

The Use of Satellite Synthetic Aperture Radar Imagery to Assist in the Monitoring of the Time Evolution of Challenging Coastal Environments: A Case Study of the Basilicata Coast
 ,
,  ,
,  , ,
, ,  , and
, and
Abstract
:1. Introduction
2. Methodologies
2.1. Processing of SAR Measurements
- Pre-processing: This includes polarimetric calibration, multi-looking to reduce the speckle noise using an N × N boxcar window and geo-coding. In this study, N = 9 is used since it represents a good compromise between speckle reduction and preservation of spatial details.
- Feature extraction: This is a key step in coastline extraction that relies on the enhancement of the land/sea contrast. This is very important to make the subsequent steps more robust and effective. This means that a metric that increases land/sea separation in a broad range of sea state conditions and incidence angles is to be selected. In this study, the combination of co- and cross-polarized scattering amplitudes is selected:
- Binary image generation: A binary image, i.e., an image where land and sea are distinguished, is generated using a constant false alarm rate (CFAR) global threshold method [21]. The CFAR algorithm separates land from sea pixels according to the decision rule that consists of comparing r with a threshold. In this study, the statistical distribution of r over a clutter area, i.e., an area belonging to the sea surface, is found to be well approximated by a Burr probability density function (pdf); hence, the threshold η can be set as a function of the probability of a false alarm Pfa using the following formula:
