Full-Scale Train Derailment Testing and Analysis of Post-Derailment Behavior of Casting Bogie



Abstract
1. Introduction
2. Experimental Methodologies
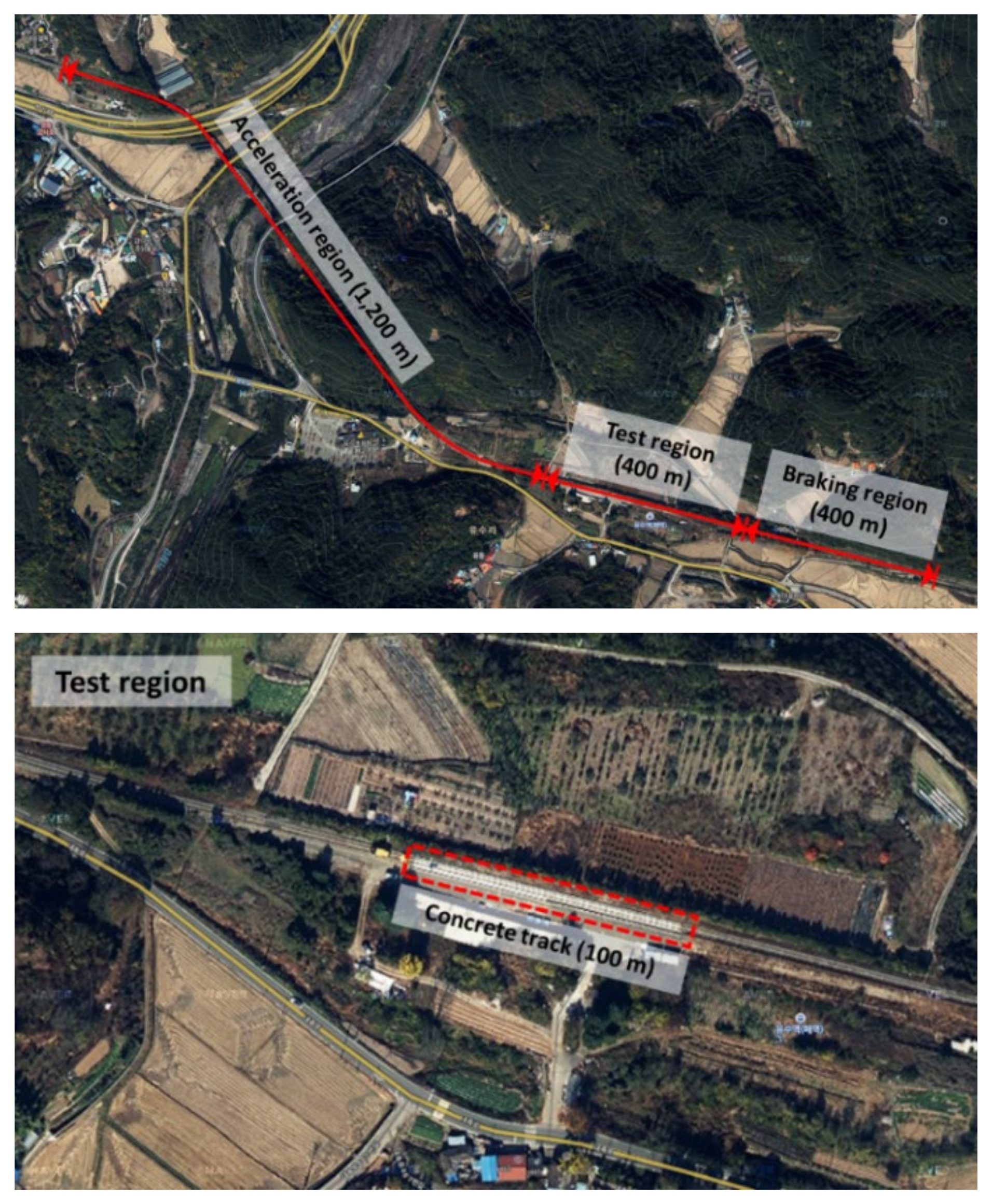
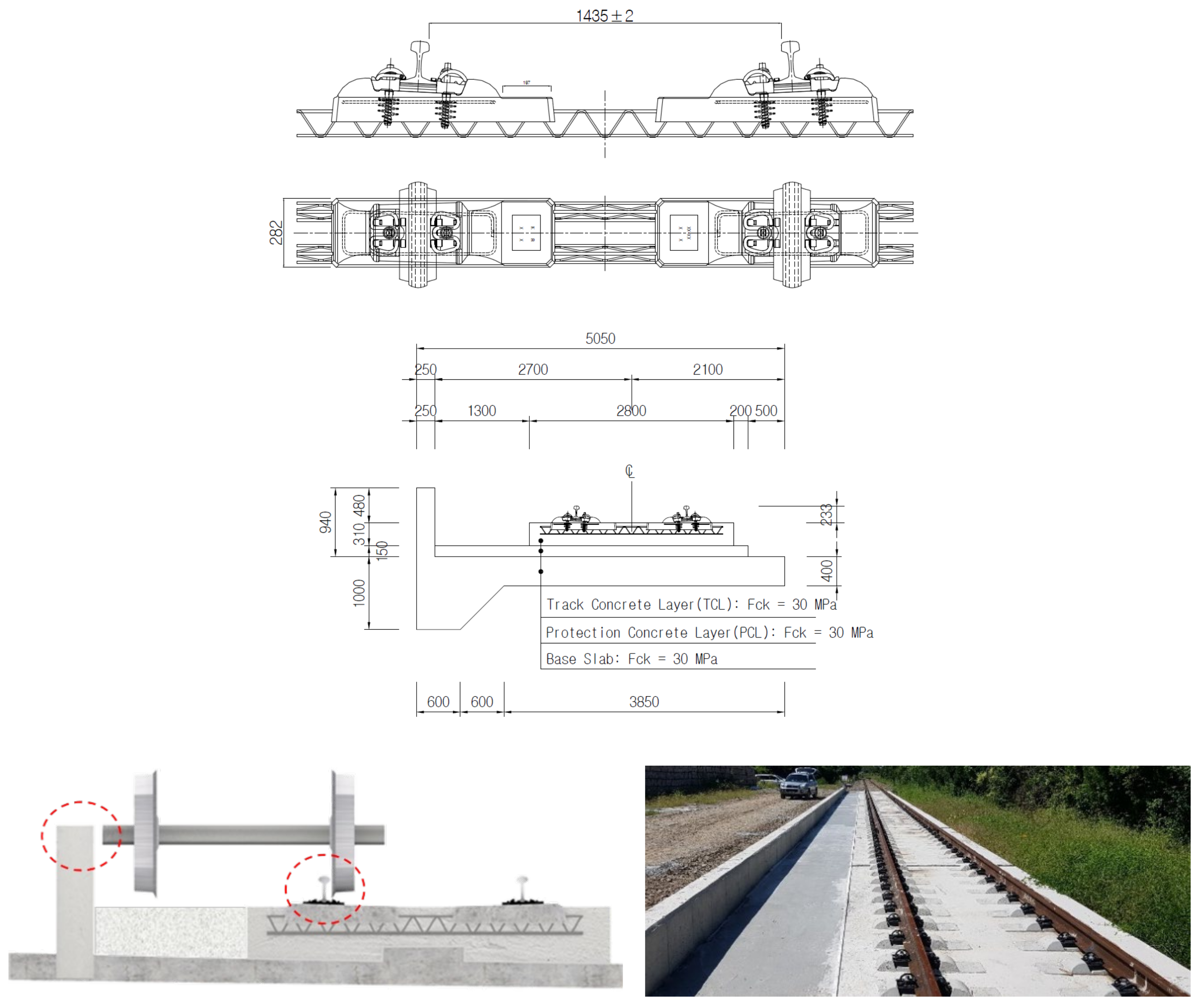
2.1. Test Site and Track
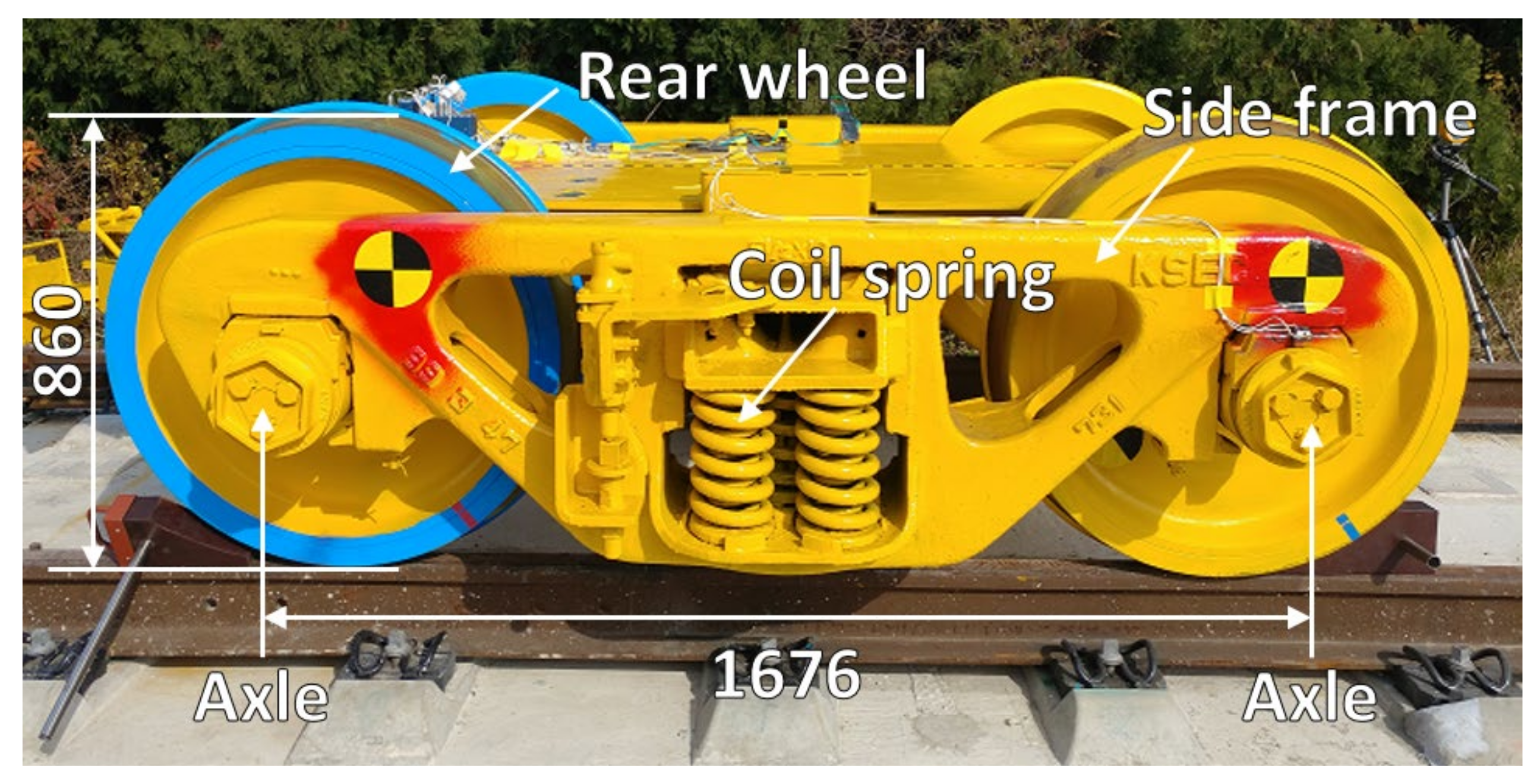
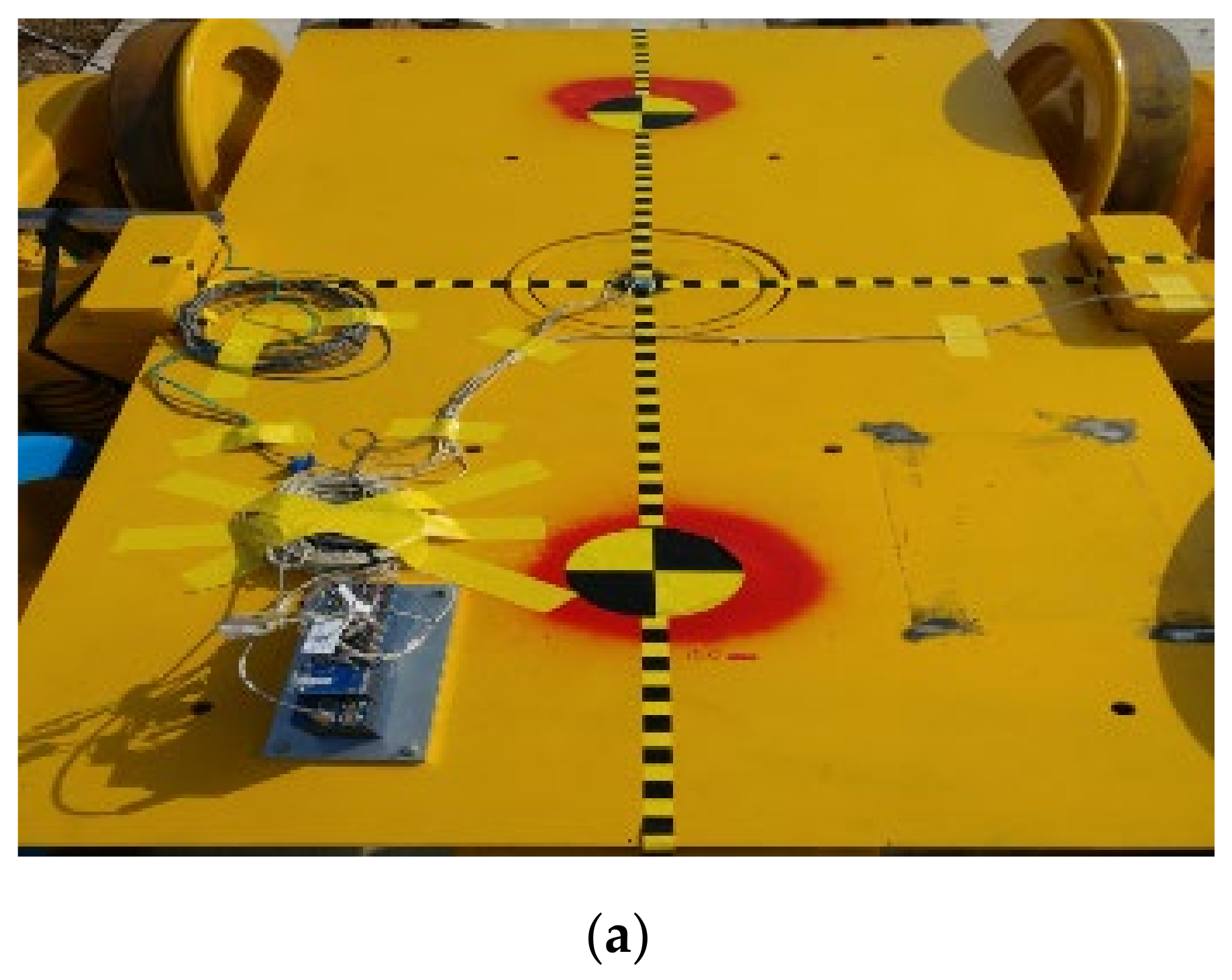
