Verification of Optimized Real-time Hybrid Control System for Prediction of Nonlinear Materials Behavior with 3-DOF Dynamic Test

Abstract
1. Introduction
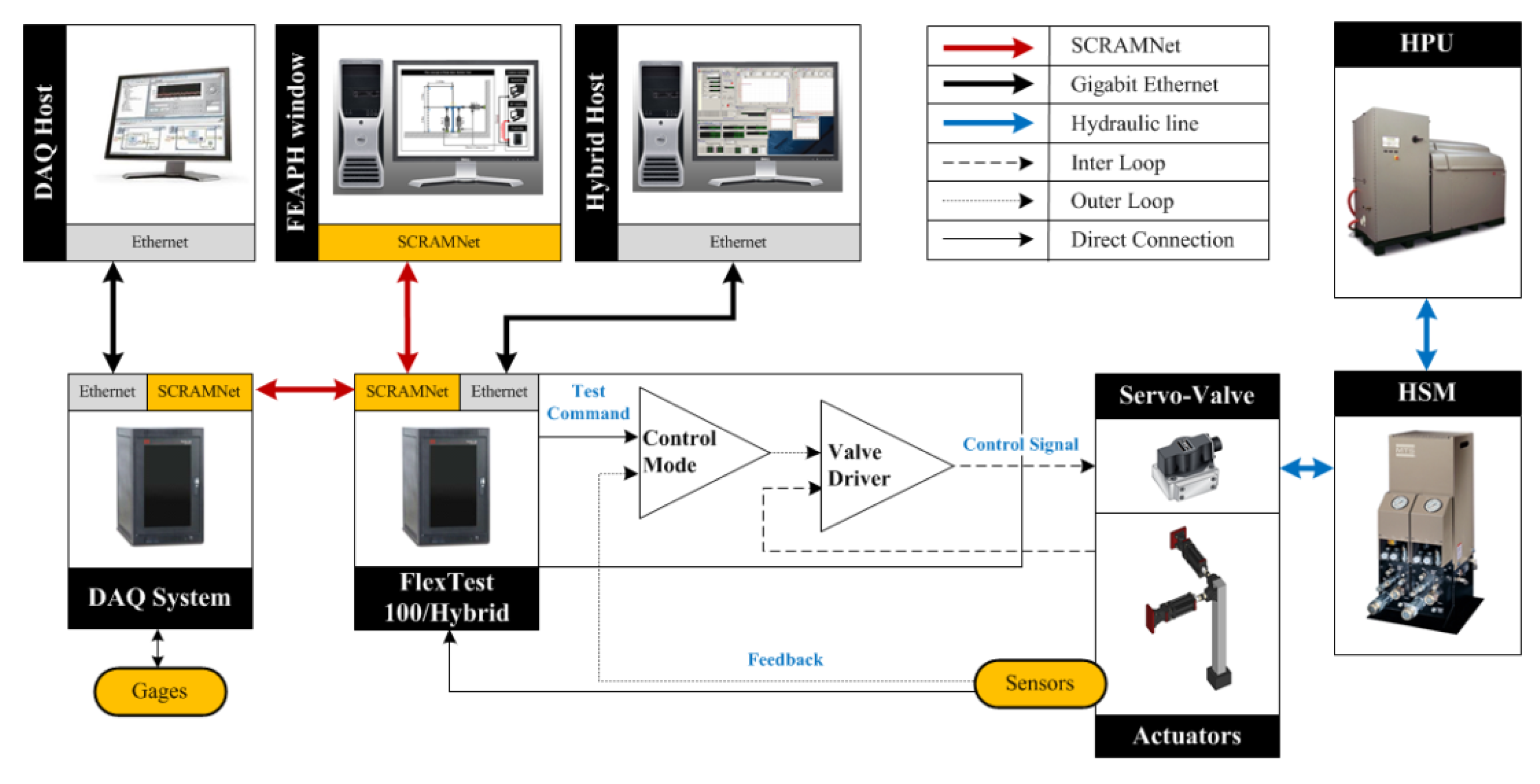
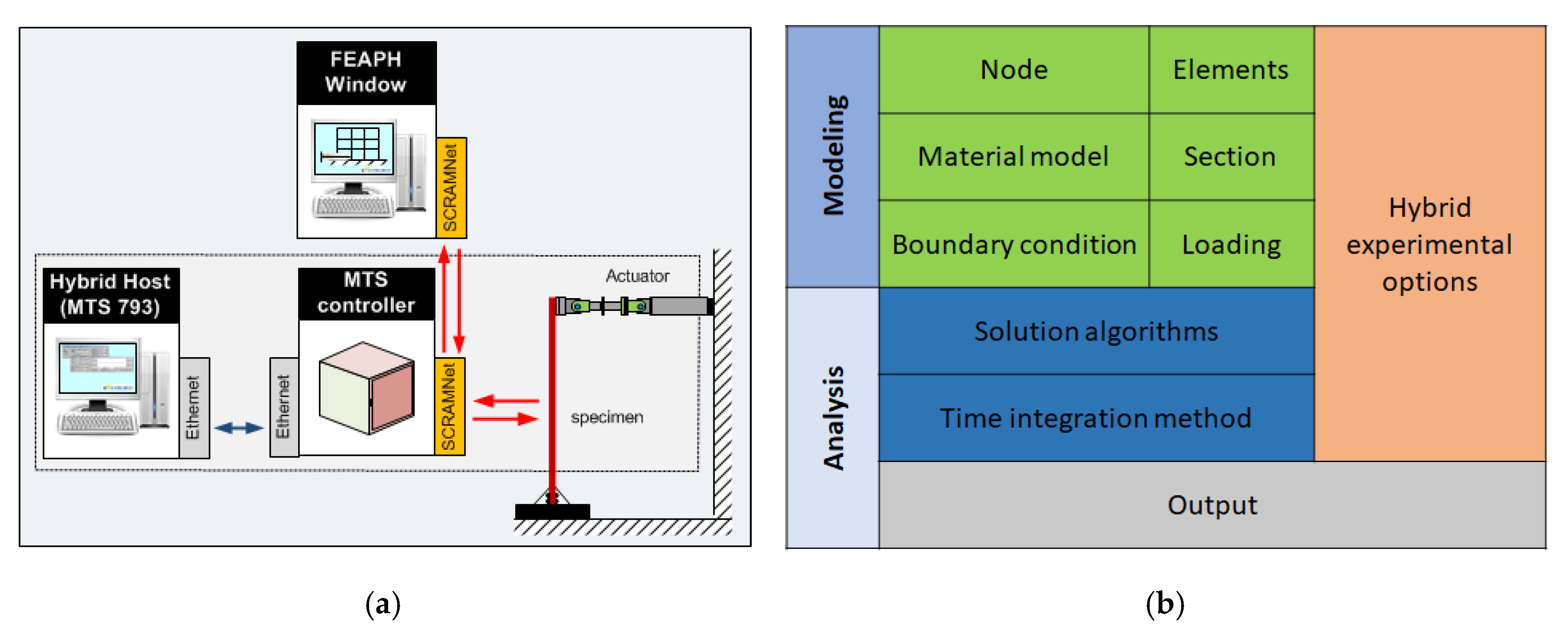
2. Configuration of the Hybrid Test Hardware
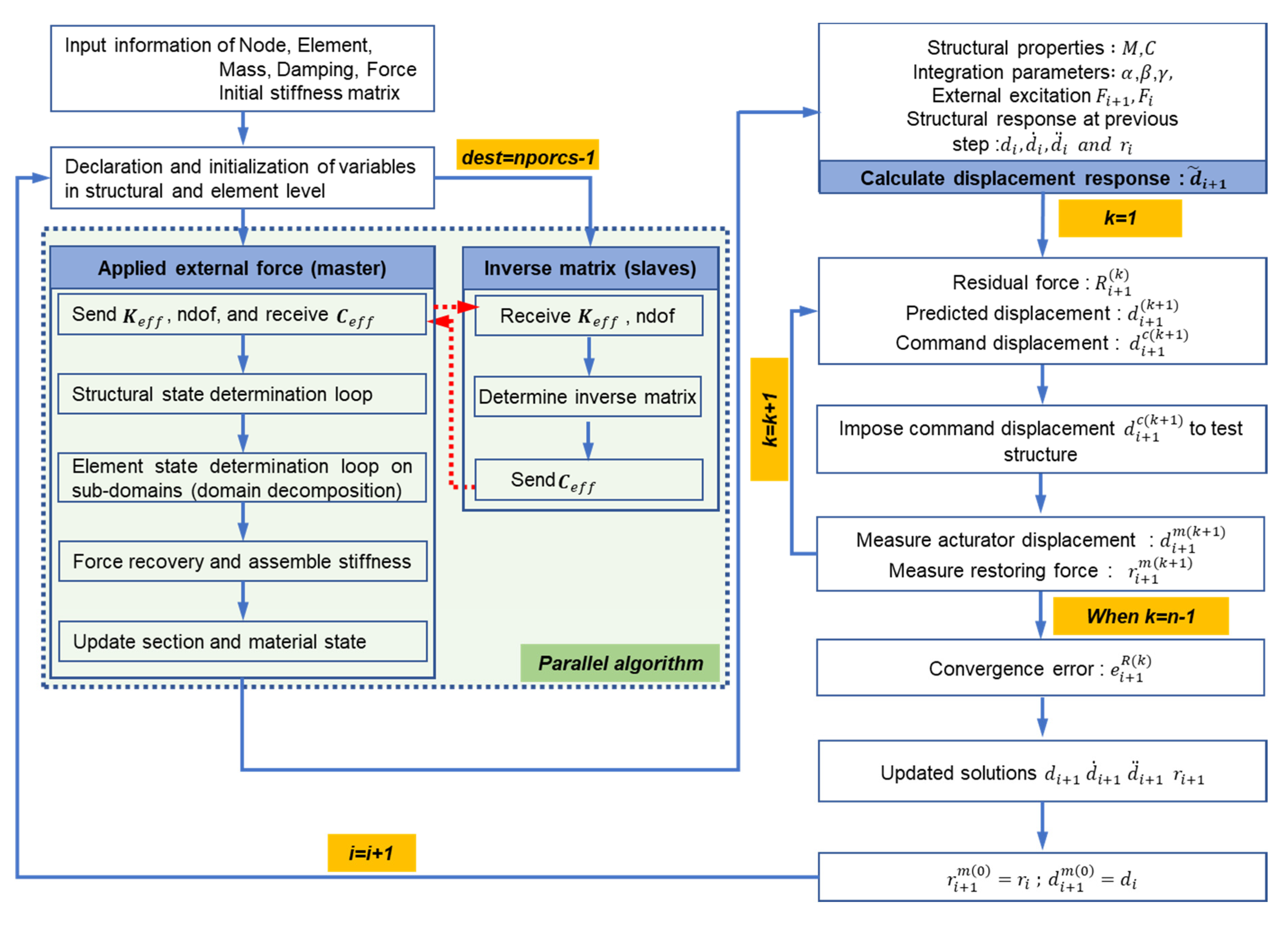
3. Finite Element Analysis Program for Hybrid Testing and Procedures
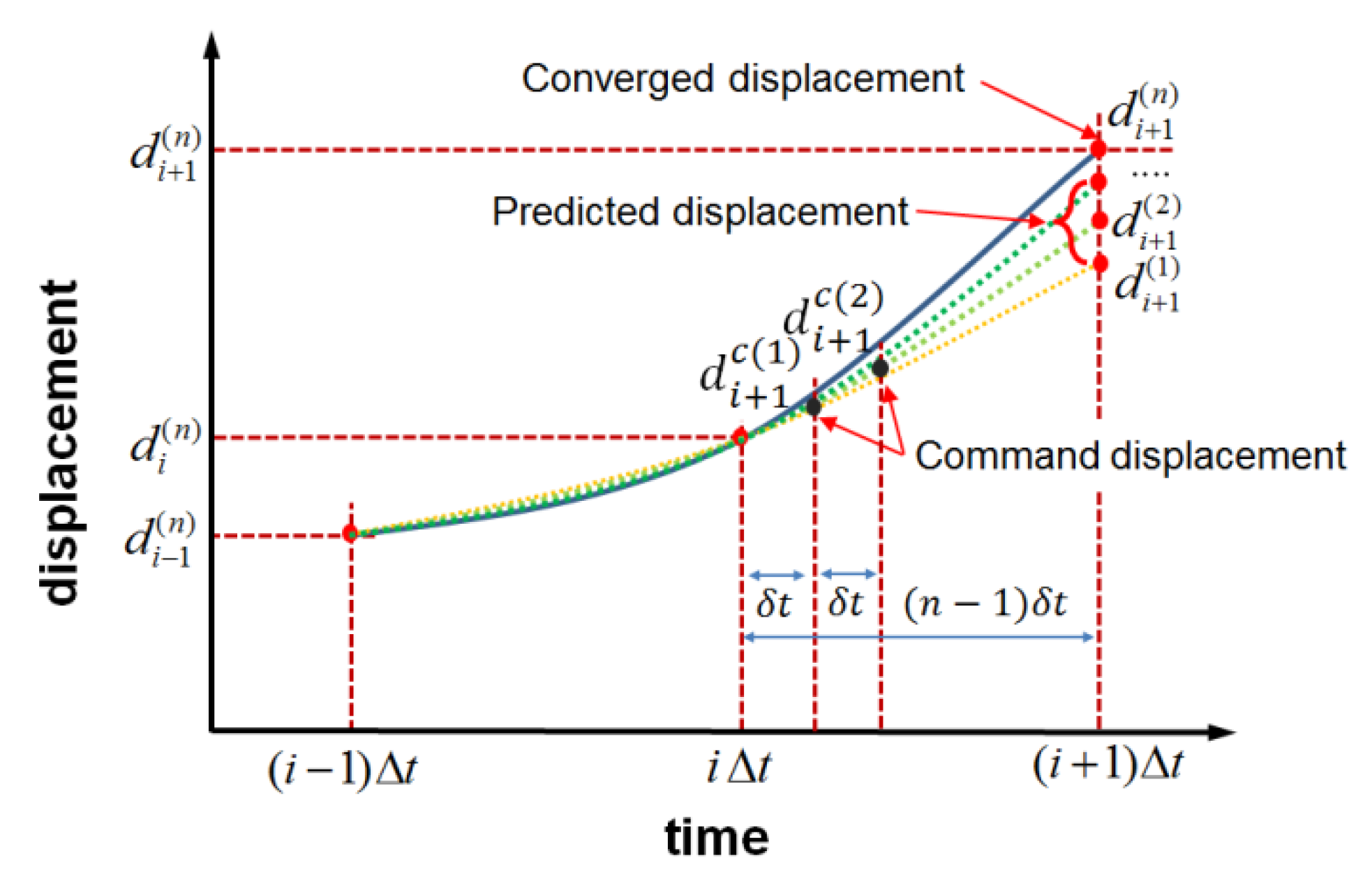
4. Time Integration Method
5. Verification of Real-time Hybrid Control System
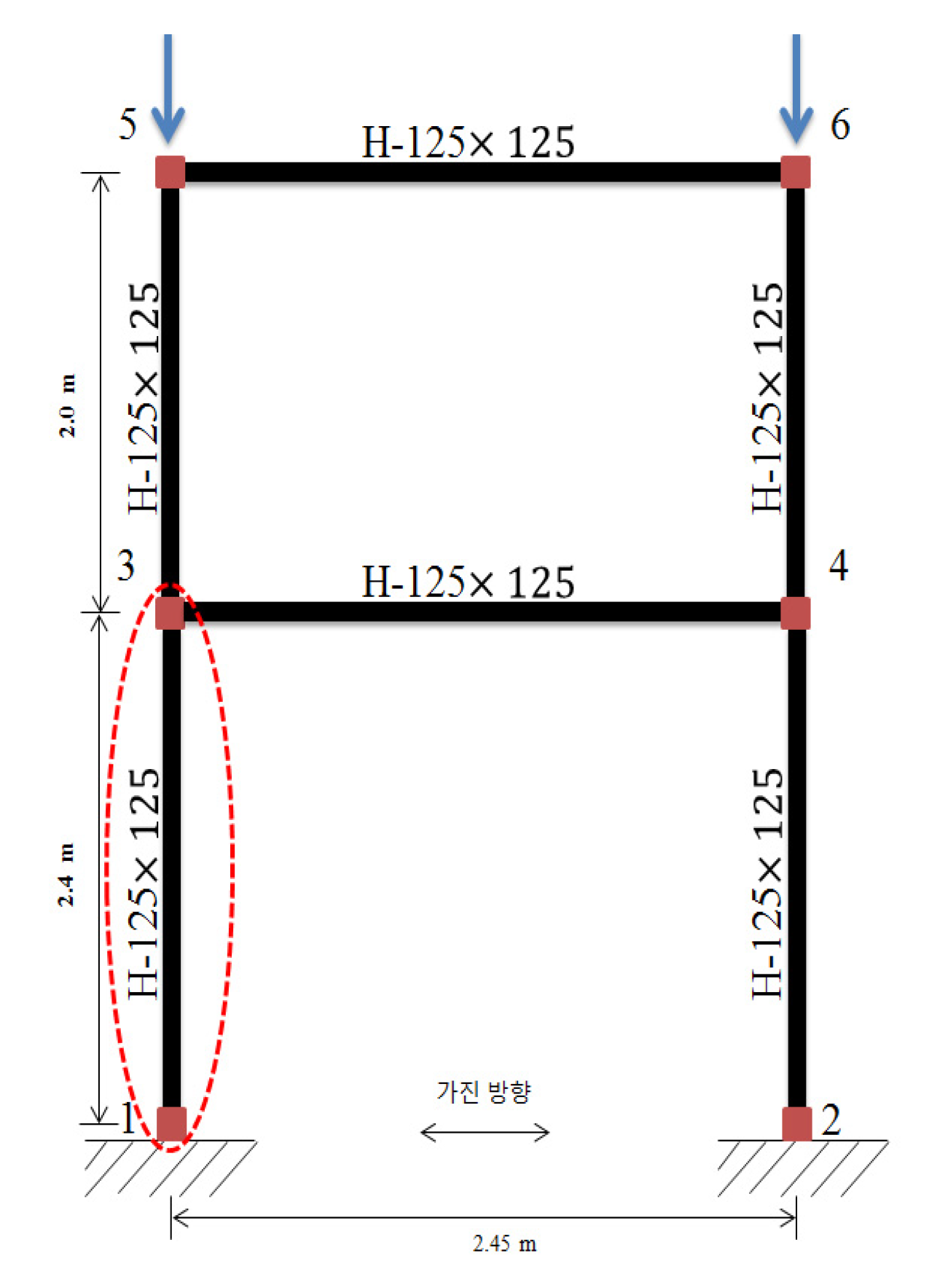
5.1. Three-DOF Structural Dynamic Test with Steel Structure
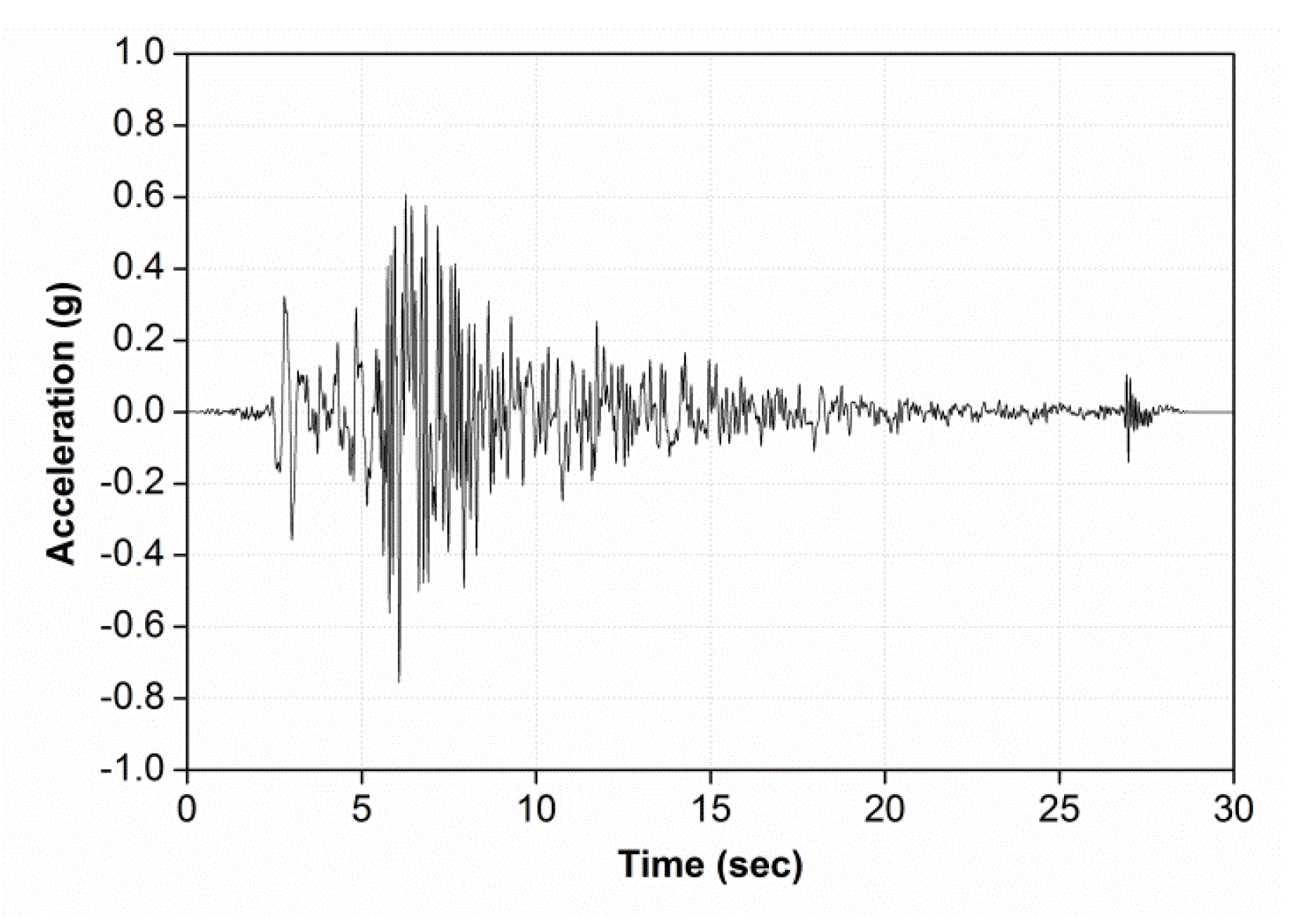
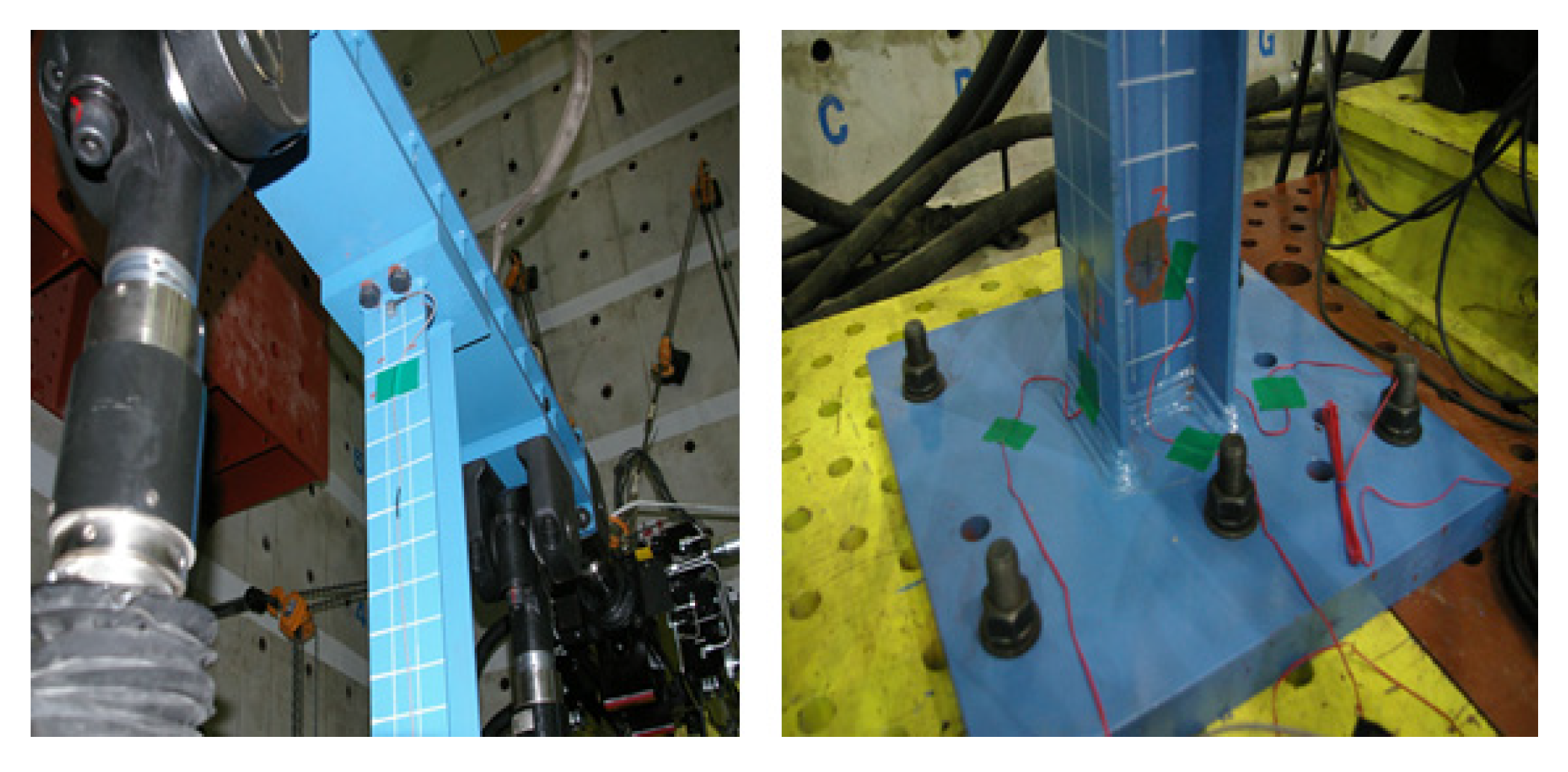
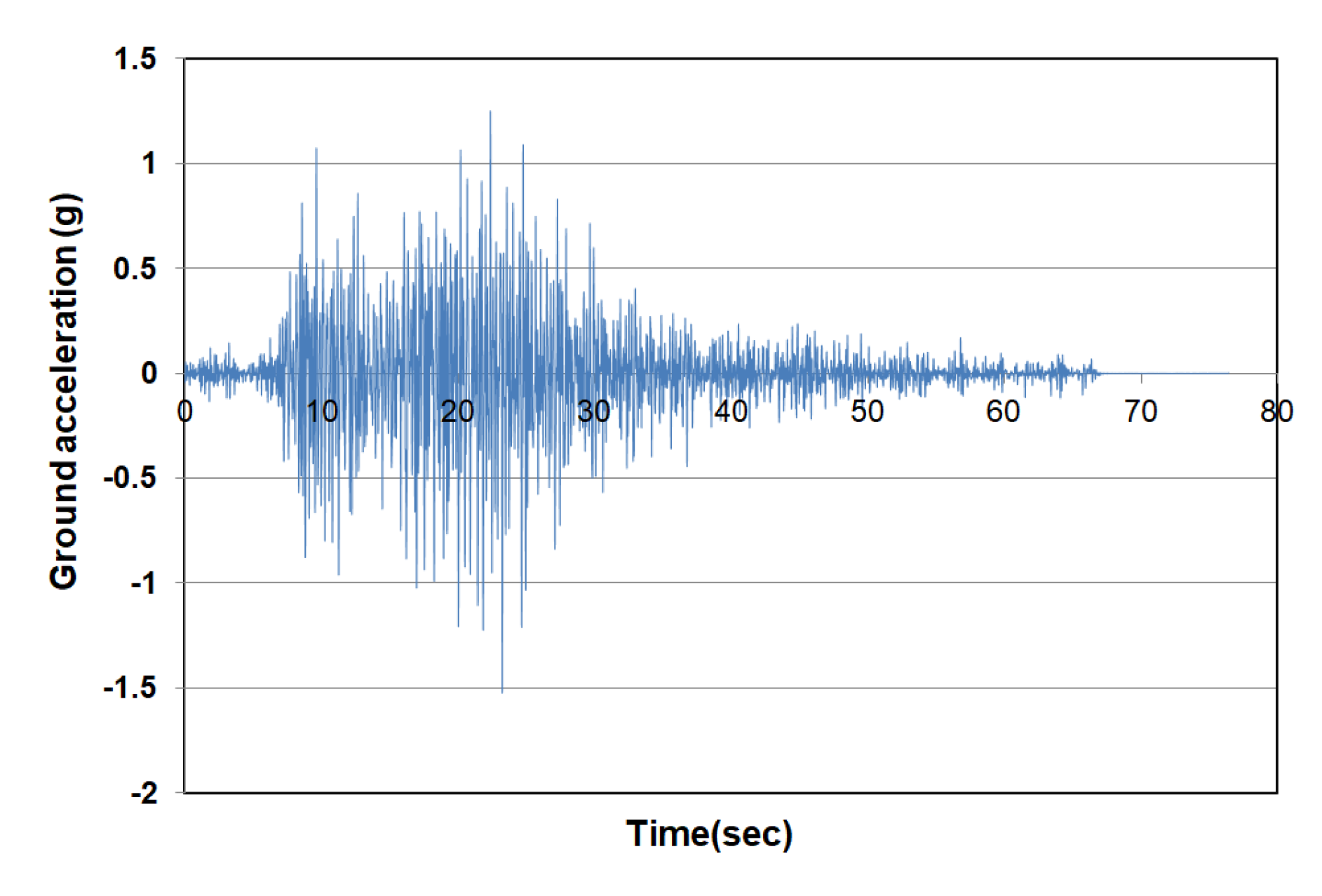
5.1.1. Test Set-Up and Input Properties
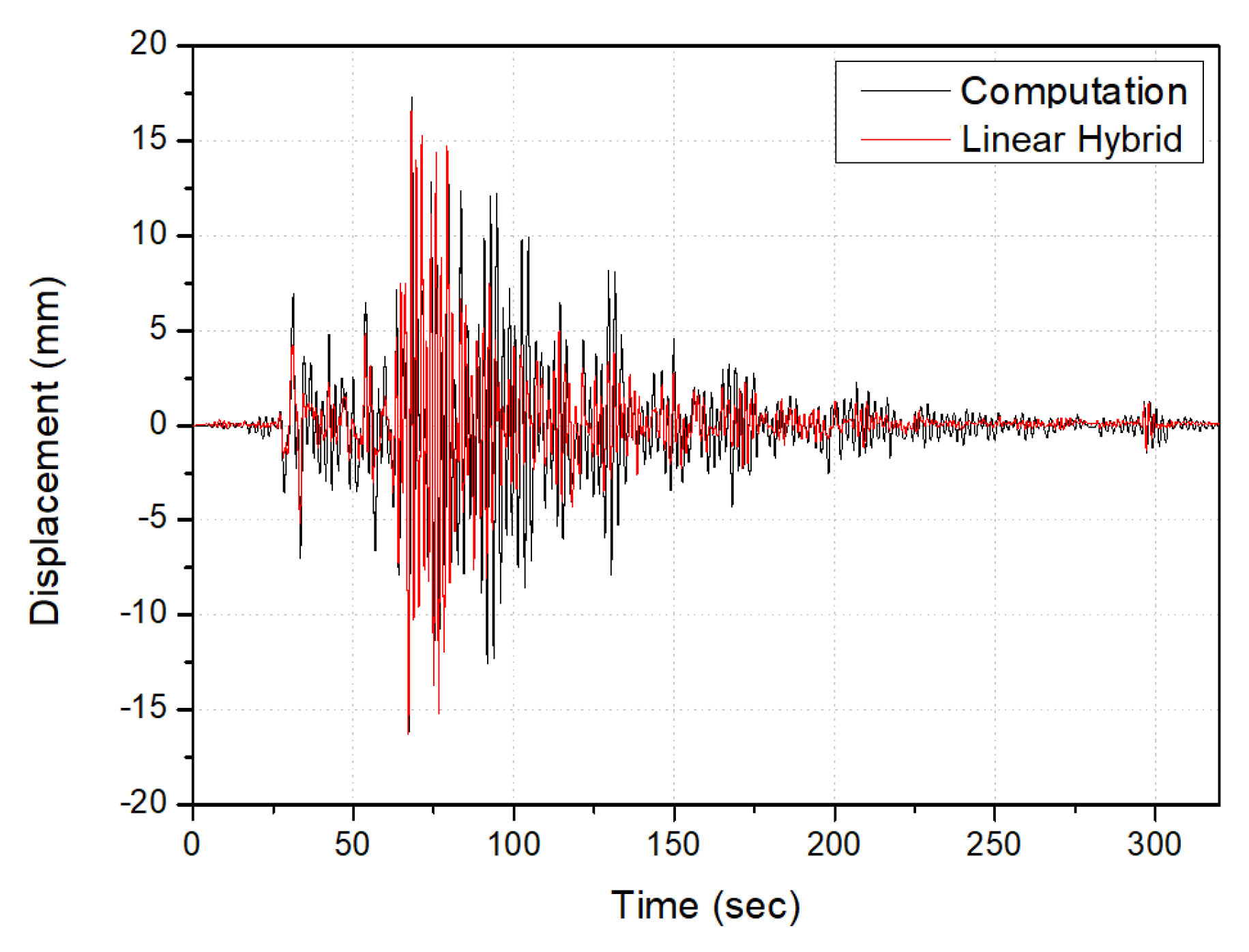
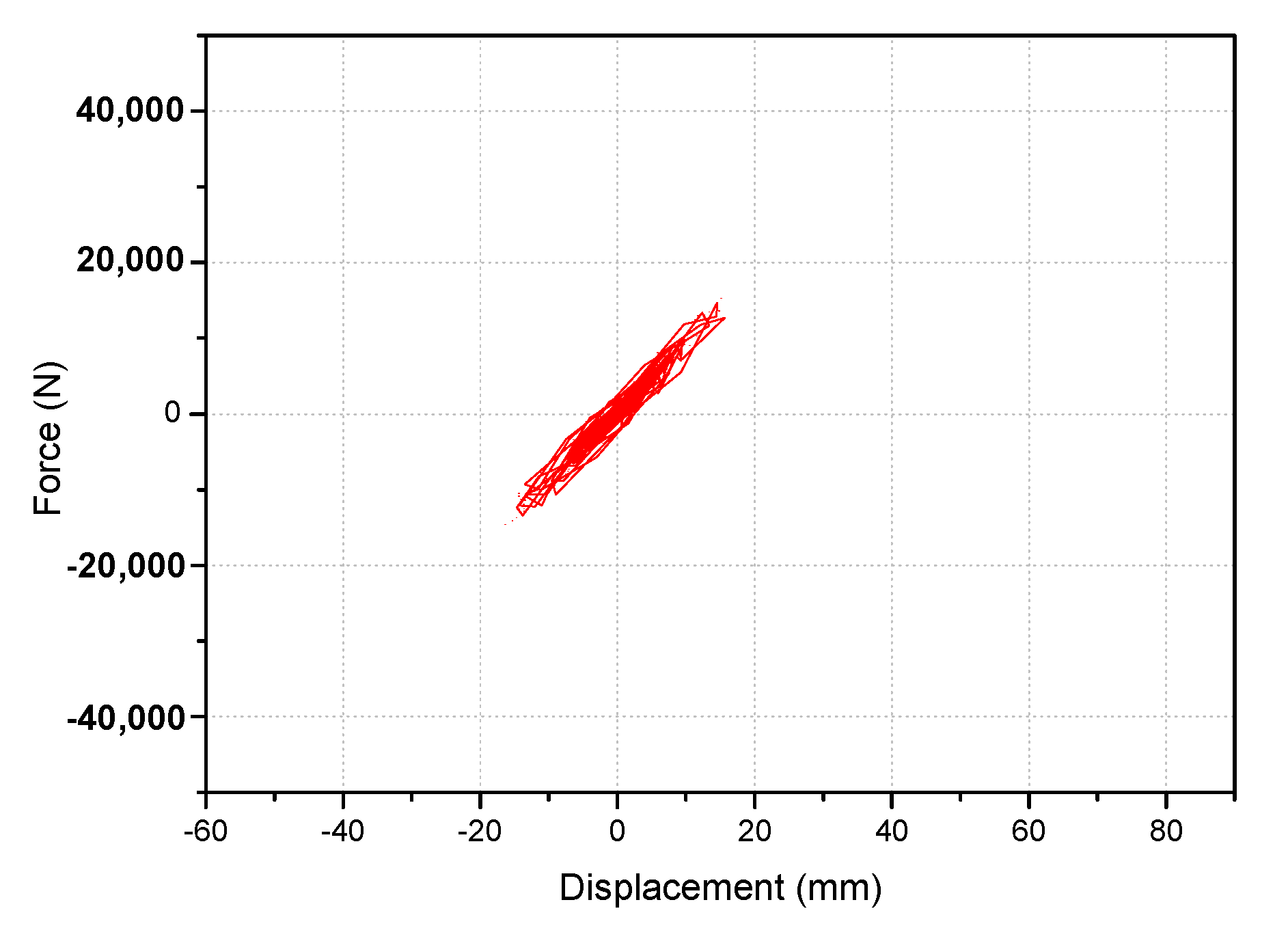
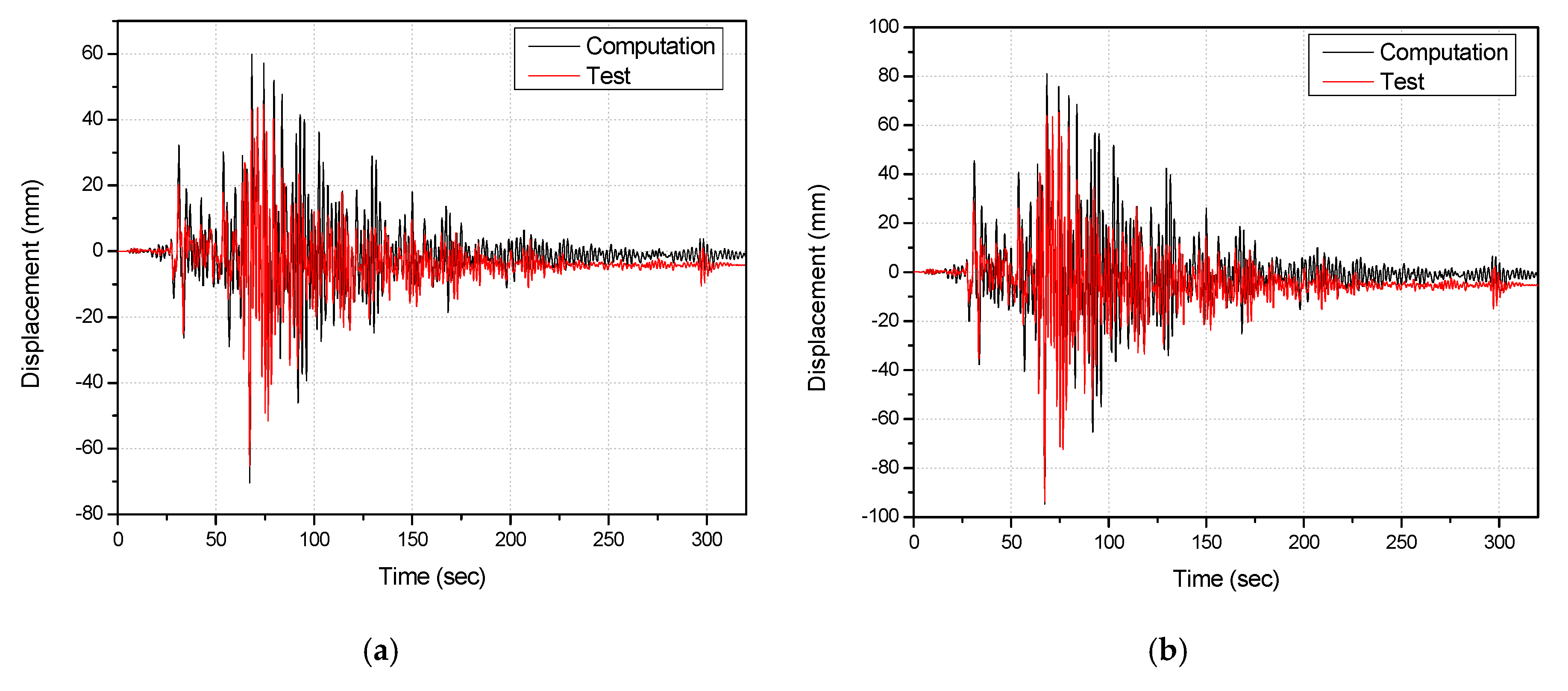
5.1.2. Linear Dynamic Test with Real-Time Hybrid Control System
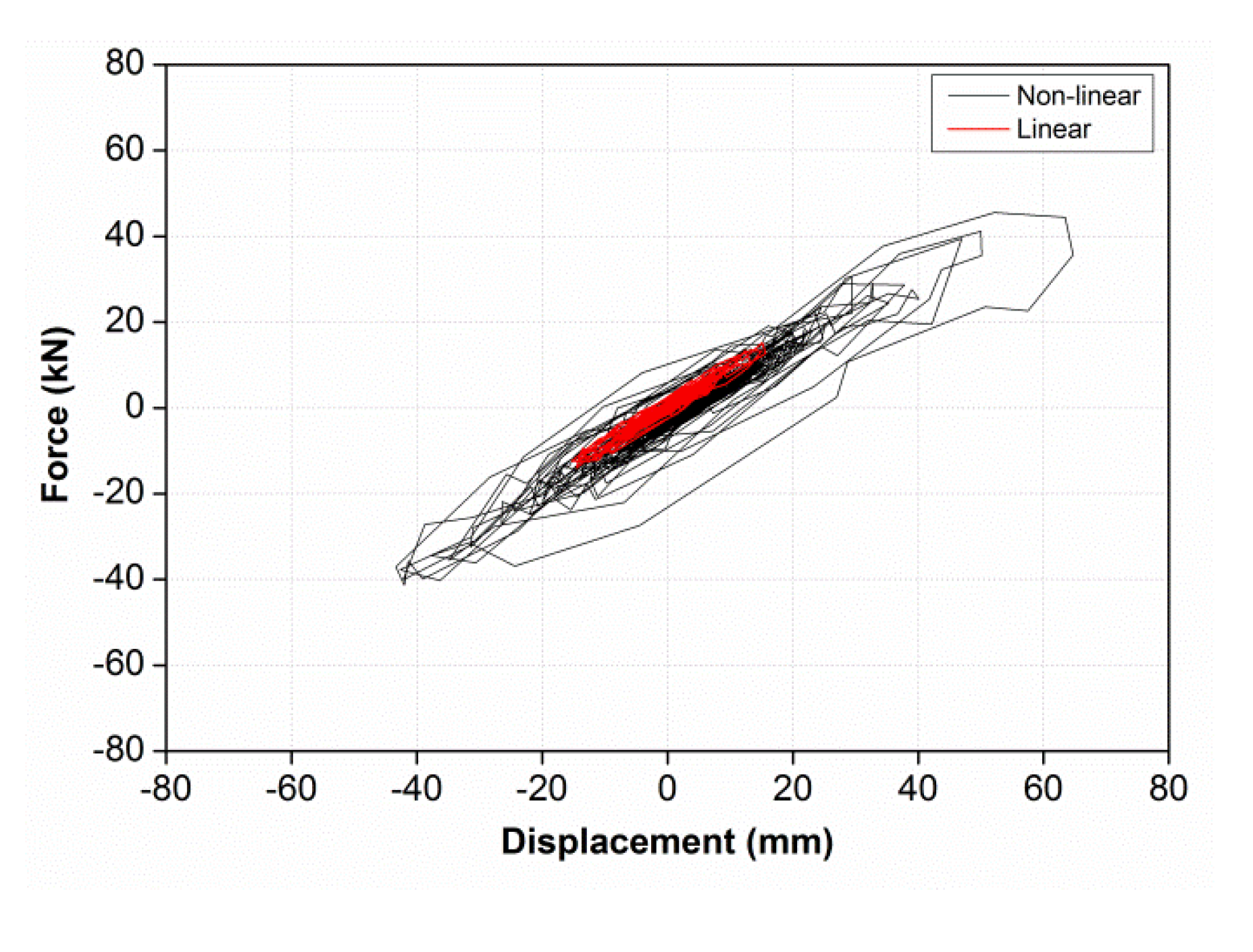
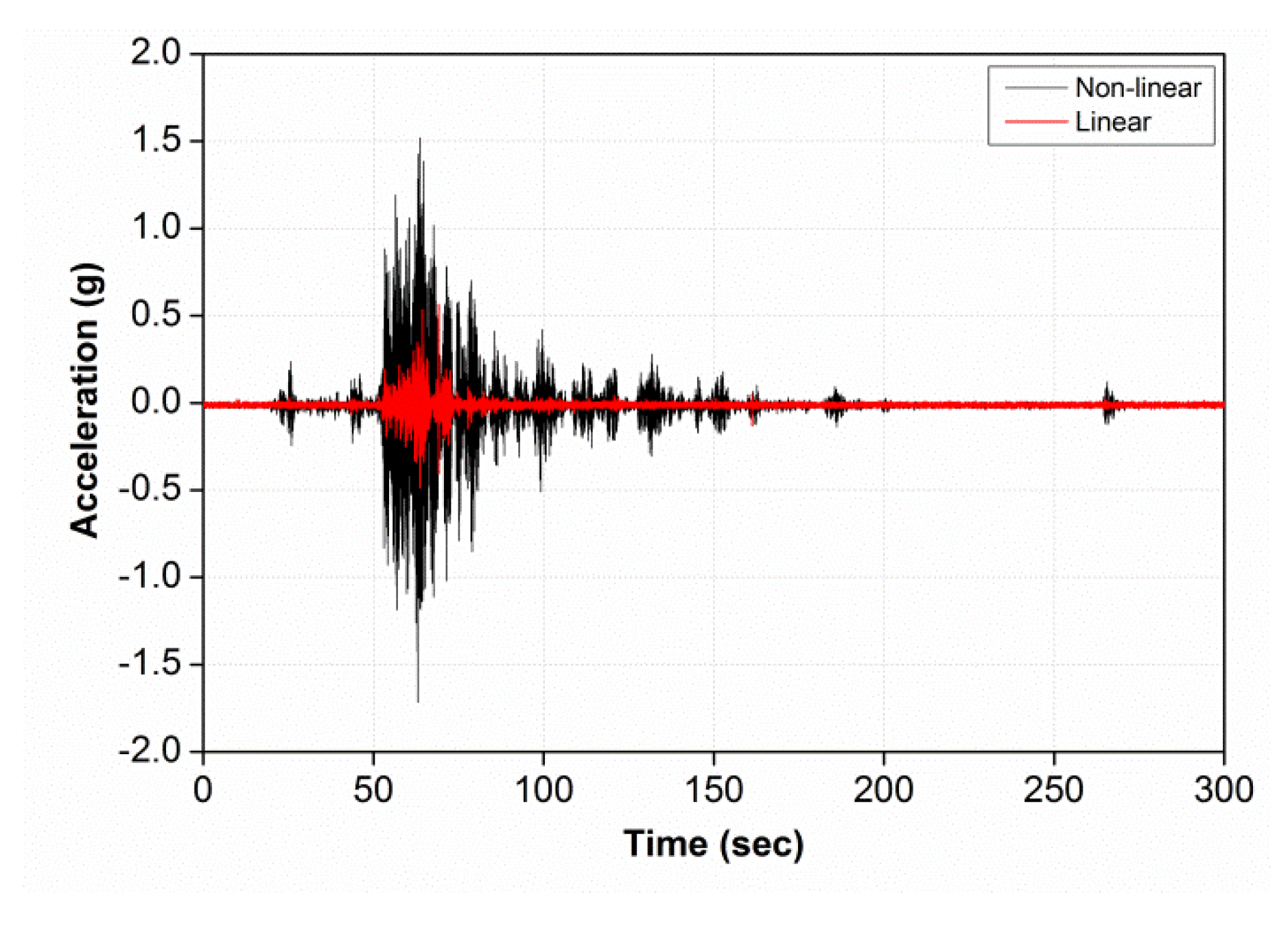
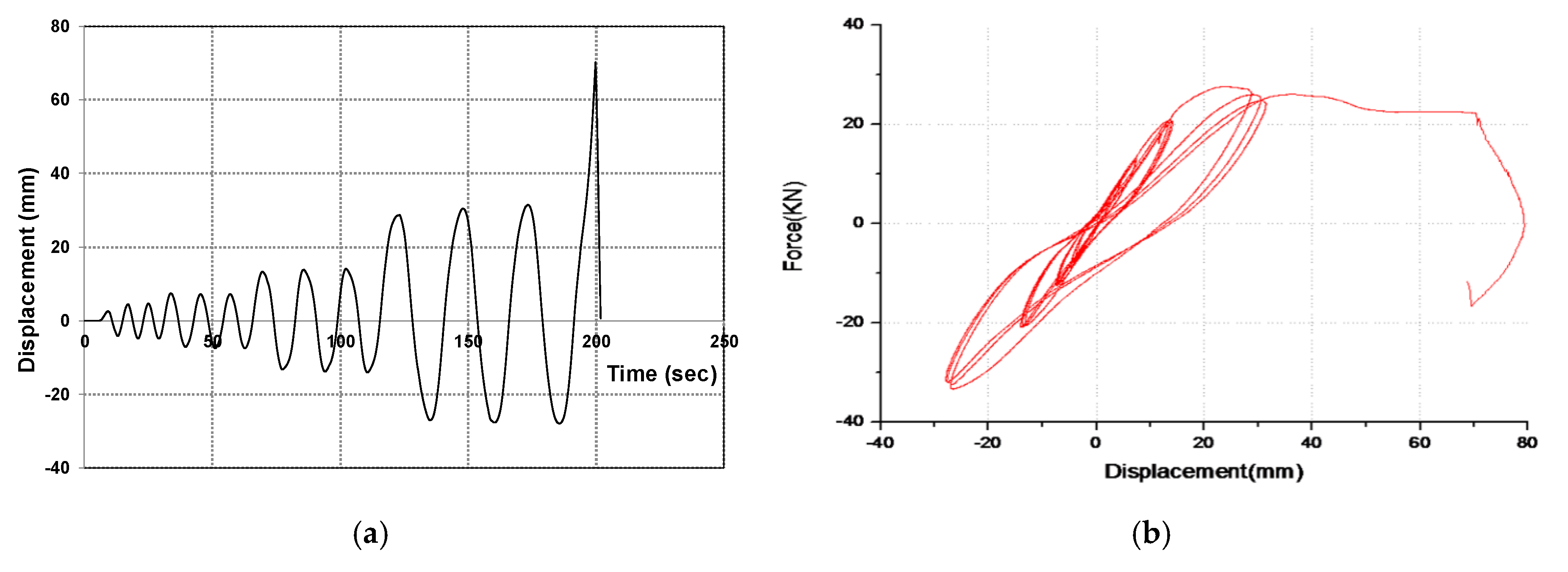
5.1.3. Non-Linear Dynamic Test with Real-Time Hybrid Control System
5.2. Three-DOF Structural Dynamic Test with Concrete Structure
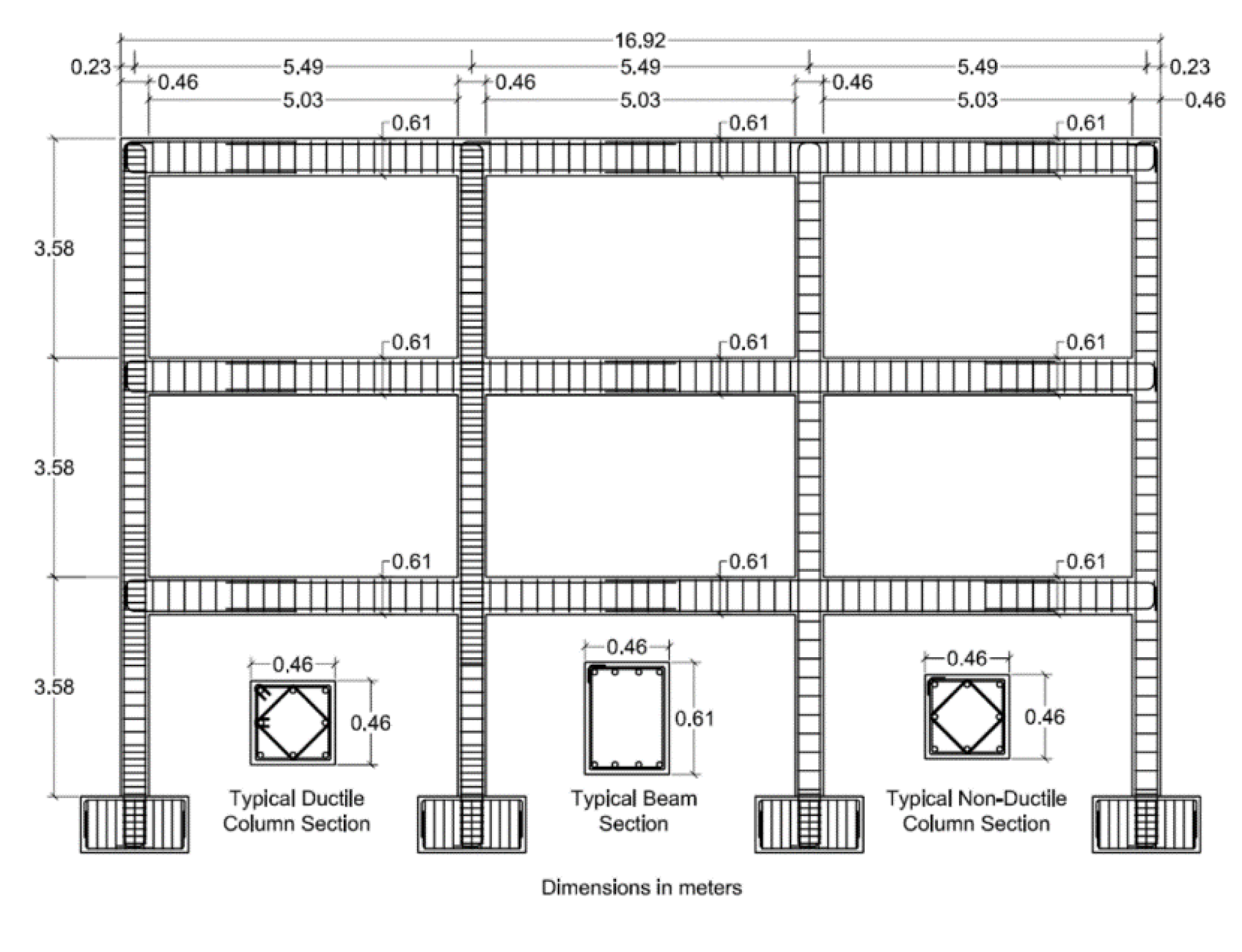
