A Robust Tracking Algorithm Based on a Probability Data Association for a Wireless Sensor Network


Abstract
1. Introduction
2. Problem Statement
2.1. Signal Model
2.2. A Brief Introduction of Existing Methods
3. Proposed Method
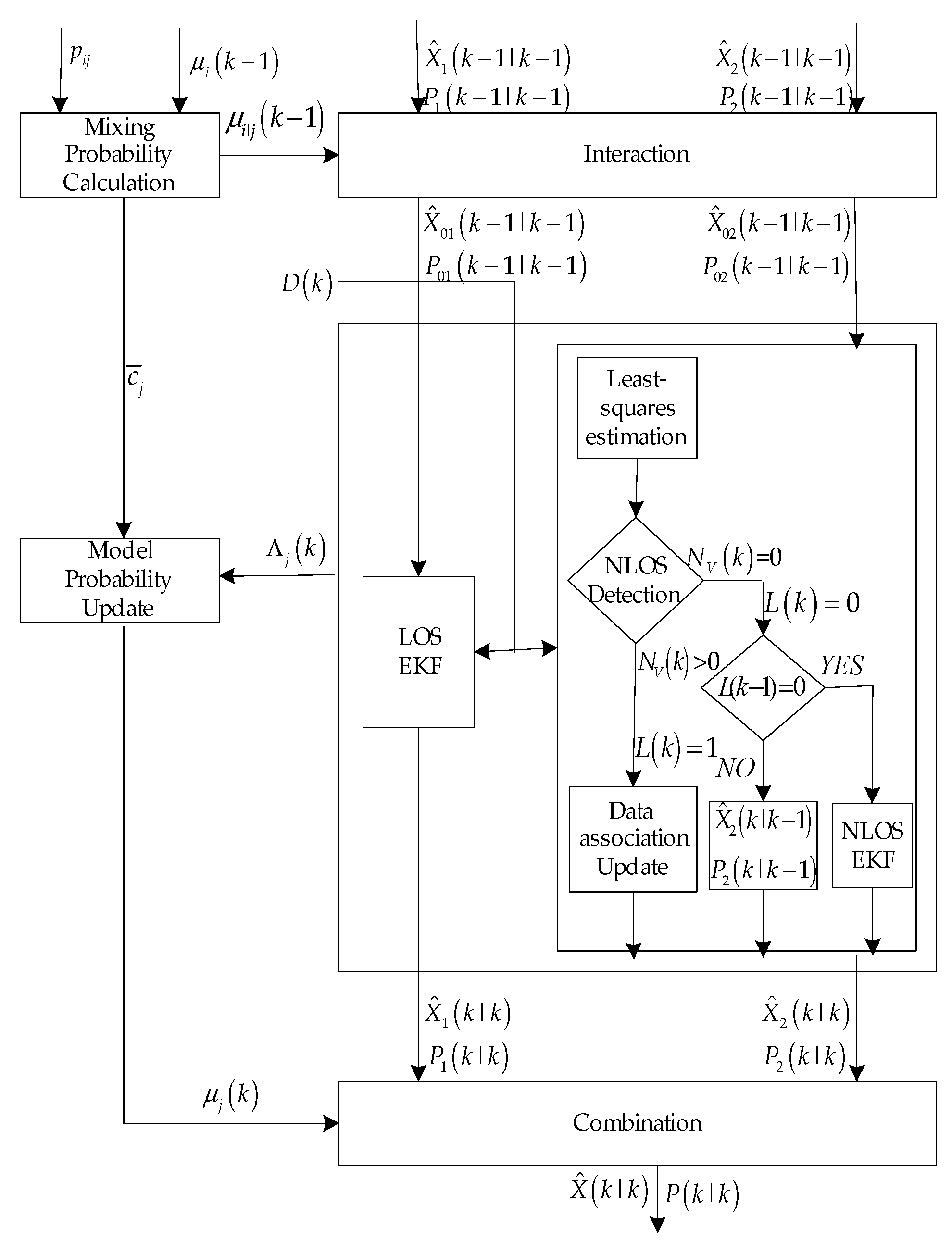
3.1. General Concept
3.2. Interaction
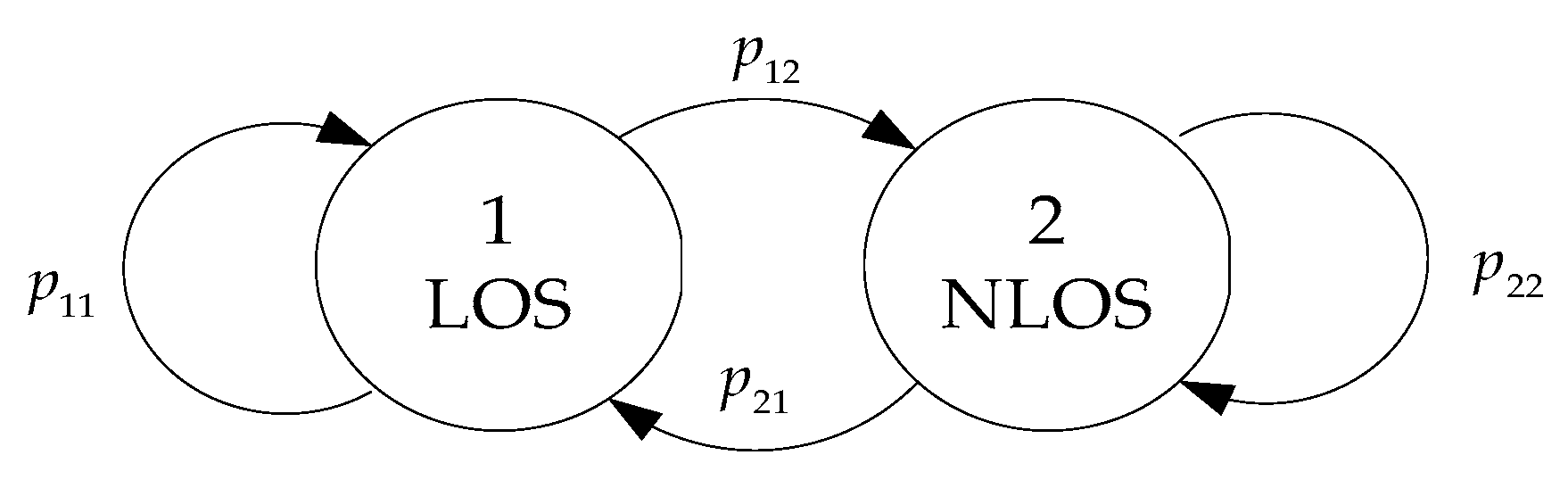
3.3. Model Matching
3.4. Model Probability Update
3.5. Combination
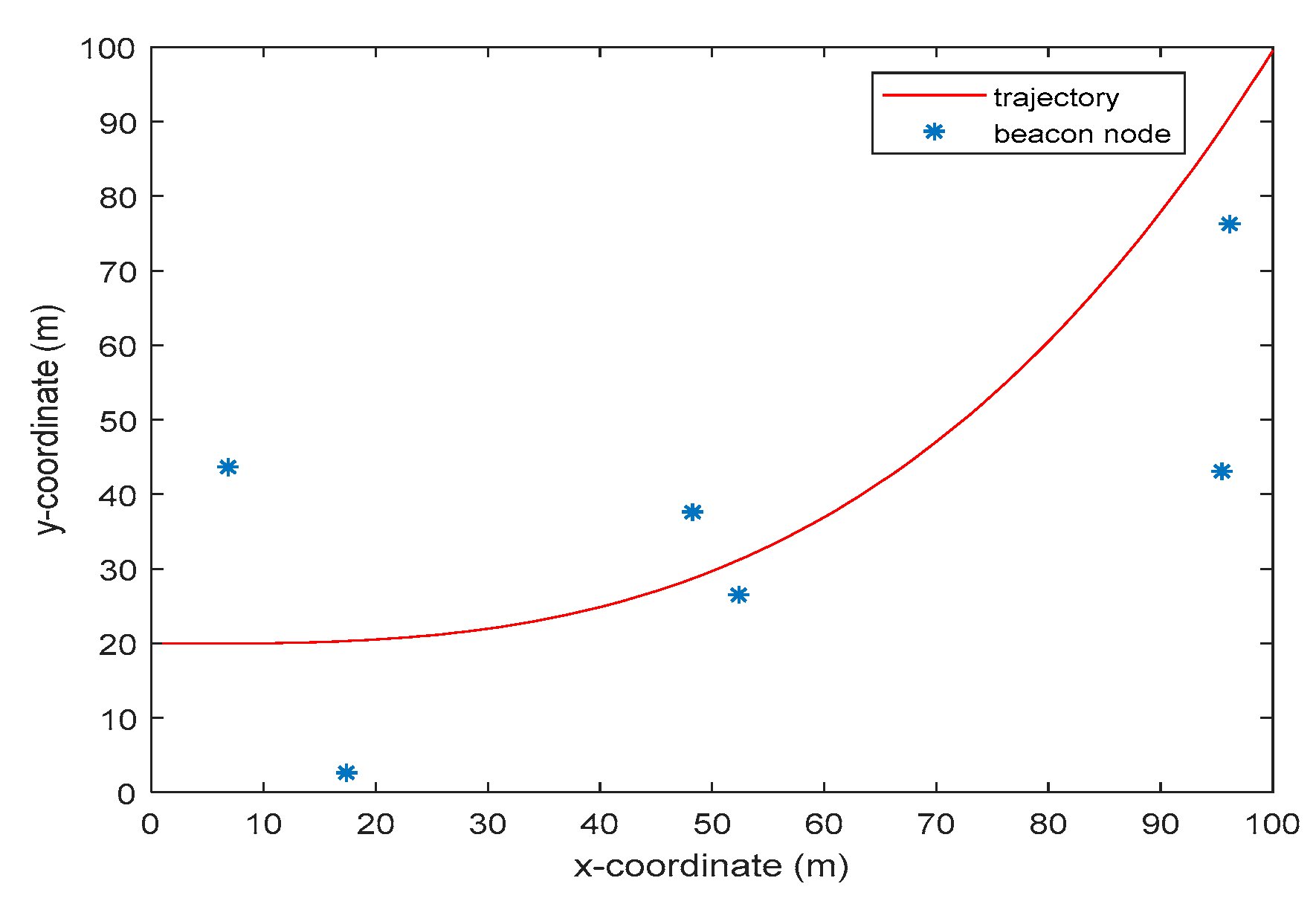
4. Experiment and Result Analysis
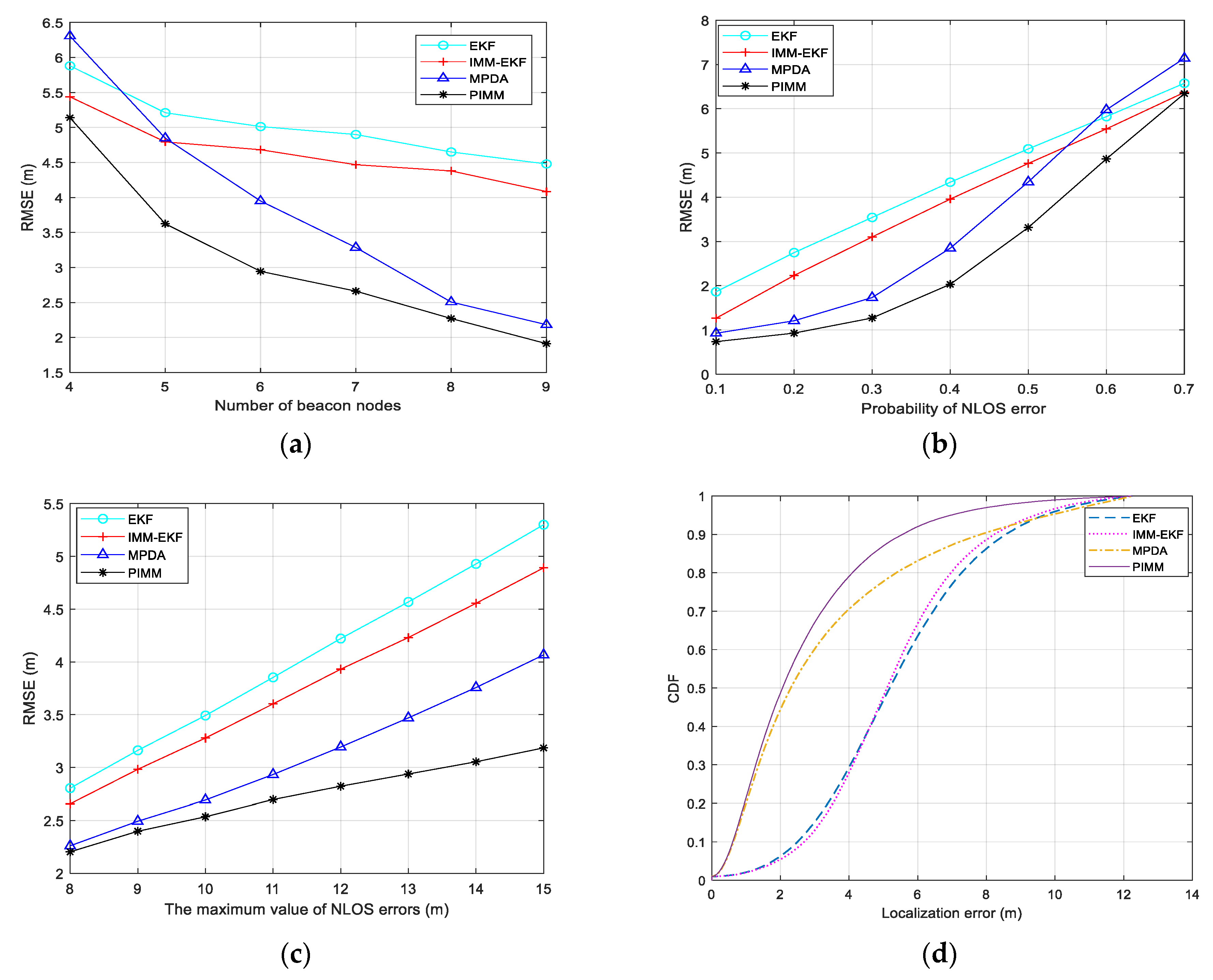
4.1. Gaussian Distribution
4.2. Uniform Distribution
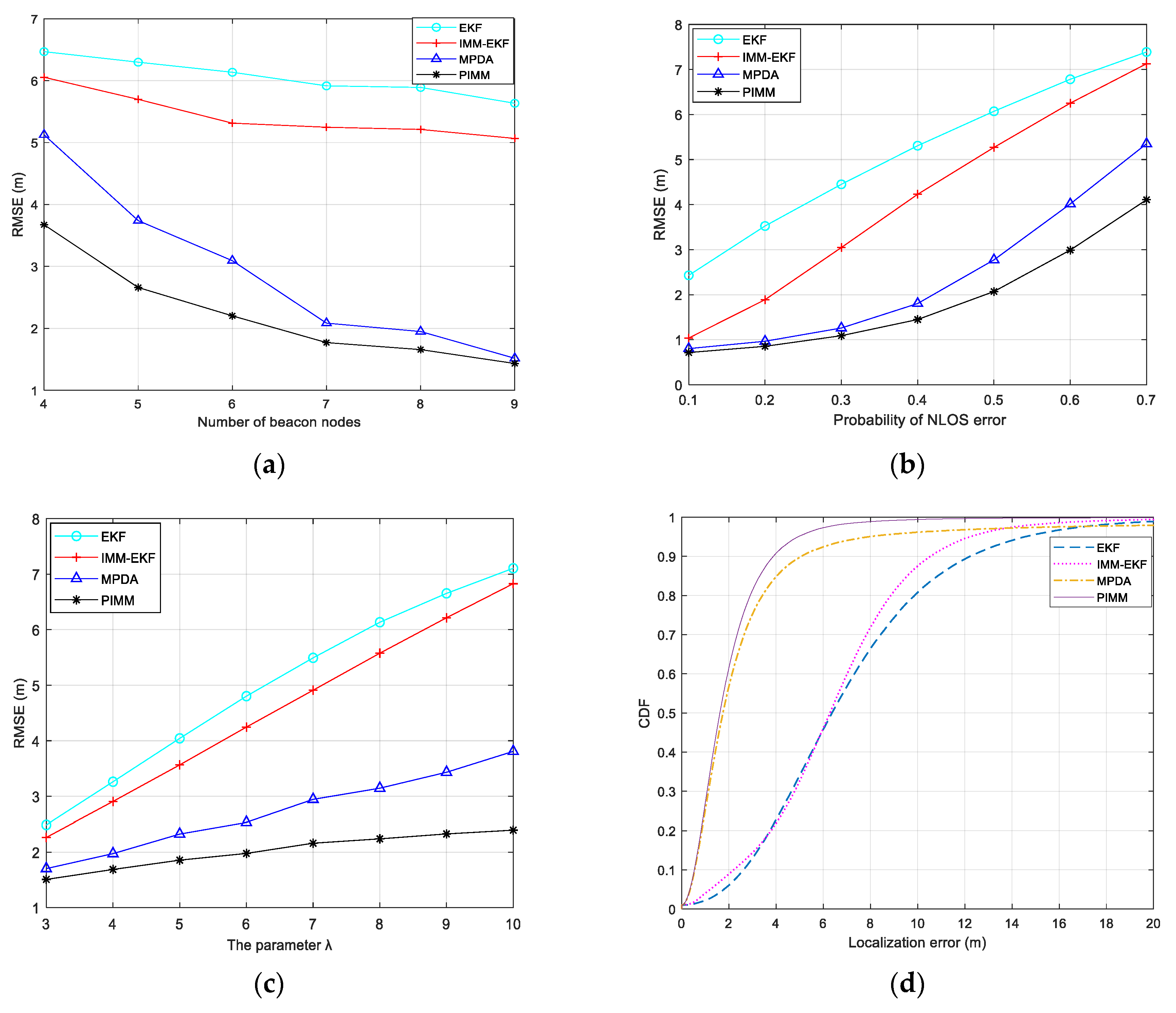
4.3. Exponential Distribution
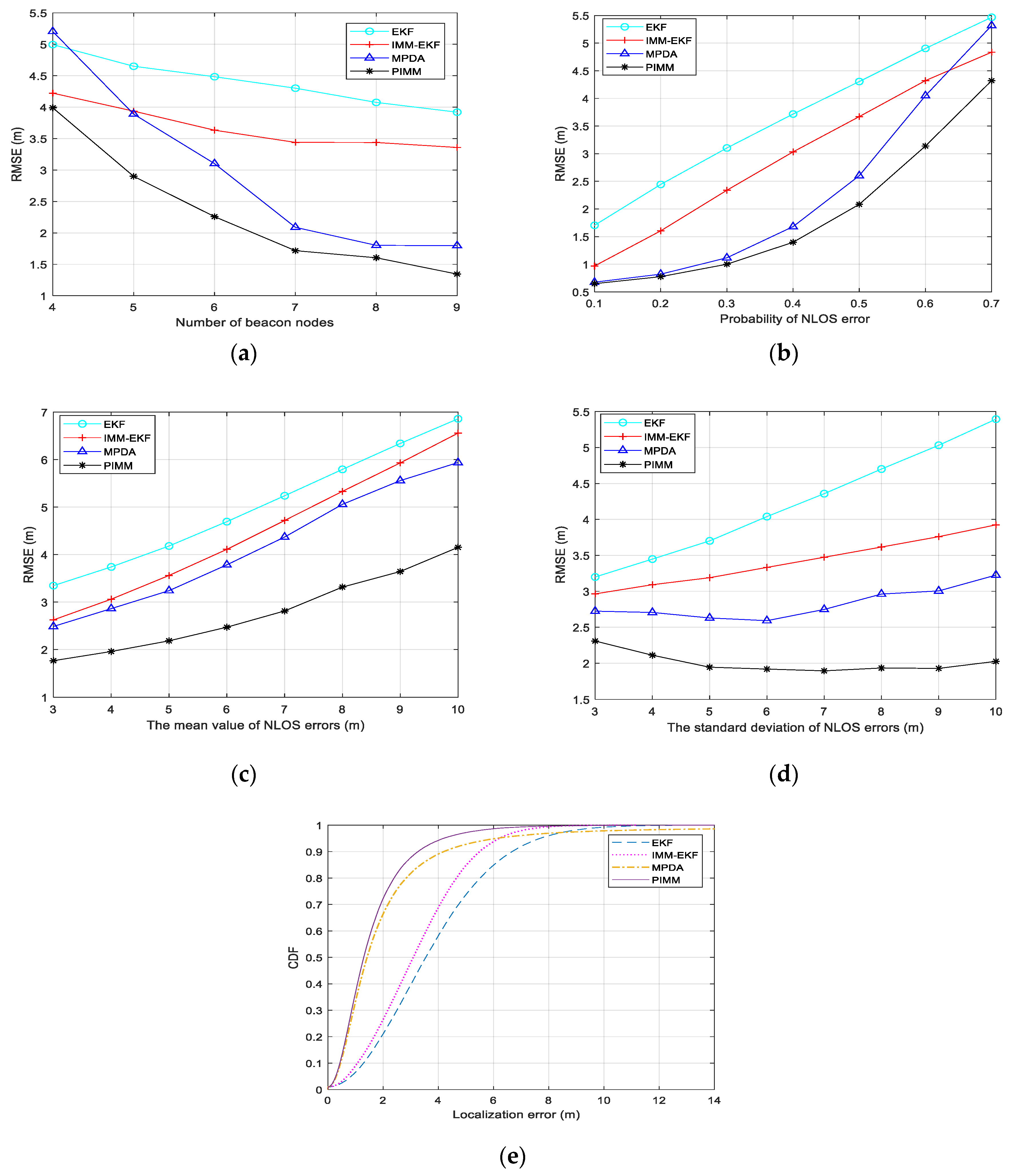
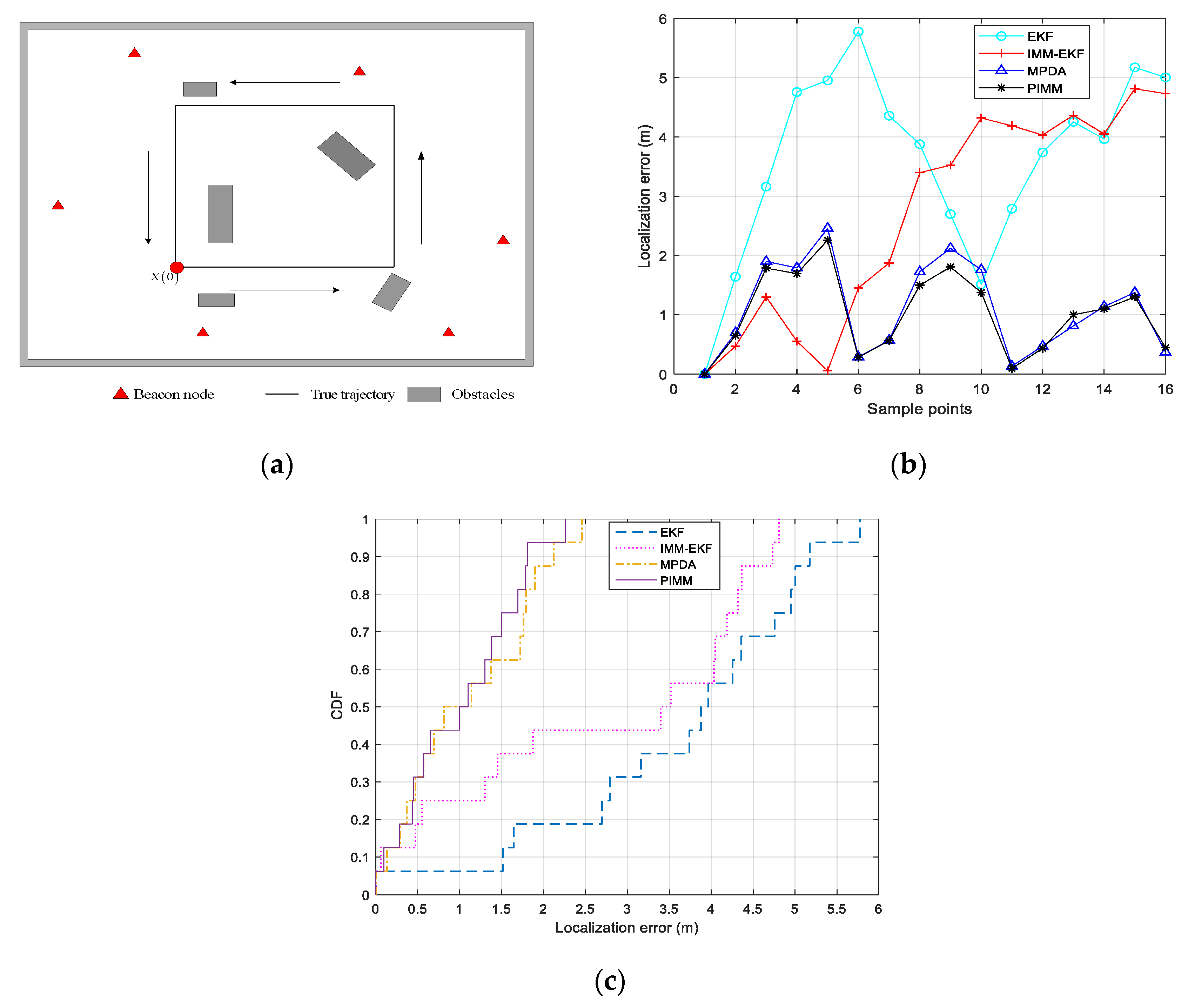
4.4. Experimental Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wylie, M.P.; Holtzman, J. The non-line of sight problem in mobile location estimation. In Proceedings of the IEEE ICUPC-5th International Conference on Universal Personal Communications, Cambridge, MA, USA, 2 October 1996; pp. 827–831. [Google Scholar]
- Su, Z.; Shao, G.; Liu, H. Semidefinite Programming for NLOS Error Mitigation in TDOA Localization. IEEE Commun. Lett. 2018, 22, 1430–1433. [Google Scholar] [CrossRef]
