck, J. Multi-Variable Perturb & Observe Algorithm for Grid-tied PV Systems with Joint Central and Distributed MPPT Configuration. IEEE Trans. Sustain. Energy 2020. [Google Scholar] [CrossRef]
- Bhattacharyya, S.; Patnam, D.S.K.; Samanta, S.; Mishra, S. Steady Output and Fast Tracking MPPT (SOFT MPPT) for P&O and InC Algorithms. IEEE Trans. Sustain. Energy 2020. [Google Scholar] [CrossRef]
- Zakzouk, N.E.; Elsaharty, M.A.; Abdelsalam, A.K.; Helal, A.A.; Williams, B.W. Improved performance low-cost incremental conductance PV MPPT technique. IET Renew. Power Gener. 2016, 10, 561–574. [Google Scholar] [CrossRef]
- Alsumiri, M. Residual Incremental Conductance Based Nonparametric MPPT Control for Solar Photovoltaic Energy Conversion System. IEEE Access 2019, 7, 87901–87906. [Google Scholar] [CrossRef]
- Dolara, A.; Grimaccia, F.; Mussetta, M.; Ogliari, E.; Leva, S. An Evolutionary-Based MPPT Algorithm for Photovoltaic Systems under Dynamic Partial Shading. Appl. Sci. 2018, 8, 558. [Google Scholar] [CrossRef]
- Li, W.; Zhang, G.; Pan, T.; Zhang, Z.; Geng, Y.; Wang, J. A Lipschitz Optimization-Based MPPT Algorithm for Photovoltaic System under Partial Shading Condition. IEEE Access 2019, 7, 126323–126333. [Google Scholar] [CrossRef]
- Ali, A.; Almutairi, K.; Malik, M.Z.; Irshad, K.; Tirth, V.; Algarni, S.; Zahir, M.H.; Islam, S.; Shafiullah, M.; Shukla, N.K. Review of Online and Soft Computing Maximum Power Point Tracking Techniques under Non-Uniform Solar Irradiation Conditions. Energies 2020, 13, 3256. [Google Scholar] [CrossRef]
- Mahmoud, Y.; Abdelwahed, M.; El-Saadany, E.F. An Enhanced MPPT Method Combining Model-Based and Heuristic Techniques. IEEE Trans. Sustain. Energy 2016, 7, 576–585. [Google Scholar] [CrossRef]
- Moshksar, E.; Ghanbari, T. A model-based algorithm for maximum power point tracking of PV systems using exact analytical solution of single-diode equivalent model. Sol. Energy 2018, 162, 117–131. [Google Scholar] [CrossRef]
- Elobaid, L.M.; Abdelsalam, A.K.; Zakzouk, E.E. Artificial neural network-based photovoltaic maximum power point tracking techniques: A survey. IET Renew. Power Gener. 2015, 9, 1043–1063. [Google Scholar] [CrossRef]
- Hiyama, T.; Kouzuma, S.; Imakubo, T.; Ortmeyer, T.H. Evaluation of Neural Network Based Real Time Maximum Power Tracking Controller for PV System. IEEE Trans. Energy Convers. 1995, 10, 543–548. [Google Scholar] [CrossRef]
- Ocran, T.A.; Cao, J.; Cao, B.; Sun, X. Artificial neural network maximum power point tracker for solar electric vehicle. Tsinghua Sci. Technol. 2005, 10, 204–208. [Google Scholar] [CrossRef]
- Gowid, S.; Massoud, A. A robust experimental-based artificial neural network approach for photovoltaic maximum power point identification considering electrical, thermal and meteorological impact. Alex. Eng. J. 2020. [Google Scholar] [CrossRef]
- Sedaghati, F.; Nahavandi, A.; Badamchizadeh, M.A.; Ghaemi, S.; Abedinpour Fallah, M. PV maximum power-point tracking by using artificial neural network. Math. Probl. Eng. 2012, 2012. [Google Scholar] [CrossRef]
- Essefi, R.M.; Souissi, M.; Abdallah, H.H. Maximum Power Point Tracking Control Using Neural Networks for Stand-Alone Photovoltaic Systems. Int. J. Mod. Nonlinear Theory Appl. 2014, 3, 53–65. [Google Scholar] [CrossRef]
- Rolevski, M.; Zecevic, Z. MPPT controller based on the neural network model of the photovoltaic panel. In Proceedings of the 2020 24th International Conference on Information Technology (IT), Zabljak, Montenegro, 18–22 February 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Rizzo, S.A.; Scelba, G. ANN based MPPT method for rapidly variable shading conditions. Appl. Energy 2015, 145, 124–132. [Google Scholar] [CrossRef]
- Elobaid, L.M.; Abdelsalam, A.K.; Zakzouk, E.E. Artificial neural network based maximum power point tracking technique for PV systems. In Proceedings of the IECON 2012—38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 937–942. [Google Scholar] [CrossRef]