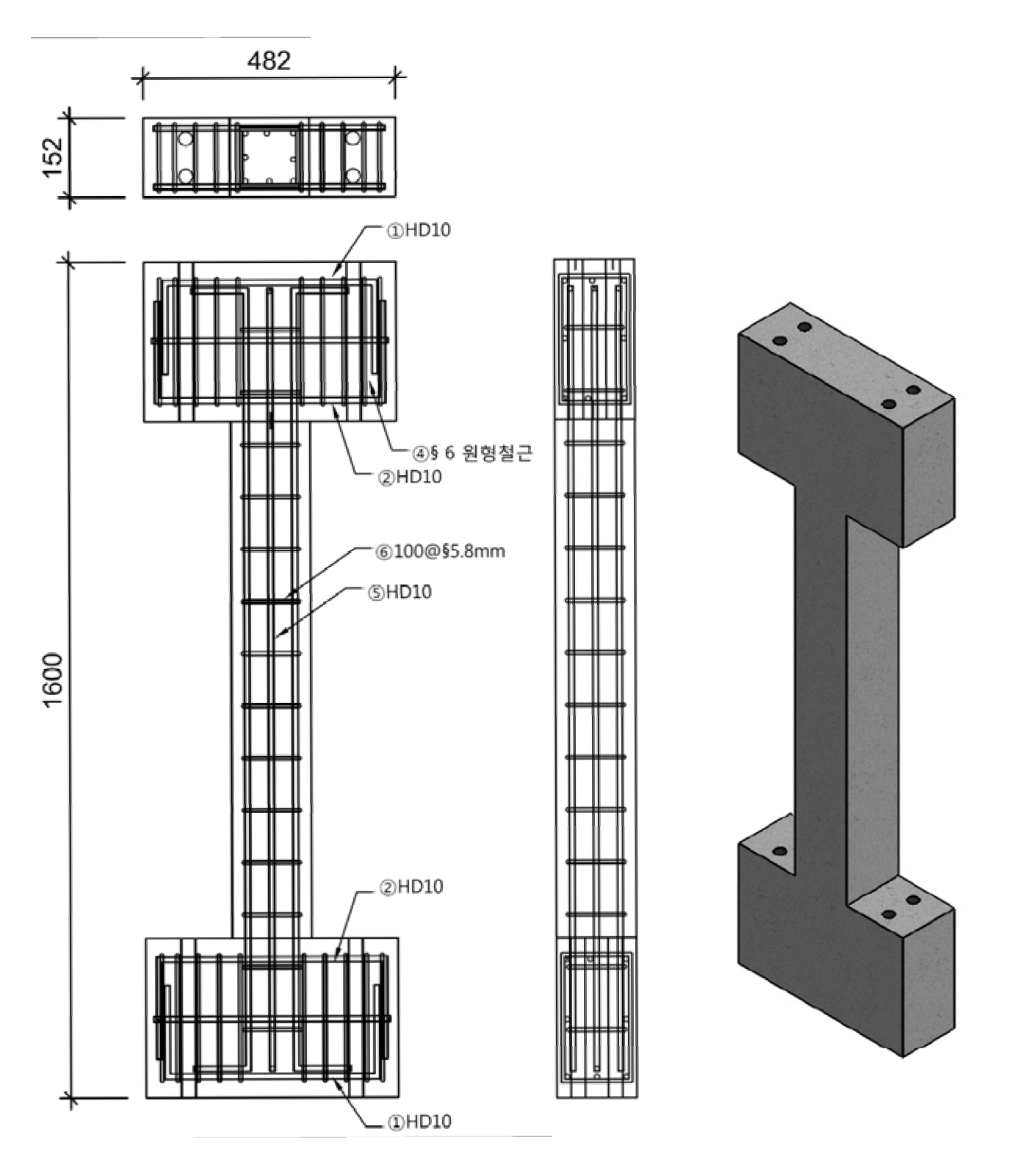
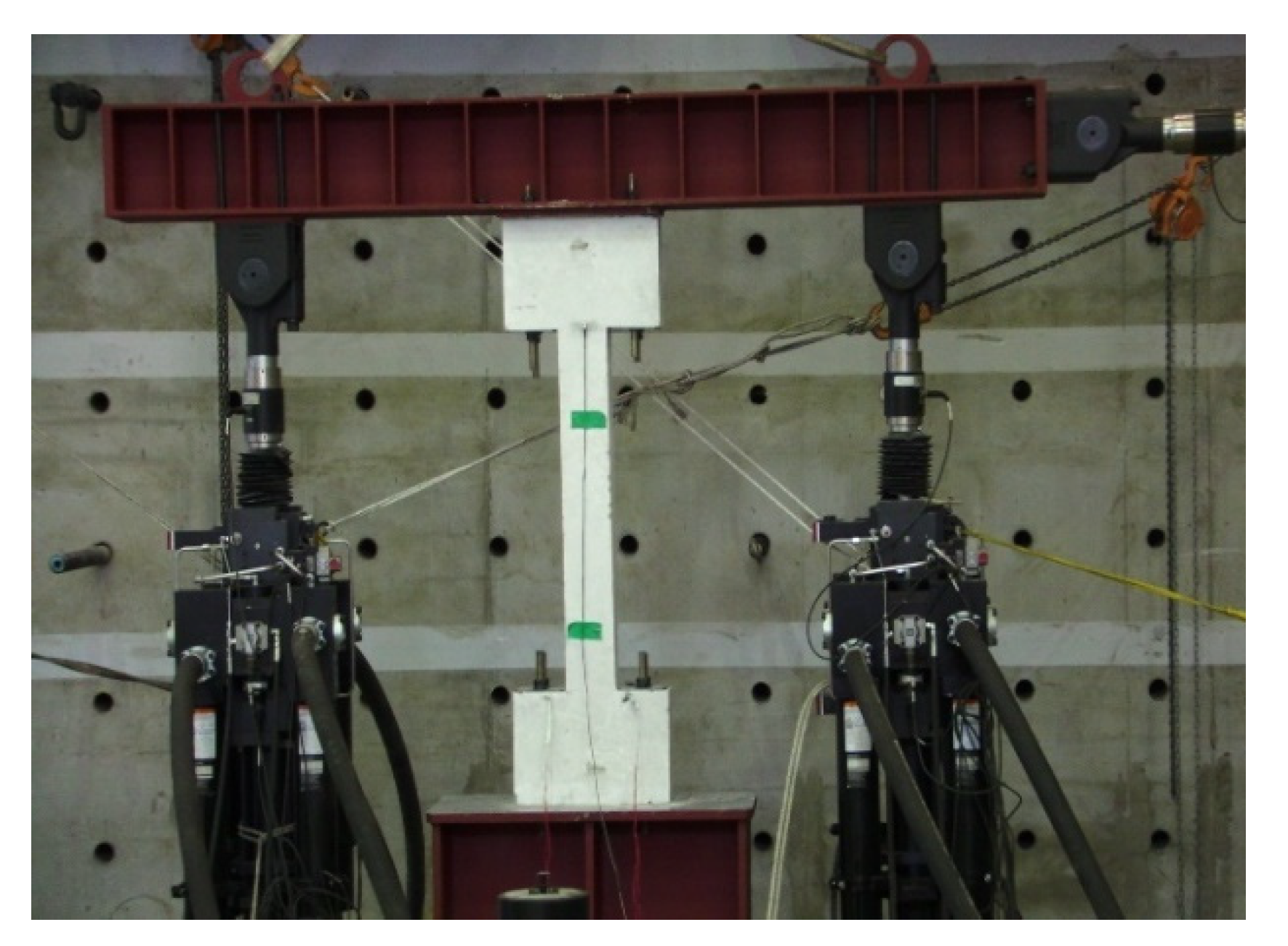
5.2.1. Test Set-Up and Input Properties
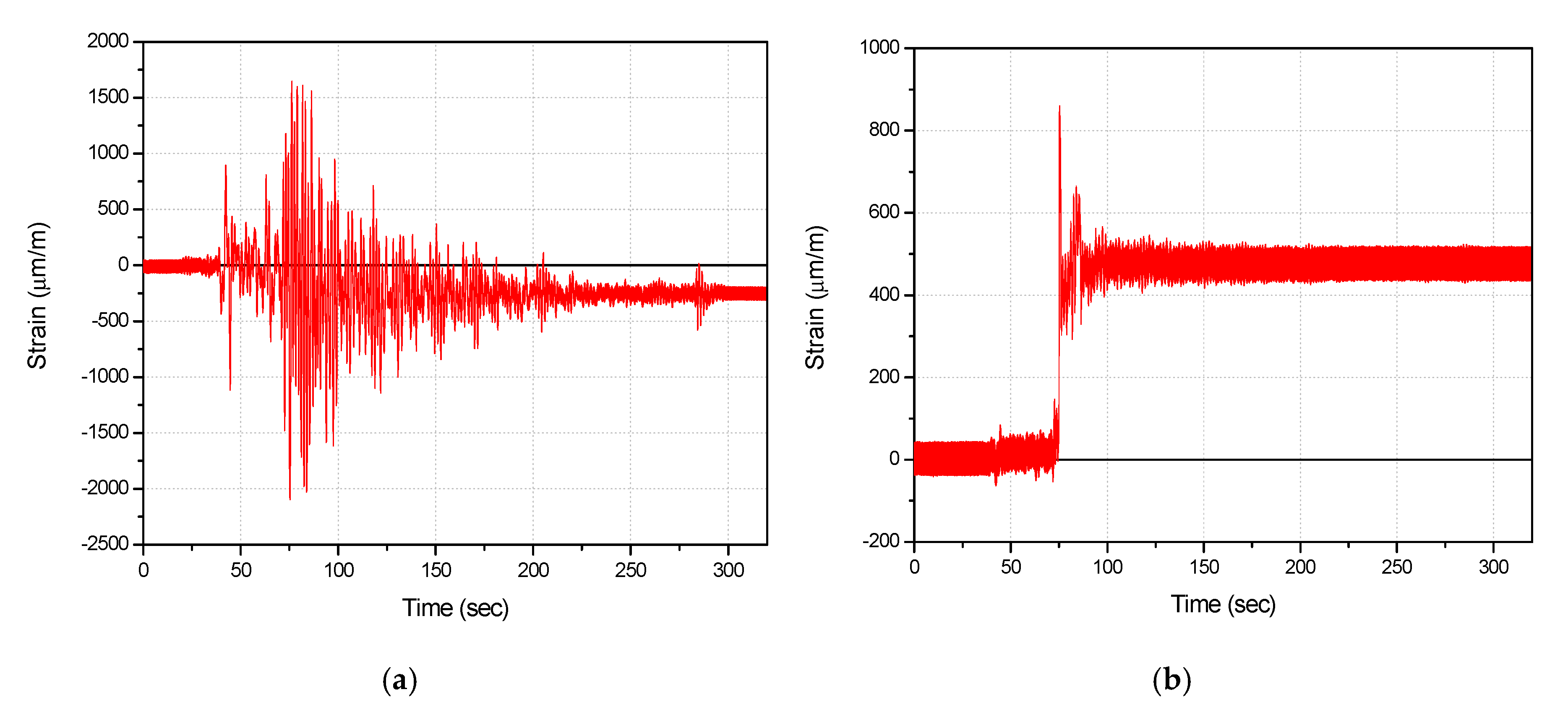
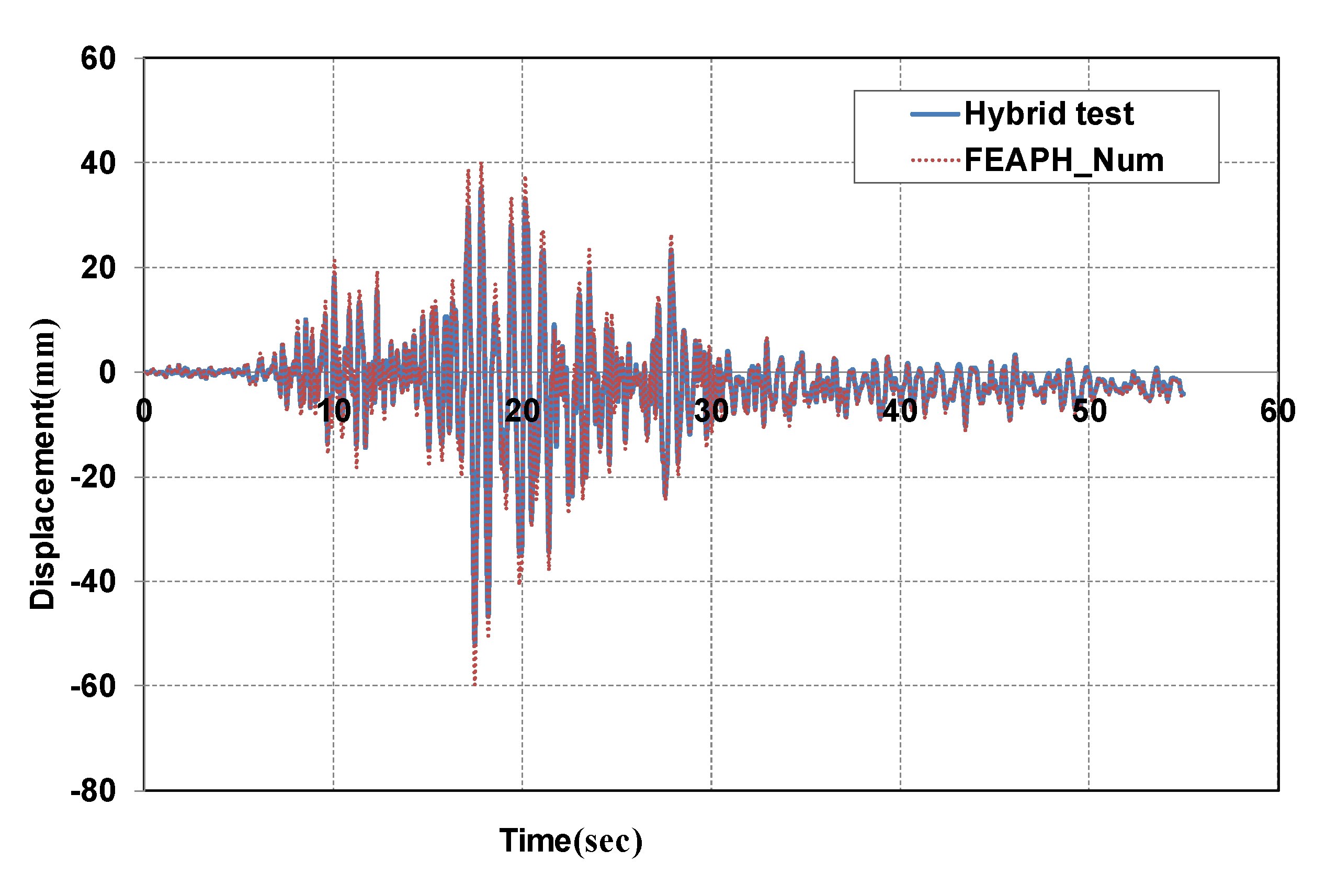
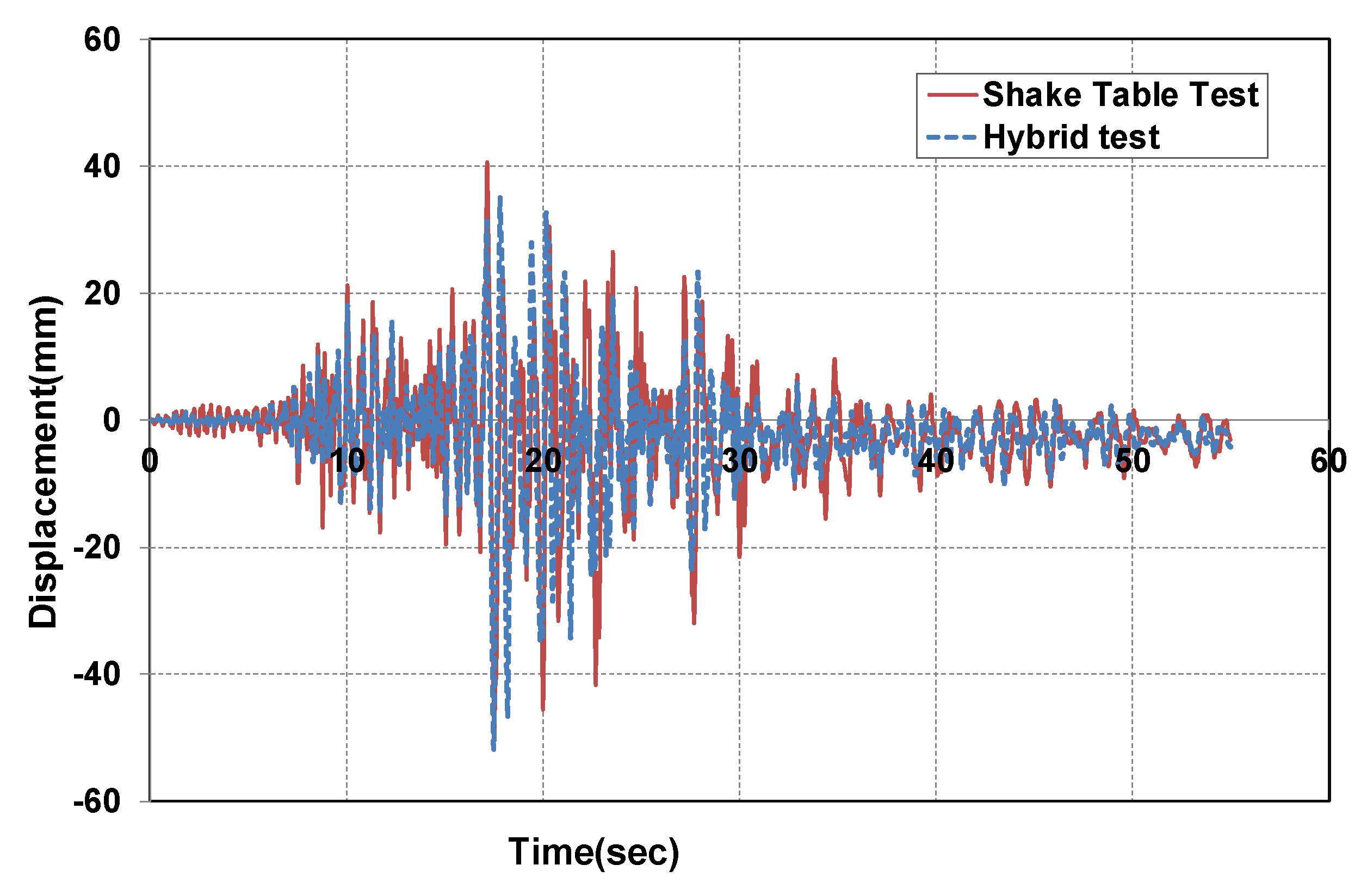
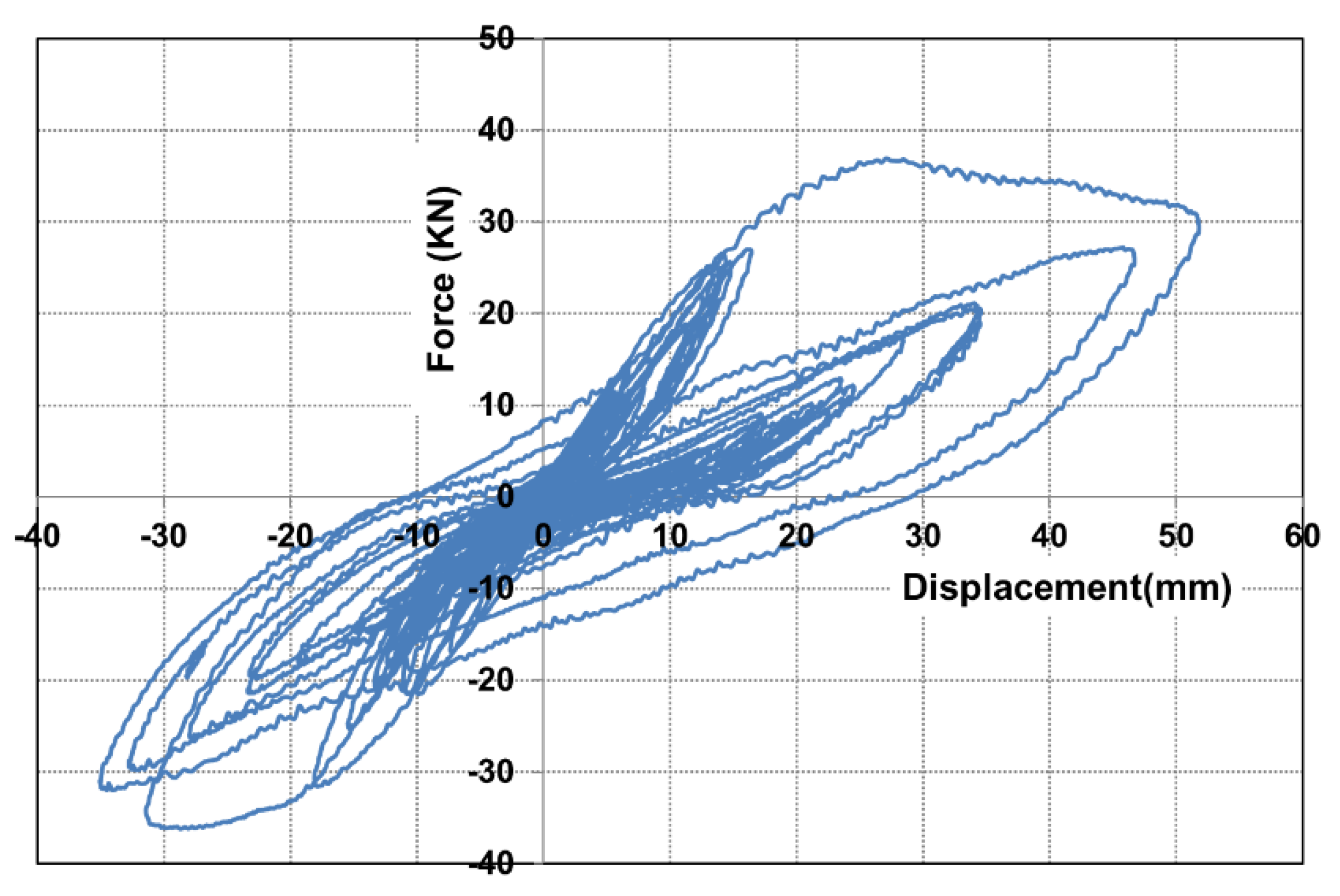
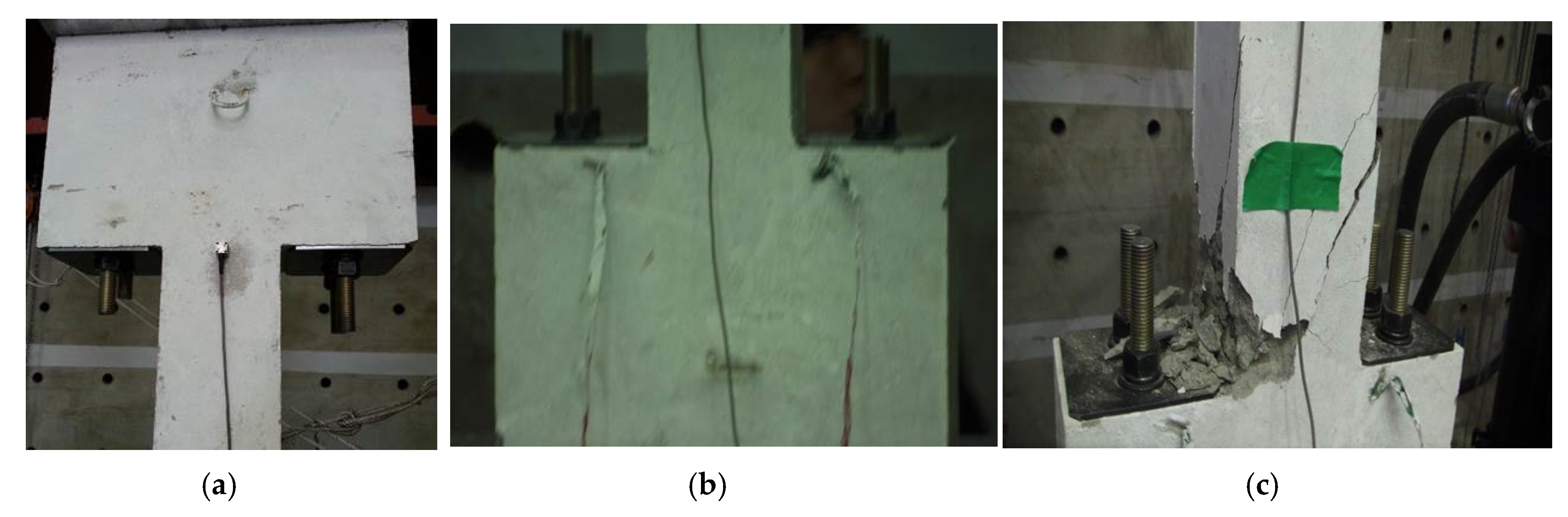
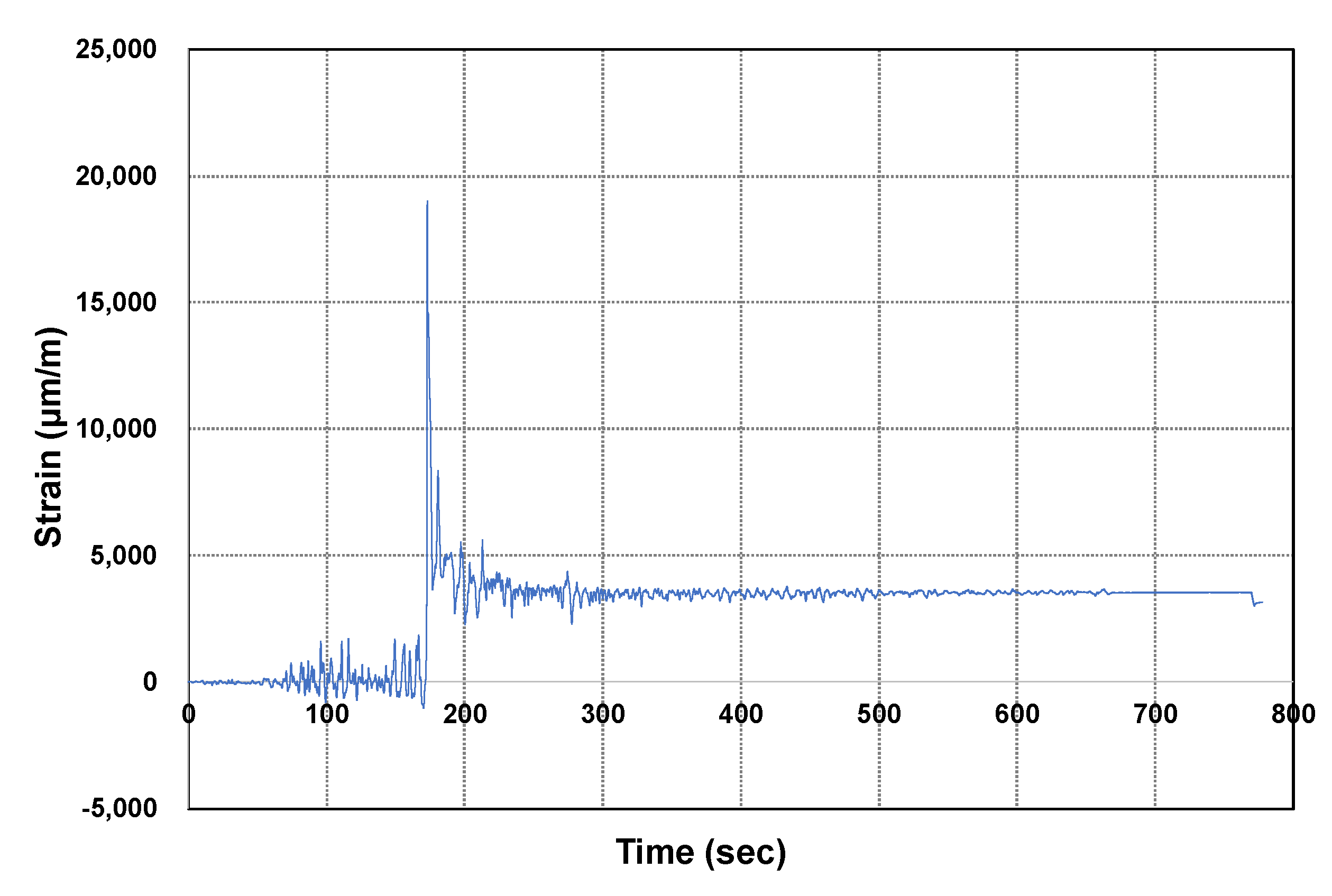
5.2.2. Non-Linear Dynamic Test with Real-Time Hybrid Control System
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kim, S.; Lee, D.; Cuong, N. Shaking table tests of a two-story unbraced steel frame. J. Korean Soc. Civ. Eng. 2005, 25, 601–609. [Google Scholar] [CrossRef]
- Hakuno, M.; Shidawara, M.; Hara, T. Dynamic destructive test of a cantilever beam controlled by an analog computer. Trans. Jpn. Soc. Civ. Eng. 1969, 171, 1–9. (In Japanese) [Google Scholar] [CrossRef]
- Takanashi, K.; Nakashima, M. Japanese activities on online testing. J. Eng. Mech. 1987, 113, 1014–1032. [Google Scholar] [CrossRef]
- Mahin, S.A.; Shing, P.S.B.; Thewalt, C.R.; Hanson, R.D. Pseudo-dynamic test method: Current status and future direction. J. Eng. Mech. 1989, 115, 2113–2128. [Google Scholar]
- Shing, P.B.; Nakashima, M.; Bursi, O.S. Application of pseudo-dynamic test method to structural research. Earthq. Spectra 1996, 12, 1121–1141. [Google Scholar] [CrossRef]
