1. Introduction
Finite element model with high accuracy plays an important role in structural dynamics design, which is the premise of dynamic response prediction, vibration control, and structural optimization [
1,
2,
3]. Due to the idealization hypothesis of structural simplification, the errors of structural parameters, and the errors of finite element (FE) discretization, the FE models may not accurately reflect the dynamics performance of the structures [
4,
5,
6]. With the rapid development of numerical simulation in engineering applications, model updating methods gradually revealed its importance, which makes the dynamic characteristics of the theoretical model as consistent as possible with the actual structure.
As a bond between FE models and actual structures, model updating has become a powerful tool and which has been paid extensive attention [
7,
8]. Many types of approaches have been developed for a variety of problems. Shabbir et al. [
9] proposed a method based on particle swarm optimization to update the FE model by using sequence niche technology, which greatly improved the reliability of finding the global minimum; Behmanesh et al. [
10] proposed a new probabilistic FE model updating method based on hierarchical Bayesian modeling for identification of structural parameters under varying environmental conditions. Taking the strain mode as the target response, Zhan and Guo et al. [
11] constructed the target function to be updated by using the strain mode frequency and modal confidence errors, the parameters were updated by using the Genetic Algorithm. Aiming at the model updating of the nonlinear structure, Wang and Ren et al. [
12] took the instantaneous characteristics, including instantaneous frequency and instantaneous amplitude, as the objective function of the nonlinear model updating, and used the annealing global optimization method to obtain the optimal value of the nonlinear parameters. Zang et al. [
13] proposed a model updating method that separated the non-linear characteristics of subsystem from the parameter uncertainties to establishing a representative linear mathematical model and applied it to a structural dynamics verification problem which developed by Sandia National Laboratory. The above methods focus on the recent hot spots to carry out research, frequency response function (FRF)’s based model updating is an alternative method with some advantages, FRFs can adequately reflect the dynamic characteristics of a structure, using which as the feature will get rid of modal identification.
Model updating based on FRFs avoids the error caused by modal fitting, and match of the predicted modal shapes with the measured data are not necessary, so it is suitable for structural updating with relatively dense modal distribution. Shadan et al. [
14,
15] proposed a new structural damage detection method based on FRFs data and natural frequencies, adopted pseudo-linear sensitivity equation to accurately identify the location and severity of damage; Esfandiari et al. [
16,
17] proposed an estimation method for structure mass and stiffness considering damping effect and using the FRF data for FE model updating; Pradhan et al. [
18] proposed a FE model updating method that can identify and update the damping matrix of the system, and studied the updating capability of different damping levels through three different experimental beam structures; Li et al. [
19] proposed an iterative method combining model updating method with model reduction technology, effectively improved the efficiency of the updating; Hong et al. [
20] successfully updated the stiffness, mass and damping parameters between the analytical and the experimental FRFs through the laboratory test of the four-story shear frame structure; Wang et al. [
21,
22] conducted the model updating of local nonlinear structure based on the initial FE model of the structure and the primary harmonic response data obtained from low amplitude and high amplitude excitation. The above scholars have done a lot of research on the model updating based on FRFs. However, the selection of parameters plays a significant role in the progress of model updating. The sensitivity of the FRFs has great potential for a vibration analysis, which is not involved in the above methods. Reasonable selection of parameters can effectively improve the quality and efficiency of model updating, which is inseparable from the sensitivity analysis of the parameters, so model updating method based on the sensitivity of FRFs has more important significance.
