Models of the reference signal measurement path, disturbance path, acoustical disturbance path, secondary path, secondary path control signal part, and error signal measurement path used in the first two simulation case studies are simplified to focus on properties of the presented new FeFxLMS control system structure. In the third simulation case study the corresponding models identified in the laboratory room are used. All models used in simulations are FIR filters with 100 coefficients.
It is assumed in the presented below simulation case studies that: The active noise control systems operate with the constant sampling frequency equal to 500 Hz; an acoustic feedback between the control loudspeaker and the reference microphone is perfectly canceled; simulations started from the time instant 0 and adaptation is activated at the iteration number 1000; the number of FIR filter coefficients is equal to 50 and are tuned online using the LMS algorithm from initial values equal to 0; parameter (convergence coefficient) is chosen individually for each simulation experiment, the same for both control system structures; the number of FIR filter coefficients is 100 and the value of parameter is equal to 50; and the same realizations of the noise to be attenuated are used to simulate the classical FxLMS and new FeFxLMS control system structures. Additionally, the same model is used to simulate the secondary path and as a model of secondary path. The dynamics of the error microphone present in the error signal measurement path as well as dynamics of the amplifier are omitted in the simulations: It is assumed that dynamics of the error signal measurement path is represented only by dynamics of the antialiasing filter. Such a simplification has no influence on general conclusions drawn. To run the new FeFxLMS control system structure with an estimation of signal values at the error microphone the coefficients of the filter are calculated with equalization methods.
With given (offline identified) models of the disturbance, secondary and error signal measurement paths corresponding to the acoustical disturbance path and secondary path control signal part are calculated using model identification algorithms as well as the model of the error signal measurement path. All FIR models obtained in this way are truncated to 100 coefficients.
Noise reduction obtained in the simulation case studies is estimated as a ratio of the mean square values of the discrete-time signals at the error microphone without and the active noise control system, expressed in dB. Its calculation is performed for the last 10% of the signals after all transients implied by initial conditions have decayed.
4.1. Case Study 1
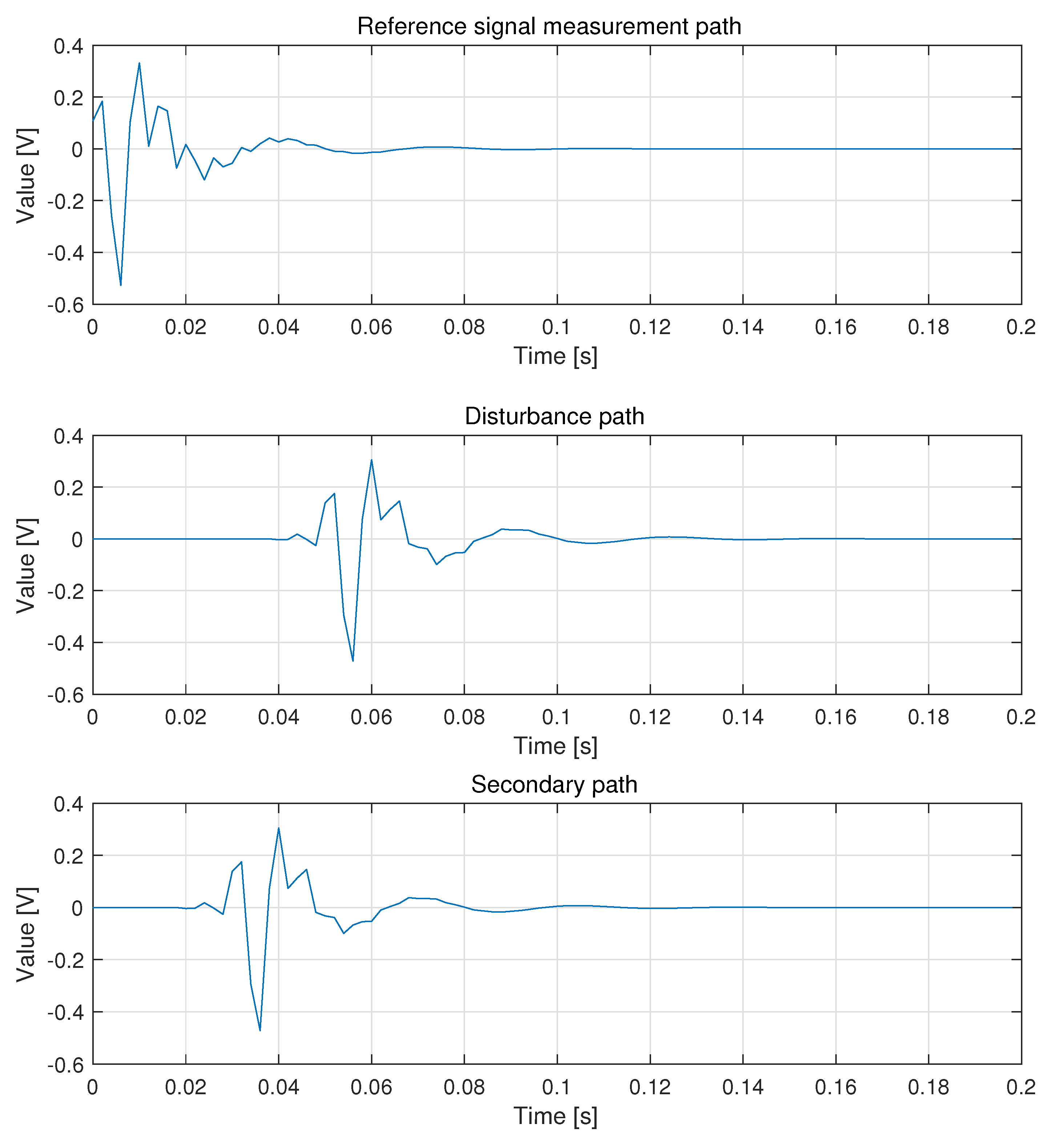
The first simulation case study concerns a problem of the active control of a noise to create a three-dimensional zone of quiet in a space without reverberations. Impulse responses of the secondary, disturbance, and reference signal measurement paths used in simulations are presented in
Figure 5. They are applied as coefficients of the corresponding FIR filters. In the presented simulation case study the total delay introduced by the error signal measurement path, controller, and secondary path (22 ms) is less than the delay introduced by the disturbance path (40 ms).