2.2. Test Bogie and Acceleration Method
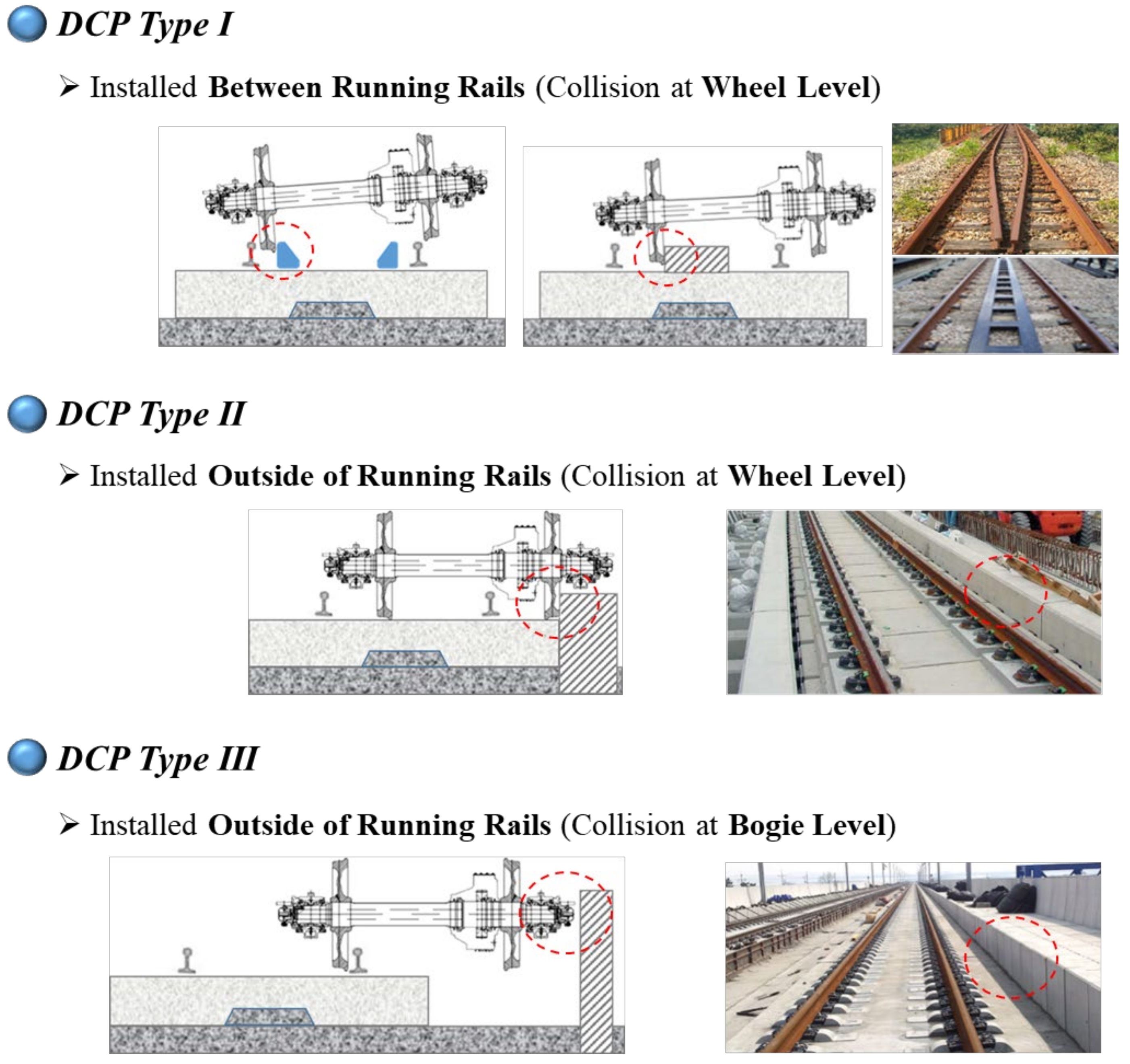
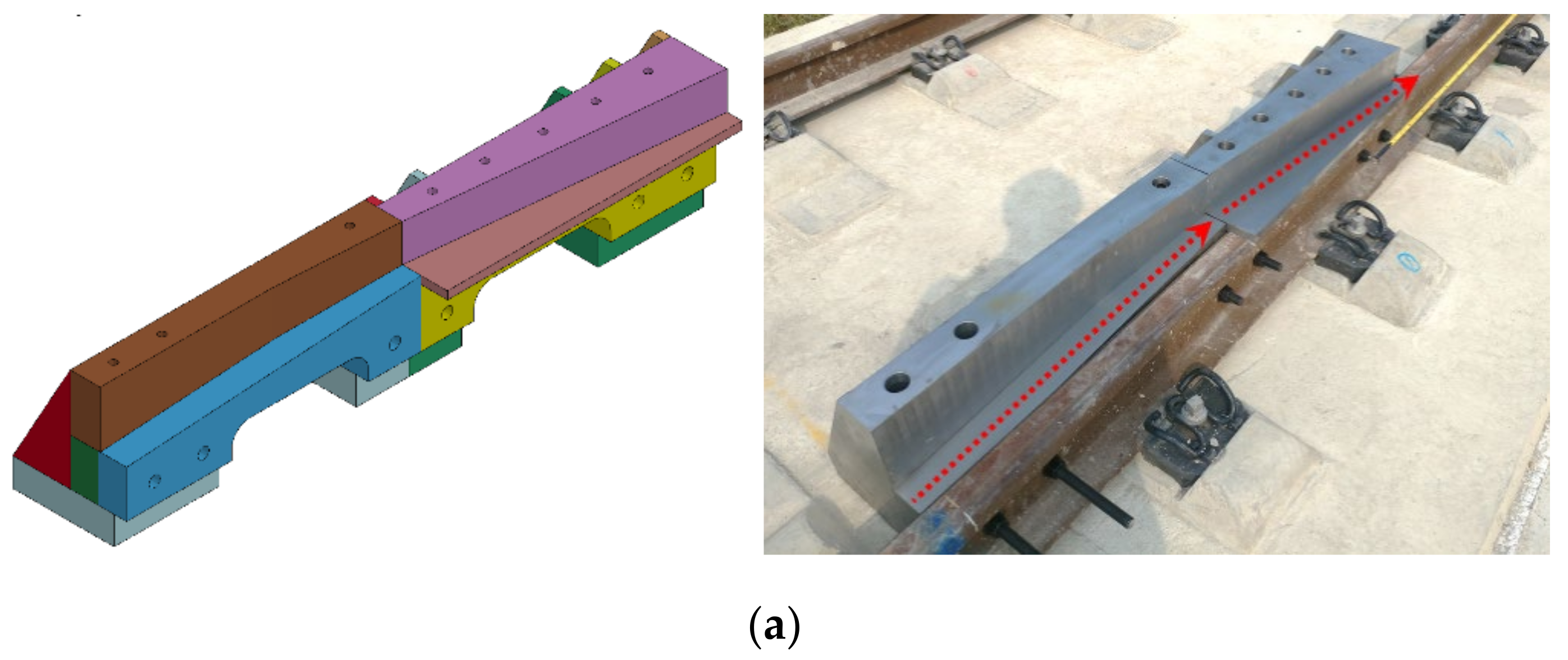
2.3. Derailment Device
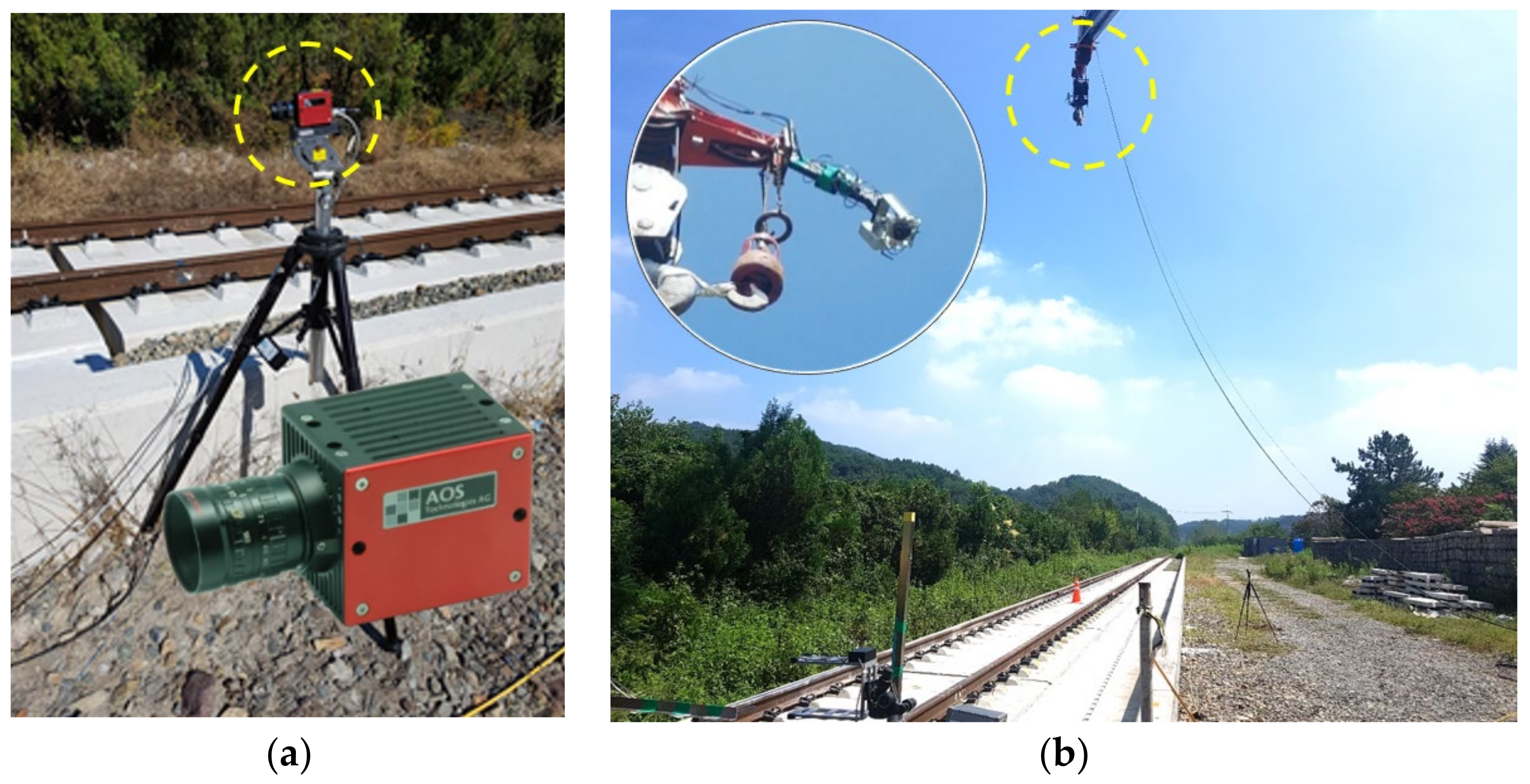
2.4. Data Acquisition System
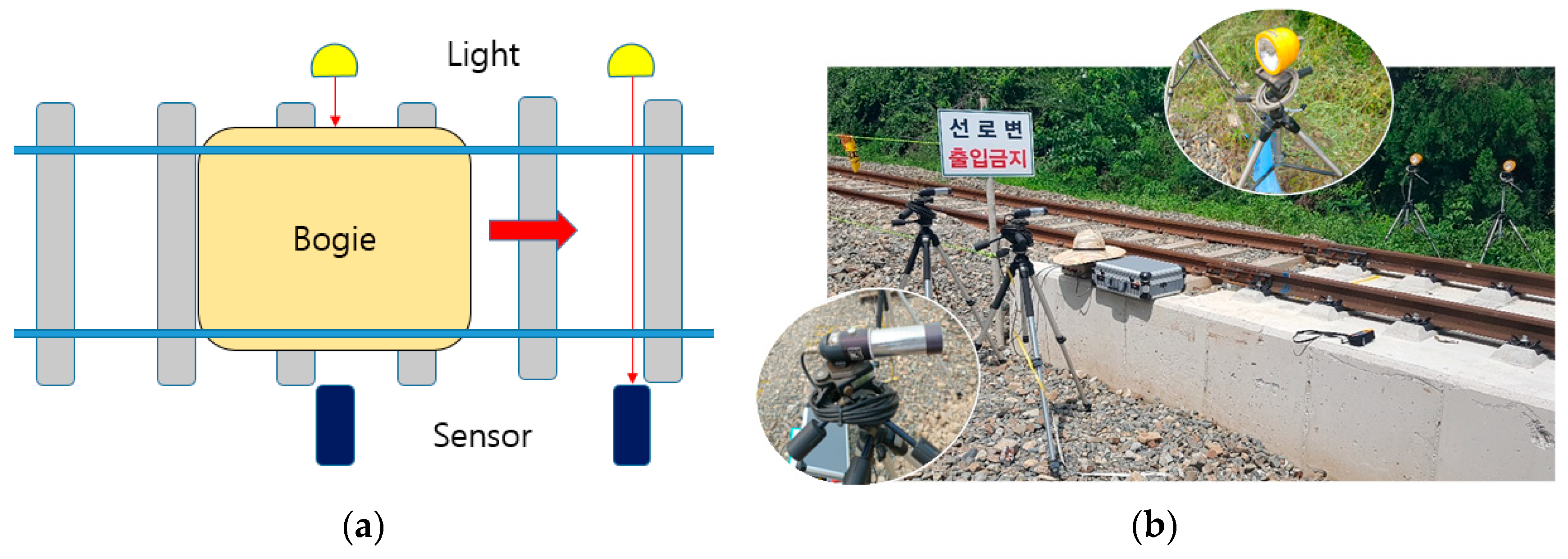
2.5. Simultaneous Trigger System
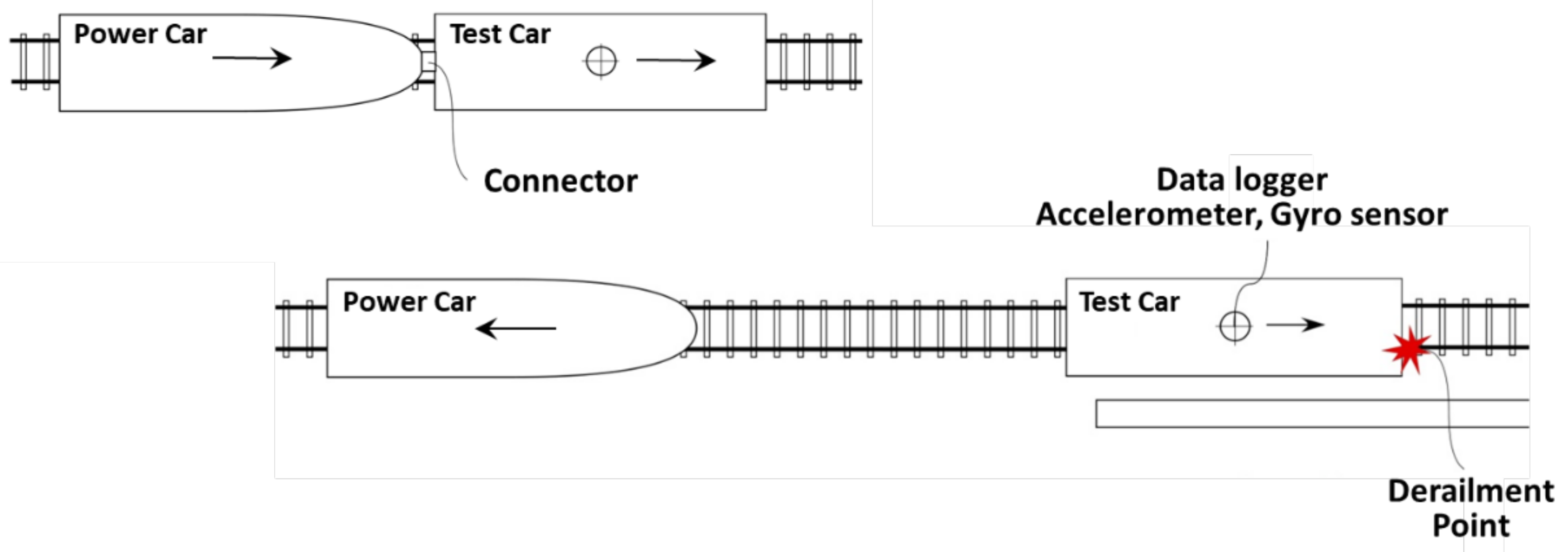