The model updating based on the sensitivity of FRFs attracted wide attention in the early 1990′s [
23]. Sipple et al. [
24] proposed a new FE model updating method that uses numerical sensitivity instead of analytical sensitivity to solve inverse problems, which does not need model reduction and data extension, and has good robustness, stability and fault tolerance; Weng et al. [
25] proposed a new iterative substructuring method to accurately obtain the characteristic solution and characteristic sensitivity of the structure, which is suitable for model updating of large and complex structures; Jiang et al. [
26] expressed the thermal dependent elastic constants and thermal expansion coefficients as intermediate function by temperature independent variables, and used the perturbation method to calculate the sensitivity for parameter identification; On the basis of the basic concept of unconstrained optimization problem and three regularization solutions, Mohammad et al. [
27] proposed a novel sensitivity based FE model updating method, and simultaneously updated the element mass matrix and stiffness matrix of the FE model; Esfandiari et al. [
28] proposed a FE model updating method using incomplete strain data in frequency domain to detect variations in stiffness and mass parameters. The common sensitivity analysis methods using FRFs are the finite difference method [
29] or the combined approximations (CAs) method [
30]. These methods are based on obtaining the stiffness matrix, damping matrix, and mass matrix of the structures. The disadvantage of these methods is that repeated analysis is required in the process of structural parameter identification, and they are not applicable under the premise of unknown dynamic stiffness matrix. For example, the modal parameters of the structure can be obtained through experiments, but the complete information of the dynamic stiffness matrix is difficult to obtain. The Sherman–Morrison formula was first proposed by Sherman and Morrison and it can be used to represent the varying of matrix; Turan et al. [
31] used the Sherman–Morrison formula of singular value decomposition to calculate the optimal perturbation of the sensitivity value of the extreme value and the design variable, thus achieving the response change that is difficult to obtain with the response derivatives; Zhu et al. [
32,
33,
34,
35] used the Sherman–Morrison formula for mass elimination of multi-transducers, and the revised FRFs results were in good agreement with the target values.
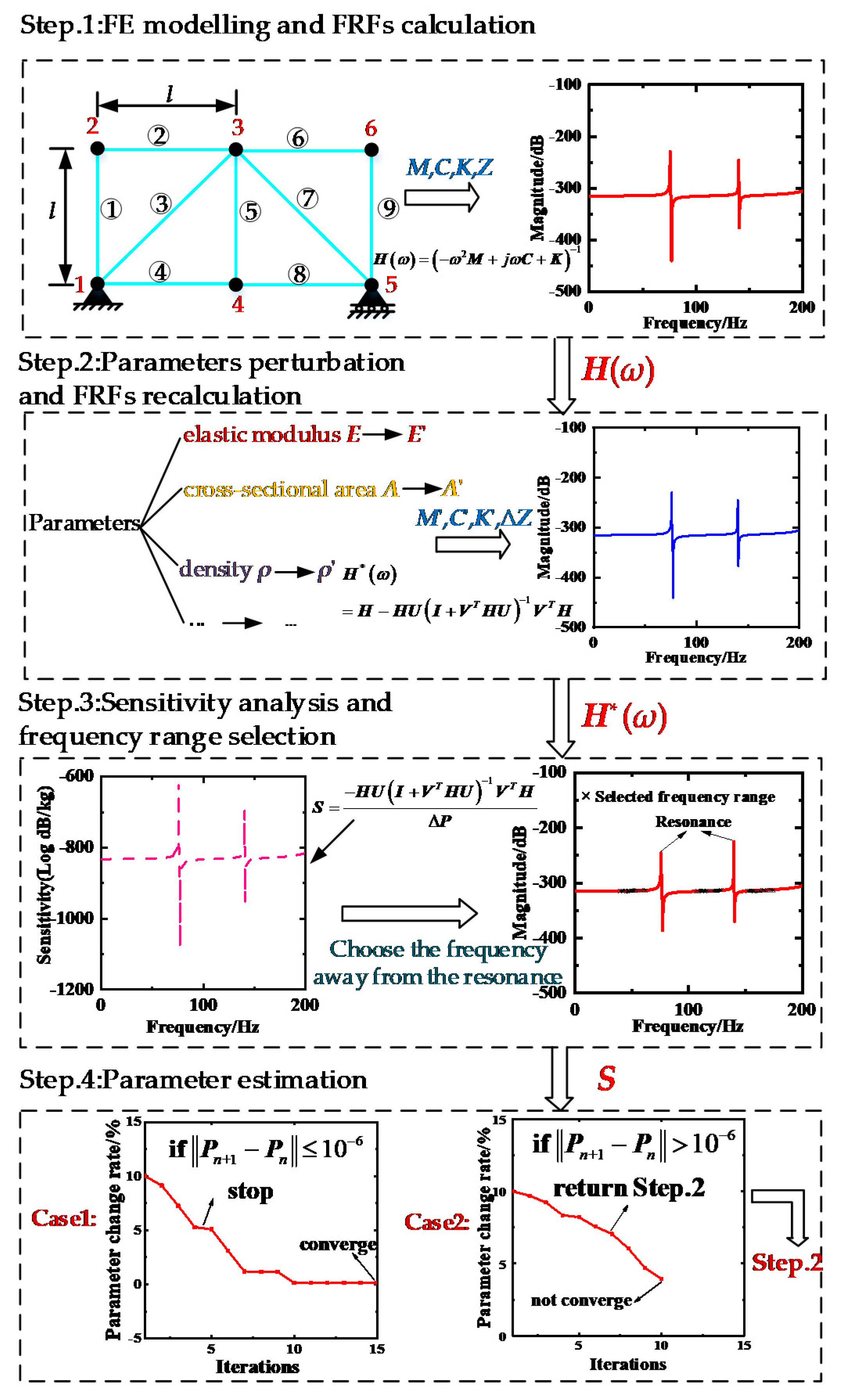
In this study, a model updating method using FRFs based on Sherman–Morrison formula is proposed, only the initial FRFs and parameter perturbations are employed to calculate the sensitivity avoiding repeated FE analyses and calculations, which improves the computational efficiency of model updating. The detail formulation of sensitivity analysis and model updating based on Sherman–Morrison formula is introduced in
Section 2, the implementation procedure of the model updating is described in