- Post-processing: This consists of polishing the binary image by removing artifacts and holes using a morphological filter.
- Edge detection: This consists of extracting the 1-pixel continuous coastline by processing the binary image; here, this is carried out using a well-known edge detector, Sobel kernel, which measures the 2D spatial gradient on the binary image to emphasize edges. This Kernel provides the best trade-off between detection accuracy and time effectiveness.
2.2. Processing of LIDAR Measurements
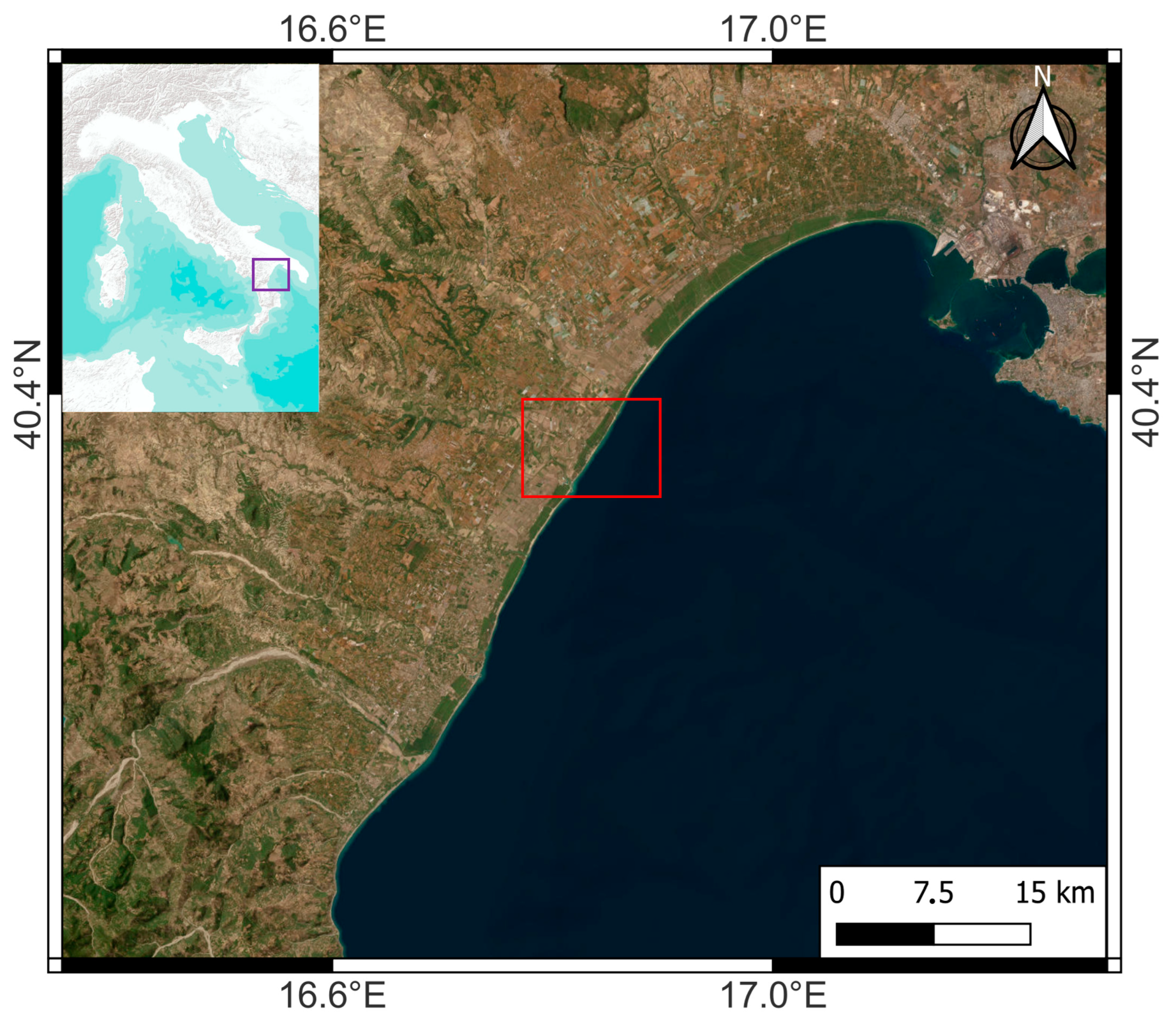
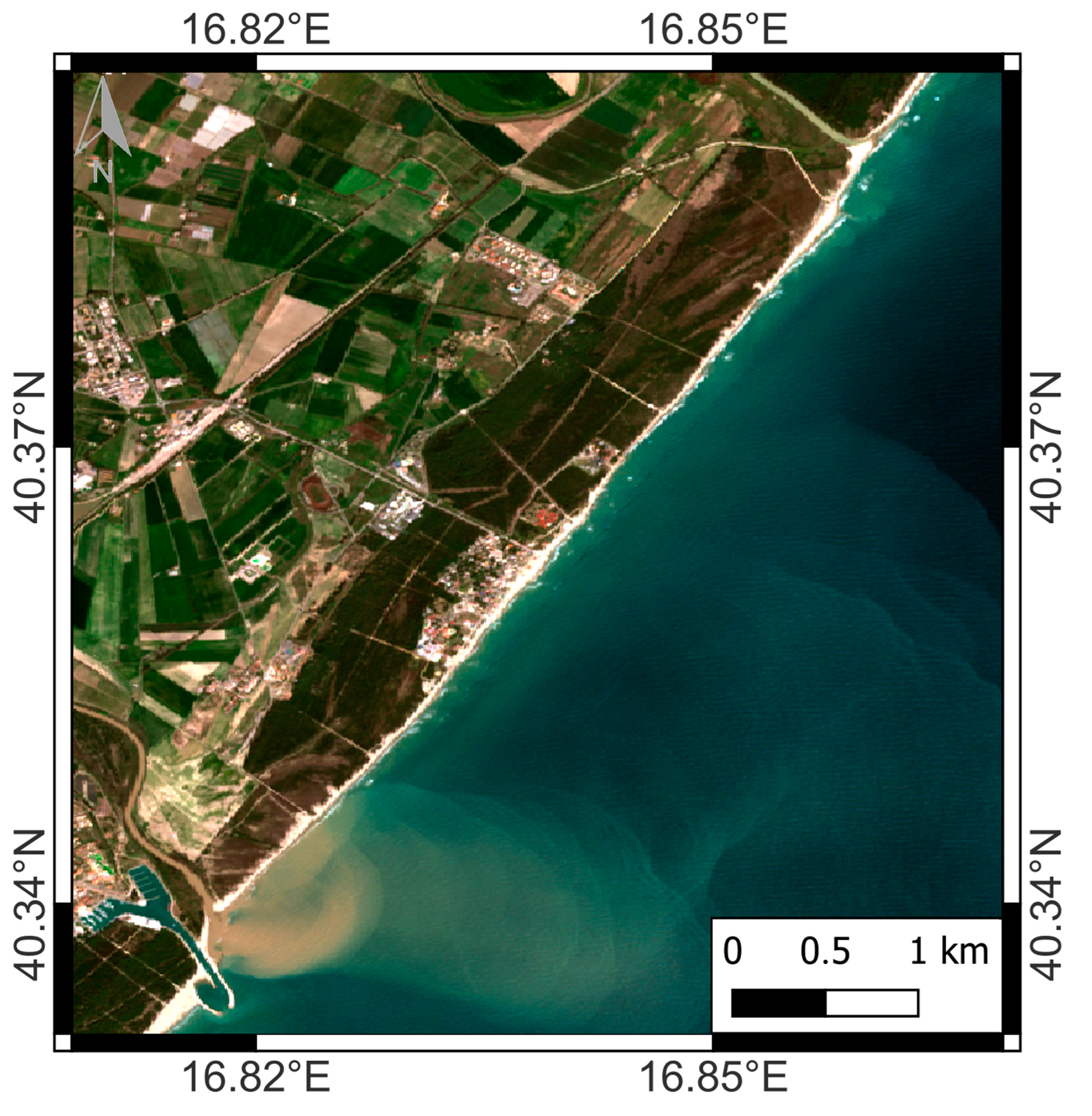
3. Data Set
4. Experiments and Results
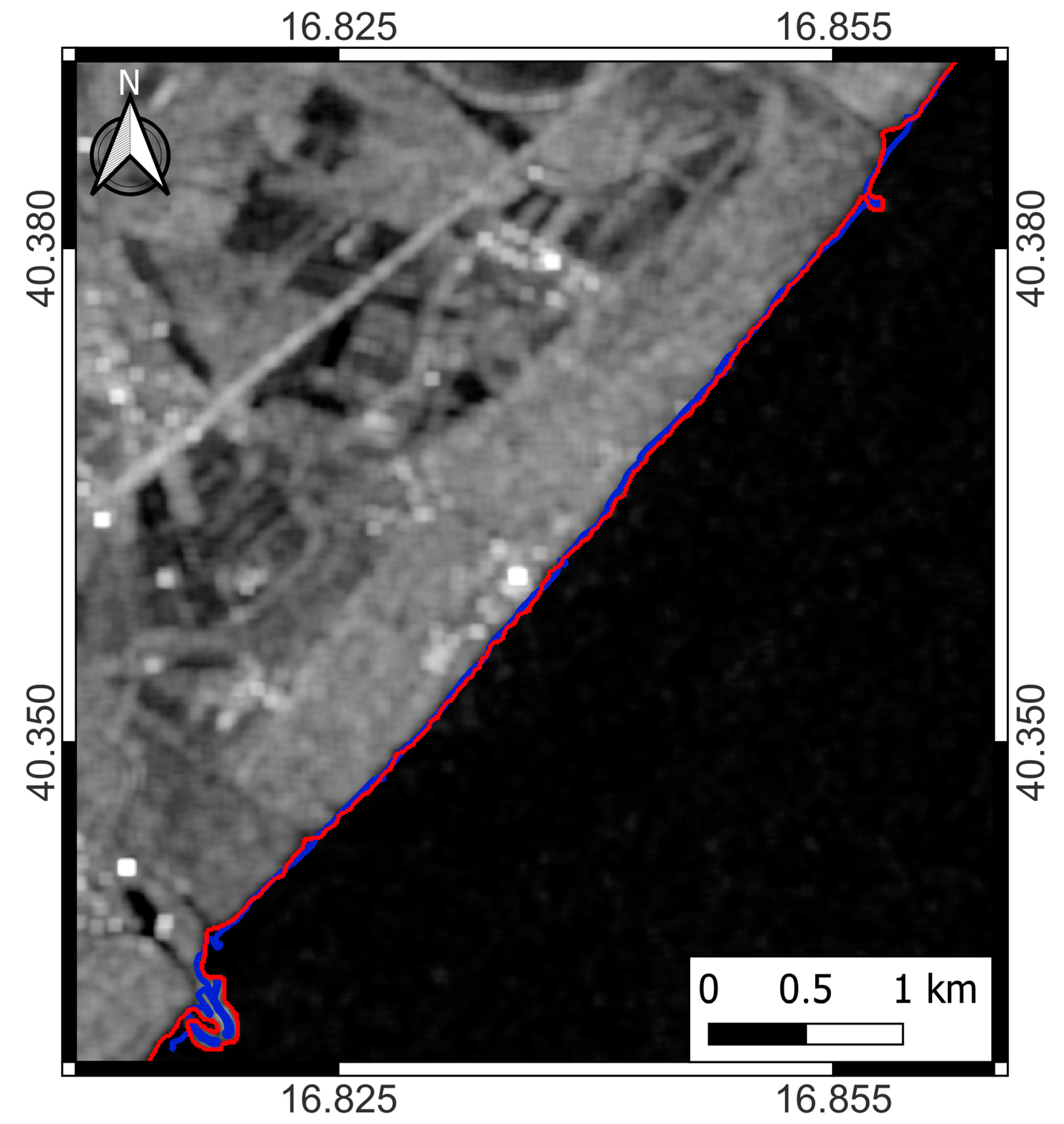
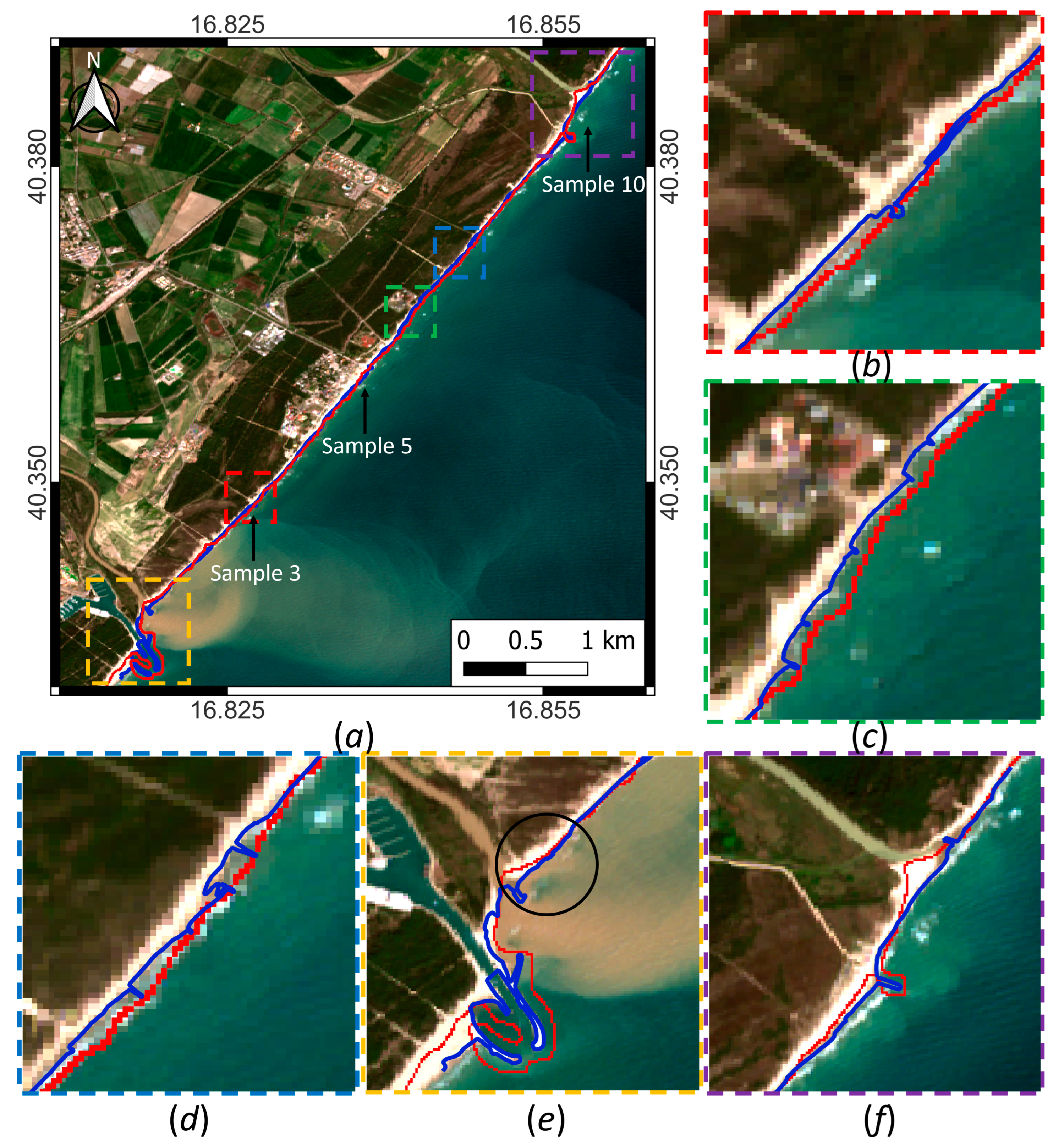
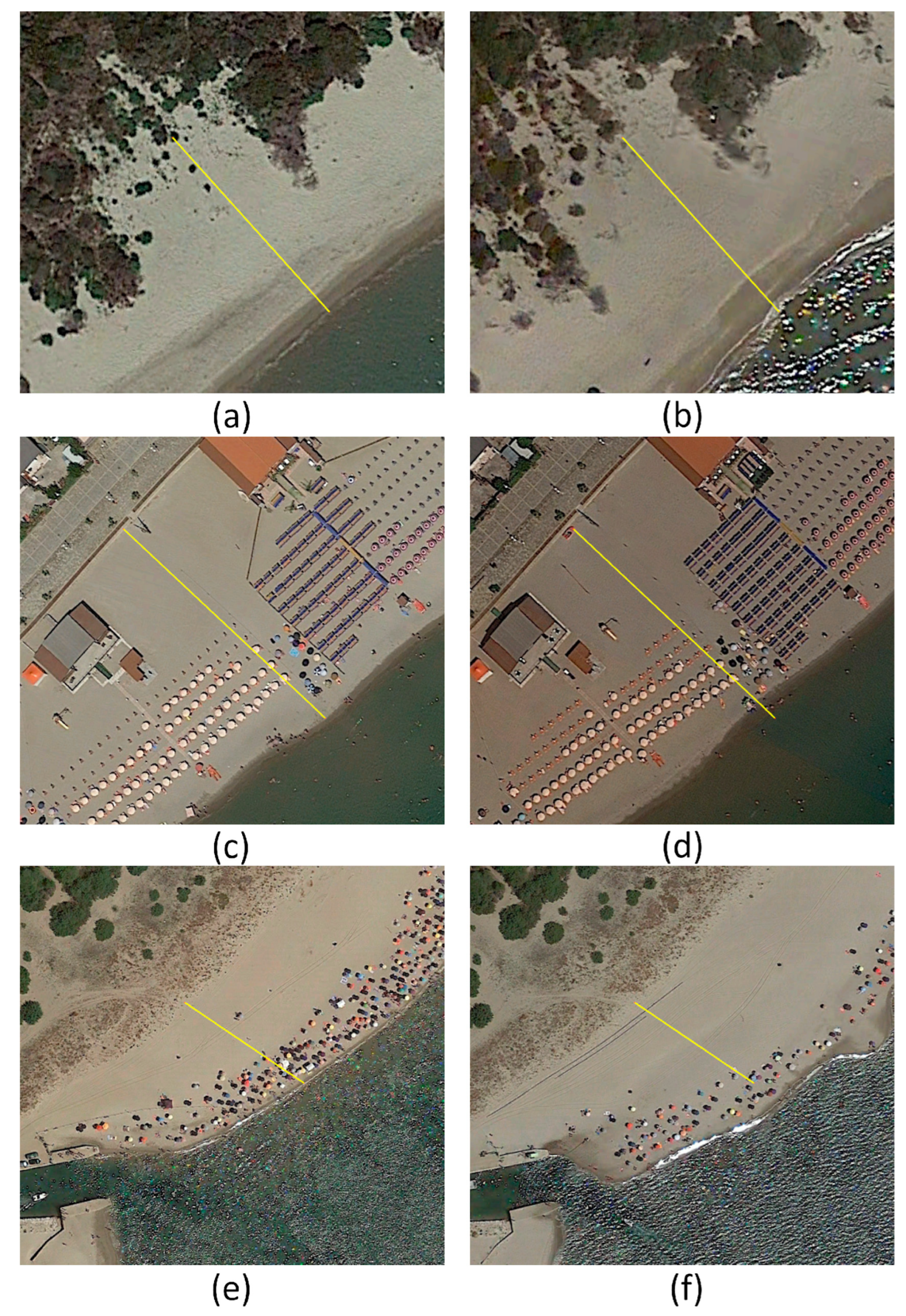
4.1. Accuracy Analysis
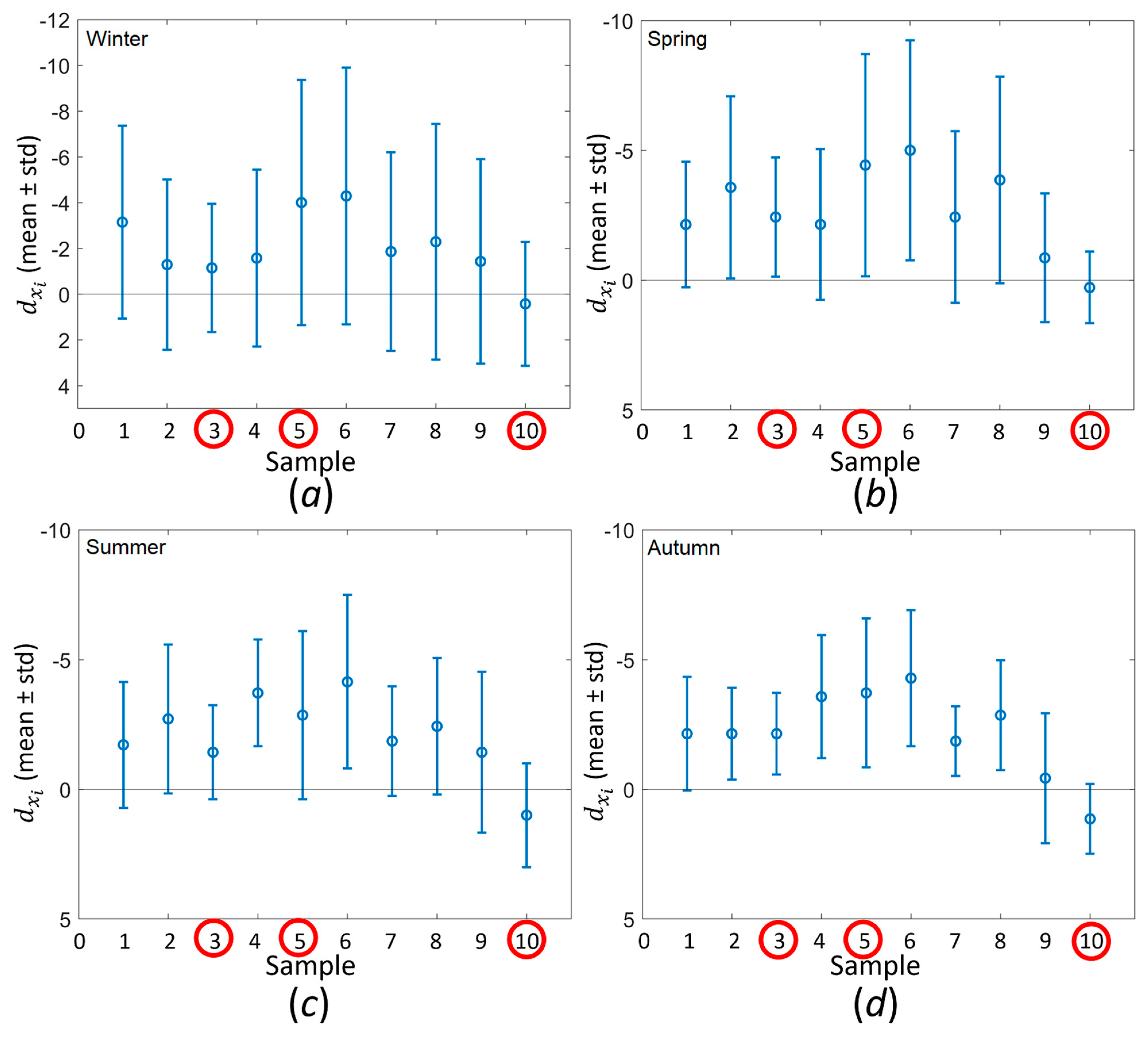
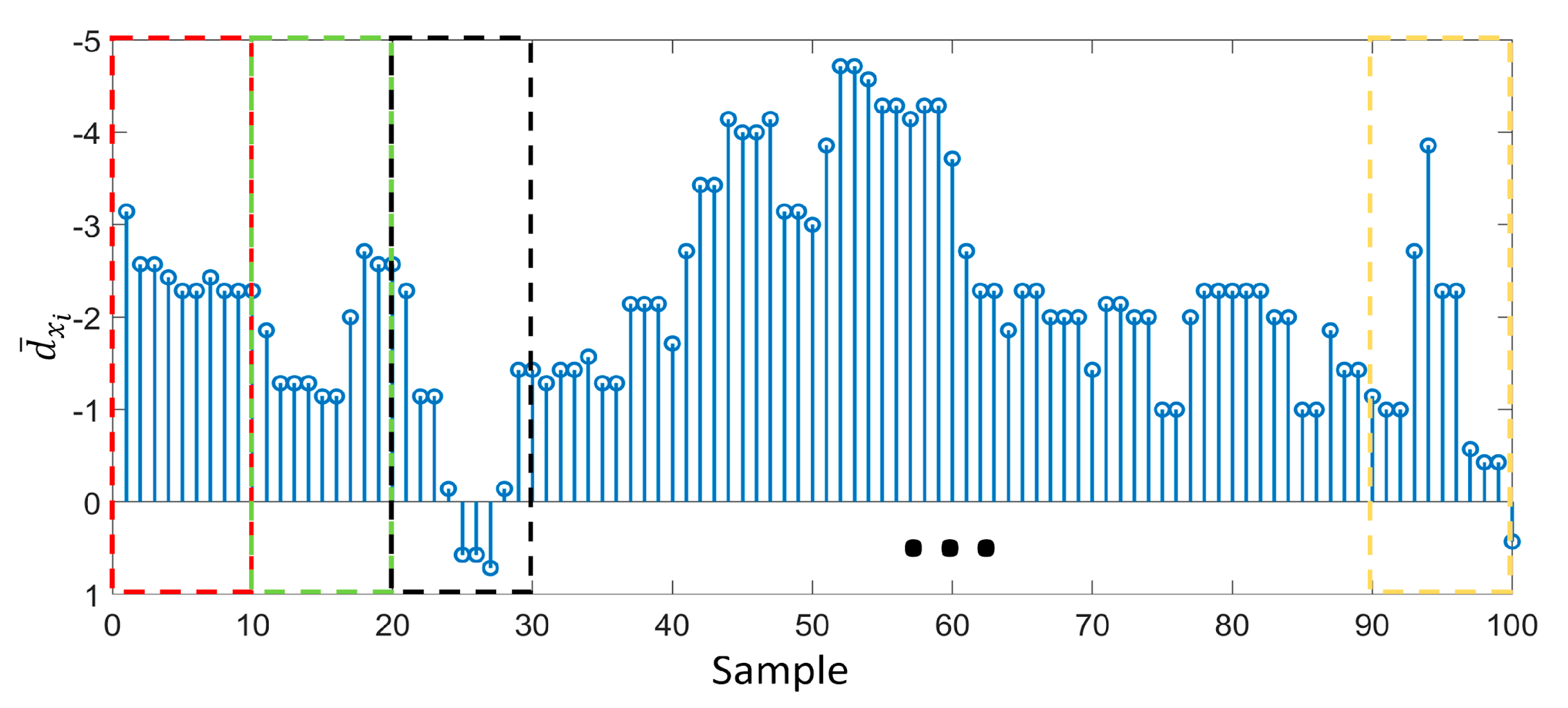
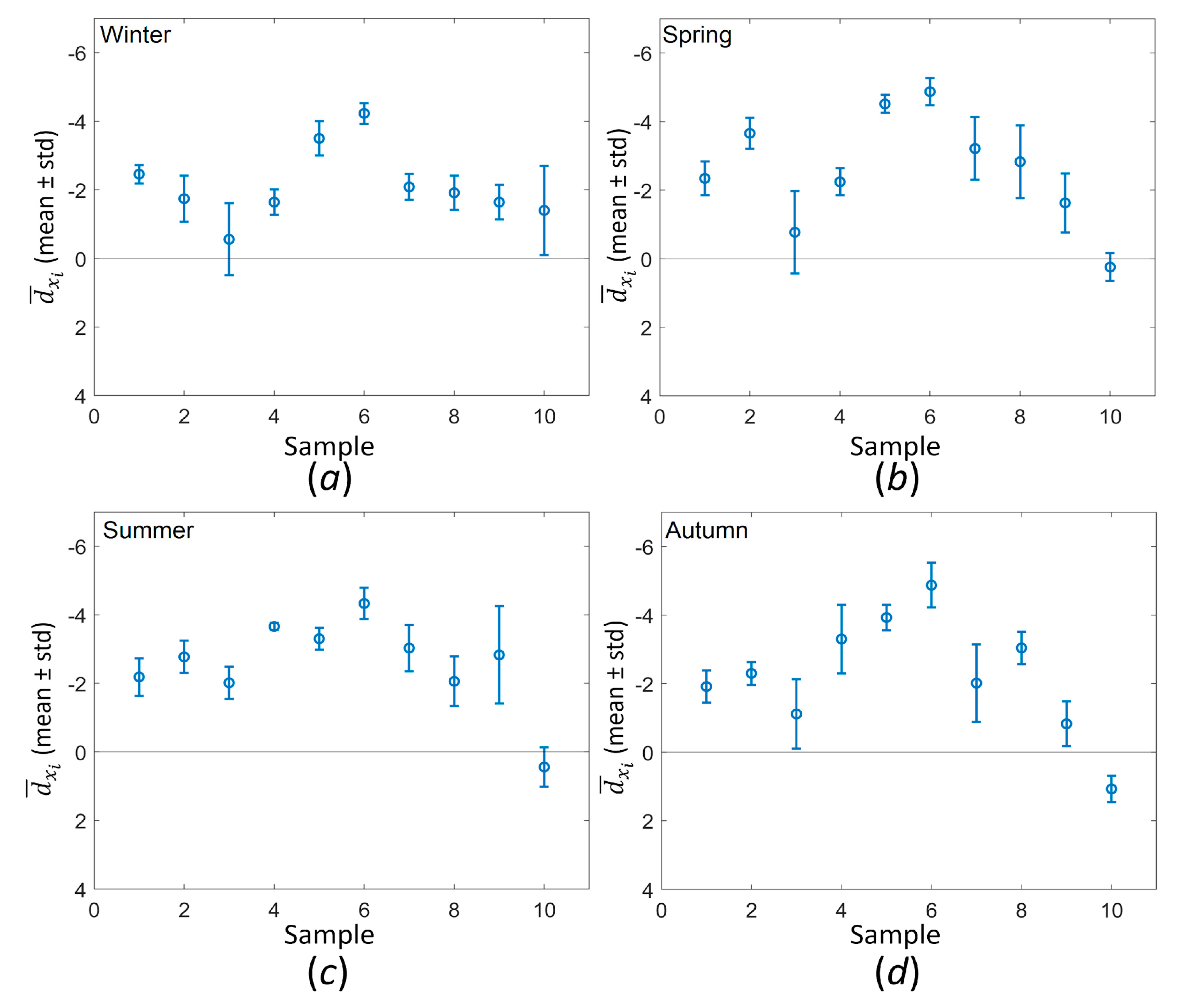
4.2. Time Variability of the Extracted Coastlines
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bird, E.C.F. Coastal Erosion and Rising Sea-Level. In Sea-Level Rise and Coastal Subsidence: Causes, Consequences, and Strategies; Milliman, J.D., Haq, B.U., Eds.; Coastal Systems and Continental Margins; Springer: Dordrecht, The Netherlands, 1996; pp. 87–103. ISBN 978-94-015-8719-8. [Google Scholar]
- Pellicani, R.; Argentiero, I.; Fidelibus, M.D.; Zanin, G.M.; Parisi, A.; Spilotro, G. Dynamics of the Basilicata Ionian Coast: Human and Natural Drivers. Rend. Fis. Acc. Lincei 2020, 31, 353–364. [Google Scholar] [CrossRef]