- Tomic, S.; Beko, M. A bisection-based approach for exact target localization in NLOS environments. Signal Process. 2018, 143, 328–335. [Google Scholar] [CrossRef]
- Yang, X.; Zhao, F.; Chen, T. NLOS identification for UWB localization based on import vector machine. Int. J. Electron. Commun. 2018, 87, 128–133. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhou, X.; Wang, Z.; Yan, H. Adaptive Consensus-Based Distributed Target Tracking With Dynamic Cluster in Sensor Networks. IEEE Trans. Cybern. 2019, 49, 1580–1591. [Google Scholar] [CrossRef]
- Li, Y.Y.; Qi, G.Q.; Sheng, A.D. Performance Metric on the Best Achievable Accuracy for Hybrid TOA/AOA Target Localization. IEEE Commun. Lett. 2018, 22, 1474–1477. [Google Scholar] [CrossRef]
- Sun, Y.M.; Zhou, Z.P.; Tang, S.L. 3D Hybrid TOA-AOA Source Localization Using an Active and a Passive Station. In Proceedings of the 2016 IEEE 13th International Conference on Signal Processing (ICSP), Chengdu, China, 6–10 November 2016; pp. 257–260. [Google Scholar]
- Vaghefi, R.M.; Buehrer, R.M. Cooperative Localization in NLOS Environments Using Semidefinite Programming. IEEE Commun. Lett. 2015, 19, 1382–1385. [Google Scholar] [CrossRef]
