Self-Adaptation of a Heterogeneous Swarm of Mobile Robots to a Covered Area



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction and Related Works
2. Previous Work and Study
3. Initial Conditions and Definitions of the Algorithm
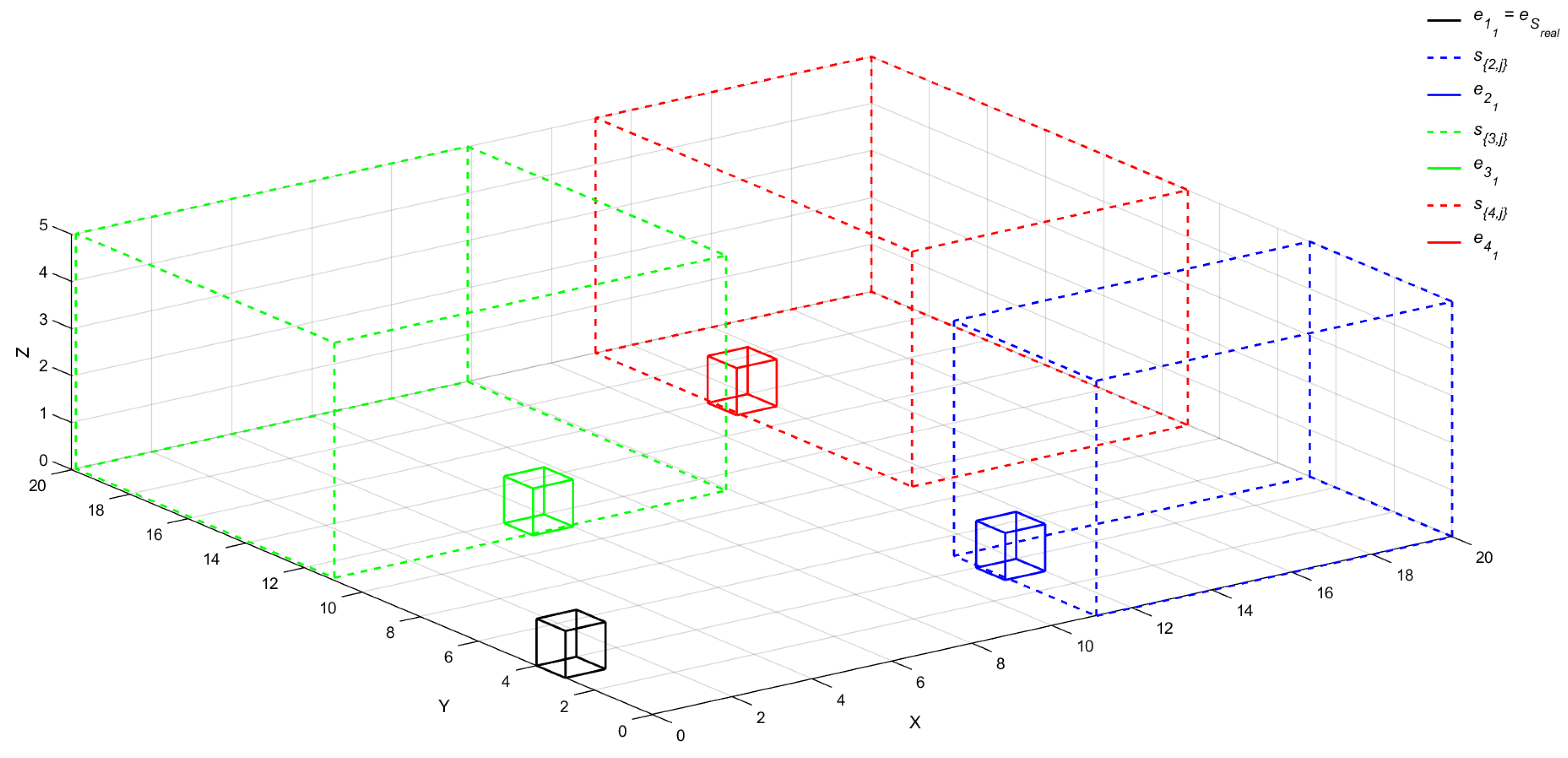
3.1. Space Representation
3.2. Agent Representation
- , respectively, are the time periods used when adding (removing) an agent into (from) the group ;
- , respectively, are the thresholds on the number of conflicts required to initiate a request for adding (removing) an agent to (from) the group , and the following conditions must be met ();
- , respectively, are timers of exploration time used when adding (removing) the agents;
- , respectively, are the conflict counters used when adding (removing) an agent into (from) the group ; and
- , respectively, represent the thresholds on the pheromone levels for adding (removing) the agent to (from) the group .