- Pardo-Pascual, J.E.; Almonacid-Caballer, J.; Ruiz, L.A.; Palomar-Vázquez, J. Automatic Extraction of Shorelines from Landsat TM and ETM+ Multi-Temporal Images with Subpixel Precision. Remote Sens. Environ. 2012, 123, 1–11. [Google Scholar] [CrossRef]
- Janušaitė, R.; Jukna, L.; Jarmalavičius, D.; Pupienis, D.; Žilinskas, G. A Novel GIS-Based Approach for Automated Detection of Nearshore Sandbar Morphological Characteristics in Optical Satellite Imagery. Remote Sens. 2021, 13, 2233. [Google Scholar] [CrossRef]
- Chi, S.; Zhang, C.; Zheng, J. Sandy Shoreline Recovery Ability after Breakwater Removal. Front. Mar. Sci. 2023, 10, 1191386. [Google Scholar] [CrossRef]
- Lee, J.; Jurkevich, I. Coastline Detection And Tracing In SAr Images. IEEE Trans. Geosci. Remote Sens. 1990, 28, 662–668. [Google Scholar] [CrossRef]
- Pelich, R.; Chini, M.; Hostache, R.; Matgen, P.; López-Martinez, C. Coastline Detection Based on Sentinel-1 Time Series for Ship- and Flood-Monitoring Applications. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1771–1775. [Google Scholar] [CrossRef]
- Niedermeier, A.; Romaneessen, E.; Lehner, S. Detection of Coastlines in SAR Images Using Wavelet Methods. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2270–2281. [Google Scholar] [CrossRef]
- Sheng, G.; Yang, W.; Deng, X.; He, C.; Cao, Y.; Sun, H. Coastline Detection in Synthetic Aperture Radar (SAR) Images by Integrating Watershed Transformation and Controllable Gradient Vector Flow (GVF) Snake Model. IEEE J. Ocean. Eng. 2012, 37, 375–383. [Google Scholar] [CrossRef]
