

Coupled Large Deformation Finite Element Formulations for the Dynamics of Unsaturated Soil and Their Application


Abstract
:1. Introduction
2. Summary of Governing Equations
2.1. Mass Balance Equations
- Mass balance for the solid phase:
- Mass balance for the water phase:
- Mass balance for the air phase:
2.2. Momentum Balance Equations
- Linear momentum balance for the mixture:
- Linear momentum balance for the water:
- Linear momentum balance for the air:
3. Updated Lagrangian Formulation of Governing Equations
3.1. Application of the Principle of Virtual Work
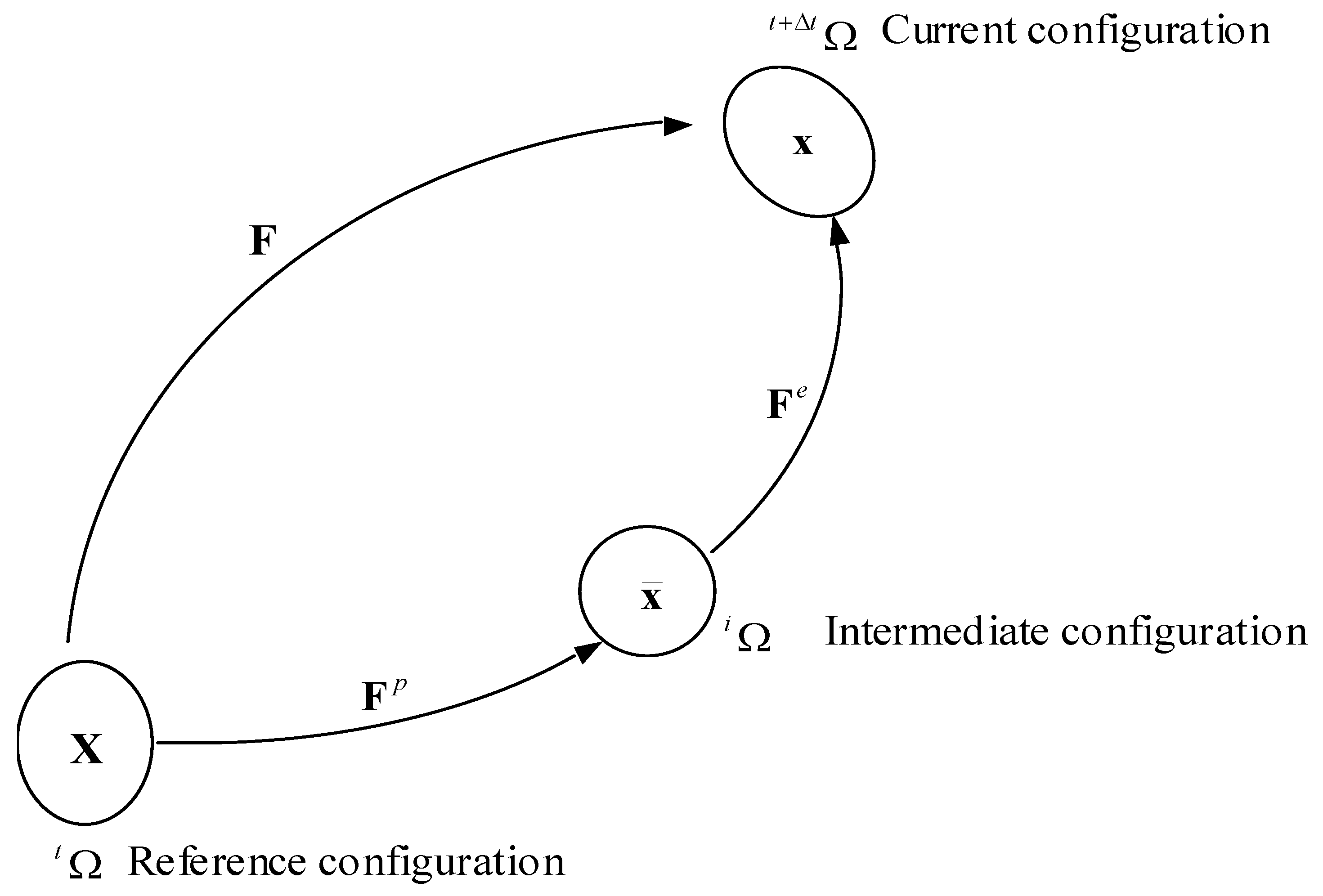
3.2. Stress–Strain Relationship for the Solid Skeleton undergoing Large Deformation
3.3. Stress-State Variables for Unsaturated Soils
3.4. Boundary Conditions
- Solid displacement boundary condition:
- Water displacement boundary condition:
- Air displacement boundary condition:
- Traction boundary condition:
- Pore water pressure boundary condition:
- Pore air pressure boundary condition:
3.5. Incremental Equations and Newton’s Method
4. Finite Element Forms of Complete and Reduced Governing Equations
4.1. Complete Formulation
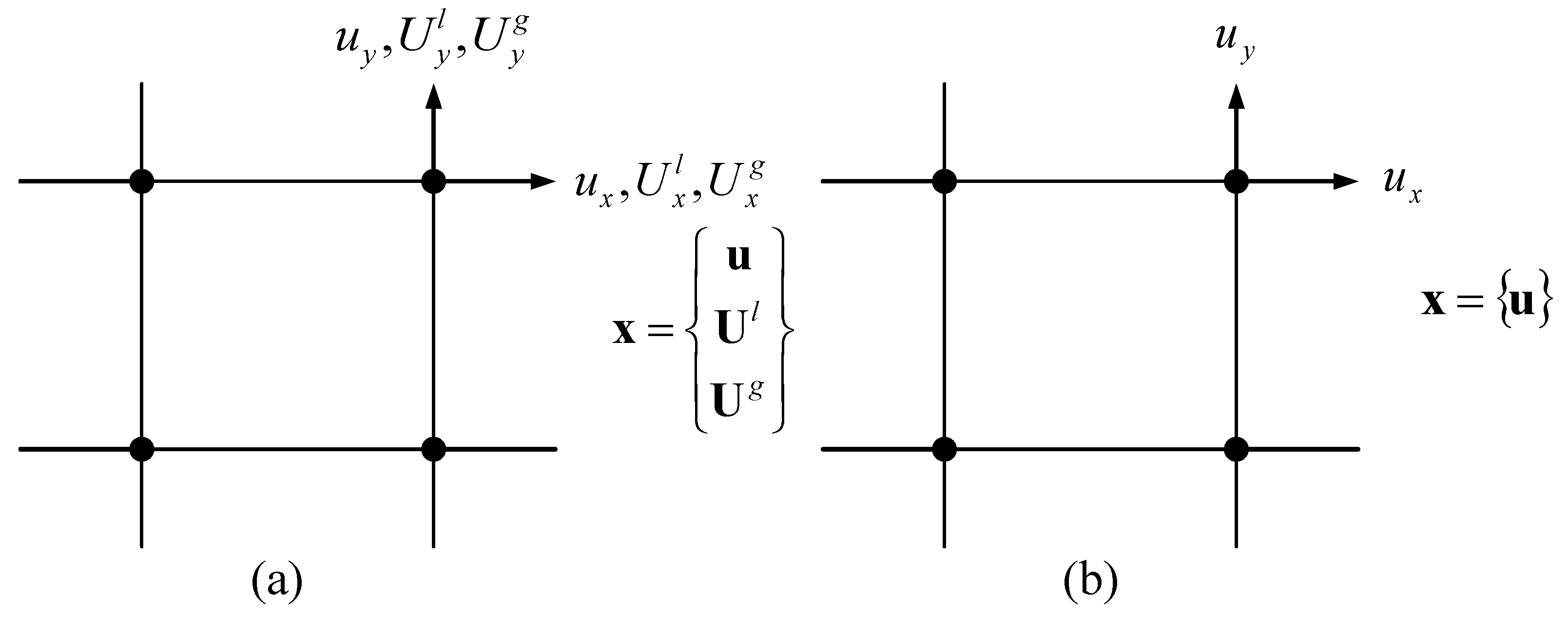
4.2. Simplified Formulation
4.3. Finite Element Formulation
5. Example Simulations
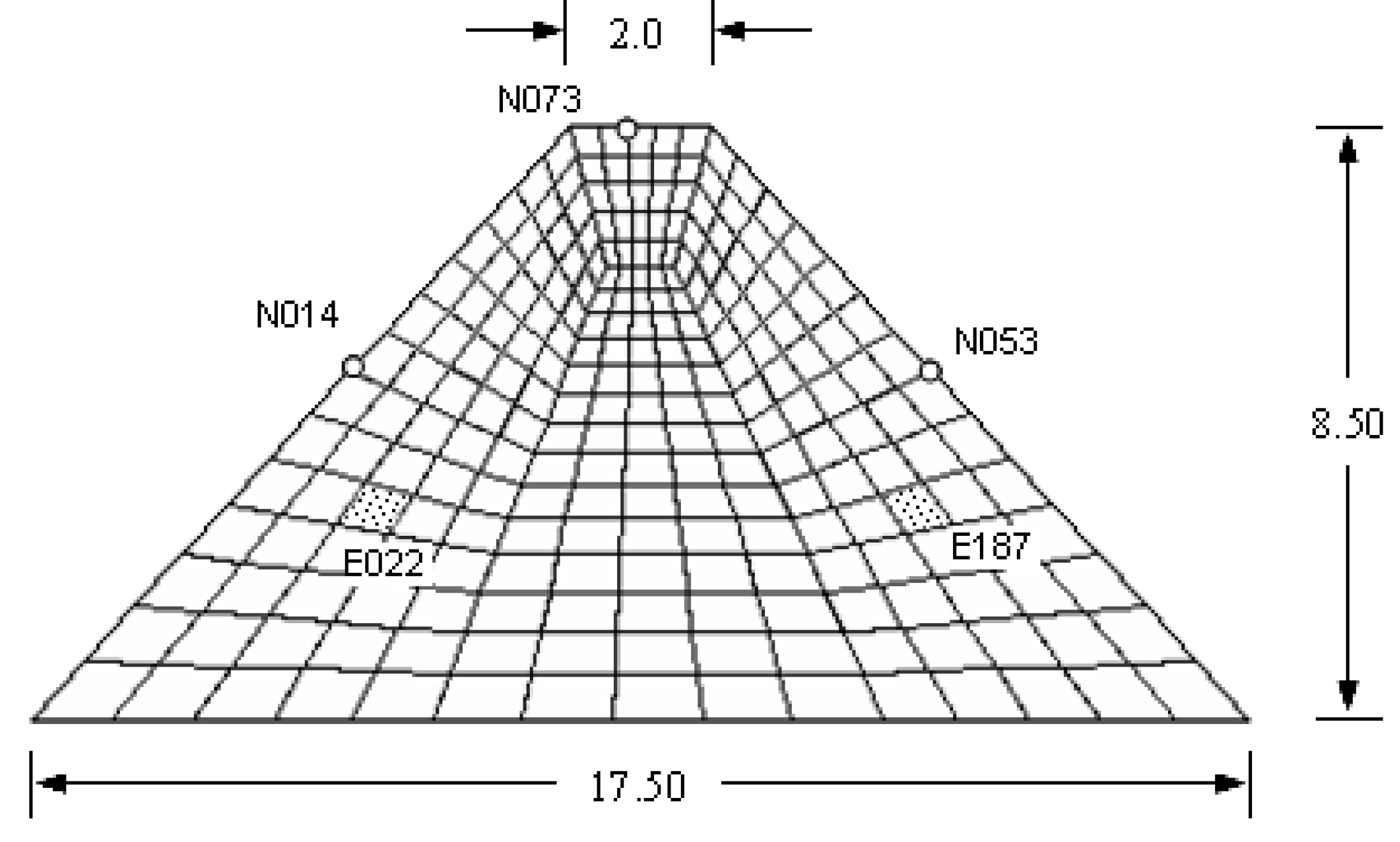
5.1. Finite Element Model
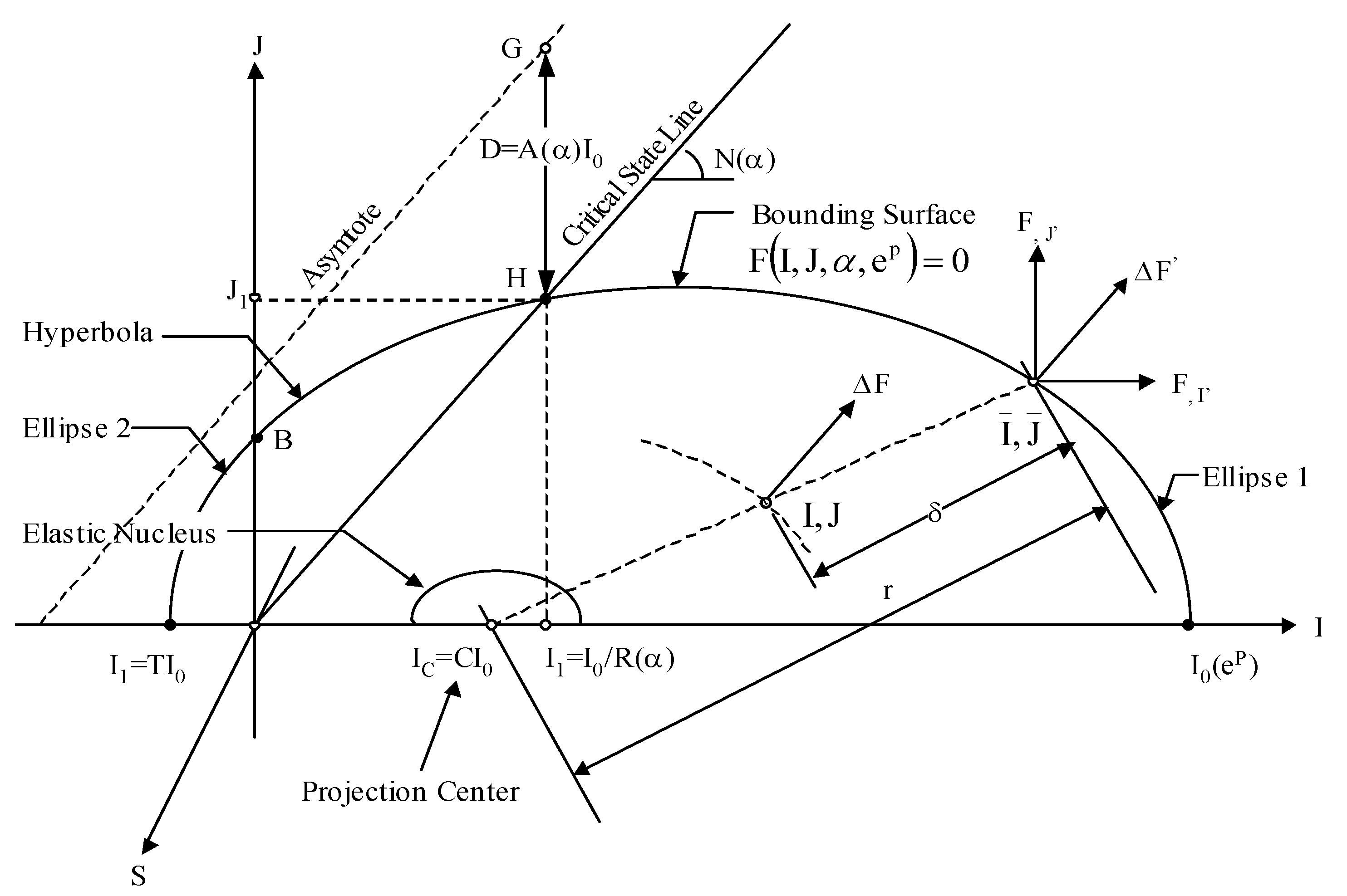
5.2. Constitutive models and model parameters