To present an influence of the error signal measurement path on the discrete-time signal
from secondary and disturbance paths the discrete-time model of an antialiasing analogue filter has been extracted to obtain models of the acoustical disturbance and secondary path control signal paths. This filter is a low-pass filter with a pass-band limited by 150 Hz and a stop-band starting from 200 Hz. Its sampled impulse response is shown in
Figure 6. It is used in simulations as a FIR filter with 100 coefficients. In
Figure 6 the corresponding impulse response of the equalization filter
is also presented.
In simulations presented in the first simulation case study, the coefficients of the FIR filter
are tuned online by the LMS algorithm with the parameter
. The noise to be attenuated is a low-correlated wide-sense stationary Gaussian random process with continuous spectrum and a power spectral density at the error microphone shown in
Figure 7 and
Figure 8 with red lines.
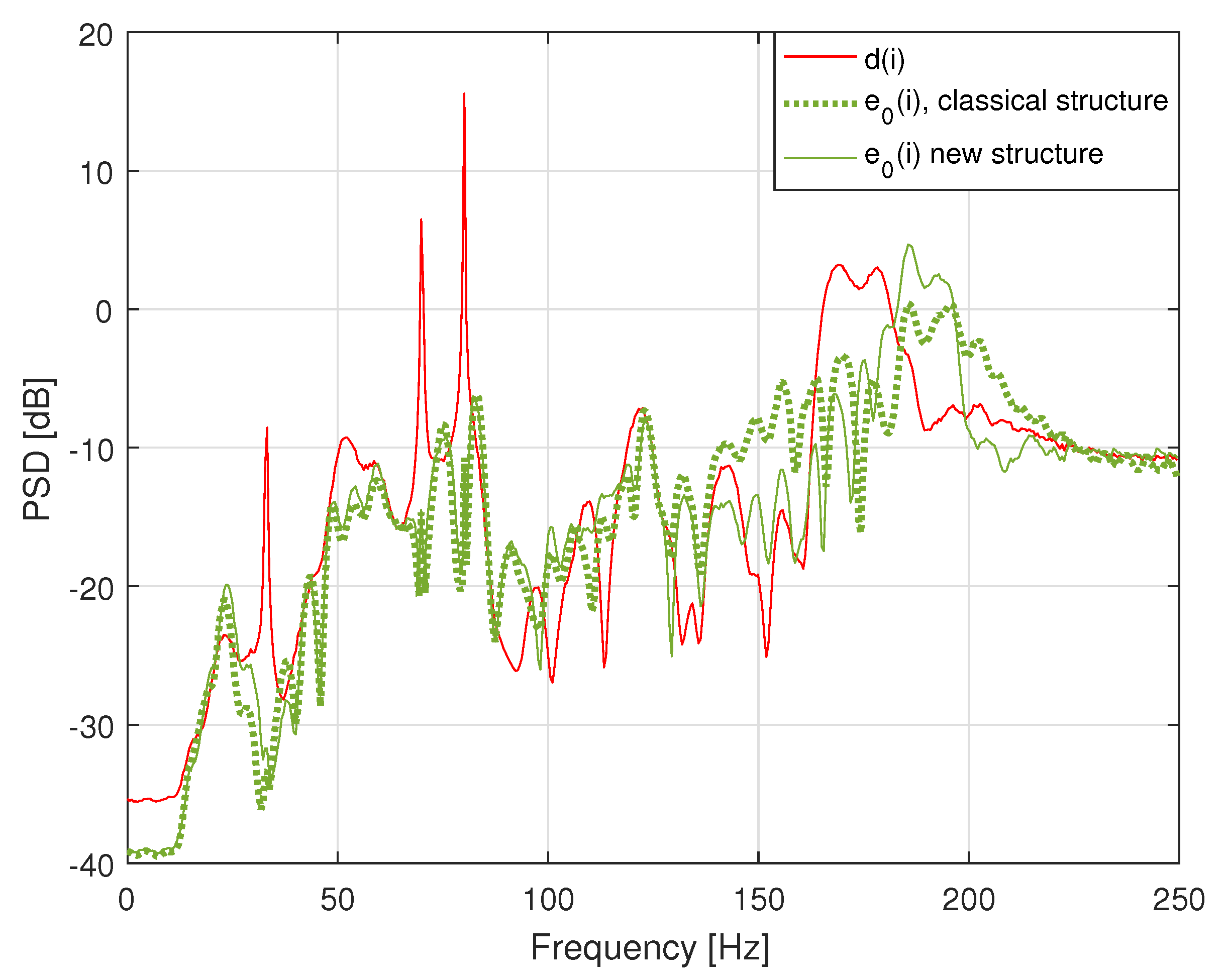
In
Figure 7a comparison of the power spectral densities of the discrete-time signals
and
in the classical FxLMS control system structure as well as a similar comparison of the power spectral densities of the discrete-time signals