Section 3, and the numerical examples of a planar truss and a solar wing and the experiment of aluminum solar panel frame are used to verify the proposed method in
Section 4. The conclusions are summarized in
Section 5.
2. Theoretical Analysis
This section verifies that the model updating method using FRFs based on Sherman–Morrison formula can obtain the sensitivity of the FRFs to the parameters only by initial FRFs and parameter perturbations, which can avoid repeated finite element analyses and calculations.
2.1. Sensitivity Analysis Based on SMW
The dynamic equation of the multi-degrees-of-freedom system in the frequency domain can be expressed as
where
M is the mass matrix,
K is the stiffness matrix,
C is the damping matrix,
x(
ω) and
F(
ω) are the Fourier transformation of displacement response and excitation force, respectively.
The dynamic stiffness matrix
Z(
ω) of the system is
The relation between FRFs
H(
ω) and dynamic stiffness matrix
Z(
ω) is
If the FRFs data
H(
ω) of the system is a function of a design parameter
Pm, then the sensitivity
S of the FRFs data
H(
ω) of the system is the first partial derivative of the FRFs with respect to the design parameter is
, which be expressed as
According to the formula, the variation of FRFs is the variation of dynamic stiffness. For a specific frequency
ωr, it can be obtained from Equation (4) that the first derivative of dynamic stiffness with respect to a variable
Pm is:
Equation (5) can be expressed in differential form as
where
δZ,
δM,
δC, and
δK represent the variations of dynamic stiffness matrix, mass matrix, damping matrix, and stiffness matrix, respectively.
However, the damping of the structure is related to the material performance of individual members and the difference of FE modeling. The influence of damping on the FRF amplitude is significant in resonance and decreases rapidly as the damping moves away from resonance. Therefore, the selection of appropriate frequency range can mitigate the impact of damping on the model updating results.
We assume that a system of
n-degrees of freedom is subject to mass perturbation
δmi at the
ith-degree of freedom, and stiffness perturbation
δki at the
jth-degree of freedom [
32], the perturbations of the mass matrix
δM and the stiffness matrix
δK can be expressed as
We can rewrite the perturbations of the mass matrix
δM and the stiffness matrix
δK as
Where
u and
v represent the nodes on each side of the unit.
Guv and
Xuv are expressed as
Therefore, the variation of the system dynamic stiffness matrix
δZ can be expressed as
The inverse for the variation of dynamic stiffness matrix
δZ which is the variation of FRFs
δH is obtained by applying the Sherman–Morrison formula
where
L is a 2
N × 2
N matrix given by
By substituting Equation (13) into Equation (4), the sensitivity of the FRFs with respect to perturbation parameters can be obtained. Therefore, the sensitivity of FRFs to the perturbation parameters can be directly solved by only the initial FRFs and parameter perturbations to avoid repeated FE analyses and calculations.