- Baselice, F.; Ferraioli, G. Unsupervised Coastal Line Extraction From SAR Images. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1350–1354. [Google Scholar] [CrossRef]
- Yu, Y.; Acton, S.T. Automated Delineation of Coastline from Polarimetric SAR Imagery. Int. J. Remote Sens. 2004, 25, 3423–3438. [Google Scholar] [CrossRef]
- Modava, M.; Akbarizadeh, G.; Soroosh, M. Integration of Spectral Histogram and Level Set for Coastline Detection in SAR Images. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 810–819. [Google Scholar] [CrossRef]
- Baghdadi, N.; Pedreros, R.; Lenotre, N.; Dewez, T.; Paganini, M. Impact of Polarization and Incidence of the ASAR Sensor on Coastline Mapping: Example of Gabon. Int. J. Remote Sens. 2007, 28, 3841–3849. [Google Scholar] [CrossRef]
- Moon, W.M.; Staples, G.; Kim, D.; Park, S.-E.; Park, K.-A. RADARSAT-2 and Coastal Applications: Surface Wind, Waterline, and Intertidal Flat Roughness. Proc. IEEE 2010, 98, 800–815. [Google Scholar] [CrossRef]
- Kim, D.; Moon, W.M.; Park, S.-E.; Kim, J.-E.; Lee, H.-S. Dependence of Waterline Mapping on Radar Frequency Used for SAR Images in Intertidal Areas. IEEE Geosci. Remote Sens. Lett. 2007, 4, 269–273. [Google Scholar] [CrossRef]
- Ding, X.; Nunziata, F.; Li, X.; Migliaccio, M. Performance Analysis and Validation of Waterline Extraction Approaches Using Single- and Dual-Polarimetric SAR Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 1019–1027. [Google Scholar] [CrossRef]
- Nunziata, F.; Buono, A.; Migliaccio, M.; Benassai, G. Dual-Polarimetric C- and X-Band SAR Data for Coastline Extraction. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4921–4928. [Google Scholar] [CrossRef]