- Vaghefi, R.M.; Buehrer, R.M. Cooperative Source Node Tracking in Non-Line-of-Sight Environments. IEEE Trans. Mob. Comput. 2018, 16, 1287–1299. [Google Scholar] [CrossRef]
- Chen, P.C. A non-line-of-sight error mitigation algorithm in location estimation. In Proceedings of the IEEE Wireless Communications Networking Conference (WCNC), New Orleans, LA, USA, 21–24 September 1999; Volume 1, pp. 316–320. [Google Scholar]
- Park, C.H.; Chang, J.H. Robust Time-of-arrival Source Localization Employing Error Covariance of Sample Mean and Sample Median in Line-of-sight/Non-line-of-sight Mixture Environments. EURASIP J. Adv. Signal Process. 2016, 89, 1–11. [Google Scholar] [CrossRef]
- Jiao, L.; Xing, J.; Zhang, X. LCC-RWGH: A NLOS Error Mitigation Algorithm for Localization in Wireless Sensor Network. In Proceedings of the 2007 IEEE International Conference on Control and Automation, Guangzhou, China, 30 May–1 June 2007; pp. 1354–1359. [Google Scholar]
- Xing, J.; Zhang, J.; Jiao, L. A Robust Wireless Sensor Network Localization Algorithm in NLOS Environment. In Proceedings of the 2007 IEEE International Conference on Control and Automation, Guangzhou, China, 30 May–1 June 2007; pp. 3244–3249. [Google Scholar]
- Wu, S.; Xu, D.; Wang, H. Adaptive NLOS Mitigation Location Algorithm in Wireless Cellular Network. Wirel. Pers. Commun. 2015, 84, 1–14. [Google Scholar] [CrossRef]