,
, and
in the new FeFxLMS control system structure is presented. It exposes that the difference between the power spectral densities of the discrete-time signals
and
in the classical FxLMS control system structure is greater that the corresponding difference between the power spectral densities of the discrete-time signals
and
in the new FeFxLMS control system structure. It implies also that a calculation of noise reduction obtained based on the signal seen by the adaptation algorithms is more biased in the classical FxLMS control system structure than in the new structure; an estimate of the noise reduction obtained based on the discrete-time signal
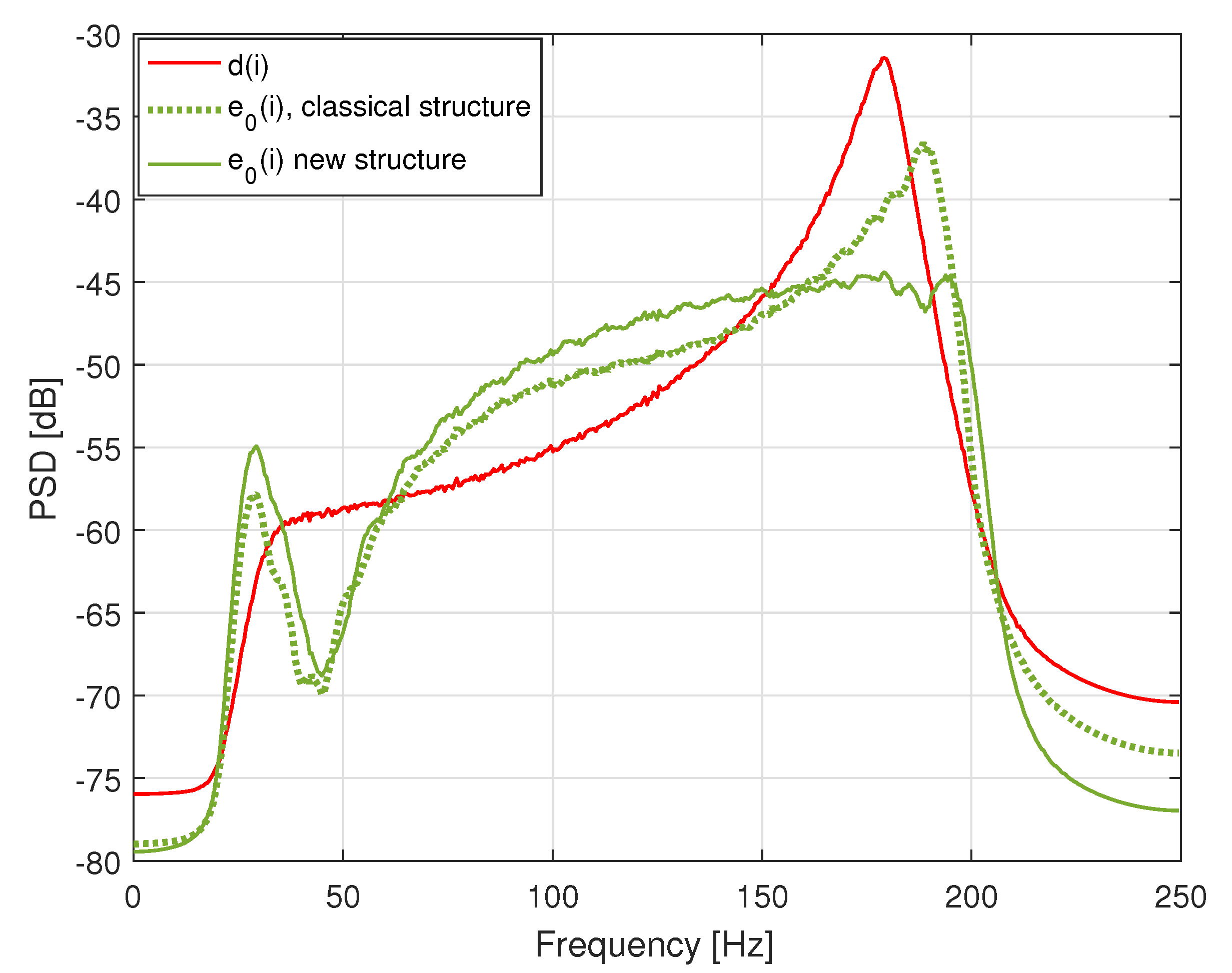
in the new FeFxLMS control system structure is closer to the noise reduction obtained at the error microphone and consequently, to what the active noise control system user perceives. The comparison of the power spectral densities of the discrete-time signals
) for the classical FxLMS and new FeFxLMS control system structure presented in
Figure 8 shows that the new FeFxLMS control system structure gave a significant improvement in the band 150 to 200 Hz due to the influence of the amplitude frequency response of the filter
.