3.3. Pheromone Marks for an Indirect Communication between the Agents
- The first type indicates that there are too few agents in the given subspace to accomplish the task (exploration and monitor).
- The second type indicates that there are too many agents.
- The third type indicates the exploration/monitoring ability.
4. The Algorithms
- 0—An agent is waiting for a request;
- 1—An agent is moving to the entrance of the target subspace;
- 2—An agents is exploring or monitoring a space;
- 3—An agent has a request to add or to remove an agent related to its own group;
- 4—An agent has a request to add an agent into a group different than its own or agent found an entrance to new unexplored subspace;
- 5—An agent is waiting to be transported;
- 6—An agent is transporting another agent;
- 7—An agent is being transported by another agent.
4.1. Space Exploration/Monitoring Roles
- If the agent’s neighboring cells contain at least some non-zero pheromone values, the agent attempts to find the neighboring cell with the lowest pheromone value , , , cell. If there are multiple cells with the same low level of pheromones, then the agent chooses one of these cells at random. The agent moves to the selected cell in the next iteration if it does not conflict with other agents.
- If the cells neighboring the agent have only zero pheromone values, then the agent chooses at random one of these cells and stores the direction it has decided to move to. The agent then continues to move in the chosen direction , in the next iterations until its neighboring cells contain only zero pheromone values and if it does not conflict with other agents.
- If two or more agents intend to move into the same cell, a conflict occurs. In this situation, one of the agents is chosen randomly as a winner and it moves to the given cell in the next iteration. All the remaining agents participating in the conflict stay in their positions and wait for the next random tournament.
4.2. Population Management Role
- adding agents into the group and
- removing agents from the group.
4.2.1. Adding Agents into the Group
4.2.2. Removing Agents from the Group
4.3. Transportation Role
- the agent’s transportation (represented by states 5–7 in Figure 2),
- the creation of an addition request related to a different environment than the environment the given agent is capable of operating within (represented by state 4 in Figure 2), and
- the transfer of an addition request related to a group that is different than the group of the given agent (represented by state 4 in Figure 2).
4.3.1. Transport of an Agent
4.3.2. Creating a Request for Adding an Agent into a Subspace with an Environment Where the Request Creating Agent is Not Capable of Operation
4.3.3. Transfer of the Addition Request Related to the Addition of an Agent into a Group that Is Different than the Group of the Transferring Agent
4.4. Priority Rules
- -
- If all the neighbors are in state 3 and carry the same request (either to add or to remove an agent) then one of them is chosen randomly to remain in state 3 and the remaining agents change their state from 3 to 2 and reset their parameters , , , ; otherwise, (all the neighbors are in state 3 but carry different requests) all the neighbors change their state to 2 and reset their parameters to zero;
- -
- otherwise, if the neighbors are in states 2 and 3 then one of them is randomly chosen to remain in state 3 and the remaining agents change their state to 2; the agents in state 2 reset their counters , , , ;
- -
- otherwise, if the neighbors are in state 4 but they must carry the same request and in state 2 one of them is chosen randomly to remain in state 4 and the remaining agents change their state to 2; the agents in state 2 reset their counters , , , ;
- -
- otherwise, if the neighbors are in other states they will remain in their respective states and reset their counters.
5. Experiments
- experiments focused on the dynamic addition of agents,
- experiments focused on the dynamic removal of agents, and
- experiments focused on the interaction between the dynamic removal and addition.