- Nakashima, M. Development, potential, and limitations of real-time online (pseudo-dynamic) testing. Phil. Trans. R. Soc. A. 2001, 359, 1851–1867. [Google Scholar] [CrossRef]
- Darby, A.P.; Blakeborough, A.; Williams, M.S. Real-time substructure tests using hydraulic actuator. J. Eng. Mech. 1999, 125, 1133–1139. [Google Scholar] [CrossRef]
- Darby, A.P.; Blakeborough, A.; Williams, M.S. Improved control algorithm for real-time substructure testing. Earthq. Eng. Struct. Dyn. 2001, 30, 431–448. [Google Scholar] [CrossRef]
- McKenna, F.T. Object-Oriented Finite Element Programming: Frameworks for Analysis, Algorithms, and Parallel Computing. Ph.D. Thesis, University of California, Berkeley, CA, USA, 1997. [Google Scholar]
- Fenves, G.L.; McKenna, F.; Scott, M.H.; Takahashi, Y. An object-oriented software environment for collaborative network simulation. In Proceedings of the 13th WCEE, Vancouver, BC, Canada, 1–6 August 2004. [Google Scholar]
- Schellenberg, A.; Mahin, S. Integration of hybrid simulation within the general-purpose computational framework OpenSees. In Proceedings of the 8th National Conference on Earthquake Engineering, EERI, San Francisco, CA, USA, 18–22 April 2006. [Google Scholar]