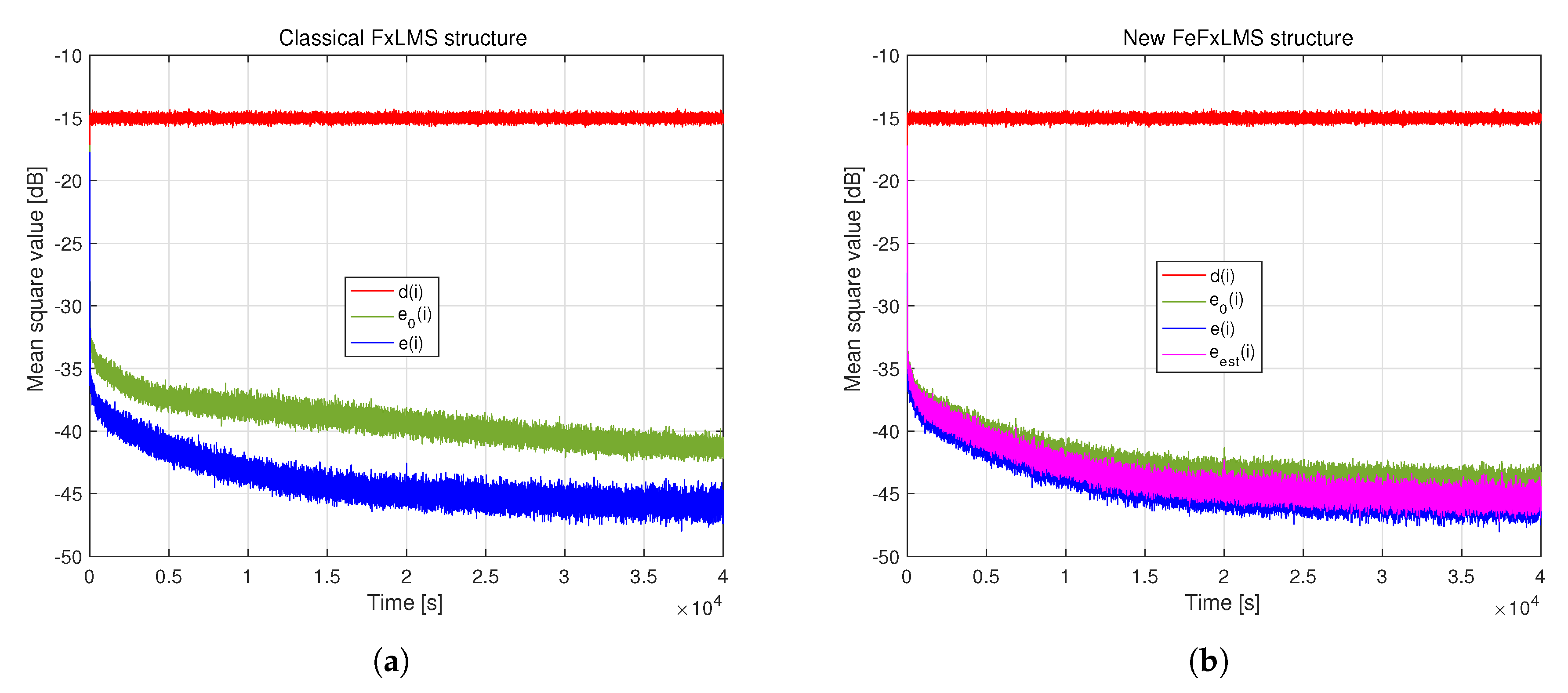
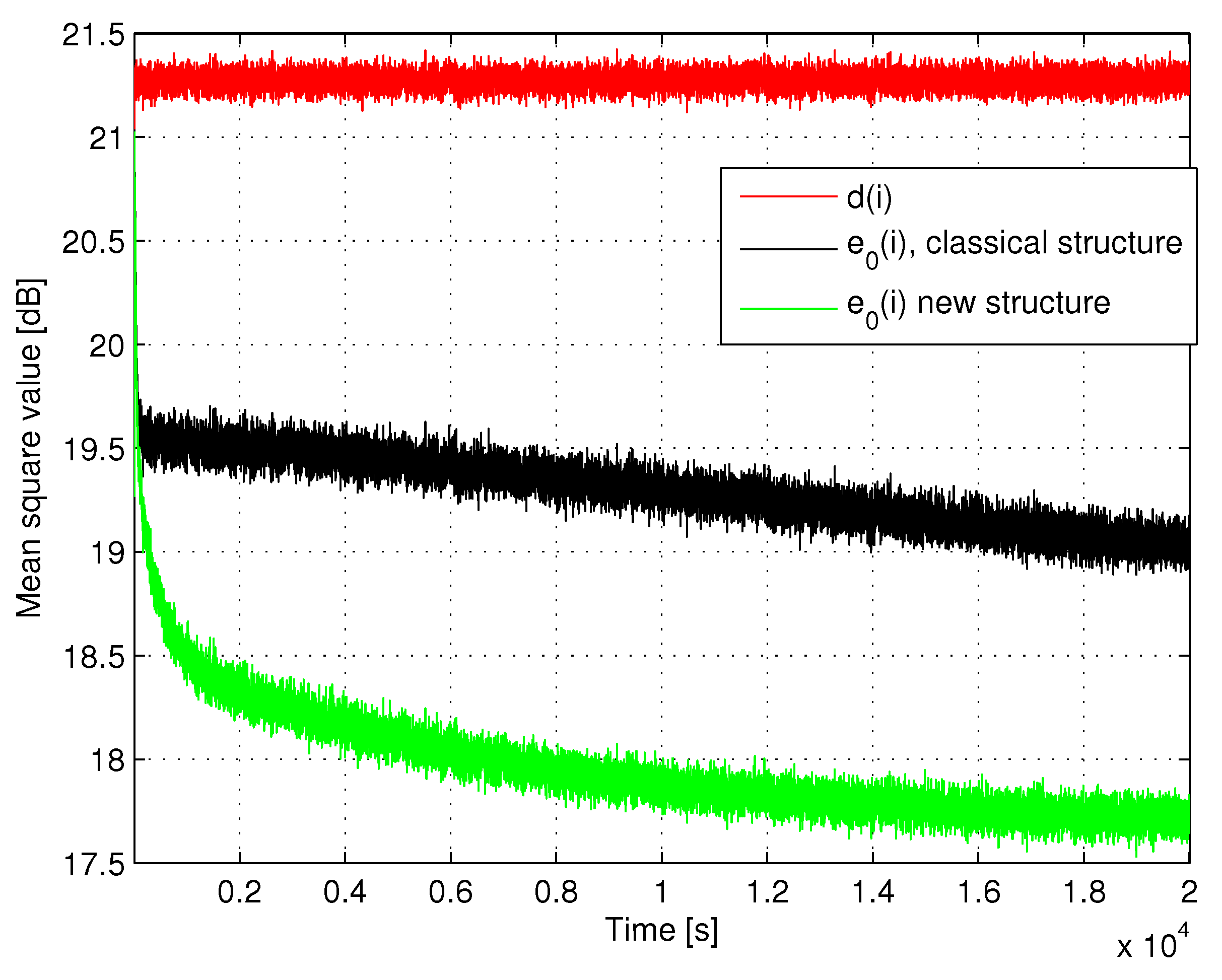
To compare the rate of convergence of the control algorithms in the two discussed structures, the time plots of the discrete-time signals
and
in the classical FxLMS active noise control system structure as well as the time plots of the discrete-time signals
,
, and
in the new FeFxLMS active noise control system structure are presented in
Figure 9. These are the averaged curves obtained for 100 realizations of noise to be attenuated with the autoregressive parameter equal to 0.999. For the considered noise to be attenuated, the discrete-time error signal
in the new FeFxLMS control system structure converged significantly faster than the signal
in the classical FxLMS control system structure. The plots also show that application of the new FeFxLMS active noise control system structure also gave an improvement in the full frequency band of system operation during initial adaptation. The values of the resulting noise reduction obtained in the classical FxLMS and new FeFxLMS control system structures are reported in
Table 1. It is worth emphasizing that with the new FeFxLMS control system structure, a greater noise reduction (approximately 10%) in error microphone (signal
) was observed. No perfect equality of noise reduction obtained seen by the error microphone and adaptive control algorithm was obtained due to a non-minimum phase feature of the error signal measurement path and the nonlinear feedback introduced by the adaptation algorithm [
11,
12].
