


Optimizing Geophysical Inversion: Versatile Regularization and Prior Integration Strategies for Electrical and Seismic Tomographic Data


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. The Inversion Algorithm
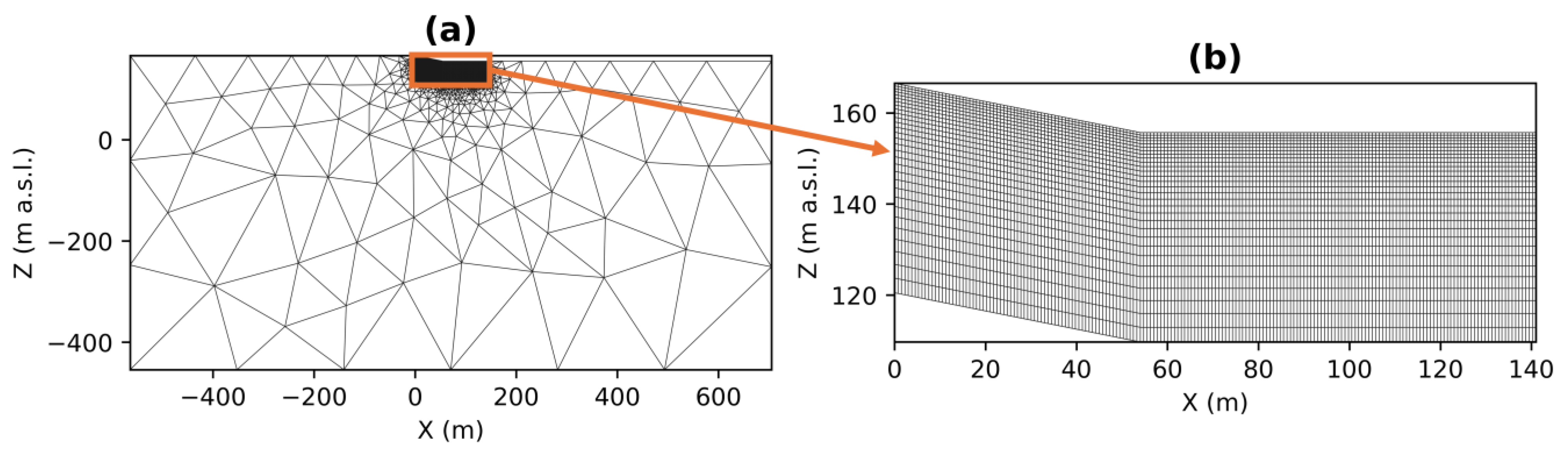
2.1. Meshing
2.2. Forward Modeling
2.3. Inversion
2.3.1. Blocky Inversion
2.3.2. Selection of the Regularization Parameter
2.3.3. Prior Information
3. Examples
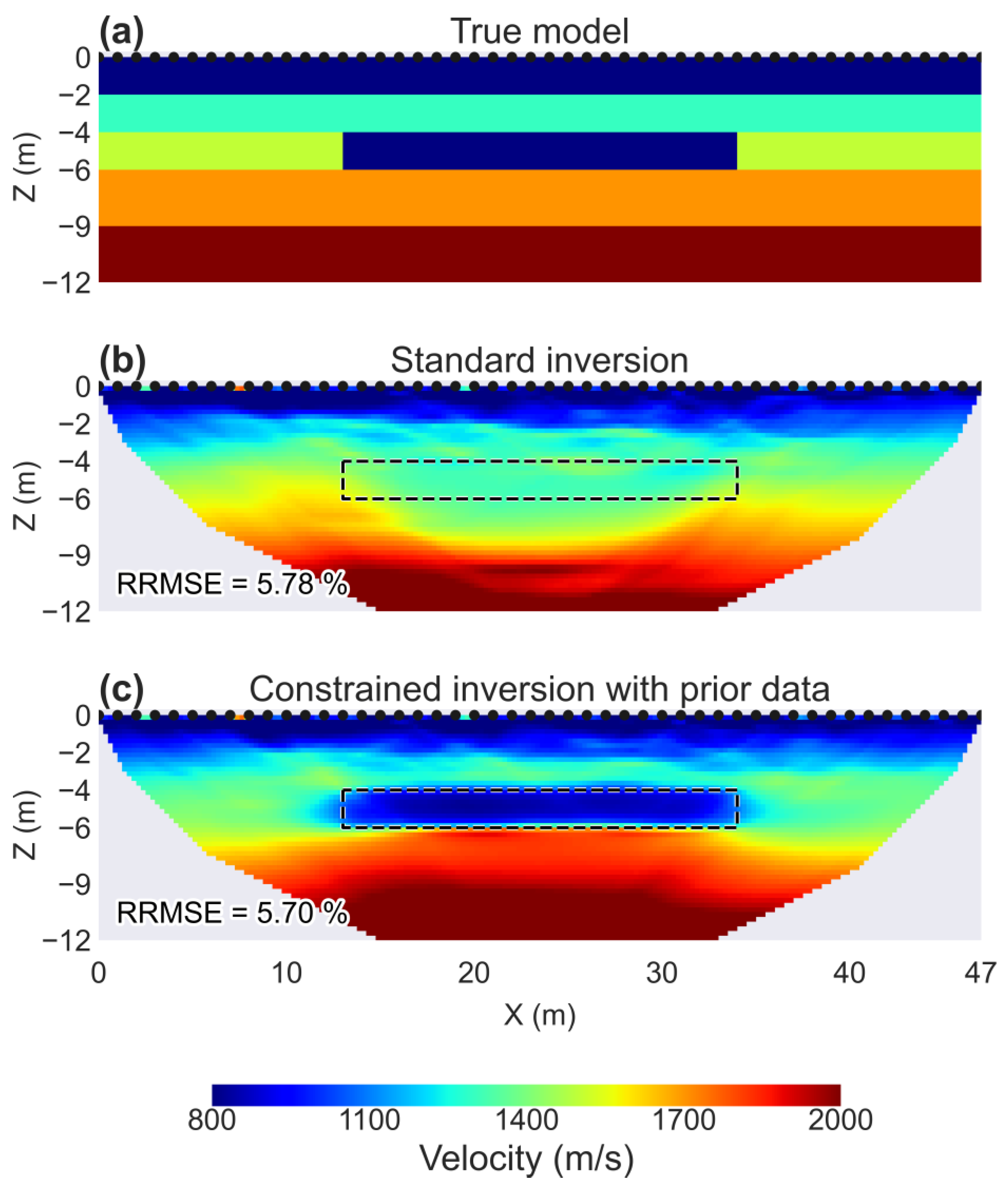
3.1. SYN: SRT Data in the Case of Velocity Inversion
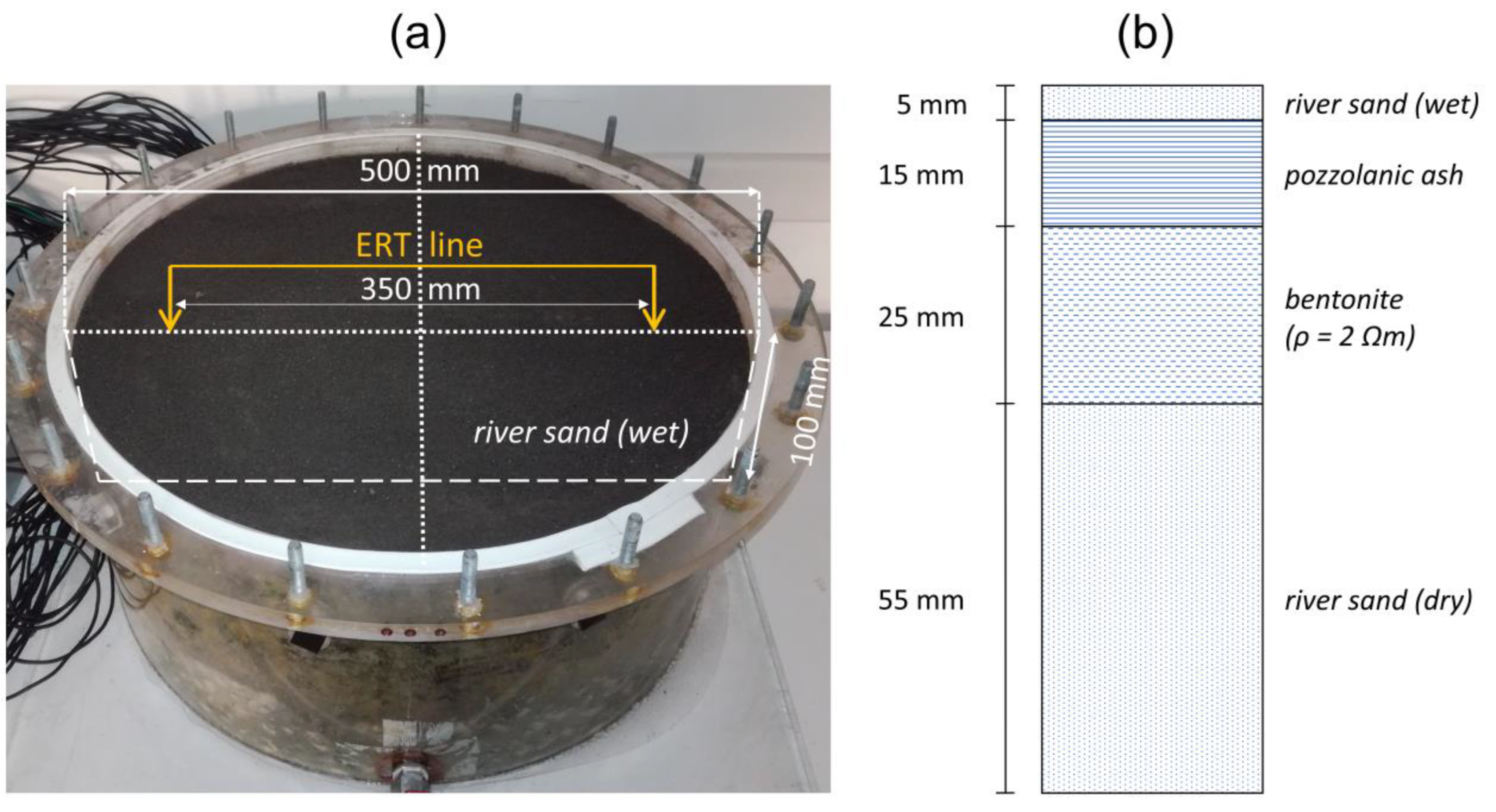
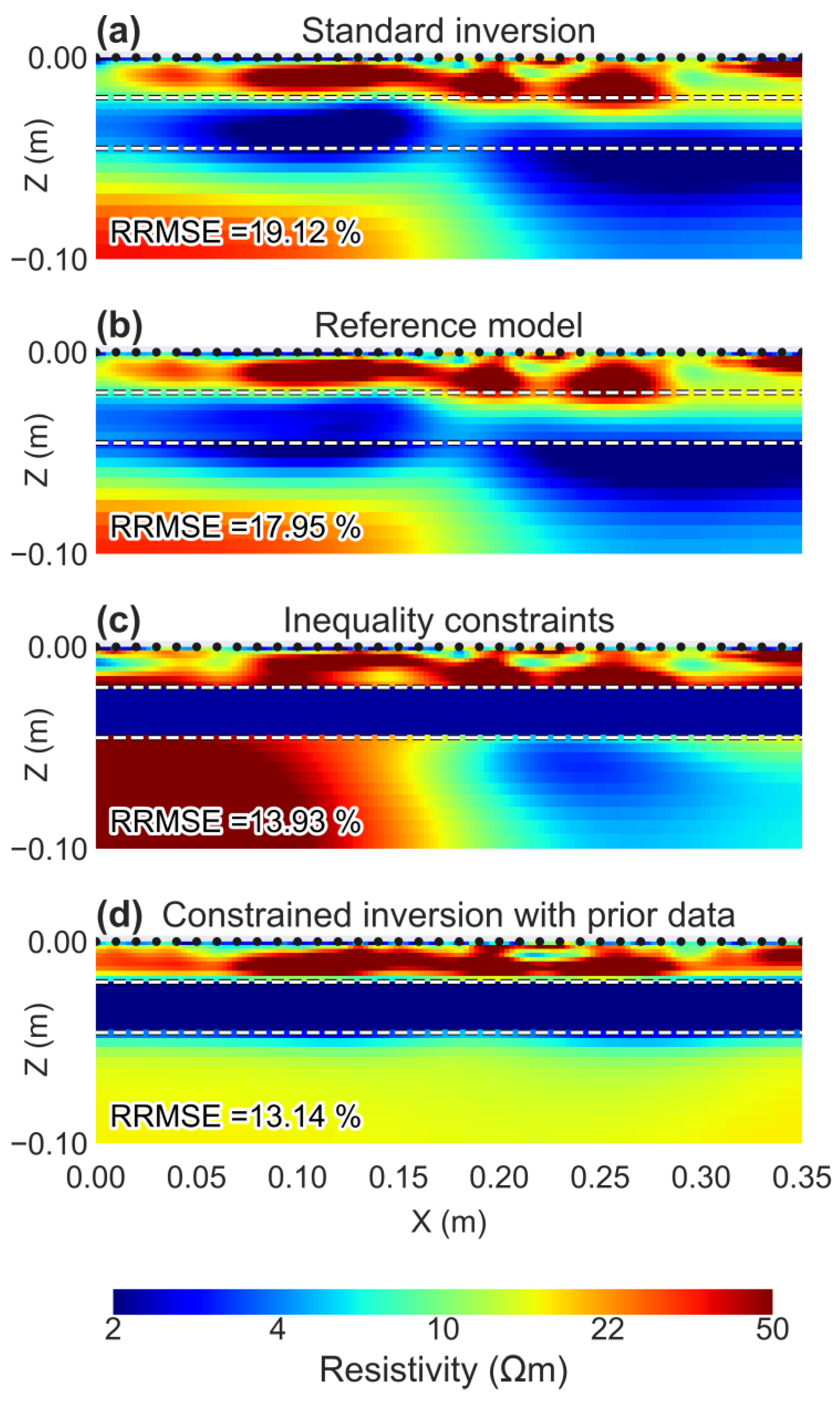
3.2. LAB: ERT Data for a Laboratory Model
3.3. RW: ERT/TDIP for Landfill Detection
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Perrone, A.; Lapenna, V.; Piscitelli, S. Electrical resistivity tomography technique for landslide investigation: A review. Earth-Sci. Rev. 2014, 135, 65–82. [Google Scholar] [CrossRef]
- Soupios, P.; Ntarlagiannis, D. Characterization and Monitoring of Solid Waste Disposal Sites Using Geophysical Methods: Current Applications and Novel Trends; Sengupta, D., Agrahari, S., Eds.; Modelling Trends in Solid and Hazardous Waste Management; Springer: Singapore, 2017. [Google Scholar] [CrossRef]
- Slater, L. Near Surface Electrical Characterization of Hydraulic Conductivity: From Petrophysical Properties to Aquifer Geometries—A Review. Surv. Geophys. 2007, 28, 169–197. [Google Scholar] [CrossRef]
- De Donno, G.; Cardarelli, E. Tomographic inversion of time-domain resistivity and chargeability data for the investigation of landfills using a priori information. Waste Manag. 2017, 59, 302–315. [Google Scholar] [CrossRef] [PubMed]