Stress–Strain Relationship of the Soil Skeleton
5.3. Soil Water Characteristic Curve (SWCC) and Model Parameters
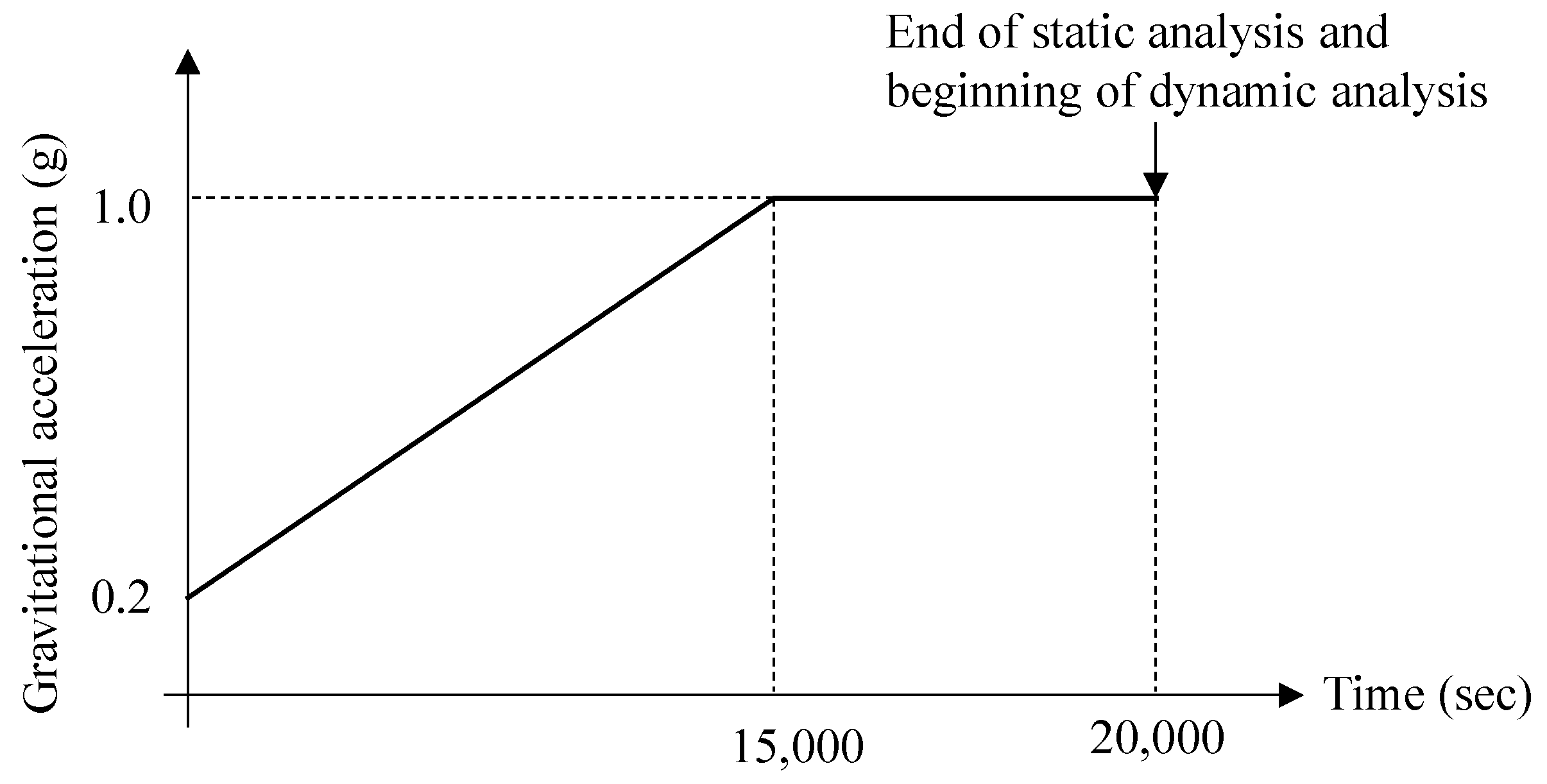
5.4. Static Analysis: Determination of the Initial Condition for Dynamic Analysis
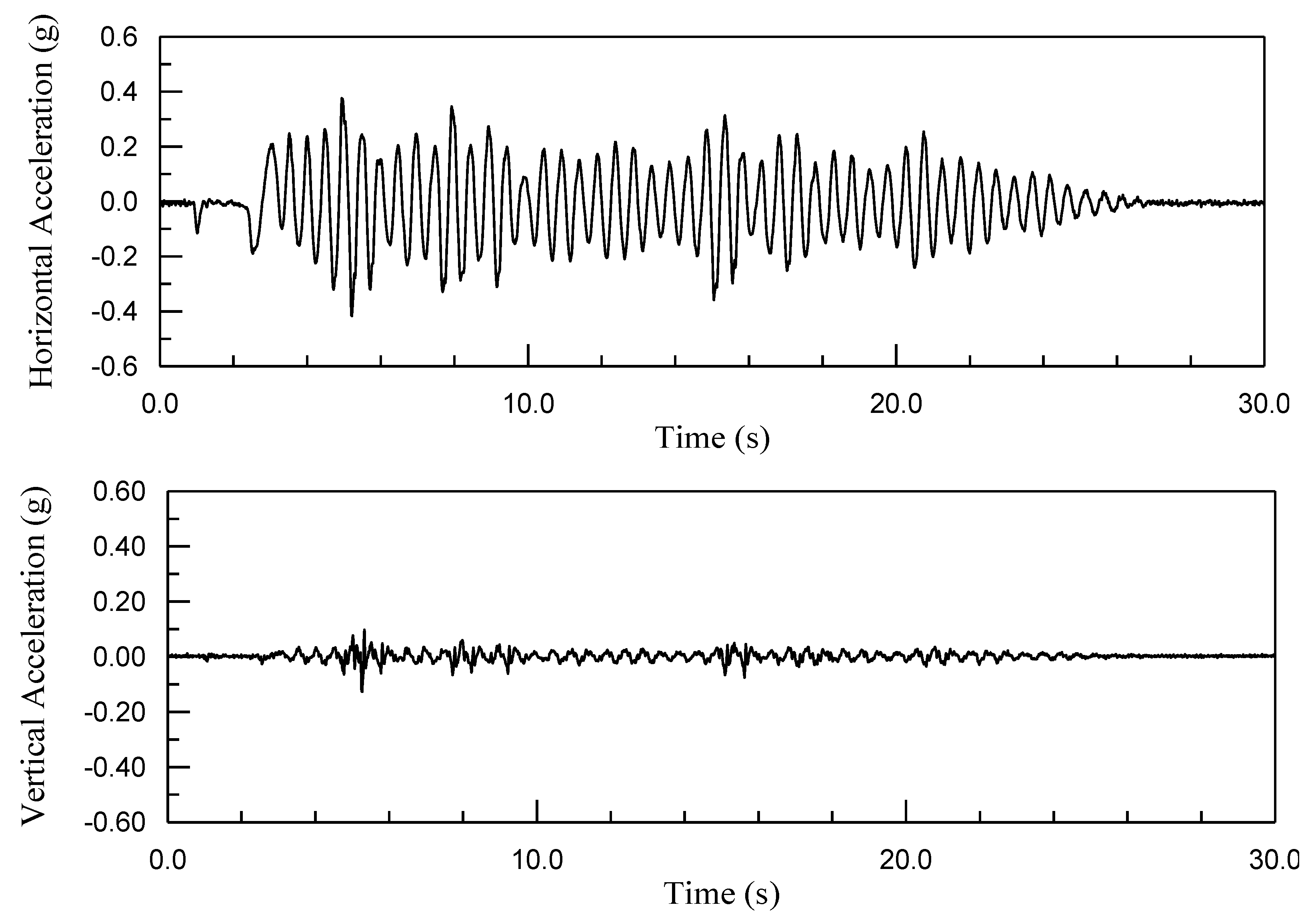
5.5. Dynamic Analysis
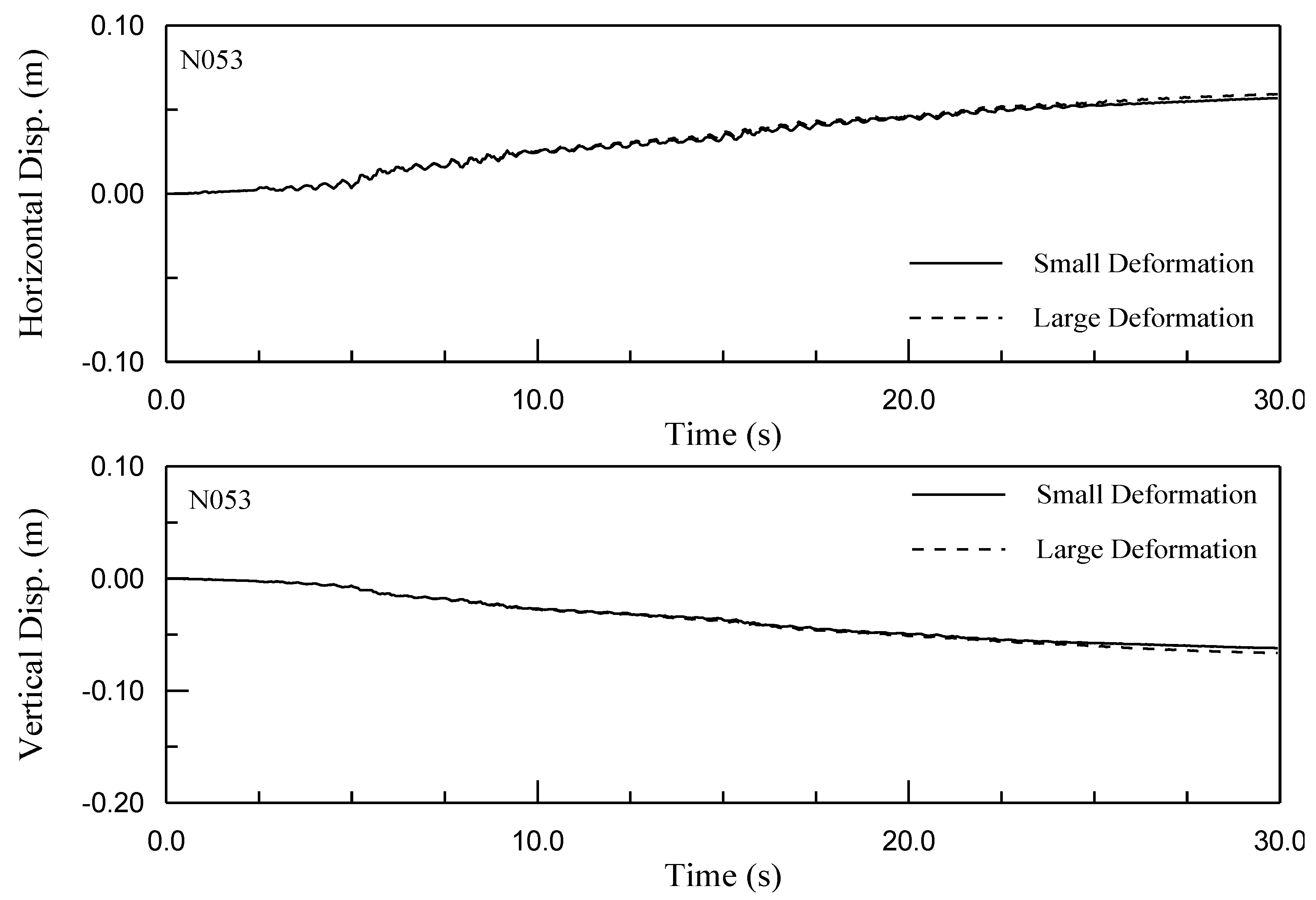
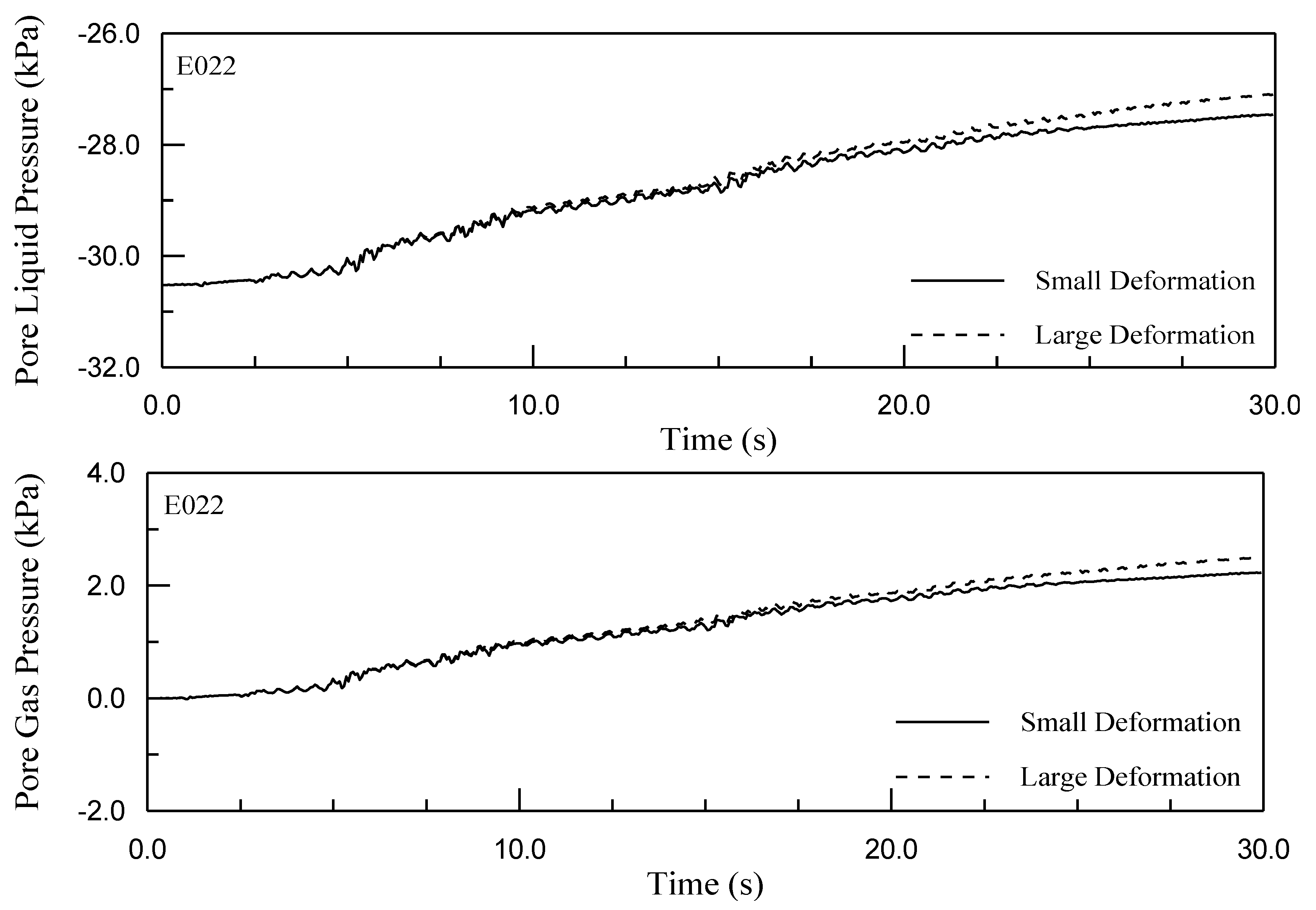
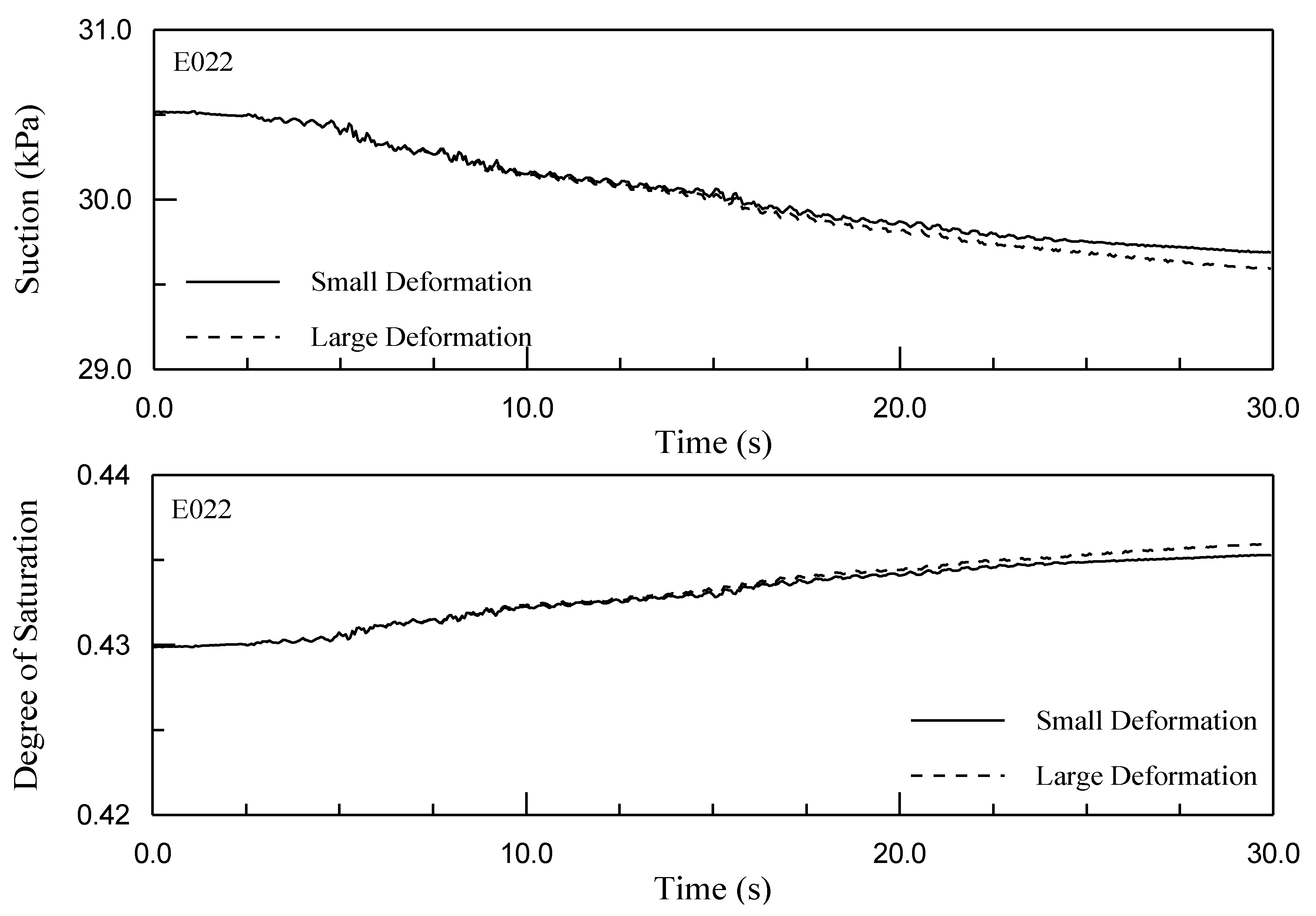
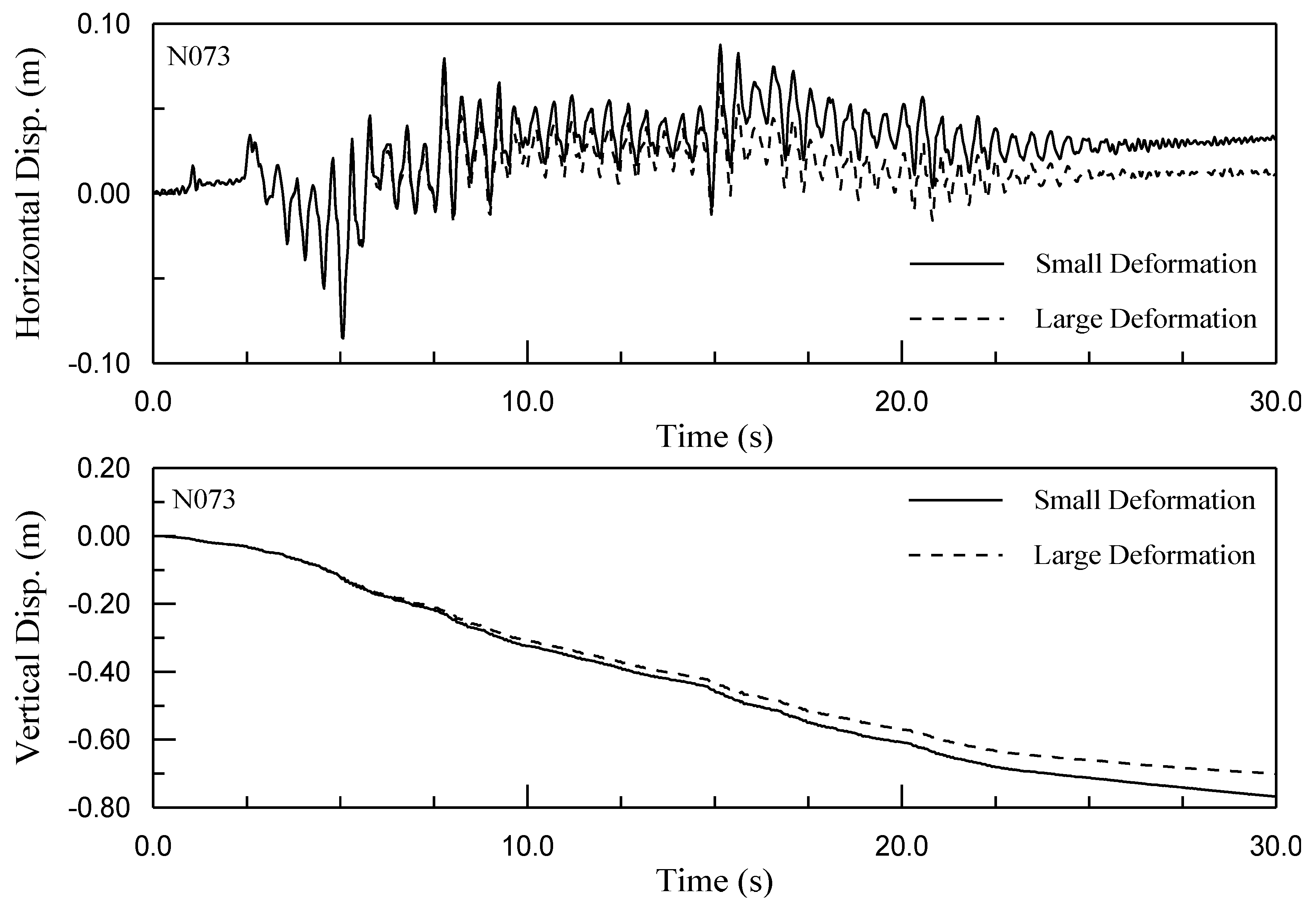
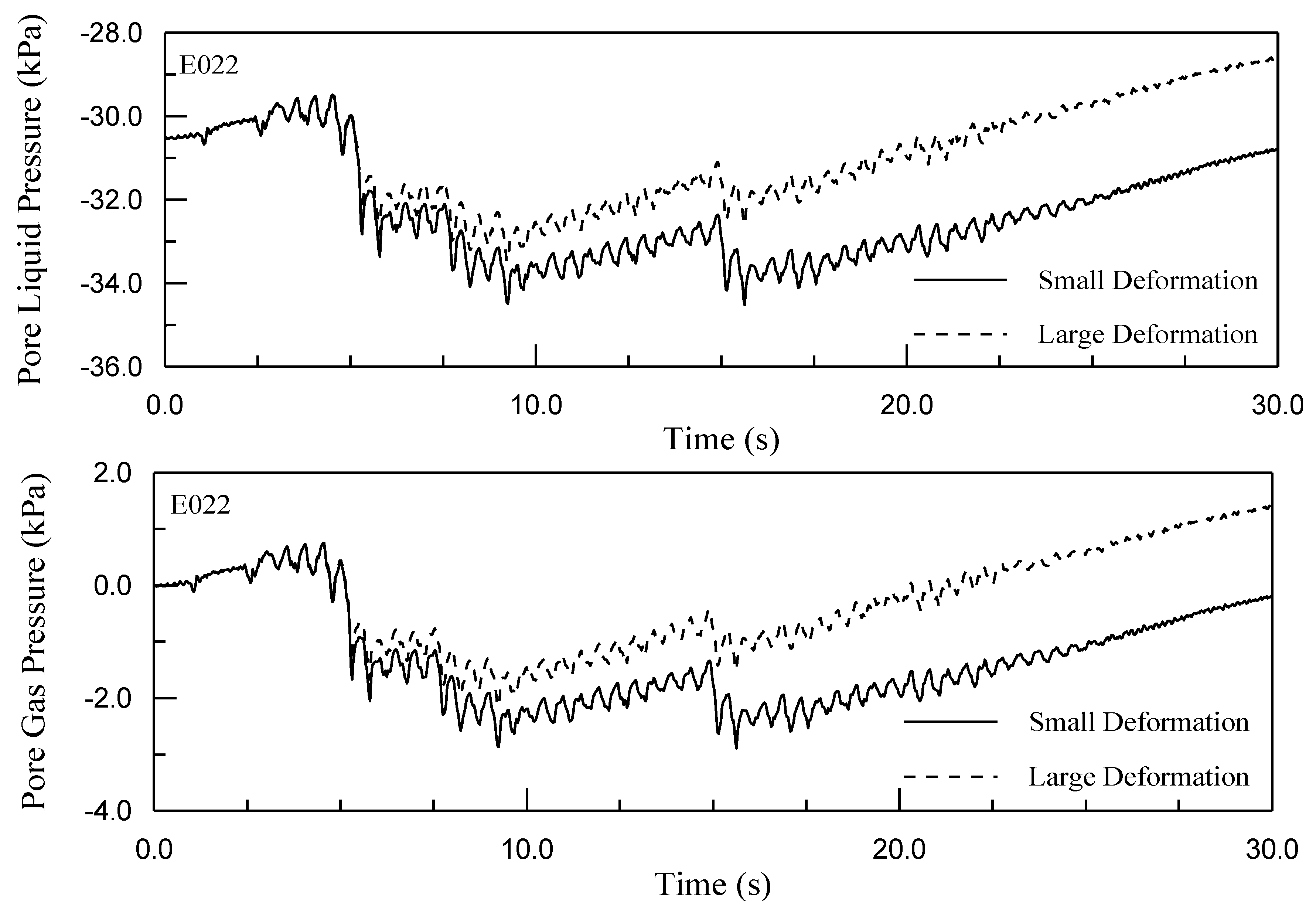
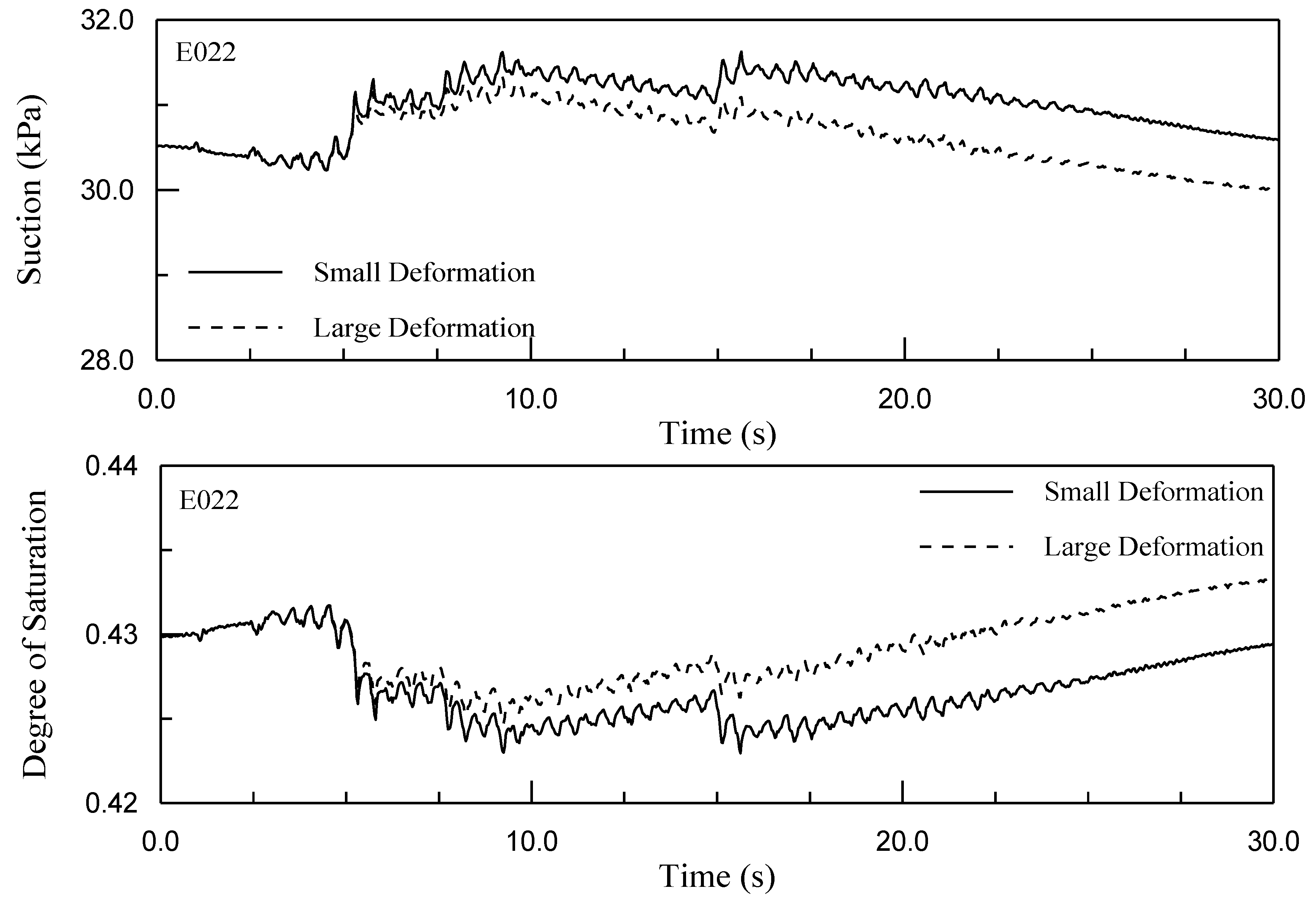
5.6. Comparison between Small and Large Deformation Analyses
5.7. Comparison of Computational Efficiency of Complete and Reduced Formulations
6. Concluding Remarks
- The large and small deformation theories for unsaturated soils were implemented within a finite element framework, and a large deformation analysis of the unsaturated soil was performed for the first time.
- The complete formulation for unsaturated soil was successfully solved for the first time. The effects of relative fluid accelerations and velocities on the overall behavior of unsaturated soils were estimated and compared. The reduced formulation is computationally efficient and numerically stable. It captures the overall behavior reasonably well for the soil considered in this study (Minco Silt) and can be used for the evaluation of earthquake effects on similar soils. However, caution should be exercised in using the reduced formulation for soils with larger permeability values.