5.1. Simple Experiments—The Dynamic Addition of Agents
5.2. Simple Experiments—The Dynamic Removal of Agents from the Group
5.3. Simple Experiments—The Interaction between Dynamic Removal and Addition
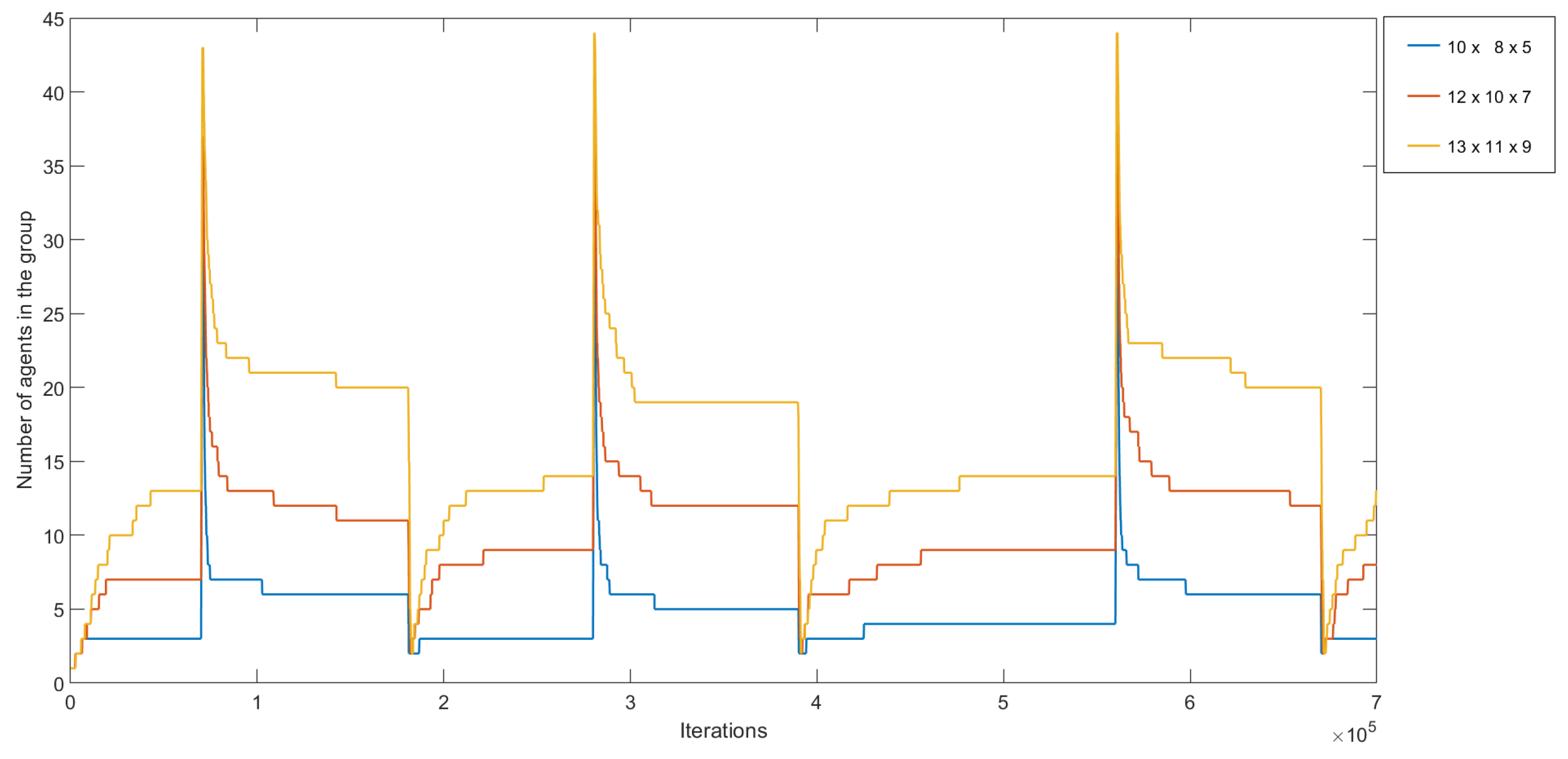
5.4. Complex Experiments—Experiments Focused on the Interactions between Dynamic Removal and Addition
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Margolus, N. Physics and Computation. Ph.D. Thesis, MIT Lab. for Computer Science, Cambridge, MA, USA, 1987. [Google Scholar]
- Bijan, R.S.; Weiss, G.; Nakisaee, A. A Multi-Robot Coverage Approach Based on Stigmergic Communication. In German Conference on Multiagent System Technologies; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Ventocilla, E. Swarm-Based Area Exploration and Coverage based on Pheromones and Bird Flocks (Dissertation). 2013. Available online: http://urn.kb.se/resolve?urn=urn:nbn:se:uu:diva-212190 (accessed on 20 May 2020).