- Jung, R.Y.; Shing, P.B. Performance evaluation of a real-time pseudo-dynamic test system. Earthq. Eng. Struct. Dyn. 2006, 35, 789–810. [Google Scholar] [CrossRef]
- Bonnet, P.A. The Development of Multi-Axis Real-Time Substructure Testing. Ph.D. Thesis, University of Oxford, England, UK, 2006. [Google Scholar]
- Abbiati, G.; Whyte, C.A.; Dertimanis, V.K.; Stojadinovic, B. Hybrid simulation of large-scale structures at ETH Zürich: The new 8-actuator multi-axial subassemblage testing (MAST) setup. In Proceedings of the 16th World Conference on Earthquake, Santiago, Chile, 9–13 January 2017. [Google Scholar]
- Chen, Z.; Wang, H.; Wang, H.; Jiang, H.; Zhu, X.; Wang, K. Application of the Hybrid Simulation Method for the Full-Scale Precast Reinforced Concrete Shear Wall Structure. Appl. Sci. 2018, 8, 252. [Google Scholar] [CrossRef]
- Kang, D.H. An Optimized Computational Environment for Real-Time Hybrid Simulation. Ph.D. Thesis, University of Colorado, Boulder, CO, USA, 2010. [Google Scholar]
- Saouma, V.; Kang, D.H.; Haussmann, G. A computational finite element program for hybrid simulation. Earthq. Eng. Struct. Dyn. 2011, 41, 375–389. [Google Scholar] [CrossRef]