The FRFs
H*(
ω) of the system changed by parameter perturbation can be obtained according to Sherman–Morrison formula:
Therefore, the sensitivity of FRFs based on Sherman–Morrison formula can be expressed as
where
Z*(
ω) is the dynamic stiffness matrix changed by parameter perturbation, Δ
Z(
ω) is the variation of the dynamic stiffness matrix, which is caused by the change quantity Δ
P, and Δ
Z(
ω) can be decomposed into two matrices
U(
ω) and
VT(
ω),
I is the
n-order identity matrix.
2.2. Frequency Response Function (FRF)’s Model Updating Based on Sensitivity Analysis
The purpose of the model updating is to minimize the difference of FRFs between the experimental and the FE model. The difference between the FRFs of experimental model
H*(
ω) and the FRFs of FE model
H(
ω) are used to construct the objective function as follows:
where
δ is the difference between the experimental FRFs and the corresponding analysis values, which is called the residual vector.
Equation (4) is rewritten as:
and
where the changes of the total mass matrix Δ
M and the total stiffness matrix Δ
K of the structure can be expressed by the sum of partial derivatives of each updating element:
where
nm and
ns are the total number of mass and stiffness updating units, and Δ
PiM represents the change of the
ith mass updating parameter, Δ
PjS represents the change of the
jth stiffness updating parameter.
By substituting Equations (21) and (22) into Equation (20), and setting Δ
C = 0, which means ignoring the updating of damping parameter
Equation (23) is rewritten as follows
where
SM and
SS are the sensitivity matrix of mass and stiffness, respectively,
S is the sensitivity matrix. Δ
PM and Δ
PS are the variation of mass and stiffness parameters, and Δ
P is the vector of all the variation of stiffness and mass parameters.
The model updating of parameters is an iterative process of convergence, and the regularization process is required to solve Equation (24). Generally, the following estimation criteria are obtained by adding constraint information for the variation of updating parameters:
where
λ2 is the regularization parameter whose value can be determined by the
L-curve method.