- Chikh, A.; Chandra, A. An Optimal Maximum Power Point Tracking Algorithm for PV Systems with Climatic Parameters Estimation. IEEE Trans. Sustain. Energy 2015, 6, 644–652. [Google Scholar] [CrossRef]
- Mancilla-David, F.; Riganti-Fulginei, F.; Laudani, A.; Salvini, A. A Neural Network-Based Low-Cost Solar Irradiance Sensor. IEEE Trans. Instrum. Meas. 2014, 63, 583–591. [Google Scholar] [CrossRef]
- Carrasco, M.; Mancilla-David, F.; Ortega, R. An estimator of solar irradiance in photovoltaic arrays with guaranteed stability properties. IEEE Trans. Ind. Electron. 2014, 61, 3359–3366. [Google Scholar] [CrossRef]
- Yilmaz, U.; Turksoy, O.; Teke, A. Improved MPPT method to increase accuracy and speed in photovoltaic systems under variable atmospheric conditions. Int. J. Electr. Power Energy Syst. 2019, 113, 634–651. [Google Scholar] [CrossRef]
- Bendib, B.; Krim, F.; Belmili, H.; Almi, M.F.; Bolouma, S. An intelligent MPPT approach based on neural-network voltage estimator and fuzzy controller, applied to a stand-alone PV system. In Proceedings of the 2014 IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 June 2014; pp. 404–409. [Google Scholar] [CrossRef]
- Çelik, Ö.; Teke, A. A Hybrid MPPT method for grid connected photovoltaic systems under rapidly changing atmospheric conditions. Electr. Power Syst. Res. 2017, 152, 194–210. [Google Scholar] [CrossRef]
- Marion, B.; Anderberg, A.; Deline, C.; del Cueto, J.; Muller, M.; Perrin, G.; Rodriguez, J.; Rummel, S.; Silverman, T.J.; Vignola, F.; et al. New data set for validating PV module performance models. In Proceedings of the 2014 IEEE 40th Photovoltaic Specialist Conference (PVSC), Denver, CO, USA, 8–13 June 2014; pp. 1362–1366. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| k | G | Prediction Error (%) | ||||
|---|---|---|---|---|---|---|
| NMPPT | P&O | EMPPT | CNNMPT | |||
| 20 | 140 | 59.429 | 18.881 | 32.397 | 56.772 | 0.251 |
| 40 | 240 | 103.593 | 0.004 | 0.011 | 46.72 | 0.003 |
| 60 | 340 | 147.954 | 0.002 | 0.089 | 31.677 | 0.084 |
| 80 | 440 | 192.26 | 0.001 | 0.148 | 18.353 | 0.148 |
| 100 | 540 | 236.382 | 0.0001 | 0.224 | 6.007 | 0.171 |
| 120 | 640 | 280.24 | 0.001 | 0.339 | 0.366 | 0.159 |
| 140 | 740 | 323.775 | 0.0001 | 0.485 | 2.118 | 0.124 |
| 160 | 840 | 366.95 | 0.001 | 0.668 | 1.509 | 0.079 |
| 180 | 940 | 409.733 | 0.0001 | 0.885 | 1.708 | 0.036 |
| 200 | 1040 | 452.106 | 0.001 | 1.138 | 1.004 | 0.008 |
| G | Prediction Error (%) | |||||
|---|---|---|---|---|---|---|
| NMPPT | NMPPT | EMPPT | P&O | CNNMPT | ||
| 110.2 | 22.77 | 0.06 | 0.082 | 0.408 | 1.856 | 1.834 |
| 132.2 | 23.635 | 0.099 | 0.064 | 0.218 | 0.187 | 0.712 |
| 225.1 | 46.391 | 0.003 | 0.012 | 0.097 | 0.11 | 0.177 |
| 260.5 | 54.285 | 0.007 | 0.007 | 0.058 | 0.321 | 0.536 |
| 302.9 | 61.845 | 0.004 | 0.012 | 0.046 | 0.117 | 0.537 |
| 369.9 | 77.121 | 0.01 | 0.002 | 0.023 | 0.291 | 0.333 |
| 409.7 | 84.877 | 0.001 | 0.001 | 0.005 | 0.24 | 0.43 |
| 523.5 | 111.36 | 0.009 | 0.051 | 0.064 | 0.6328 | 0.016 |
| 613.3 | 120.578 | 0.006 | 0.267 | 0.023 | 0.027 | 0.04 |
| 653.8 | 133.64 | 0.007 | 0.01 | 0.016 | 1.746 | 0.046 |
| 713.40 | 153.97 | 0.0004 | 0.2259 | 0.2473 | 0.2680 | 0.9709 |
| 859.5 | 171.037 | 0.0001 | 0.005 | 0.002 | 0.006 | 0.262 |
| 946.8 | 198.125 | 0.001 | 0.142 | 0.163 | 0.72 | 0.572 |
| 1007.1 | 208.772 | 0.004 | 0.06 | 0.07 | 0.123 | 1.581 |
| 1084.3 | 228.473 | 0.003 | 0.173 | 0.118 | 0.209 | 2.586 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zečević, Ž.; Rolevski, M. Neural Network Approach to MPPT Control and Irradiance Estimation. Appl. Sci. 2020, 10, 5051. https://doi.org/10.3390/app10155051
Zečević Ž, Rolevski M. Neural Network Approach to MPPT Control and Irradiance Estimation. Applied Sciences. 2020; 10(15):5051. https://doi.org/10.3390/app10155051
Chicago/Turabian StyleZečević, Žarko, and Maja Rolevski. 2020. "Neural Network Approach to MPPT Control and Irradiance Estimation" Applied Sciences 10, no. 15: 5051. https://doi.org/10.3390/app10155051
APA StyleZečević, Ž., & Rolevski, M. (2020). Neural Network Approach to MPPT Control and Irradiance Estimation. Applied Sciences, 10(15), 5051. https://doi.org/10.3390/app10155051