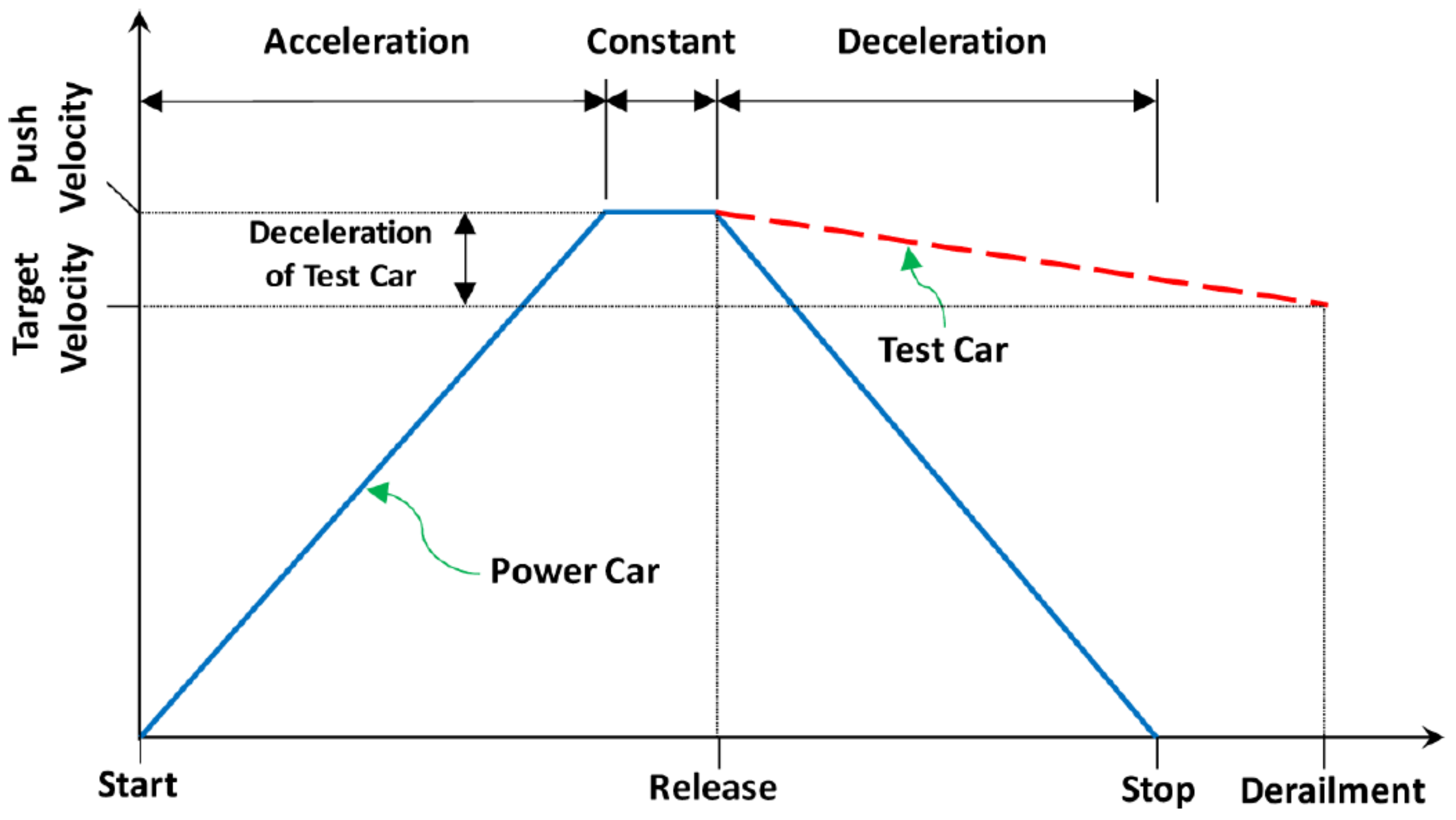
2.6. Running Diagram of the Power Car and Test Bogie
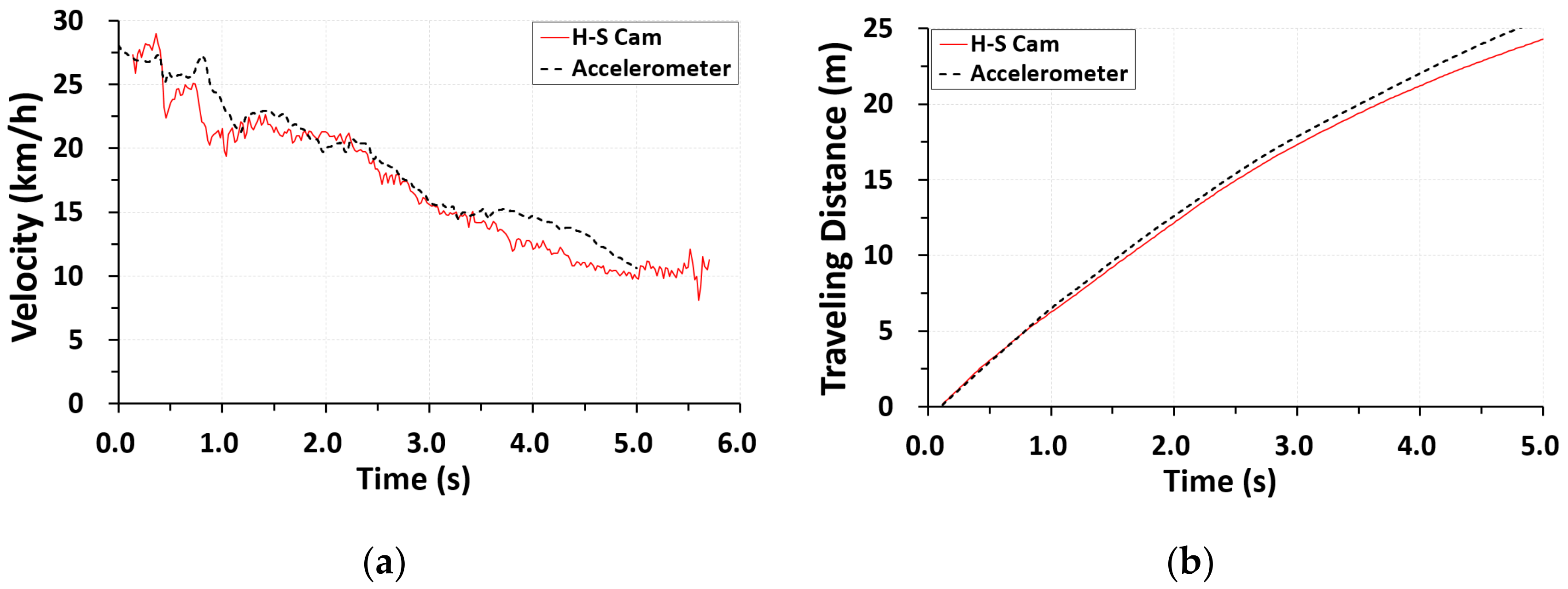
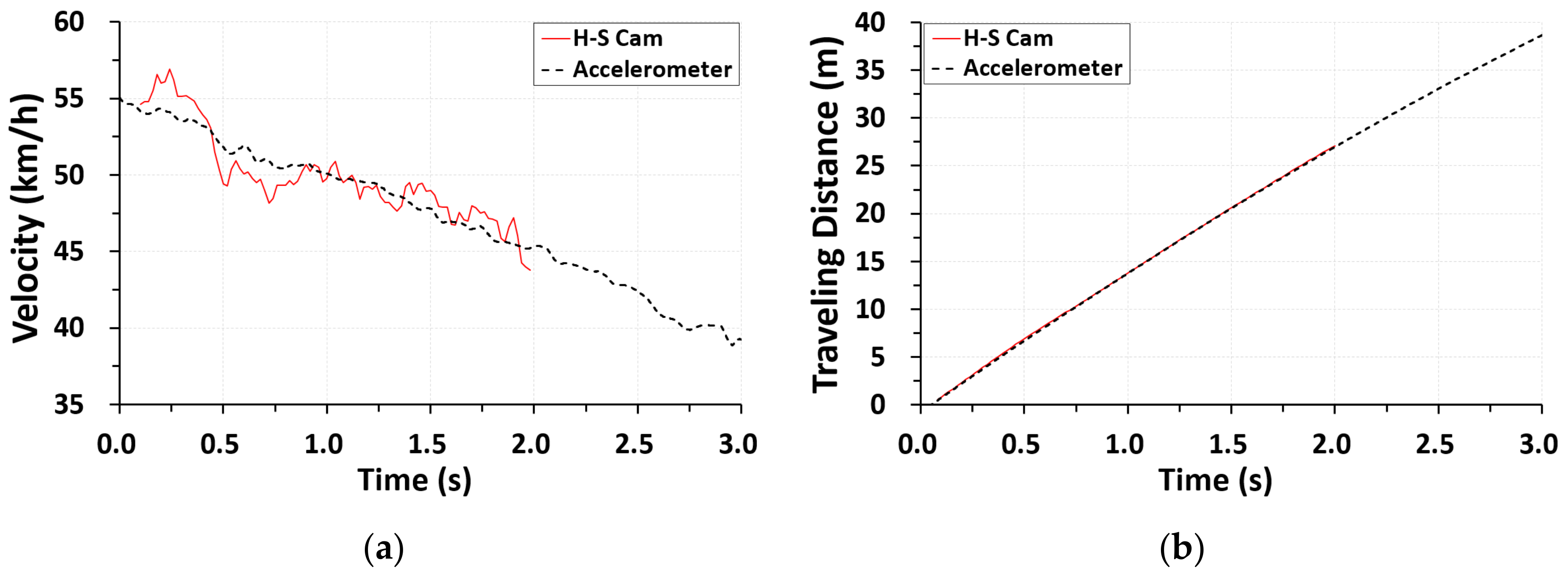
2.7. Post-Processing of Data
3. Experimental Results
3.1. Test Cases
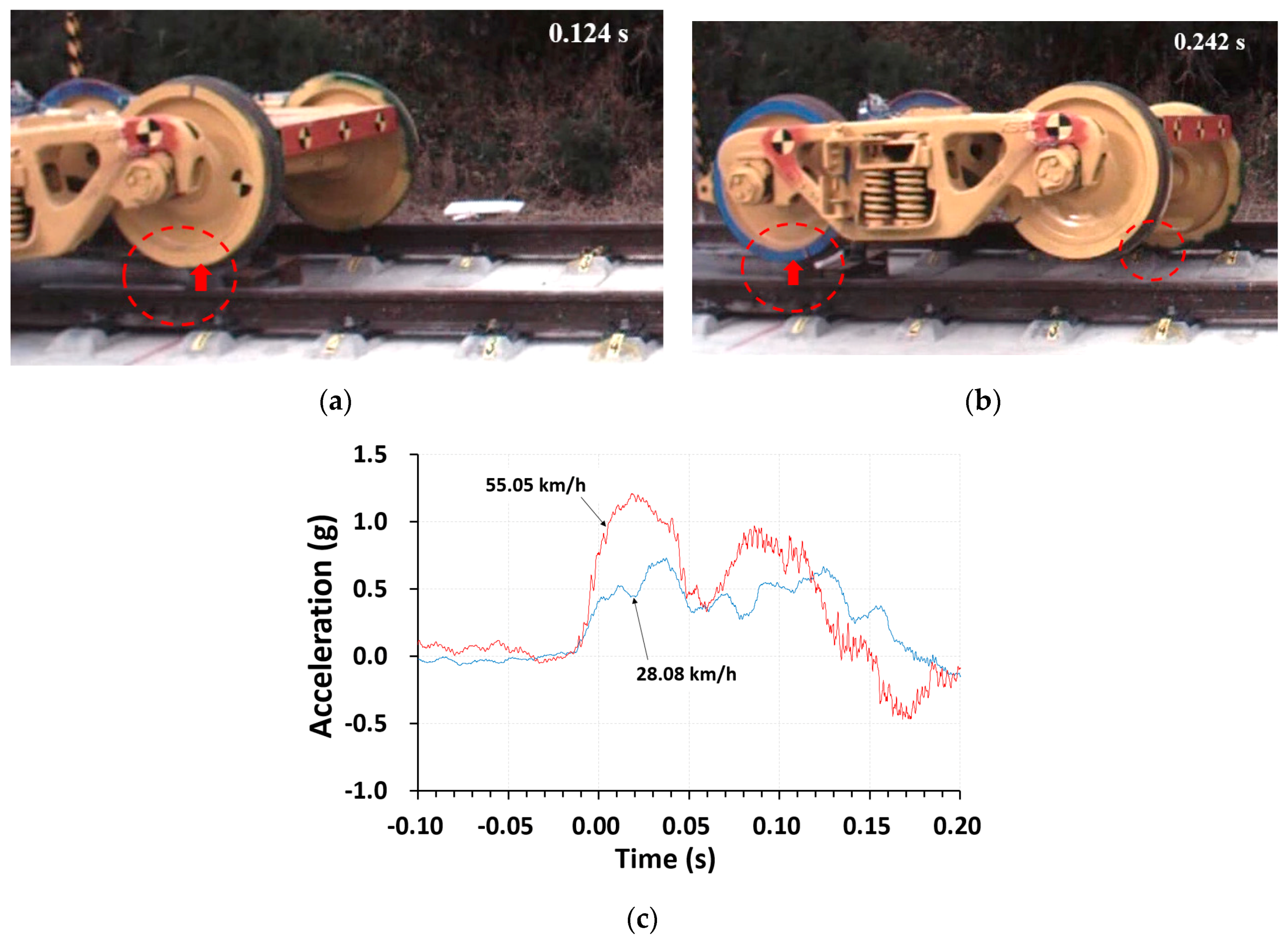