4.2. Case Study 2
In the second simulation case study, dynamic properties of the disturbance and secondary paths are changed to represent a dynamic system in which the prediction of the noise to be attenuated is more difficult than in the previous simulation case study. The total time delay in the error signal measurement path, controller, and secondary path (14 ms) is longer than that the time delay in the disturbance path (6 ms). The corresponding impulse responses are presented in
Figure 10.
The above change implies that the low correlated noise used in the previous simulation case study could not be effectively attenuated. To obtain a visible noise reduction, the power spectral density of noise to be attenuated was also changed to a power spectral density defining a highly correlated wide-sense stationary Gaussian random noise. Its power spectral density is presented in
Figure 11 and
Figure 12 with red lines. This noise was attenuated in the classical FxLMS and new FeFxLMS control system structures. Parameters of the adaptive control algorithms were the same as for the previous simulation example except of the parameter
that was equal to 0.03.
In
Figure 11, the estimated power spectral densities of the discrete-time signals
and
in the classical FxLMS control system structure and corresponding estimates for the new FeFxLMS control system structure calculated using the discrete-time signals
,
, and
are presented. Power spectral densities of the discrete-time signals
estimated in the classical FxLMS and new FeFxLMS control system structures are compared in
Figure 12.
Noise reduction obtained with the classical FxLMS and new FeFxLMS control system structures is presented in
Table 2. Similarly, as in the previous simulation case study, the new FeFxLMS control system structure gave a greater (approximately 50%) noise reduction in the error microphone (signal
). It was also observed that similarly to the previous case study, the discrete-time signal
exposed a greater rate of convergence in the new FeFxLMS control system structure than in the classical FxLMS control system structure.
In the next step, the rate of convergence of the discrete-time signal is compared in the classical FxLMS and new FeFxLMS control system structures in simulations run to attenuate another noise. It is a wide-sense stationary random process with a mixed spectrum defined at the primary noise source, as a sum of two random sines and a discrete-time Gaussian white noise with a given variance. The random sine components frequencies were equal to 50 and 120 Hz, the amplitudes were equal to 1, and the phase shifts were random, equally distributed in the range . It should be noted that the Gaussian white noise after processing by dynamics of the reference signal measurement path and acoustical disturbance path was no longer white. Its power spectral density at the error microphone looked similar to the power spectral density of the noise used in the first simulation case study.
For a chosen variance of Gaussian white noise, 1000 realizations of 50,000 samples of the mixed spectrum random noise were generated and simulations were conducted. Parameter
was equal to 0.003. At each iteration, the corresponding mean square values of the discrete-time signal at the error microphone were estimated with the autoregressive parameter equal to 0.99, averaged over 1000 realizations, and expressed in dB. Next, differences between pairs of mean square value estimates in the classical FxLMS and new FeFxLMS control system structures are presented in
Figure 13 for the variance of Gaussian white noise equal to 0, 0.0001, 0.001, 0.01, 1, and 2.
The resulting difference was greater than zero for each Gaussian noise variance chosen. Consequently the noise reduction obtained in the new FeFxLMS control system structure was greater than in the classical FxLMS control system structure. Additionally, the time plots of the differences between expressed in dB estimates of the mean square value of the signals at the error microphone show that adaptation was faster in the new FeFxLMS than in the classical FxLMS control system structure during the whole simulation time and in general significantly faster during the initial adaptation period.
4.3. Case Study 3
The models of the reference signal measurement, disturbance, and secondary paths used in the previous two simulation case studies had similar amplitude frequency responses but different phase characteristics implied by the corresponding time delays in the signal processing paths. To verify the research results in the third simulation case study, the models of the reference signal measurement path, acoustical disturbance path, secondary path control signal part, and error signal measurement path identified in a laboratory room were applied. These models (impulse responses) in the form of the corresponding FIR filters were identified offline with the LS method using multisine excitations [
35]. For the purpose of simulations, they were cut to the first 100 elements.