- The small deformation analysis was observed to predict larger displacements compared to the large deformation analysis. Therefore, a large deformation analysis will likely produce an economical design of a geotechnical engineering structure.
- All predictions made by the computer code TeraDysac should be validated against experimental results. These validations are currently in progress.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fredlund, D.G.; Rahardjo, H. Soil Mechanics for Unsaturated Soils; A Wiley-Interscience Publication: New York, NY, USA; John Wiley and Sons, Inc.: New York, NY, USA, 1993; p. 517. ISBN 0-471-85008-X. [Google Scholar]
- Hassanizadeh, S.M.; Gray, W.G. General Conservation Equation for Multi-Phase System: 1. Averaging Procedure. Adv. Water Resour. 1979, 2, 131–144. [Google Scholar] [CrossRef]
- Schrefler, B.A.; Simoni, L.; Xikui, L.; Zienkiwicz, O.C. Mechanics of Partially Saturated Porous Media. In Numerical Methods and Constitutive Modelling in Geomechanics; Desai, C.S., Gioda, G., Eds.; CISM Lecture Notes; Springer: Wein, Vienna, 1990; pp. 169–209. [Google Scholar]
- Muraleetharan, K.K.; Wei, C.F. U_DYSAC2: Unsaturated Dynamic Soil Analysis Code for 2-dimensional Problems. In Computer Code; University of Oklahoma: Norman, OK, USA, 1999. [Google Scholar]