- Auken, E.; Christiansen, A.V.; Fiandaca, G.; Schamper, C.; Behroozmand, A.A.; Binley, A.; Nielsen, E.; Effersø, F.; Christensen, N.B.; Sørensen, K.I.; et al. An overview of a highly versatile forward and stable inverse algorithm for airborne, ground-based and borehole electromagnetic and electric data. Explor. Geophys. 2015, 46, 223–235. [Google Scholar] [CrossRef]
- Blanchy, G.; Saneiyan, S.; Boyd, J.; McLachlan, P.; Binley, A. ResIPy, an intuitive open source software for complex geoelectrical inversion/modelling. Comput. Geosci. 2020, 137, 104423. [Google Scholar] [CrossRef]
- Karaoulis, M.; Revil, A.; Tsourlos, P.; Werkema, D.D.; Minsley, B.J. IP4DI: A software for time-lapse 2D/3D DC-resistivity and induced polarization tomography. Comput. Geosci. 2013, 54, 164–170. [Google Scholar] [CrossRef]
- Guedes, V.J.C.B.; Maciel, S.T.R.; Rocha, M.P. Refrapy: A Python program for seismic refraction data analysis. Comput. Geosci. 2022, 159, 105020. [Google Scholar] [CrossRef]
- Zeyen, H.; Léger, E. PyRefra—Refraction seismic data treatment and inversion. Comput. Geosci. 2024, 185, 105556. [Google Scholar] [CrossRef]
- Cockett, R.; Kang, S.; Heagy, L.J.; Pidlisecky, A.; Oldenburg, D.W. SimPEG: An open source framework for simulation and gradient based parameter estimation in geophysical applications. Comput. Geosci. 2015, 85, 142–154. [Google Scholar] [CrossRef]
- Rücker, C.; Günther, T.; Wagner, F.M. pyGIMLi: An open-source library for modelling and inversion in geophysics. Comput. Geosci. 2017, 109, 106–123. [Google Scholar] [CrossRef]
- Constable, S.; Parker, R.L.; Constable, C.G. Occam’s inversion; a practical algorithm for generating smooth models from electromagnetic sounding data. GEOPHYSICS 1987, 52, 289–300. [Google Scholar] [CrossRef]