- Ferrentino, E.; Nunziata, F.; Migliaccio, M. Full-Polarimetric SAR Measurements for Coastline Extraction and Coastal Area Classification. Int. J. Remote Sens. 2017, 38, 7405–7421. [Google Scholar] [CrossRef]
- Schmitt, M.; Baier, G.; Zhu, X.X. Potential of Nonlocally Filtered Pursuit Monostatic TanDEM-X Data for Coastline Detection. ISPRS J. Photogramm. Remote Sens. 2019, 148, 130–141. [Google Scholar] [CrossRef]
- Xue, W.; Yang, H.; Wu, Y.; Kong, P.; Xu, H.; Wu, P.; Ma, X. Water Body Automated Extraction in Polarization SAR Images With Dense-Coordinate-Feature-Concatenate Network. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 12073–12087. [Google Scholar] [CrossRef]
- Scharf, L.L.; Demeure, C. Statistical Signal Processing: Detection, Estimation, and Time Series Analysis; Addison-Wesley Publishing Company: Boston, MA, USA, 1991; ISBN 978-0-201-19038-0. [Google Scholar]
- Bandini, F.; Sunding, T.P.; Linde, J.; Smith, O.; Jensen, I.K.; Köppl, C.J.; Butts, M.; Bauer-Gottwein, P. Unmanned Aerial System (UAS) Observations of Water Surface Elevation in a Small Stream: Comparison of Radar Altimetry, LIDAR and Photogrammetry Techniques. Remote Sens. Environ. 2020, 237, 111487. [Google Scholar] [CrossRef]
- Thayer, J.; Sacca, K.; Thompson, G.; Bukowski, S.; Garby, B. Novel UAS-Based LiDAR for Shallow-Water Bathymetry. In Proceedings of the AGU Fall Meeting 2021, New Orleans, LA, USA, 13–17 December 2021; Volume 2021, p. G55D-0277. [Google Scholar]