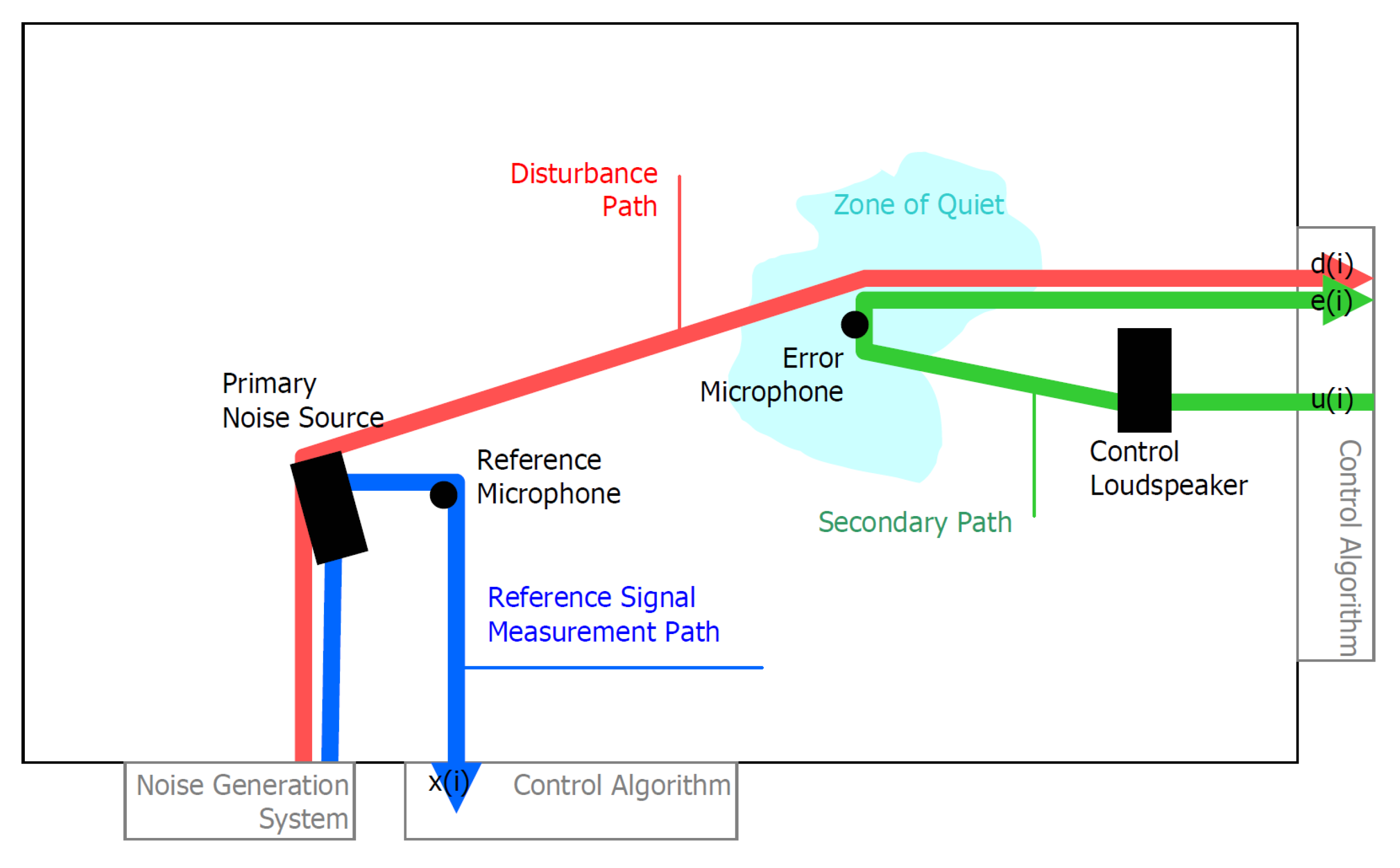
The active noise control system was used to create a local zone of quiet in the 70 m
reverberant room in the laboratory configuration shown in
Figure 2 and
Figure 14. The room was disturbed by noises generated from a primary noise source being a loudspeaker driven from a computer by a forming filter and amplifier. Near the primary noises source (0.4 m), a reference microphone was placed. The error microphone was placed 1.8 m from the primary noise source. The control loudspeaker was placed 2.3 m from the primary noise source, and 1 m from the error microphone. It was driven from the dSPACE DS1104 R&D Controller Board by a forming filter and amplifier The signal picked up by the error microphone was further amplified and processed by an antialiasing Butterworth 4th order filter with a cut off frequency equal to 120 Hz and fed to the control algorithm implemented in the controller board. The loudspeakers were Arton Audio Klasyk 70L Subwoofers with Alcone Acoustic AC10HE cones and as the reference and error microphones Beyerdynamic MM1 measurement microphones were employed.
The chosen laboratory configuration implies that the total time delay introduced by the error signal measurement path, controller, and secondary path (22 ms) was longer than the time delay introduced by the disturbance path model (14 ms). Dynamical properties of the laboratory plant are summarized in
Figure 15 in which amplitude frequency responses of the reference signal measurement path, acoustical disturbance path, secondary path control signal part, and error signal measurement path (represented by the atialiasing filter) are shown.
In the first step, the rate of convergence of the discrete-time signal
is compared in the discussed active noise control system structures in simulations run to attenuate a noise with a mixed spectrum. The mixed spectrum noise is a sum of three random sines and a discrete-time Gaussian white noise with a given variance. The sine components frequencies were equal to 33, 70, and 80 Hz, amplitudes were equal to 1 and phase shifts that were random, equally distributed in the range
. Such a random process is the input of the reference signal measurement and acoustical disturbance paths. For a given variance of the Gaussian white noise, 1000 realizations of this random process were generated, each realization of 50,000 samples and the classical FxLMS and new FeFxLMS control systems were simulated. Parameter
was equal to
. Each realization of the discrete-time signal
was processed in the same way as in the previous simulation case study. Differences between them are expressed in dB estimates of the mean square values of the discrete-time signals
in classical FxLMS and new FeFxLMS control system structures are presented in
Figure 16 for the variance of Gaussian white noise equal to 0, 0.0001, 0.001, 0.01, 1, and 2. These differences were greater than 0 and thus show that adaptation was faster in the new FeFxLMS control system structure than in the corresponding classical FxLMS control system structure in the simulation time window of 50,000 samples.
In the next step the length of simulation time window was changed to
samples and the noise reduction obtained after the convergence of adaptation algorithm was estimated. The obtained results of the mixed spectrum noise reduction are summarized in
Table 3.