- Tikhonov, A.N.; Arsenin, V.Y. Solution of Ill-Posed Problems; Winston and Sons: Washington, DC, USA, 1977. [Google Scholar]
- Farquharson, C.G.; Oldenburg, D.W. A comparison of automatic techniques for estimating the regularization parameter in non-linear inverse problems. Geophys. J. Int. 2004, 156, 411–425. [Google Scholar] [CrossRef]
- Vogel, C.R. Non-convergence of the L-curve regularization parameter selection method. Inverse Probl. 1996, 12, 535–547. [Google Scholar] [CrossRef]
- Zhdanov, M.S. Geophysical Inverse Theory and Regularization Problems; Elsevier: Amsterdam, The Netherlands, 2002. [Google Scholar]
- Sasaki, Y. Two-dimensional joint inversion of magnetotelluric and dipole-dipole resistivity data. GEOPHYSICS 1989, 54, 254–262. [Google Scholar] [CrossRef]
- Rücker, C.; Günther, T.; Spitzer, K. Three-dimensional modeling and inversion of dc resistivity data incorporating topography—I. Modelling. Geophys. J. Int. 2006, 166, 495–505. [Google Scholar] [CrossRef]
- Penta de Peppo, G.; Cercato, M.; De Donno, G. Cross-gradient joint inversion and clustering of ERT and SRT data on structured meshes incorporating topography. Geophys. J. Int. 2024, 239, 1155–1169. [Google Scholar] [CrossRef]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef]
- Moser, T.J. Shortest path calculation of seismic rays. GEOPHYSICS 1991, 56, 59–67. [Google Scholar] [CrossRef]
- Oldenburg, D.W.; Li, Y.G. Inversion of induced polarization data. GEOPHYSICS 1994, 59, 1327–1341. [Google Scholar] [CrossRef]
- Loke, M.H. Tutorial: 2-D and 3-D Electrical Imaging Surveys; Geotomo Software: Houston, TX, USA, 2001. [Google Scholar]