- Li, X. An Iterative NLOS Mitigation Algorithm for Location Estimation in Sensor Networks. Mob. Wirel. Commun. 2006, 10, 1–5. [Google Scholar]
- Horiba, M.; Okamoto, E.; Shinohara, T. An improved NLOS detection scheme for hybrid-TOA/AOA-based localization in indoor environments. In Proceedings of the 2013 IEEE International Conference on Ultra-Wideband (ICUWB), Sydney, NSW, Australia, 15–18 September 2013; Ieice Technical Report. Volume 113, pp. 37–42. [Google Scholar]
- Horiba, M.; Okamoto, E.; Shinohara, T. An improved NLOS detection scheme using stochastic characteristics for indoor localization. In Proceedings of the 2015 International Conference on Information Networking (ICOIN), Siem Reap, Cambodia, 12–14 January 2015; pp. 478–482. [Google Scholar]
- Zhang, S.J.; Gao, S.C.; Wang, G.; Li, Y.M. Robust NLOS Error Mitigation Method for TOA-Based Localization via Second-Order Cone Relaxation. IEEE Commun. Lett. 2015, 19, 2210–2213. [Google Scholar] [CrossRef]
- Wang, G.; Chen, H.; Li, Y.; Ansari, N. NLOS Error Mitigation for TOA-based Localization via Convex Relaxation. IEEE Trans. Wirel. Commun. 2014, 13, 4119–4131. [Google Scholar] [CrossRef]