- Wei, C.F. Static and Dynamic Behavior of Multi-Phase Porous Media: Governing Equations and Finite Element Implementation. Ph.D. Dissertation, University of Oklahoma, Norman, OK, USA, August 2001. [Google Scholar]
- Zienkiewicz, O.C.; Taylor, R.L. The Finite Element Method, 5th ed.; Solid Mechanics, Butterworth-Heinemann Publication, Linacre House, Jordan Hill: Oxford, UK, 2000; Volume 2, p. 459. ISBN 0-7506-5055-9. [Google Scholar]
- Brezzi, F.; Fortin, M. Mixed and Hybrid Finite Element Methods; Springer: Berlin/Heidelberg, Germany; New York, NY, USA, 2000. [Google Scholar]
- Ravichandran, N. A Framework-Based Finite Element Approach to Solving Large Deformation Problems in Multiphase Porous media. Ph.D. Dissertation, School of Civil Engineering and Environmental Science, University of Oklahoma, Norman, Oklahoma, December 2005. [Google Scholar]
- Gadala, M.S.; Oravas, G.A.E.; Dokainish, M.A. A consistent eulerian formulation of large deformation problems in statics and dynamics. Int. J. Non-Linear Mech. 1983, 18, 21–35. [Google Scholar] [CrossRef]
- Sanavia, L.; Schrefler, B.A.; Steinmann, P. A formulation for unsaturated porous medium undergoing large inelastic strains. Comput. Mech. 2002, 28, 137–151. [Google Scholar] [CrossRef]
- Gawin, D.; Sanavia, L. A Unified Approach to Numerical Modeling of Fully and Partially Saturated Porous Materials by Considering Air Dissolved in Water. Comput. Model. Eng. Sci. 2009, 53, 255–302. [Google Scholar] [CrossRef]