3.2. Case #1 (Derailment Velocity of 28.08 km/h)
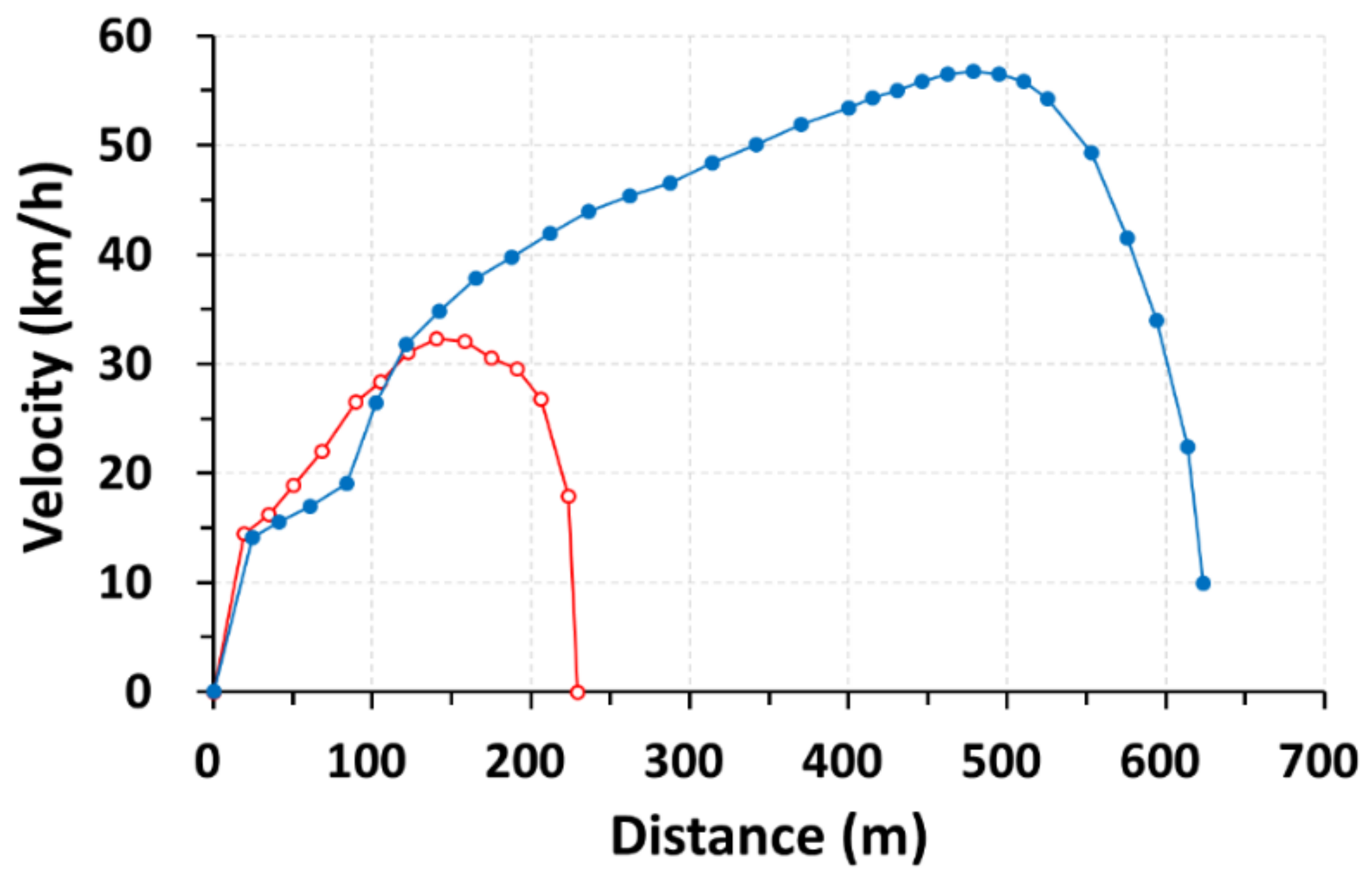
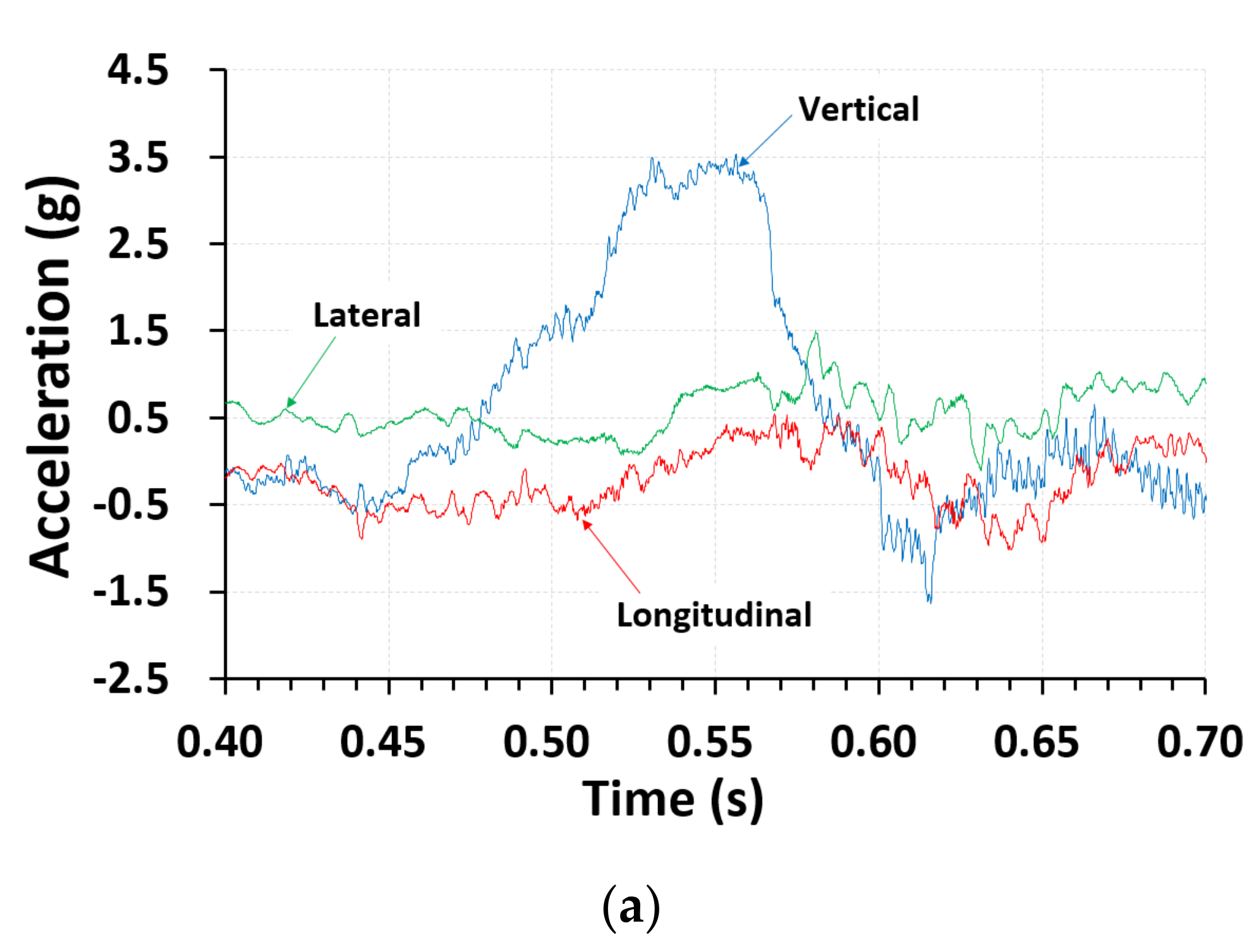
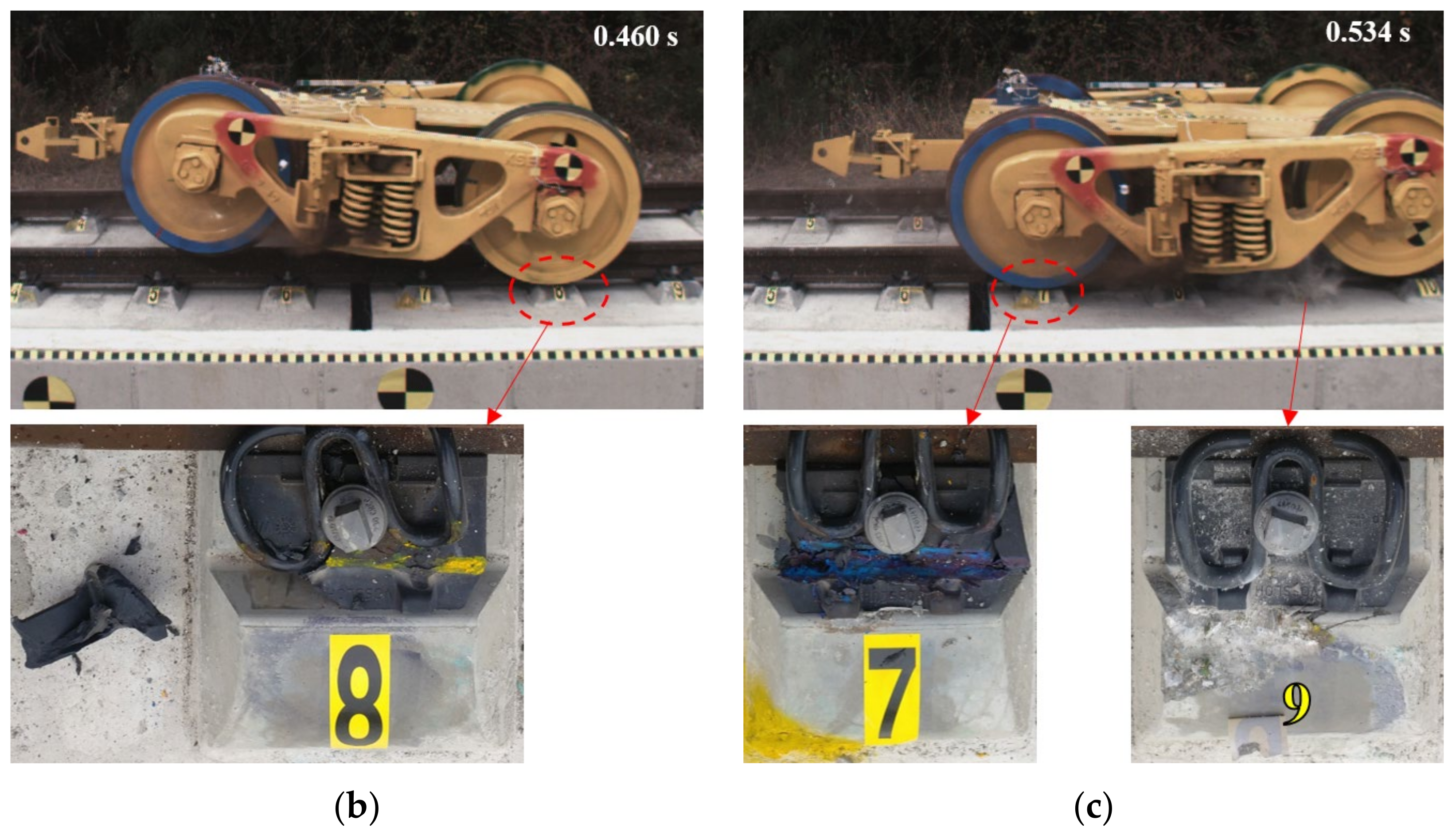
3.3. Case #2 (Derailment Velocity of 55.05 km/h)
4. Conclusions
- Train bogie derailment tests can be successfully conducted by using the methodologies proposed in this study. A push system and automatic release device for the test bogie were proposed. Also, a derailment device to induce wheel-climbing derailment and a simultaneous trigger system to synchronize different pieces of equipment were suggested. The proposed methodologies may be applicable to other types of full-scale derailment tests.