- Tomic, S.; Beko, M.; Dinis, R.; Montezuma, P. A Robust Bisection-based Estimator for TOA-based Target Localization in NLOS Environments. IEEE Commun. Lett. 2017, 21, 2488–2491. [Google Scholar] [CrossRef]
- Liu, D.; Xu, Y.; Huang, X. Identification of Location Spoofing in Wireless Sensor Networks in Non-Line-of-Sight Conditions. IEEE Trans. Ind. Inform. 2018, 14, 2375–2384. [Google Scholar] [CrossRef]
- Han, K.; Xing, H.S.; Deng, Z.L.; Du, Y.C. A RSSI/PDR-Based Probabilistic Position Selection Algorithm with NLOS Identification for Indoor Localisation. ISPRS Int. J. Geo-Inf. 2018, 7, 232. [Google Scholar] [CrossRef]
- Benedetto, F.; Giunta, G.; Vandendorpe, L. LOS/NLOS detection by the normalized Rayleigh-ness test. Presented at the 17th European Signal Processing Conference (EUSIPCO), Glasgow, UK, 24–28 August 2009. [Google Scholar]
- Almazrouei, E.; Sindi, N.A.; Al-Araji, S.R. Measurement and analysis of NLOS identification metrics for WLAN systems. In Proceedings of the 2014 IEEE 25th International Symposium on Personal. Indoor and Mobile Radio Communications, Washington, DC, USA, 2–5 September 2014; pp. 280–284. [Google Scholar]
- Xiao, Z.; Wen, H.; Markham, A. Non-Line-of-Sight Identification and Mitigation Using Received Signal Strength. IEEE Trans. Wirel. Commun. 2015, 14, 1689–1702. [Google Scholar] [CrossRef]