- Dion, C.; Bouaanani, N.; Tremblay, R.; Lamarche, C.P.; Leclerc, M. Real-Time Hybrid Testing of Seismic Protective Systems for Bridge Structures. In Proceedings of the 9th U.S. National and 10th Canadian Conference on Earthquake Engineering, Toronto, ON, Canada, 25–29 July 2010. [Google Scholar]
- Tsitos, A.; Bousias, S.; Dimitropoulou, E. Hybrid Testing of Bridge Structures Supported on Elastomeric Bearings. In Proceedings of the 15 WCEE, Lisabon, Portugal, 24–28 September 2012. [Google Scholar]
- Jiang, Z.; Kim, S.J.; Plude, S.; Christenson, R. Real-time hybrid simulation of a complex bridge model with MR dampers using the convolution integral method. Smart Mater. Struct. 2013, 22, 1–10. [Google Scholar] [CrossRef]
- Abbiati, G.; Bursi, O.S.; Caperan, P.; Sarno, L.D.; Molina, F.J.; Paolacci, F.; Pegon, P. Hybrid simulation of a multi-span RC viaduct with plain bars and sliding bearings. Earthquake Engng Struct. Dyn. 2015, 44, 2221–2240. [Google Scholar] [CrossRef]
- Vilsen, S.A.; Sauder, T.; Sorensen, A.J.; Fore, M. Method for Real-Time Hybrid Model Testing of Ocean Structures: Case Study on Horizontal Mooring Systems. Ocean. Eng. 2019, 172, 46–58. [Google Scholar] [CrossRef]