- Seigel, H.O. Mathematical formulation and type curves for induced polarization. GEOPHYSICS 1959, 24, 547–565. [Google Scholar] [CrossRef]
- McGillivray, P.R.; Oldenburg, D.W. Methods for calculating frechet derivatives and sensitivities for the non-linear inverse problem: A comparative study. Geophys. Prospect. 1990, 38, 499–524. [Google Scholar] [CrossRef]
- Kemna, A. Tomographic Inversion of Complex Resistivity. Ph.D. Thesis, Ruhr-Universität, Bochum Institut für Geophysik, 2000. [Google Scholar]
- Aki, K.; Richards, P.G. Quantitative Seismology, 2nd ed.; University Science Books: Mill Valley, CA, USA, 2002. [Google Scholar]
- Watanabe, T.; Matsuoka, T.; Ashida, Y. Seismic traveltime tomography using Fresnel volume approach. SEG Tech. Program Expand. Abstr. 1999, 18, 1402–1405. [Google Scholar] [CrossRef]
- Paige, C.C.; Saunders, M.A. LSQR: An algorithm for sparse linear equations and sparse least squares. ACM Trans. Math. Softw. 1982, 8, 43–71. [Google Scholar] [CrossRef]
- Günther, T. Inversion Methods and Resolution Analysis for the 2D/3D Reconstruction of Resistivity Structures from DC Measurements. Ph.D. Thesis, Technische Universität Bergakademie Freiberg, Freiberg, Germany, 2004. [Google Scholar] [CrossRef]
- Sanders, N.R. Measuring forecast accuracy: Some practical suggestions. Prod. Inventory Manag. J. 1997, 38, 43. [Google Scholar]
- Farquharson, C.G.; Oldenburg, D.W. Non-linear inversion using general measures of data misfit and model structure. Geophys. J. Int. 1998, 134, 213–227. [Google Scholar] [CrossRef]
- Loke, M.H.; Acworth, I.; Dahlin, T. A comparison of smooth and blocky inversion methods in 2D electrical imaging surveys. Explor. Geophys. 2003, 34, 182–187. [Google Scholar] [CrossRef]