- Venkatraman, S.; Caffery, J. Statistical approach to non-line-of-sight BS identification. In Proceedings of the IEEE 5th International Symposium on Wireless Personal Multimedia Communications, Honolulu, HI, USA, 27–30 October 2002; Volume 1, pp. 296–300. [Google Scholar]
- Zhang, J.; Salmi, J.; Lohan, E.S. Analysis of Kurtosis-Based LOS/NLOS Identification Using Indoor MIMO Channel Measurement. IEEE Trans. Veh. Technol. 2013, 62, 2871–2874. [Google Scholar] [CrossRef]
- Xiao, F.; Guo, Z.; Zhu, H. Real-time LOS/NLOS identification with WiFi. In Proceedings of the IEEE International Conference Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–7. [Google Scholar]
- Chen, B.S.; Yang, C.Y.; Liao, F.K.; Liao, J.-F. Mobile location estimator in a rough wireless environment using extended Kalman based IMM and data fusion. IEEE Trans. Veh. Technol. 2009, 58, 1157–1169. [Google Scholar] [CrossRef]
- Li, W.L.; Jia, Y.M.; Du, J.P. TOA-based cooperative localization for mobile stations with NLOS mitigation. J. Frankl. Inst. 2016, 353, 1297–1312. [Google Scholar] [CrossRef]
- Hammes, U.; Zoubir, A.M. Robust MT Tracking Based on M-Estimation and Interacting Multiple Model Algorithm. IEEE Trans. Signal Process. 2011, 59, 3398–3409. [Google Scholar] [CrossRef]