- Chang, Y.Y.; Yang, Y.S.; Wang, S.J.; Lin, M.L.; Weng, Y.T.; Wang, K.J.; Deng, H.Z.; Lau, D.T.; Tsai, K.C. Hybrid Testing of a Multi-Span Bridge. In Proceedings of the Advances in Experimental Structural Engineering, Nagoya, Japan, 19–21 July 2005; pp. 307–314. [Google Scholar]
- Bousias, S.; Sextos, A.; Kwon, O.S.; Taskari, O.; Elnashai, A.; Evangeliou, N.; Di Sarno, L. Intercontinental Hybrid Simulation for the Assessment of a Three-Span R/C Highway Overpass. J. Earthq. Eng. 2019, 23, 1194–1215. [Google Scholar] [CrossRef]
- Cho, S. Improvement of Hybrid Test System and Its Application to a Small Experimental Model. Ph.D. Thesis, MyongJi University, Seoul, South Korea, 2011. [Google Scholar]
- Lee, J. Evaluation of Applicability and Reliability for Hybrid Testing. Ph.D. Thesis, Inha University, Incheon, South Korea, 2012. [Google Scholar]
- Kim, S.; Na, O.; Kim, S.; Kang, D.H. Single degree of freedom hybrid dynamic test with steel frame structure. J. Korean Soc. Railw. 2012, 5, 413–421. [Google Scholar] [CrossRef]
- Wei, Z. Fast Hybrid Test System for Substructure Evaluation. Ph.D. Thesis, University of Colorado, Boulder, CO, USA, 2005. [Google Scholar]
- Chen, C.; Ricles, J.M. Analysis of implicit HHT-α integration algorithm for real-time hybrid simulation. Earthq. Eng. Struct. Dyn. 2012, 41, 1021–1041. [Google Scholar] [CrossRef]