- Bannmann, D.J.; Johnson, G.C. On the kinematics of finite deformation plasticity. Acta Mech. 1987, 70, 1–13. [Google Scholar] [CrossRef]
- Lee, E.H. Some comments on elastic-plastic analysis. Int. J. Solids Struct. 1981, 17, 859–872. [Google Scholar] [CrossRef]
- Lubarda, V.A.; Lee, E.H. A correct definition of elastic and plastic deformation and its computational significance. J. Appl. Mech. 1981, 48, 35–40. [Google Scholar] [CrossRef]
- Oñate, E.; Carbonell, J.M. Updated lagrangian mixed finite element formulation for quasi and fully incompressible fluids. Comput. Mech. 2014, 54, 1583–1596. [Google Scholar] [CrossRef]
- Wang, S.; Chester, S.A. Multi-physics modeling and finite element formulation of corneal uv cross-linking. Biomech. Modeling Mechanobiol. 2021, 20, 1561–1578. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Saito, K.; Kawasaki, H.; Holland, M.A. Orchestrated neuronal migration and cortical folding: A computational and experimental study. PLoS Comput. Biol. 2022, 18, e1010190. [Google Scholar] [CrossRef]
- Dafalias, Y.F.; Herrmann, L.R. Bounding Surface Plasticity II: Application to Isotropic Cohesive Soils. J. Eng. Mech. 1986, 112, 1260–1291. [Google Scholar] [CrossRef]
- Muraleetharan, K.K.; Nedunuri, P.R. A Bounding Surface Elastoplastic Constitutive Model for Monotonic and Cyclic Behavior of Unsaturated Soils. In Proceedings of the 12th Engineering Mechanics Conference, La Jolla, CA, USA, 17–20 May 1998; ASCE: Reston, VA, USA; pp. 1331–1334. [Google Scholar]