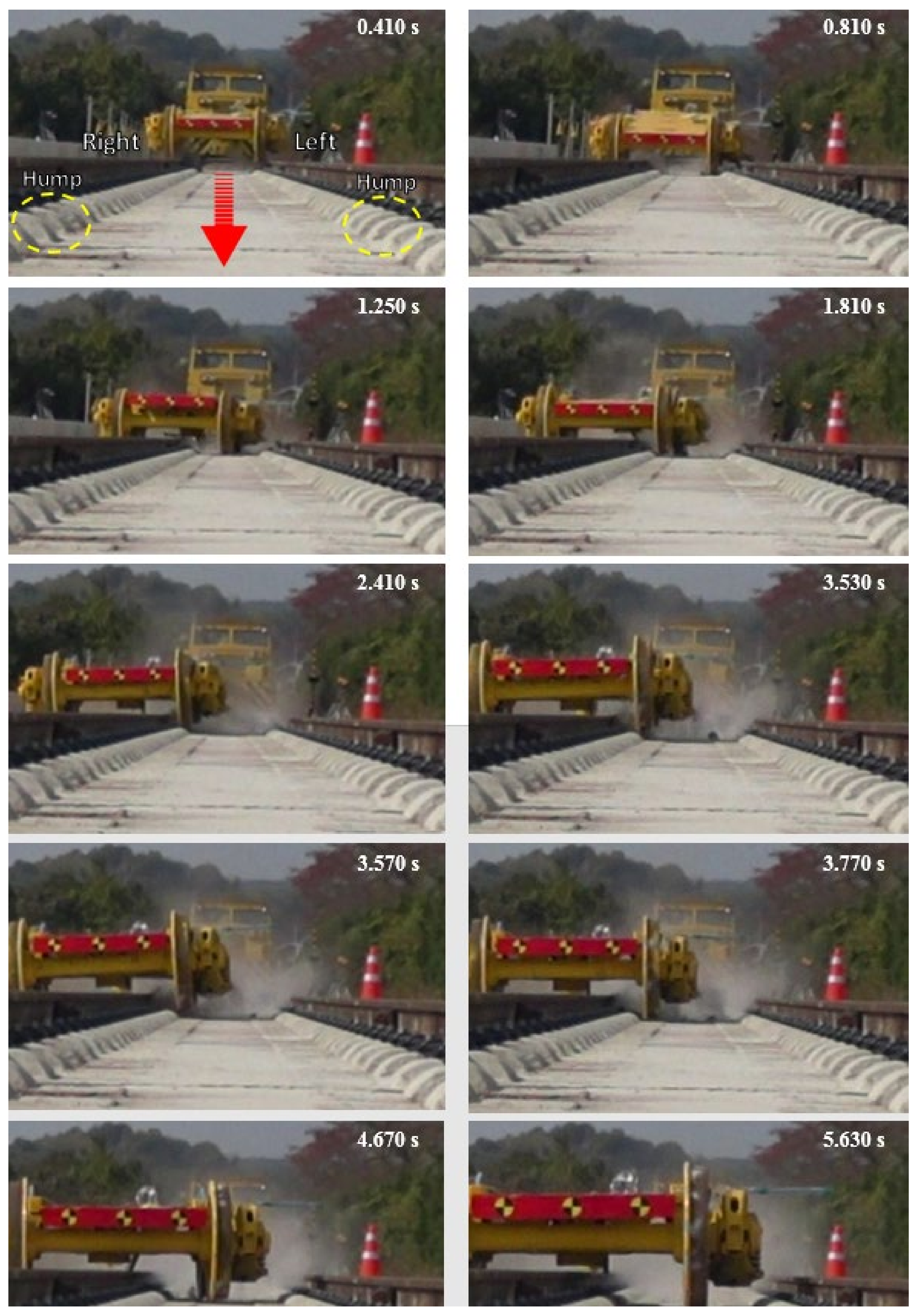
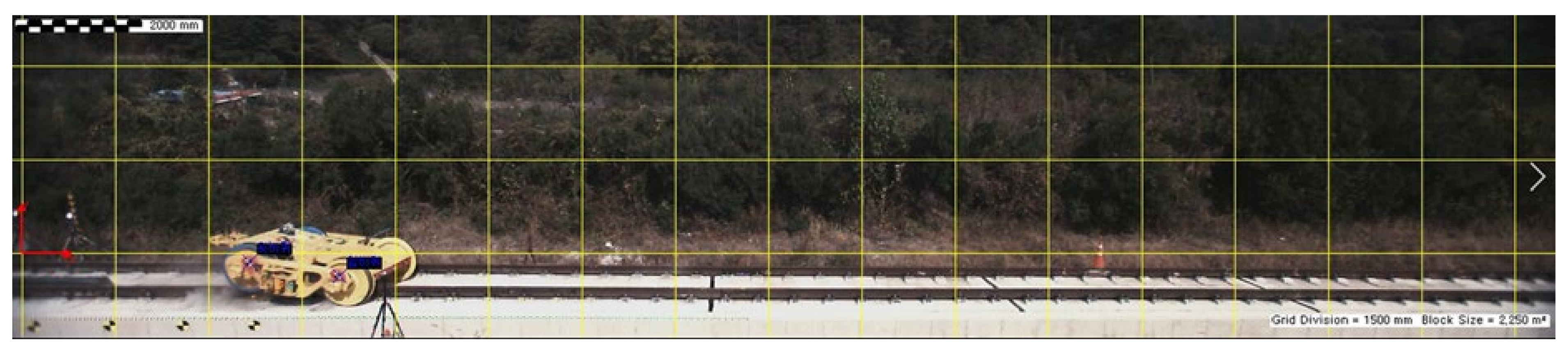
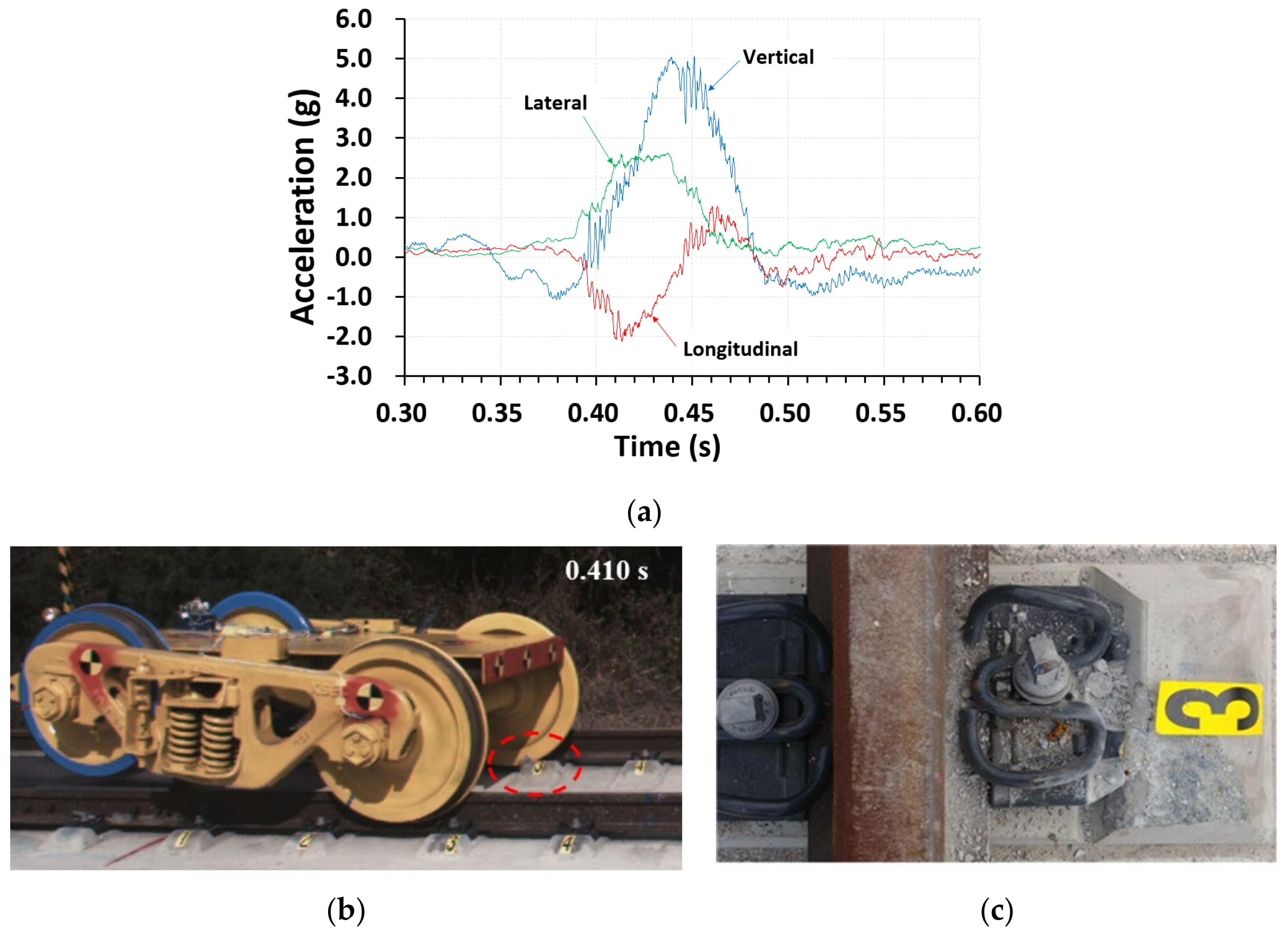
- For the test in Case #1 (derailment velocity of 28.08 km/h), the derailed bogie ran the track with significant right (direction of derailment) lateral movement, and the left (opposite direction to derailment) wheel continuously came into contact with the hump of the concrete track. Then, the bogie moved to the left without contact between the right rail and left wheel. This indicates that the lateral movement for Case #1 was controlled by the humps, and the humps in this track significantly affected the post-derailment behavior of the derailed bogie. In Case #1, the maximum vertical acceleration was approximately 5.57 g at the second impact with the hump. The maximum lateral acceleration was approximately 2.62 g at the first impact with the hump.
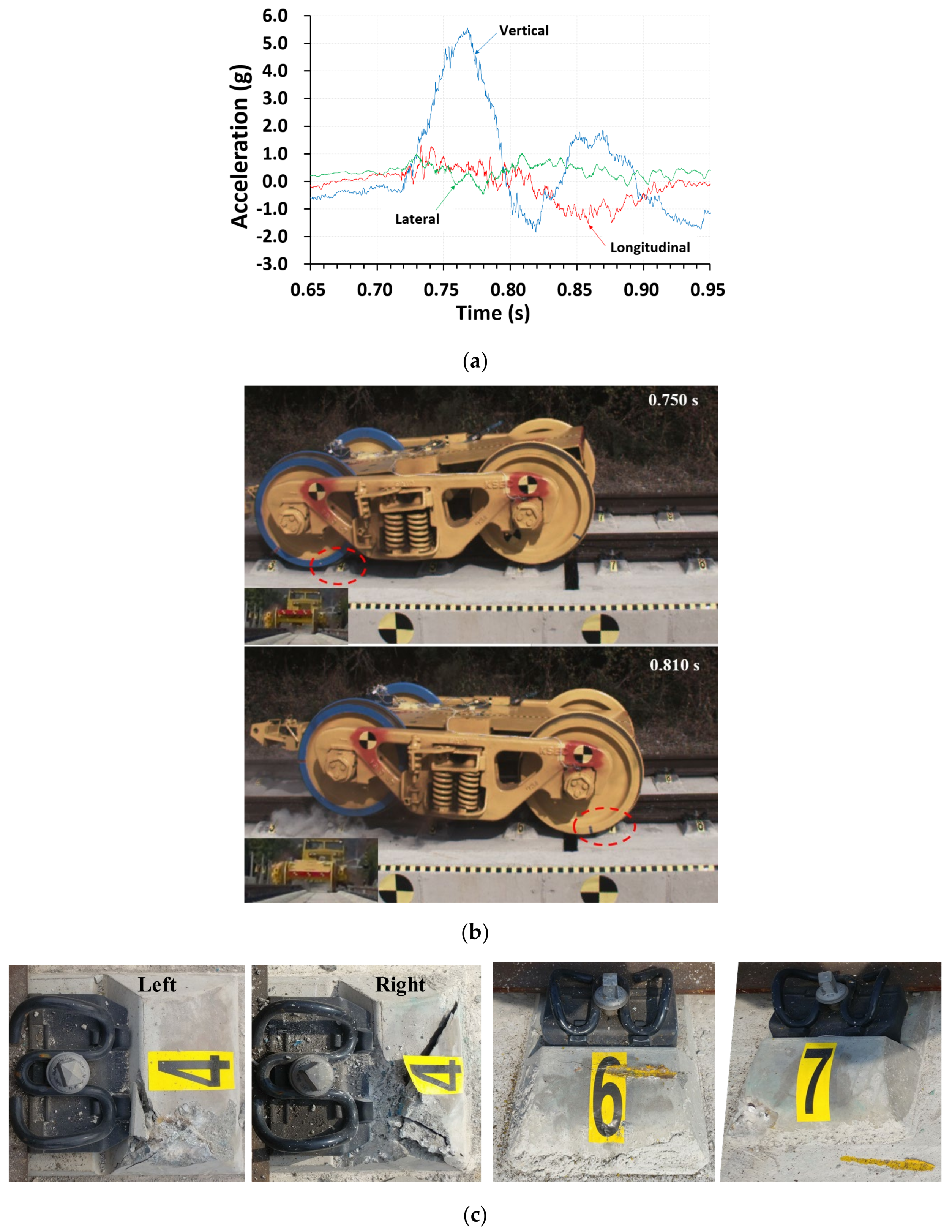
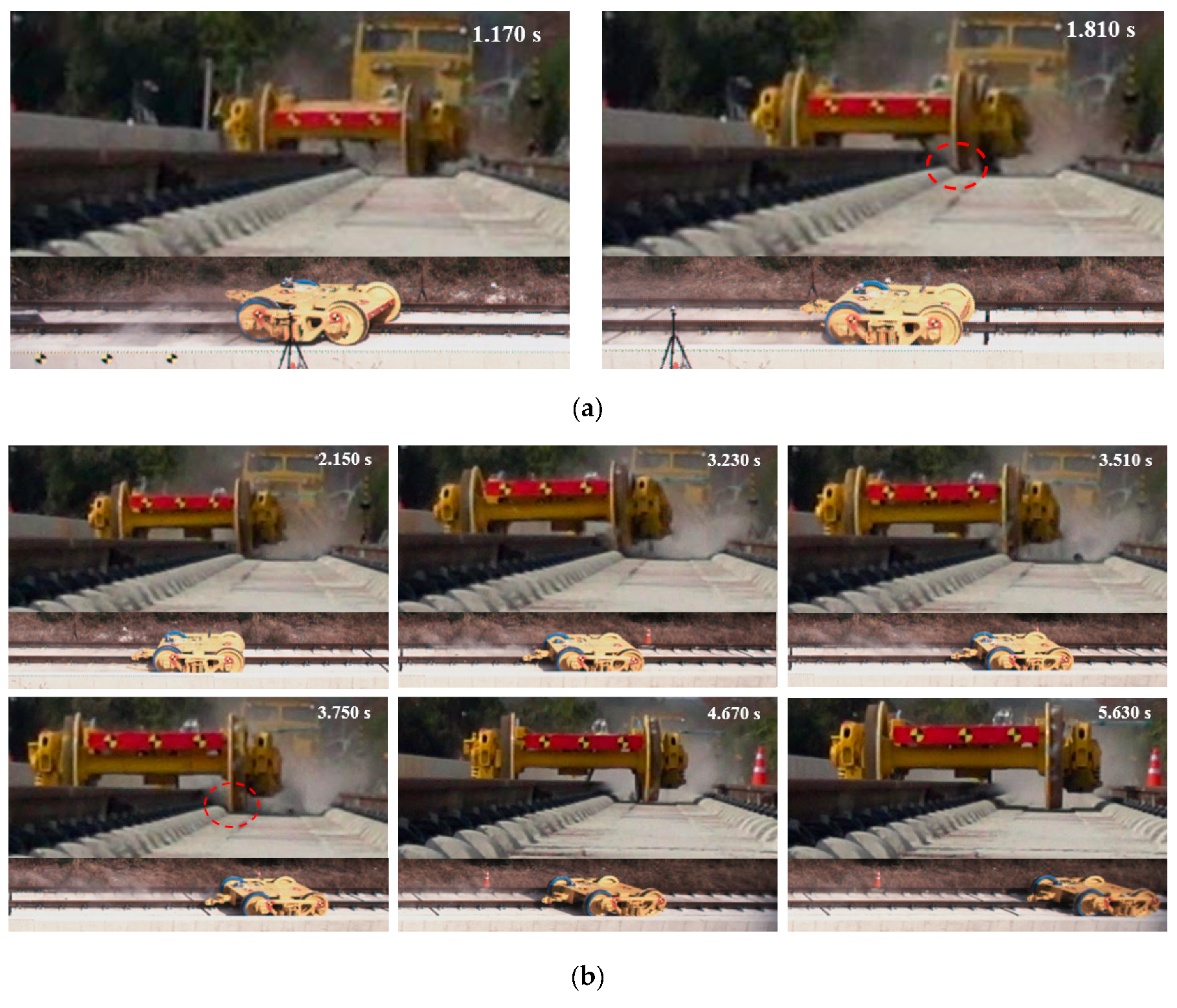
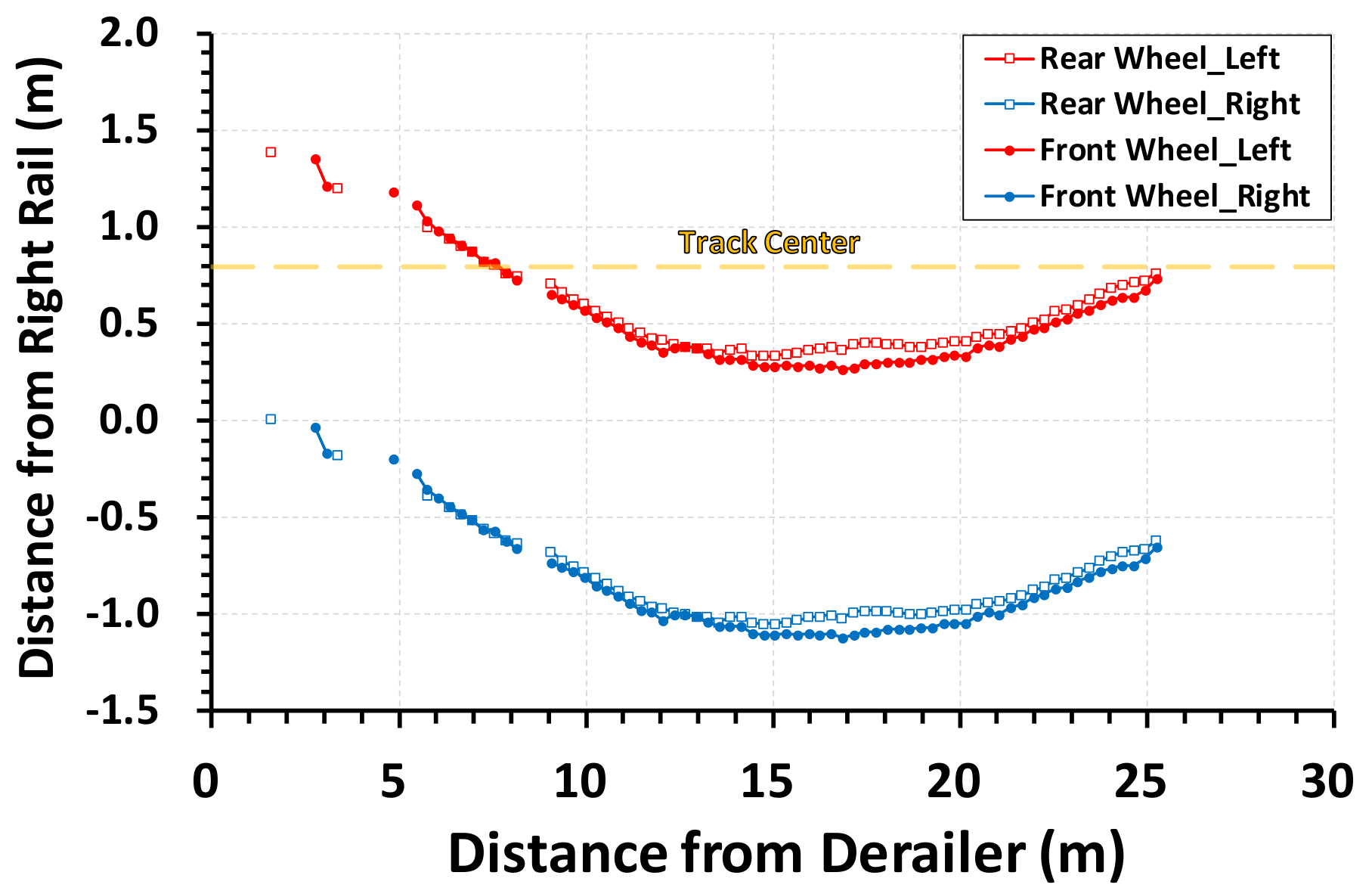
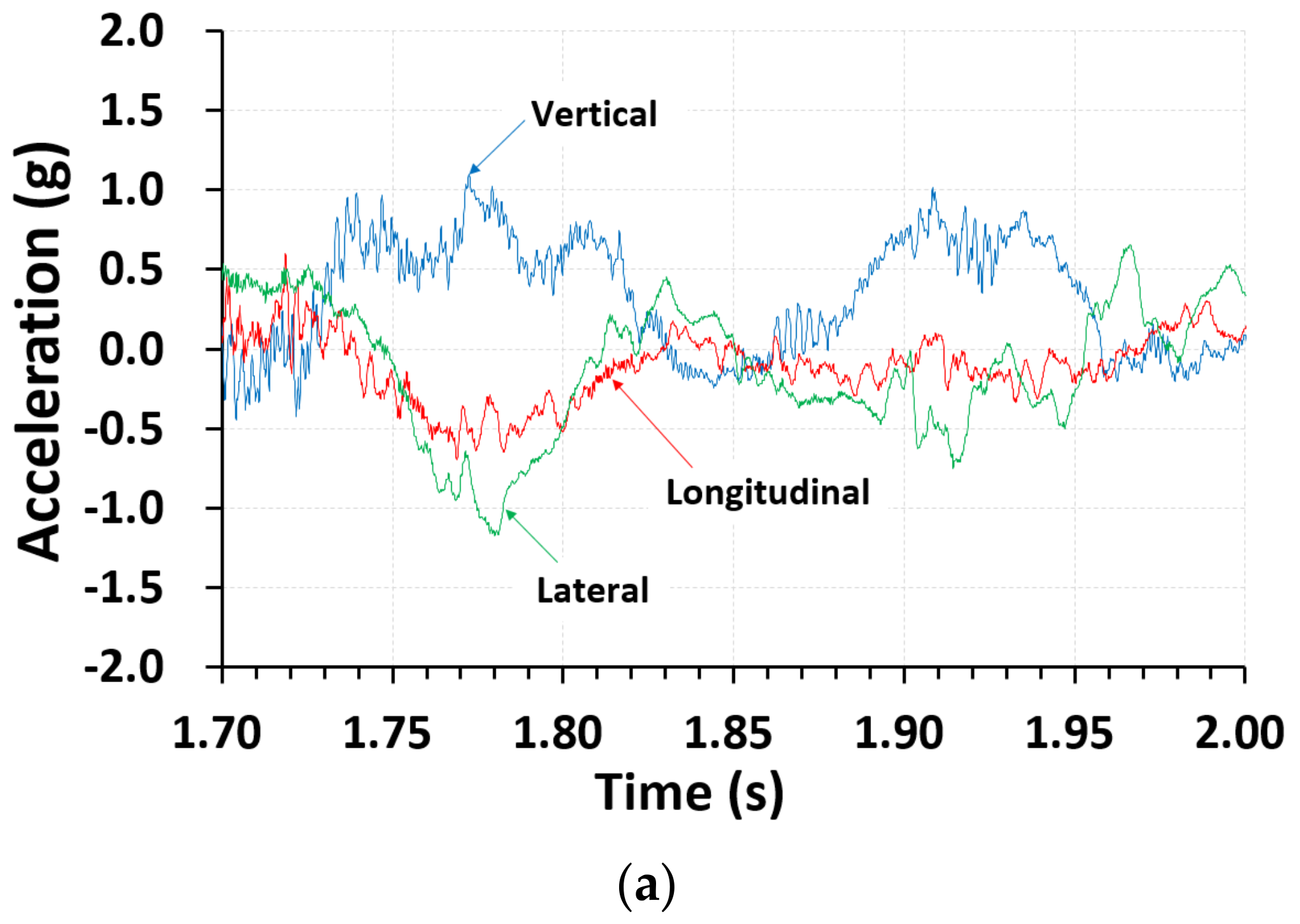
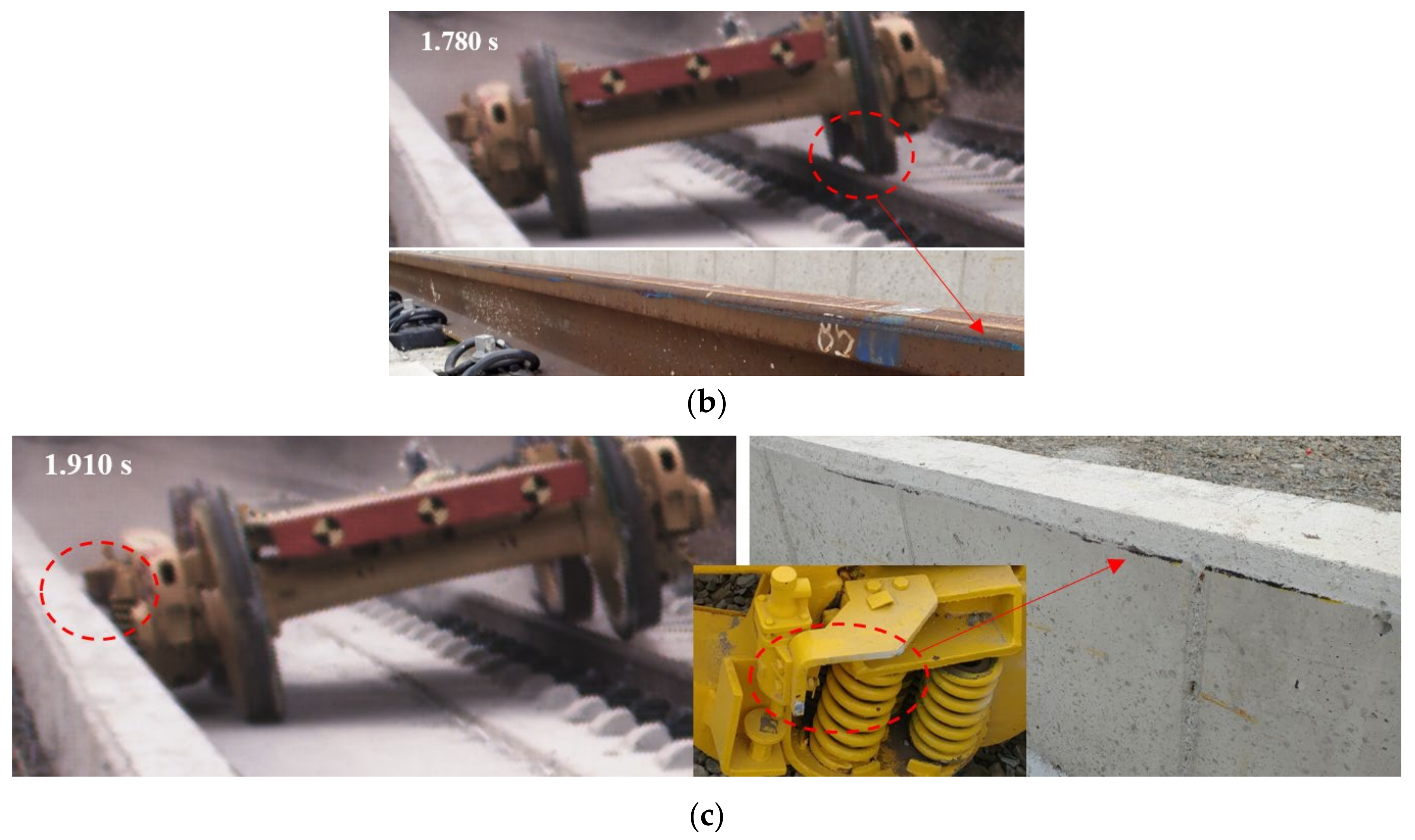
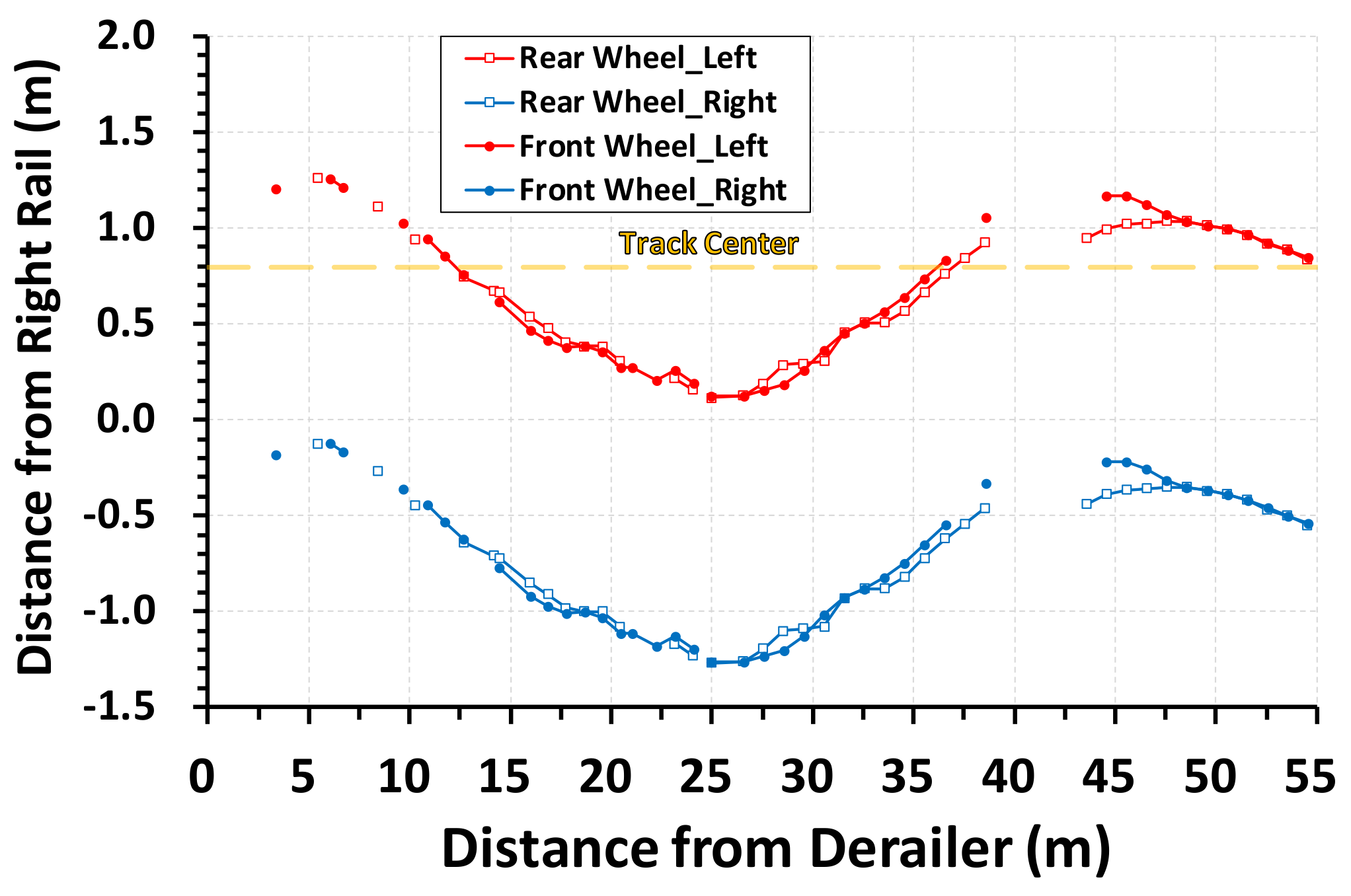
- For the test in Case #2 (derailment velocity of 55.05 km/h), the maximum vertical impact to the track was observed at 0.460–0.560 s, and the maximum vertical acceleration was approximately 3.53 g. The test bogie ran the track with considerable lateral movement, similar to Case #1. However, in Case #2, the wheel flange came into contact with the rail, and then the test bogie impacted the containment wall. The lateral acceleration values were approximately 1.17 g and 0.75 g for the rail and containment wall impacts, respectively. Thus, it was found that the impact force on the containment wall was reduced by approximately 36% by the first guide by the rail. Finally, the test bogie returned to the track center direction after containment wall impact.
Author Contributions
Funding
Conflicts of Interest
References
- Korea Transportation Safety Authority. Railway Accident and Safety Performance Analysis Report; Korea Ministry of Land, Infrastructure, and Transport, ASPR (Annual Safety Performance Report); Korea Transportation Safety Authority: Ansan-si, Korea, 2017.
- Bae, H.U. Advanced Design Concept of Derailment Containment Provisions Using Collision Simulation after Train Derailment. Ph.D. Thesis, Chungnam National University, Daejeon, Korea, 2015. [Google Scholar]
- Bae, H.U.; Yun, K.M.; Lim, N.H. Containment capacity and crashworthiness estimation of derailment containment wall on high-speed train. Proc. Inst. Mech. Eng. Part F 2018, 232, 680–696. [Google Scholar] [CrossRef]