- Chen, C.; Ricles, J.M.; Karavasilis, T.L.; Chae, Y.; Sause, R. Evaluation of a real-time hybrid simulation system for performance evaluation of structures with rate-dependent devices subjected to seismic loading. Eng. Struct. 2012, 35, 71–82. [Google Scholar] [CrossRef]
- American Institute of Steel Construction Inc. Seismic Provisions for Structural Steel Buildings; AISC: Chicago, IL, USA, 2002; pp. 383–403. [Google Scholar]
- Ghannoum, W.M. Experimental and Analytical Dynamic Collapse Study of a Reinforced Concrete Frame with Light Transverse Reinforcement. Ph.D. Thesis, University of California, Berkeley, CA, USA, 2007. [Google Scholar]
- Karavasilis, T.L.; Ricles, J.M.; Sause, R.; Chen, C. Experimental Evaluation of the Seismic Performance of Steel Buildings with Passive Dampers Using Real-Time Hybrid Simulation. In Role of Seismic Testing Facilities in Performance-Based Earthquake Engineering. Geotechnical, Geological, and Earthquake Engineering; Fardis, M., Rakicevic, Z., Eds.; Springer: Dordrecht, The Netherlands, 2012; Volume 22, pp. 323–343. [Google Scholar]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| H (mm) | B (mm) | tf (mm) | tw (mm) | r (mm) | Ag (mm2) | Ix (106mm4) | Iy (106mm4) |
|---|---|---|---|---|---|---|---|