- Iocchi, L.; Nardi, D.; Salerno, M. Reactivity and Deliberation: A Survey on Multi-Robot Systems. In Balancing Reactivity and Social Deliberation in Multi-Agent Systems; From RoboCup to Real-World Applications; Springer: Berlin, Germany, 2013; pp. 9–32. [Google Scholar]
- Navarro, I.; Matía, F. An Introduction to Swarm Robotics. ISRN Robot. 2013, 2013, 1–10. [Google Scholar] [CrossRef]
- Sahin, E. Swarm Robotics: From Sources of Inspiration to Domains of Application. In Swarm Robotics Workshop: State-of-the-Art Survey; Şahin, E., Spears, W., Eds.; Lecture Notes in Computer Science; Springer: Berlin, Germany, 2005; pp. 10–20. [Google Scholar]
- Patil, M.; Abukhalil, T.; Patel, S.; Sobh, T. Ub swarm: Hardware implementation of heterogeneous swarm robot with fault detection and power management. Int. J. Comput. 2016, 15, 162–176. [Google Scholar]
- Agmon, N.; Hazon, N.; Kaminka, G.A. The giving tree: Constructing trees for efficient offline and online multi-robot coverage. Ann. Math. Artif. Intell. 2008, 52, 143–168. [Google Scholar] [CrossRef]
- Sauter, A.J.; Matthews, R.; Van, H.; Parunak, D.; Brueckner, A.B. Performance of Digital Pheromones for Swarming Vehicle Control. In Proceedings of Fourth International Joint Conference on Autonomous Agents and Multi-Agent Systems; ACM Press: Utrecht, The Netherlands, 2005; pp. 903–910. ISBN 1-59593-093-0. [Google Scholar] [CrossRef]
- Senthilkumar, K.S.; Bharadwaj, K.K. Multi-robot exploration and terrain coverage in an unknown environment. Robot. Auton. Syst. 2012, 60, 123–132. [Google Scholar] [CrossRef]
- Cheng, P.; Keller, J.; Kumar, V. Time-Optimal UAV Trajectory Planning for 3d Urban Structure Coverage. In Proceedings of the Intelligent Robots and Systems, IROS’08, Nice, France, 22–26 September 2008; pp. 2750–2757. [Google Scholar]
- Hert, S.; Tiwari, S.; Lumelsky, V. A terrain-covering algorithm for an UAV. Auton. Robot. 2006, 3, 91–119. [Google Scholar] [CrossRef]
- Lee, T.-S.; Choi, J.-S.; Lee, J.-H.; Lee, B.-H. 3-d Terrain Covering and Map Building Algorithm for an UAV. In Proceedings of the Intelligent Robots and Systems, IROS’09, St. Louis, MO, USA, 10–15 October 2009; pp. 4420–4425. [Google Scholar]
- Atkar, P.N.; Choset, H.; Rizzi, A.A.; Acar, E.U. Exact Cellular Decomposition of Closed Orientable Surfaces Embedded in 3. In Proceedings of the 2001 ICRA IEEE International Conference on Robotics and Automation, Seoul, Korea, 21–26 May 2001; Volume 1, pp. 699–704. [Google Scholar]
- Atkar, P.; Greenfield, A.L.; Conner, D.C.; Choset, H.; Rizzi, A. Uniform coverage of automotive surface patches. Int. J. Robot. Res. 2005, 24, 883–898. [Google Scholar] [CrossRef]
- Oksanen, T.; Visala, A. Coverage path planning algorithms for agricultural field machines. J. Field Robot. 2009, 26, 558–651. [Google Scholar] [CrossRef]
- Xu, A.; Viriyasuthee, C.; Rekleitis, I. Optimal Complete Terrain Coverage Using an Unmanned Aerial Vehicle. In Proceedings of the Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 2513–2519. [Google Scholar]
- Barrientos, A.; Colorado, J.; Cerro, J.; Martinez, A.; Rossi, C.; Sanz, D.; Valente, J. Aerial remote sensing in agriculture: A practical approach to area coverage and path planning for fleets of mini aerial robots. J. Field Robot. 2011, 28, 667–689. [Google Scholar] [CrossRef]
- Kappel, K.S.; Cabreira, T.M.; Marins, J.L.; De Brisolara, L.B.; Ferreira, P.R. Strategies for Patrolling Missions with Multiple UAVs. J. Intell. Robot. Syst. 2019, 1–17. [Google Scholar] [CrossRef]
- Abukhalil, T.; Patil, M.; Patel, S.; Sobh, T. Deployment environment for a swarm of heterogeneous robots. Robotics 2016, 5, 22. [Google Scholar] [CrossRef]
- Cristobal, M.J. Autonomous Exploration and Mapping of Unknown Environments with Teams of Mobile Robots. 2013. Available online: http://docplayer.net/11615759-Autonomous-exploration-and-mapping-of-unknown-environments-with-teams-of-mobile-robots.html (accessed on 20 May 2020).