It can be obtained that the estimated variation of the updating parameters according to Equation (25):
Therefore, the iterative formula of the updating parameters is:
where
n and
n + 1, respectively, represents the values corresponding to the analysis model in the iteration of step
n and
n + 1.
Therefore, the core of the model updating is how to establish the sensitivity matrix S. It is not difficult to find from Equations (4) and (5) that for multi-degree-of-freedom systems, the solution of the sensitivity matrix problem finally boils down to the sensitivity of the system mass and stiffness to the design parameters.
Conducting the model updating progress by the obtained sensitivity S, and the FRFs was iteratively updated by using Equation (27) to obtain the finite element model consistent with the actual structure. A simulation example of a truss and a solar wing is used to verify the effectiveness of this method in this paper.
2.3. Frequency Range Selection
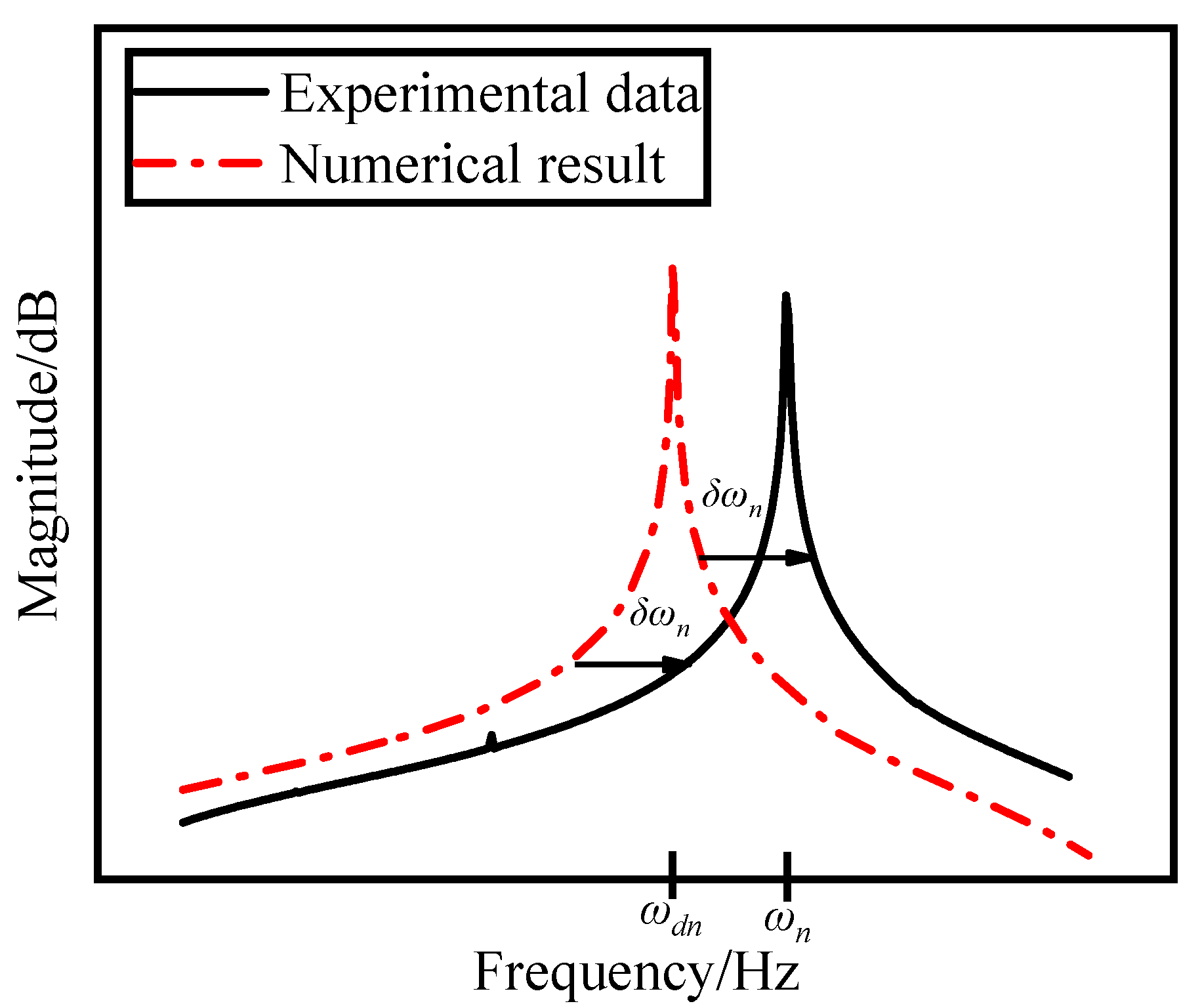
The FRFs of the real experimental model and the FE model around the
nth natural frequency is shown in
Figure 1. The modeling errors will cause the FRFs of the same mode order to move along the coordinate axis to a certain extent, but the basic shape does not change significantly.
The approximate estimation of the FRFs
Hd(
ω) near the resonance region can be expressed as
where
where,
ωn and
ωdn are the
nth natural frequency of the real experimental model and the FE model, respectively,
δωn is the frequency variation of the real experimental model and the FE model, and
m is the order of the natural frequency taken by simulation.
The frequency range of model updating is expressed as ‘
’. According to Equations (28) and (29),
Hd(
ω) on ‘
’ can be approximately expressed as
After repeated iterative calculations, the structural parameters of the FE model will be constantly updated and gradually approach to the parameters of the real experimental model. Therefore, in Equations (28) and (29), the initial frequency ωn and FRFs H(ω) will be constantly updated iteratively and converge to the natural frequency and FRFs of the real experimental model.