| 125 | 125 | 9 | 6.5 | 10 | 3031 | 8.47 | 2.92 |
| FEAPH_Num (A) | Shake Table Test (A) | ||
|---|---|---|---|
| Real-Time Hybrid Test (RTHT) (B) | Real-Time Hybrid Test (RTHT) (B) | ||
| Peak displacement error (%) 1 | 13.3 | 2.3 | |
| RMS (Root Mean Square) error | 0.799 | 0.203 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Na, O.; Park, J. Verification of Optimized Real-time Hybrid Control System for Prediction of Nonlinear Materials Behavior with 3-DOF Dynamic Test. Appl. Sci. 2020, 10, 4037. https://doi.org/10.3390/app10114037
Na O, Park J. Verification of Optimized Real-time Hybrid Control System for Prediction of Nonlinear Materials Behavior with 3-DOF Dynamic Test. Applied Sciences. 2020; 10(11):4037. https://doi.org/10.3390/app10114037
Chicago/Turabian StyleNa, Okpin, and Jejin Park. 2020. "Verification of Optimized Real-time Hybrid Control System for Prediction of Nonlinear Materials Behavior with 3-DOF Dynamic Test" Applied Sciences 10, no. 11: 4037. https://doi.org/10.3390/app10114037
APA StyleNa, O., & Park, J. (2020). Verification of Optimized Real-time Hybrid Control System for Prediction of Nonlinear Materials Behavior with 3-DOF Dynamic Test. Applied Sciences, 10(11), 4037. https://doi.org/10.3390/app10114037