- Bae, H.U.; Yun, K.M.; Moon, J.; Lim, N.H. Impact force evaluation of the derailment containment wall for high-speed train through a collision simulation. Adv. Civ. Eng. 2018. [Google Scholar] [CrossRef]
- Korea Legal Information Center. Railroad Safety Act; Korea Ministry of Government Legislation: Sejong, Korea, 2018; p. 15404.
- Korea Rail Network Authority. Track Maintenance Guidelines; Korea Rail Network Authority: Daejeon, Korea, 2016. [Google Scholar]
- Korea Rail Network Authority. Railway Design Guideline and Handbook—Subsidiary and Safety Facilities for Main Lined; KR C-02060; Korea Rail Network Authority: Daejeon, Korea, 2017. [Google Scholar]
- Booz, A. Hamilton Report on the Findings of: Current Practice and Effectiveness of Derailment Containment Provisions on High Speed Lines; HSL-Zuid Organisation: Zoetermeer, The Netherlands, 2004. [Google Scholar]
- Brabie, D. Wheel-sleeper impact model in rail vehicles analysis. J. Syst. Des. Dyn. 2007, 1, 468–480. [Google Scholar] [CrossRef]
- Brabie, D.; Andersson, E. High-speed train derailments—Minimizing consequences through Innovative design. In Proceedings of the 8th World Congress of Railway Research (WCRR 2008), Seoul, Korea, 19–21 May 2008; Union Internationale Des Chemins De Fer (UIC): Paris, France, 2008. [Google Scholar]
- Wu, X.; Chi, M.; Gao, H. Post-derailment dynamic behavior of a high-speed train under earthquake excitations. Eng. Fail. Anal. 2016, 64, 97–110. [Google Scholar] [CrossRef]
- Wu, X.; Chi, M.; Gao, H.; Ke, X.; Zeng, J.; Wu, P.; Zhu, M. Post-derailment dynamic behavior of railway vehicles travelling on a railway bridge during earthquake. Proc. Inst. Mech. Eng. Part F 2016, 230, 418–439. [Google Scholar] [CrossRef]
- Wu, X.; Chi, M.; Gao, H.; Zhang, D.; Zeng, J.; Wu, P.; Zhu, M. The study of post-derailment measures to limit the extent of a derailment. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2016, 230, 64–76. [Google Scholar] [CrossRef]
- Wu, X.; Chi, M.; Gao, H. The study of post-derailment dynamic behavior of railway vehicle based on running tests. Eng. Fail. Anal. 2014, 44, 382–399. [Google Scholar] [CrossRef]
- Han, H.H.; Kim, J.W.; Song, I.H.; Bae, H.U.; Koo, J.S.; Lim, N.H. Study on derailment test of bogie using fixed derailer. J. Korean Soc. Railw. 2018, 21, 957–968. [Google Scholar] [CrossRef]
- Chiara, B.; Enrico, B.; Matteo, I.; Salvatore, N. Prototyping and Validation of MEMS Accelerometers for Structural Health Monitoring—The Case Study of the Pietratagliata Cable-Stayed Bridge. J. Sens. Actuator Netw. 2018, 7, 30. [Google Scholar]