- Hammes, U.; Wolsztynski, E.; Zoubir, A.M. Robust tracking and geolocation for wireless networks in NLOS environments. IEEE J. Sel. Top. Signal Process. 2009, 3, 889–901. [Google Scholar] [CrossRef]
- Kirubarajan, T.; Bar-Shalom, Y. Probabilistic data association techniques for target tracking in clutter. Proc. IEEE. 2004, 92, 536–557. [Google Scholar] [CrossRef]
- Cui, W.; Li, B.; Zhang, L.; Meng, W. Robust Mobile Location Estimation in NLOS Environment Using GMM, IMM, and EKF. IEEE Syst. J. 2019, 13, 3490–3500. [Google Scholar] [CrossRef]
- Hammes, U.; Zoubir, A.M. Robust mobile terminal tracking in NLOS environments based on data association. IEEE Trans. Signal Process. 2010, 51, 5872–5882. [Google Scholar] [CrossRef]
- Kim, D.H.; Kwon, G.R.; Pyun, J.Y. NLOS Identification in UWB channel for Indoor Positioning. Presented at the 15th IEEE Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 12–15 January 2018. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Default Values |
|---|---|---|
| The number of beacon nodes | 6 | |
| NLOS error probability | 0.5 | |
| The measurements’ noise | ||
| The NLOS errors |
| Parameter | Symbol | Default Values |