- Gisler, A.; Thayer, J.P.; Nderson, C.; Crowley, G. The First UAV-Borne Scanning Topographic and Bathymetric Lidar System for Mapping Coastal Regions. In Proceedings of the American Geophysical Union, Fall Meeting 2018, Washington, DC, USA, 10–14 December 2018; Volume 2018, p. EP52D-33. [Google Scholar]
- Szafarczyk, A.; Toś, C. The Use of Green Laser in LiDAR Bathymetry: State of the Art and Recent Advancements. Sensors 2023, 23, 292. [Google Scholar] [CrossRef] [PubMed]
- Famiglietti, N.A.; Cecere, G.; Grasso, C.; Memmolo, A.; Vicari, A. A Test on the Potential of a Low Cost Unmanned Aerial Vehicle RTK/PPK Solution for Precision Positioning. Sensors 2021, 21, 3882. [Google Scholar] [CrossRef] [PubMed]
- Zhang, B.; Perrie, W. Cross-Polarized Synthetic Aperture Radar: A New Potential Measurement Technique for Hurricanes. Bull. Am. Meteorol. Soc. 2012, 93, 531–541. [Google Scholar] [CrossRef]
- Benassai, G.; Migliaccio, M.; Montuori, A.; Ricchi, A. Wave Simulations Through Sar Cosmo-Skymed Wind Retrieval and Verification with Buoy Data. In Proceedings of the The Twenty-second International Offshore and Polar Engineering Conference, Rhodes, Greece, 17–22 June 2012. [Google Scholar]
- Shannon, C.E. A Mathematical Theory of Communication. Bell Syst. Tech. J. 1948, 27, 623–656. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Acquisition Date (dd/mm/yyyy) | Resolution (m) | Season | LIDAR Measurement |
|---|---|---|---|---|
| Sentinel-1 | 28/10/2015 | 10 | Autumn | No |
| Sentinel-1 | 13/01/2015 | 10 | Winter | No |
| Sentinel-1 | 01/05/2015 | 10 | Spring | No |
| Sentinel-1 | 24/07/2015 | 10 | Summer | No |