It is important to note that the obtained noise attenuation in the new FeFxLMS control system structure and classical FxLMS control system structure are the same, provided that the error signal
is equal to 0 and consequently the error signal
at the error microphone is equal to 0 as well. As it was mentioned, it was the only case in which the classical FxLMS control system structure could give an optimal result. For most of the attenuated noises, the results obtained in the new FeFxLMS control system structure were better than what was obtained in the classical FxLMS control system structure, besides the cases with Gaussian white noise variances equaled to 1 and 2. Consequently, the power spectral densities estimated for the variance equal to 1 for a single realization of the discrete-time signals at the error microphone are presented in
Figure 17. The power spectral density of the mixed spectrum noise at the error microphone was plotted with a red line and the power spectral densities or the discrete-time error signals
in the classical FxLMS and new FeFxLMS control system structure are plotted with green lines. The noise components placed around the frequency 175 Hz were amplified by the new FeFxLMS control system structure more than by the classical FxLMS control system structure, which indicated that the parameter
of was too large. The parameter
for the variance of Gaussian white noise equal to 2 was too large as well.
According to the above conclusion, the simulations were repeated with the parameter
decreased 100 times to the value
for Gaussian white noise variances equal to 1 and 2. In
Figure 18, the estimated mean square values of the discrete-time signals
for the Gaussian white noise variance equal to 1 are compared; the presented curves averaged for 50 realizations of
. It follows that adaptation in the new FeFxLMS control system structure for the lower
value was significantly faster than in the classical FxLMS control system structure. It results in a greater noise reduction (3.40 dB) obtained with the new FeFxLMS algorithm after convergence of the adaptation process. The corresponding noise attenuation obtained with the classical FxLMS algorithm was reduced to 2.2 dB in comparison with the result from
Table 3. A similar improvement was observed in the results of the simulation experiments repeated for the Gaussian white noise variance equal to 2 and parameter
equal to
. The noise reduction values obtained were 1.79 dB for the classical FxLMS control system structure and 2.78 dB for the new FeFxLMS control system structure.
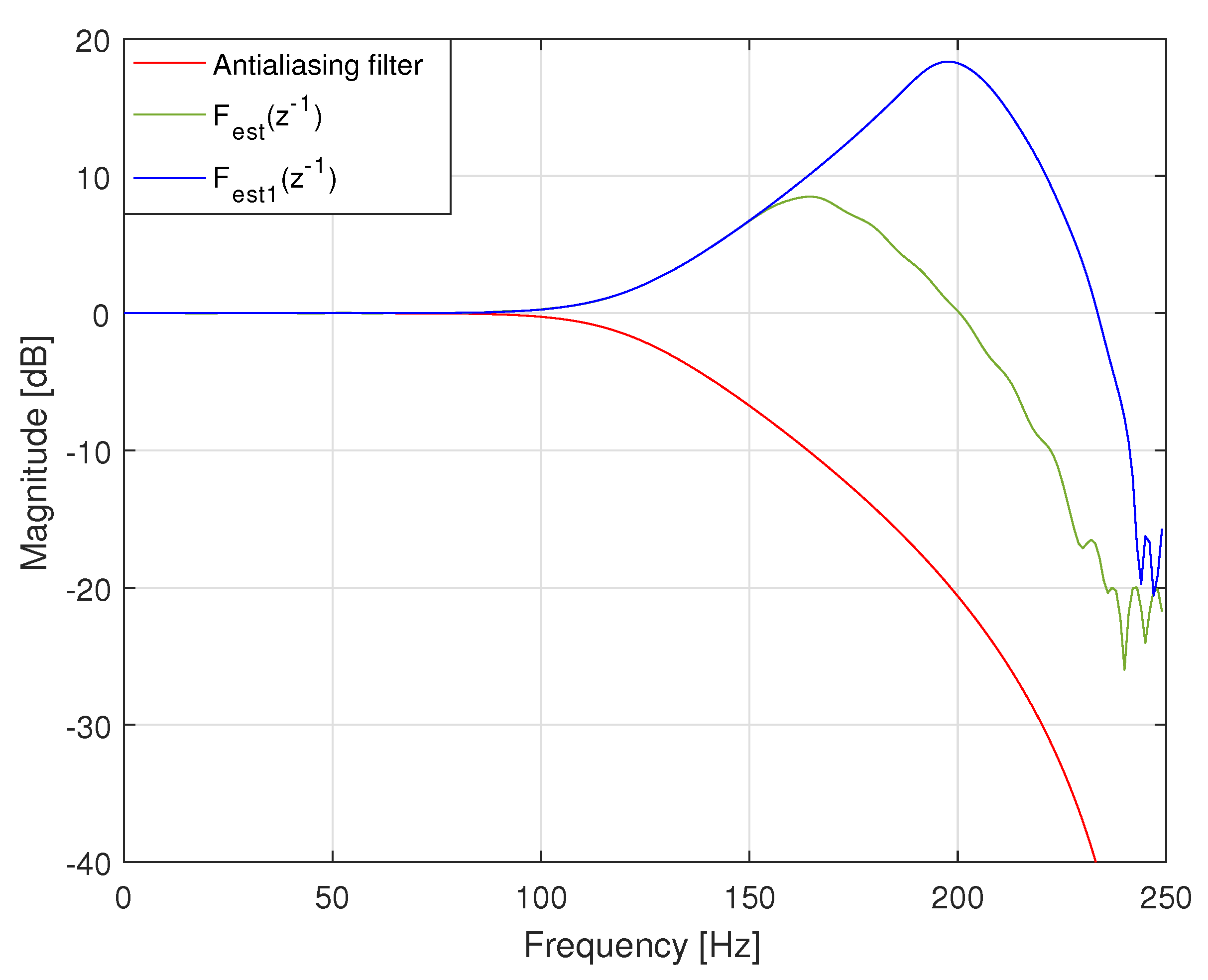
In the last simulation experiments, the influence of the equalization filter precision was addressed. A new filter
was applied to estimate values of signal at the error microphone. It was designed to estimate signal values at the error microphone precisely for a wider band of frequencies than it was possible with the filter
. Amplitude frequency responses of the two compared filters are shown in
Figure 19. The corresponding simulation results are summarized in
Figure 20 and
Figure 21.