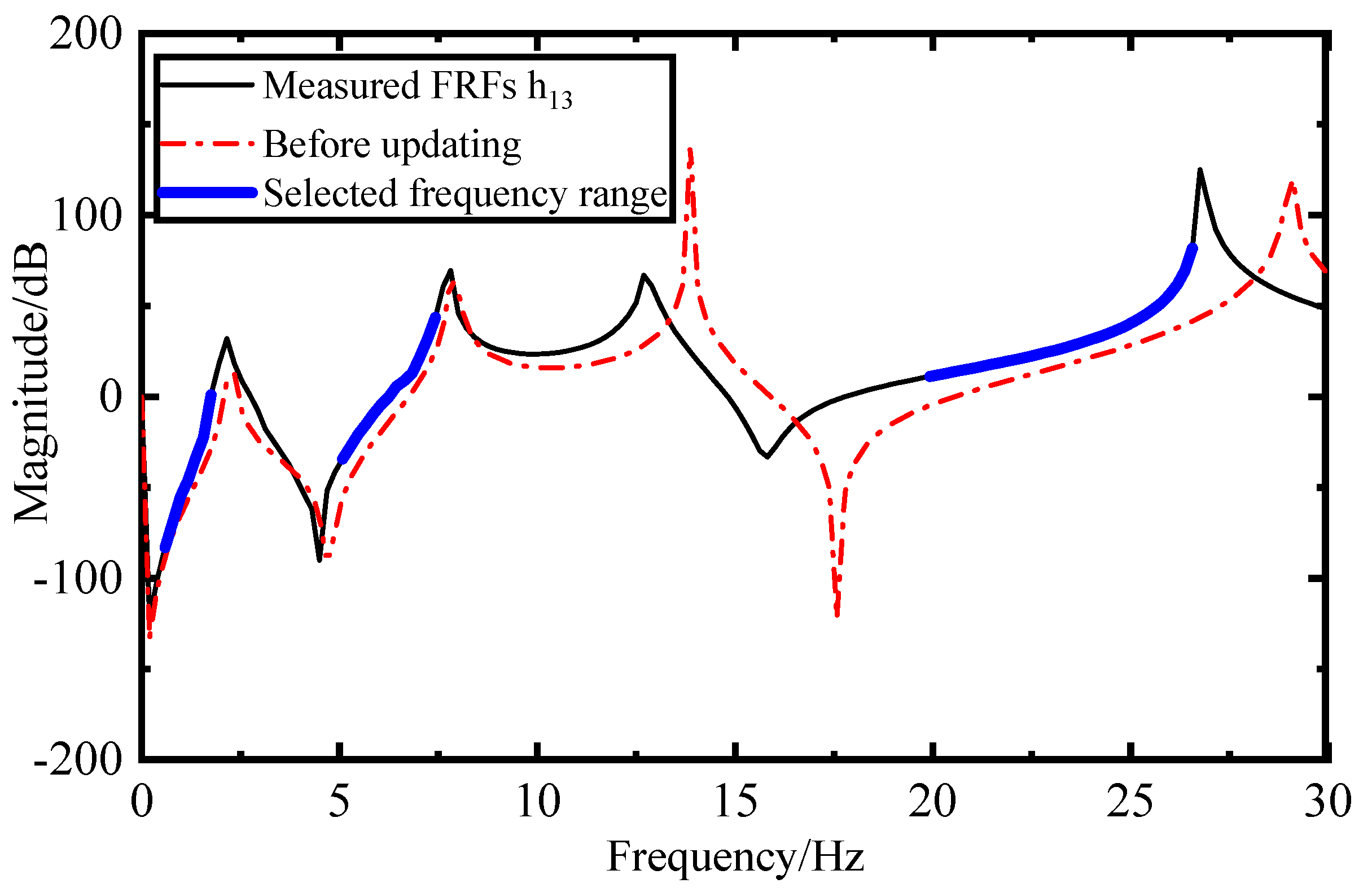
At present, most of the damping models cannot accurately simulate the actual damping effect but will increase the model errors and affect the result of model updating. Therefore, the damping parameter is not updated in this paper, so the influence of structural damping on the result of model updating should be reduced. From the analysis in
Section 2.2, the damping has little effect on the frequency response amplitude when far away from the resonance peak. Therefore, the selection of appropriate frequency range can alleviate the influence of damping on the results of model updating, and the influence of damping can be ignored when the model is updated based on FRFs. The frequency close to resonance would be affected by damping, so the small region of about 4Hz around resonance was not considered in the model updating process [
14].
If the two adjacent resonant peaks are too close to each other, the variation of FRFs in the frequency band between them cannot be guaranteed to decrease monotonically in the updating process, so this region is excluded to avoid the amplitude nonlinear problem. In each iteration, the frequency range also needs to be adjusted according to the change of the resonance point.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