- Ducatelle, F.; Di Caro, G.A.; Gambardella, L.M. Cooperative Self-Organization in a Heterogeneous Swarm Robotic System. In Proceedings of the 12th Annual Conference on Genetic and Evolutionary Computation (GECCO ’10), Portland, OR, USA, 7–11 July 2010; Association for Computing Machinery: New York, NY, USA, 2010; pp. 87–94. [Google Scholar] [CrossRef]
- Zelinsky, A.; Jarvis, R.A.; Byrne, J.C.; Yuta, S. Planning Paths of Complete Coverage of an Unstructured Environment by a Mobile Robot. In Proceedings of International Conference on Advanced Robotics, Tsukuba, Japan, 8–9 November 1993; pp. 533–538. [Google Scholar]
- Carsten, J.; Ferguson, D.; Stentz, A. 3D Field D: Improved Path Planning and Replanning in Three Dimensions. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS’06, Beijing, China, 9–15 October 2006; pp. 3381–3386. [Google Scholar]
- Koenig, S.; Szymanski, B.; Liu, Y. Efficient and inefficient ant coverage methods. Ann. Math. Artif. Intell. 2011, 31, 41–76. [Google Scholar] [CrossRef]
- Masár, M.; Budinská, I. Robot Coordination Based on Biologically Inspired Methods. In Advanced Materials Research; Trans Tech Publications Ltd.: Stafa-Zurich, Switzerland, 2013; Volume 664, pp. 891–896. [Google Scholar]
- Burgard, W.; Moors, M.; Stachniss, C.; Schneider, F.E. Coordinated multi-robot exploration. IEEE Trans. Robot. 2017, 21, 376–386. [Google Scholar] [CrossRef]
- Wagner, I.; Lindenbaum, M.; Bruckstein, A. Distributed Covering by Ant-Robots Using Evaporating Traces. IEEE Trans. Robot. Autom. 1999, 15, 918–933. [Google Scholar] [CrossRef]
- Chu, H.; Glad, A.; Simonin o Sempe, F.; Drogoul, A.; Charpillet, F. Swarm Approaches for the Patrolling Problem, Information Propagationvs, Pheromone Evaporation. In Proceedings of the ICTAI’07 IEEE International Conference on Tools with Artificial Intelligence, Patras, Greece, 29–31 October 2007; pp. 442–449. [Google Scholar]
- Yanovski, V.; Wagner, I.A.; Bruckstein, A.M. A Distributed Ant Algorithm for Efficiently Patrolling a Network. Algorithmica 2013, 73, 165–186. [Google Scholar] [CrossRef]
- Rosalie, M.; Danoy, G.; Chaumette, S.; Bouvry, P. From Random Process to Chaotic Behavior in Swarms of UAVs. In Proceedings of the 6th ACM Symposium on Development and Analysis of Intelligent Vehicular Networks and Applications, Malta, Malta, 13–17 November 2016; pp. 9–15. [Google Scholar] [CrossRef]
- Kilin, A.; Božek, P.; Karavaev, Y.; Klekovkin, A.; Shestakov, V. Experimental investigations of a highly maneuverable mobile omniwheel robot. Int. J. Adv. Robot. Syst. 2017, 14. [Google Scholar] [CrossRef]
- Božek, P.; Blišťan, P.; Al Akkad, M.A.; Ibrahim, N.I. Navigation control and stability investigation of a mobile robot based on a hexacopter eqipped with an integrated manipulator. Int. J. Adv. Robot. Syst. 2017, 14. [Google Scholar] [CrossRef]