- Alonso, E.E.; Gens, A.; Josa, A.A. Constitutive Model for Partially Saturated Soils. Geotechnique 1990, 40, 405–430. [Google Scholar] [CrossRef]
- Wheeler, S.J.; Sivakumar, V. An Elasto-plastic Critical State Framework for Unsaturated Soil. Geotechnique 1995, 45, 35–53. [Google Scholar] [CrossRef]
- Wheeler, S.J. Inclusion of Specific Water Volume Within an Elasto-Plastic Model for Unsaturated Soil. Can. Geotech. J. 1996, 33, 42–57. [Google Scholar] [CrossRef]
- Ananthanathan, P. Laboratory Testing of Unsaturated Minco Silt. Master’s Thesis, University of Oklahoma, Norman, OK, USA, 2002. [Google Scholar]
- Vinayagam, T. Understanding the Stress-Strain Behavior of Unsaturated Minco Silt Using Laboratory Testing and Constitutive Modeling. Master’s Thesis, University of Oklahoma, Norman, OK, USA, 2004. [Google Scholar]
- Brooks, R.; Corey, A. Hydraulic Properties of Porous Media. In Hydrology Paper; Colorado State University: Fort Collins, Co, USA, 1964. [Google Scholar]
- Pepescu, R.; Prevost, J.H. Numerical Class A Prediction for Models Nos. 1, 2, 3, 4a, 4b, 6, 7, 11, &12. In Verification of Numerical Procedures for the Analysis of Soil Liquefaction Problems; Balkema: Rotterdam, The Netherlands, 1993; pp. 1105–1209. [Google Scholar]