| Sentinel-1 | 20/01/2016 | 10 | Winter | No |
| Sentinel-1 | 19/05/2016 | 10 | Spring | No |
| Sentinel-1 | 11/08/2016 | 10 | Summer | No |
| Sentinel-1 | 09/11/2016 | 10 | Autumn | No |
| Sentinel-1 | 08/01/2017 | 10 | Winter | No |
| Sentinel-1 | 02/04/2017 | 10 | Spring | No |
| Sentinel-1 | 06/08/2017 | 10 | Summer | No |
| Sentinel-1 | 17/10/2017 | 10 | Autumn | No |
| Sentinel-1 | 15/01/2018 | 10 | Winter | No |
| Sentinel-1 | 21/04/2018 | 10 | Spring | No |
| Sentinel-1 | 01/08/2018 | 10 | Summer | No |
| Sentinel-1 | 24/10/2018 | 10 | Autumn | No |
| Sentinel-1 | 04/01/2019 | 10 | Winter | No |
| Sentinel-1 | 22/04/2019 | 10 | Spring | No |
| Sentinel-1 | 02/08/2019 | 10 | Summer | No |
| Sentinel-1 | 19/10/2019 | 10 | Autumn | No |
| Sentinel-1 | 11/01/2020 | 10 | Winter | No |
| Sentinel-1 | 28/04/2020 | 10 | Spring | No |
| Sentinel-1 | 02/08/2020 | 10 | Summer | No |
| Sentinel-1 | 25/10/2020 | 10 | Autumn | No |
| Sentinel-1 | 05/01/2021 | 10 | Winter | No |
| Sentinel-1 | 11/04/2021 | 10 | Spring | No |
| Sentinel-1 | 10/07/2021 | 10 | Summer | No |
| Sentinel-1 | 20/10/2021 | 10 | Autumn | No |
| Sentinel-1 | 12/04/2022 | 10 | Spring | Yes |
| Sentinel-2 | 09/04/2022 | 20 | Spring | No |
| Google Earth | 29/08/2015 | N/A | Summer | No |
| Google Earth | 31/07/2016 | N/A | Summer | No |
| Google Earth | 08/072017 | N/A | Summer | No |