- Kim, D.S. Design of Roadside Safety Features Using Vehicle Velocity-Time History. Ph.D. Thesis, Kongju National University, Gongju, Korea, 2012. [Google Scholar]
- Kim, K.J. Evaluation of Collision Force by Impact Simulations and Its Application to the Design of Bridge Piers. Ph.D. Thesis, Kongju National University, Gongju, Korea, 2014. [Google Scholar]
- Beason, W.L.; Hirsch, T.J.; Campise, W.L. Measurement of Heavy Vehicle Impact Forces and Inertia Properties; Final Report, FHWA/RD-89/120; Texas Transportation Institute: College Station, TX, USA, 1989.
- Chiara, B.; Marco, F.; Claudio, A. Vibration Analysis and Dynamic Characterization of Structural Glass Elements with Different Restraints Based on Operational Modal Analysis. Buildings 2019, 9, 13. [Google Scholar]
- Railtrack PLC (Safety & Standards Directorate). Recommendations for the Design of Bridges; Railtrack Approved Code of Practice, GC/RC5110; Railtrack PLC: London, UK, 2000. [Google Scholar]
- Network Rail. Design of Bridges (Design Loading for Accommodation and Occupation Overbridges); Network Rail Kings Place, NR/L3/CIV/020; Network Rail: London, UK, 2011. [Google Scholar]

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classification | Specification |
|---|---|
| Frame structure | 3-piece cast steel |
| Fixed wheel base | 1676 mm |
| Wheel diameter | 860 mm |
| Suspension system | Coil spring between bolster and side frame |
| Friction device | Friction wedge between bolster and side frame |
| Bearing | AAR D class tapered roller bearings |
| Test weight | 40.91 kN (4.17 tonf) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bae, H.-U.; Moon, J.; Lim, S.-J.; Park, J.-C.; Lim, N.-H. Full-Scale Train Derailment Testing and Analysis of Post-Derailment Behavior of Casting Bogie. Appl. Sci. 2020, 10, 59. https://doi.org/10.3390/app10010059
Bae H-U, Moon J, Lim S-J, Park J-C, Lim N-H. Full-Scale Train Derailment Testing and Analysis of Post-Derailment Behavior of Casting Bogie. Applied Sciences. 2020; 10(1):59. https://doi.org/10.3390/app10010059
Chicago/Turabian StyleBae, Hyun-Ung, Jiho Moon, Seung-Jae Lim, Jong-Chan Park, and Nam-Hyoung Lim. 2020. "Full-Scale Train Derailment Testing and Analysis of Post-Derailment Behavior of Casting Bogie" Applied Sciences 10, no. 1: 59. https://doi.org/10.3390/app10010059
APA StyleBae, H.-U., Moon, J., Lim, S.-J., Park, J.-C., & Lim, N.-H. (2020). Full-Scale Train Derailment Testing and Analysis of Post-Derailment Behavior of Casting Bogie. Applied Sciences, 10(1), 59. https://doi.org/10.3390/app10010059