|---|---|---|
| The number of beacon nodes | 6 | |
| The NLOS error probability | 0.5 | |
| The measurements’ noise | ||
| The NLOS errors |
| Parameter | Symbol | Default Values |
|---|---|---|
| The number of beacon nodes | M | 6 |
| The NLOS error probability | 0.5 | |
| The measurements noise | ||
| The NLOS errors | E(λ) | E(8) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, L.; Xue, M.; Liu, Z.; Wang, Y. A Robust Tracking Algorithm Based on a Probability Data Association for a Wireless Sensor Network. Appl. Sci. 2020, 10, 6. https://doi.org/10.3390/app10010006
Cheng L, Xue M, Liu Z, Wang Y. A Robust Tracking Algorithm Based on a Probability Data Association for a Wireless Sensor Network. Applied Sciences. 2020; 10(1):6. https://doi.org/10.3390/app10010006
Chicago/Turabian StyleCheng, Long, Mingkun Xue, Ze Liu, and Yong Wang. 2020. "A Robust Tracking Algorithm Based on a Probability Data Association for a Wireless Sensor Network" Applied Sciences 10, no. 1: 6. https://doi.org/10.3390/app10010006
APA StyleCheng, L., Xue, M., Liu, Z., & Wang, Y. (2020). A Robust Tracking Algorithm Based on a Probability Data Association for a Wireless Sensor Network. Applied Sciences, 10(1), 6. https://doi.org/10.3390/app10010006