- Lacy, S.J.; Prevost, J.H. Nonlinear Seismic Response Analysis of Earth Dams. J. Soil Dyn. Earthq. Eng. 1987, 6, 48–63. [Google Scholar] [CrossRef]
- Muraleetharan, K.K.; Mish, K.D.; Arulanandan, K. A Fully Coupled Nonlinear Dynamic Analysis Procedure and its Verification Using Centrifuge Test Results. Int. J. Numer. Anal. Methods Geomech. 1994, 18, 305–325. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Slope of virgin consolidation line in e-ln(p) plot, λ | 0.0954 |
| Slope of swelling line in e-log(p) plot, κ | 0.0103 |
| Slope of critical state line in compression, Mc | 1.2678 |
| Ratio of extension to compression for slope of critical state line, Me/Mc | 1.00 |
| Elastic shear modulus, G | 12.50 |
| Poisson ratio, ν | 0.20 |
| Mean net stress at which consolidation curve changes from linear in e-ln(p) space to linear in e-p space, PL | 33.80 |
| Shape parameter in compression corresponding to ellipse 1, Rc | 4.20 |
| Ratio of extension to compression of shape parameter corresponding to ellipse 1, Re/Rc | 1.00 |
| Shape parameter in compression corresponding to hyperbola, Ac | 0.05 |
| Ratio of extension to compression of shape parameter corresponding to hyperbola, Ae/Ac | 1.00 |
| Shape parameter corresponding to ellipse 2, T | 0.01 |
| Projection center, C | 0.00 |
| Elastic zone parameter, Sp | 1.00 |
| Positive model parameter, m | 0.02 |
| Degree of hardening in triaxial compression, Hc | 0.80 |