- Patil, M.; Abukhalil, T.; Sobh, T. Hardware Architecture Review of Swarm Robotics System: Self-Reconfigurability, Self-Reassembly, and Self-Replication. ISRN Robot. 2013, 2013, 849606. [Google Scholar] [CrossRef]
- Zelenka Jand Kasanický, T. Insect Pheromone Strategy for the Robots Coordination—Reaction on Loss Communication. In Proceedings of the 2014 IEEE 15th International Symposium on Computational Intelligence and Informatics (CINTI) 2014, Budapest, Hungary, 19–21 November 2014; pp. 79–83. [Google Scholar]
- Zelenka, J.; Kasanický, T. Outdoor UAV Control and Coordination System Supported by Biological Inspired Method. In Proceedings of the 2014 23rd International Conference on Robotics in Alpe-Adria-Danube Region (RAAD) 2014, Smolenice, Slovakia, 3–5 September 2014; Slovak University of Technology in Bratislava: Bratislava, Slovakia, 2014. ISBN 978-1-4799-6798-8. [Google Scholar]
- Cao, Y.U.; Fukunaga, A.S.; Kahng, A.B. Cooperative mobile robotics: Antecedents and directions. Auton. Robot. 1997, 4, 226–234. [Google Scholar] [CrossRef]
- Zelenka, J.; Kasanický, T. Control and Coordination System Supported by Biologically Inspired Method for 3D Space “Proof of Concept”. In Advances in Intelligent Systems and Computing: Advances in Robot Design and Intelligent Control; Springer: Cham, Switzerland, 2015; Volume 371, pp. 147–156. ISBN 978-3-319-21289-0. [Google Scholar]
- Zelenka, J.; Kasanický, T. Control and Coordination System Supported by Biologically Inspired Method for 3D Space “Performance improvements”. In Proceedings of the 2015 IEEE 19th International Conference on Intelligent Engineering Systems (INES), Bratislava, Slovakia, 3–5 September 2015; pp. 265–269, ISBN 978-1-4673-7938-0. [Google Scholar]
- Zelenka, J.; Kasanický, T. A Self-adapting Method for 3D Environment Exploration Inspired by Swarm Behaviour. In Advances in Service and Industrial Robotics. RAAD 2017. Mechanisms and Machine Science; Ferraresi, C., Quaglia, G., Eds.; Springer: Cham, Switzerland, 2018; Volume 49. [Google Scholar]

















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zelenka, J.; Kasanický, T.; Bundzel, M.; Andoga, R. Self-Adaptation of a Heterogeneous Swarm of Mobile Robots to a Covered Area. Appl. Sci. 2020, 10, 3562. https://doi.org/10.3390/app10103562
Zelenka J, Kasanický T, Bundzel M, Andoga R. Self-Adaptation of a Heterogeneous Swarm of Mobile Robots to a Covered Area. Applied Sciences. 2020; 10(10):3562. https://doi.org/10.3390/app10103562
Chicago/Turabian StyleZelenka, Ján, Tomáš Kasanický, Marek Bundzel, and Rudolf Andoga. 2020. "Self-Adaptation of a Heterogeneous Swarm of Mobile Robots to a Covered Area" Applied Sciences 10, no. 10: 3562. https://doi.org/10.3390/app10103562
APA StyleZelenka, J., Kasanický, T., Bundzel, M., & Andoga, R. (2020). Self-Adaptation of a Heterogeneous Swarm of Mobile Robots to a Covered Area. Applied Sciences, 10(10), 3562. https://doi.org/10.3390/app10103562