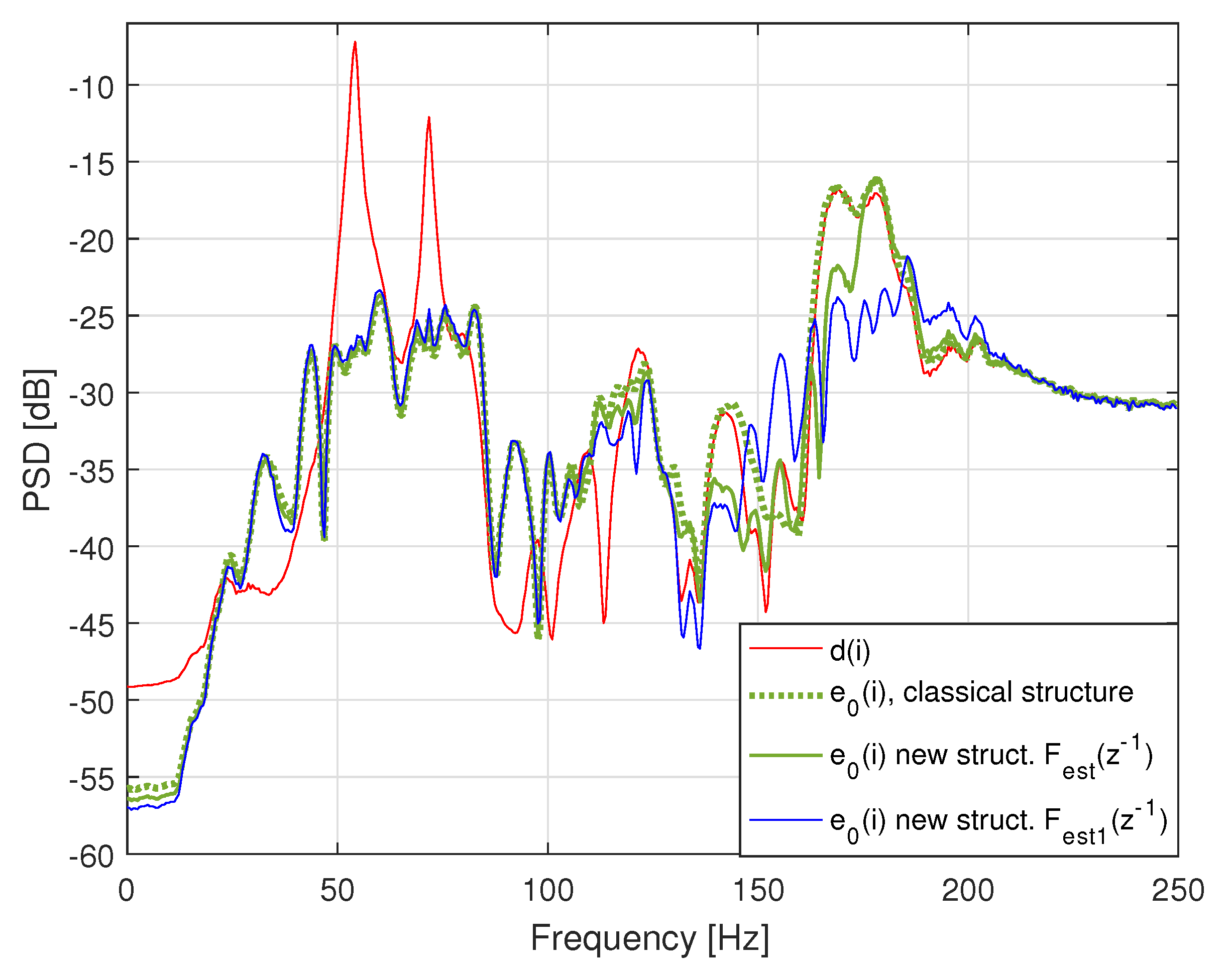
The noise to be attenuated is the continuous spectrum wide-sense stationary Gaussian random noise defined by the power spectral density plotted with a red line in
Figure 21. Simulation experiments were repeated for its 50 realizations of
samples. The parameter
was equal to
. In
Figure 20, the estimated (with autoregressive parameter equal to 0.999) mean square values of the discrete-time signals
are presented for the two discussed active noise control system structures. It follows from the presented time plots that the signal at the error microphone converged faster in the new FeFxLMS control system structures than in the classical FxLMS control system structure and the new structure with the filter
gave the highest noise reduction. The corresponding averaged noise reduction was the following: 2.77 dB in the classical FxLMS structure, 3.82 dB in the new FeFxLMS structure with the filter
, and 5.25 dB in the new FeFxLMS structure with the filter
.
In
Figure 21, the estimated power spectral densities of the signals at the error microphone in the new FeFxLMS control system structure with old
and newly designed filter
and the classical FxLMS control system structure are presented. They were obtained for a single realization of the noise to be attenuated after convergence of the adaptation process. It is worth noting that the frequency domain properties of the filter applied to estimate values of the signal at the error microphone influence on a comfort of the active noise control system users. The new FeFxLMS control system structure with the filter
, that estimates signal values at the error microphone precisely for a wider band of frequencies than it was possible with the filter
, gives the greatest noise reduction but also amplifies noise at frequencies around 200 Hz more than the remaining active noise control systems considered.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}