| Ratio of extension to compression for hardening parameter, He/Hc | 1.00 |
| Hardening parameter for states in immediate vicinity of I-axis, Ho | 1.000 |
| Suction-dependent parameter 1, m | 4.703 |
| Suction-dependent parameter 2, N | 1.780 |
| Suction-dependent parameter 3, A | 0.420 |
| Suction-dependent parameter 4, B | 0.089 |
| Parameter | Value |
|---|---|
| Dry density (kN/m3) | 14.14 |
| Parameter a | 5.5 |
| Parameter n | 0.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ravichandran, N.; Vickneswaran, T. Coupled Large Deformation Finite Element Formulations for the Dynamics of Unsaturated Soil and Their Application. Geosciences 2022, 12, 320. https://doi.org/10.3390/geosciences12090320
Ravichandran N, Vickneswaran T. Coupled Large Deformation Finite Element Formulations for the Dynamics of Unsaturated Soil and Their Application. Geosciences. 2022; 12(9):320. https://doi.org/10.3390/geosciences12090320
Chicago/Turabian StyleRavichandran, Nadarajah, and Tharshikka Vickneswaran. 2022. "Coupled Large Deformation Finite Element Formulations for the Dynamics of Unsaturated Soil and Their Application" Geosciences 12, no. 9: 320. https://doi.org/10.3390/geosciences12090320
APA StyleRavichandran, N., & Vickneswaran, T. (2022). Coupled Large Deformation Finite Element Formulations for the Dynamics of Unsaturated Soil and Their Application. Geosciences, 12(9), 320. https://doi.org/10.3390/geosciences12090320