- Holland, P.W.; Welsch, R.E. Robust regression using iteratively reweighted least-squares. Commun. Stat. —Theory Methods 1977, 6, 813–827. [Google Scholar] [CrossRef]
- Wolke, R.; Schwetlick, H. Iteratively Reweighted Least Squares: Algorithms, Convergence Analysis, and Numerical Comparisons. SIAM J. Sci. Stat. Comput. 1988, 9, 907–921. [Google Scholar] [CrossRef]
- Ghaedrahmati, R.; Moradzadeh, A.; Moradpouri, F. An effective estimate for selecting the regularization parameter in the 3D inversion of magnetotelluric data. Acta Geophys. 2022, 70, 609–621. [Google Scholar] [CrossRef]
- Zhdanov, M.S.; Wan, L.; Gribenko, A.; Čuma, M.; Key, K.; Constable, S. Large-scale 3D inversion of marine magnetotelluric data: Case study from the Gemini prospect, Gulf of Mexico. GEOPHYSICS 2011, 76, F77–F87. [Google Scholar] [CrossRef]
- Rezaie, M.; Moradzadeh, A.; Kalate, A.N.; Aghajani, H. Fast 3D Focusing Inversion of Gravity Data Using Reweighted Regularized Lanczos Bidiagonalization Method. Pure Appl. Geophys. 2017, 174, 359–374. [Google Scholar] [CrossRef]
- Kim, H.J.; Song, Y.; Lee, K.H. Inequality constraint in least-squared inversion of geophysical data. Earth Planets Space 1999, 51, 255–259. [Google Scholar] [CrossRef]
- Yari, M.; Nabi-Bidhendi, M.; Ghanati, R.; Shomali, Z.-H. Hidden layer imaging using joint inversion of P-wave travel-time and electrical resistivity data. Near Surf. Geophys. 2021, 19, 297–313. [Google Scholar] [CrossRef]
- Hunter, J.A.; Benjumea, B.; Harris, J.B.; Miller, R.D.; Pullan, S.E.; Burns, R.A.; Good, R.L. Surface and downhole shear wave seismic methods for thick soil site investigations. Soil Dyn. Earthq. Eng. 2002, 22, 931–941. [Google Scholar] [CrossRef]