| Google Earth | 19/07/2018 | N/A | Summer | No |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ferrentino, E.; Famiglietti, N.A.; Nunziata, F.; Inserra, G.; Buono, A.; Moschillo, R.; Memmolo, A.; Colangelo, G.; Vicari, A.; Migliaccio, M. The Use of Satellite Synthetic Aperture Radar Imagery to Assist in the Monitoring of the Time Evolution of Challenging Coastal Environments: A Case Study of the Basilicata Coast. Environments 2023, 10, 212. https://doi.org/10.3390/environments10120212
Ferrentino E, Famiglietti NA, Nunziata F, Inserra G, Buono A, Moschillo R, Memmolo A, Colangelo G, Vicari A, Migliaccio M. The Use of Satellite Synthetic Aperture Radar Imagery to Assist in the Monitoring of the Time Evolution of Challenging Coastal Environments: A Case Study of the Basilicata Coast. Environments. 2023; 10(12):212. https://doi.org/10.3390/environments10120212
Chicago/Turabian StyleFerrentino, Emanuele, Nicola Angelo Famiglietti, Ferdinando Nunziata, Giovanna Inserra, Andrea Buono, Raffaele Moschillo, Antonino Memmolo, Gerardo Colangelo, Annamaria Vicari, and Maurizio Migliaccio. 2023. "The Use of Satellite Synthetic Aperture Radar Imagery to Assist in the Monitoring of the Time Evolution of Challenging Coastal Environments: A Case Study of the Basilicata Coast" Environments 10, no. 12: 212. https://doi.org/10.3390/environments10120212
APA StyleFerrentino, E., Famiglietti, N. A., Nunziata, F., Inserra, G., Buono, A., Moschillo, R., Memmolo, A., Colangelo, G., Vicari, A., & Migliaccio, M. (2023). The Use of Satellite Synthetic Aperture Radar Imagery to Assist in the Monitoring of the Time Evolution of Challenging Coastal Environments: A Case Study of the Basilicata Coast. Environments, 10(12), 212. https://doi.org/10.3390/environments10120212