- De Donno, G. 2D tomographic inversion of complex resistivity data on cylindrical models. Geophys. Prospect. 2013, 61, 586–601. [Google Scholar] [CrossRef]
- Rücker, C.; Günther, T. The simulation of finite ERT electrodes using the complete electrode model. GEOPHYSICS 2011, 76, F227–F238. [Google Scholar] [CrossRef]
- Ren, Z.; Kalscheuer, T. Uncertainty and resolution analysis of 2D and 3D inversion models computed from geophysical electromagnetic data. Surv. Geophys. 2020, 41, 47–112. [Google Scholar] [CrossRef]
- Oldenburg, D.W. Funnel functions in linear and nonlinear appraisal. J. Geophys. Res. 1983, 88, 7387–7398. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Penta de Peppo, G.; Cercato, M.; De Donno, G. Optimizing Geophysical Inversion: Versatile Regularization and Prior Integration Strategies for Electrical and Seismic Tomographic Data. Geosciences 2025, 15, 274. https://doi.org/10.3390/geosciences15070274
Penta de Peppo G, Cercato M, De Donno G. Optimizing Geophysical Inversion: Versatile Regularization and Prior Integration Strategies for Electrical and Seismic Tomographic Data. Geosciences. 2025; 15(7):274. https://doi.org/10.3390/geosciences15070274
Chicago/Turabian StylePenta de Peppo, Guido, Michele Cercato, and Giorgio De Donno. 2025. "Optimizing Geophysical Inversion: Versatile Regularization and Prior Integration Strategies for Electrical and Seismic Tomographic Data" Geosciences 15, no. 7: 274. https://doi.org/10.3390/geosciences15070274
APA StylePenta de Peppo, G., Cercato, M., & De Donno, G. (2025). Optimizing Geophysical Inversion: Versatile Regularization and Prior Integration Strategies for Electrical and Seismic Tomographic Data. Geosciences, 15(7), 274. https://doi.org/10.3390/geosciences15070274