

Automatic Tsunami Hazard Assessment System: “Tsunami Observer”
 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. General Description of the “Tsunami Observer” System
2.2. Calculation of Coseismic Displacements
2.3. Calculation of the Initial Elevation of the Water Surface at the Tsunami Source
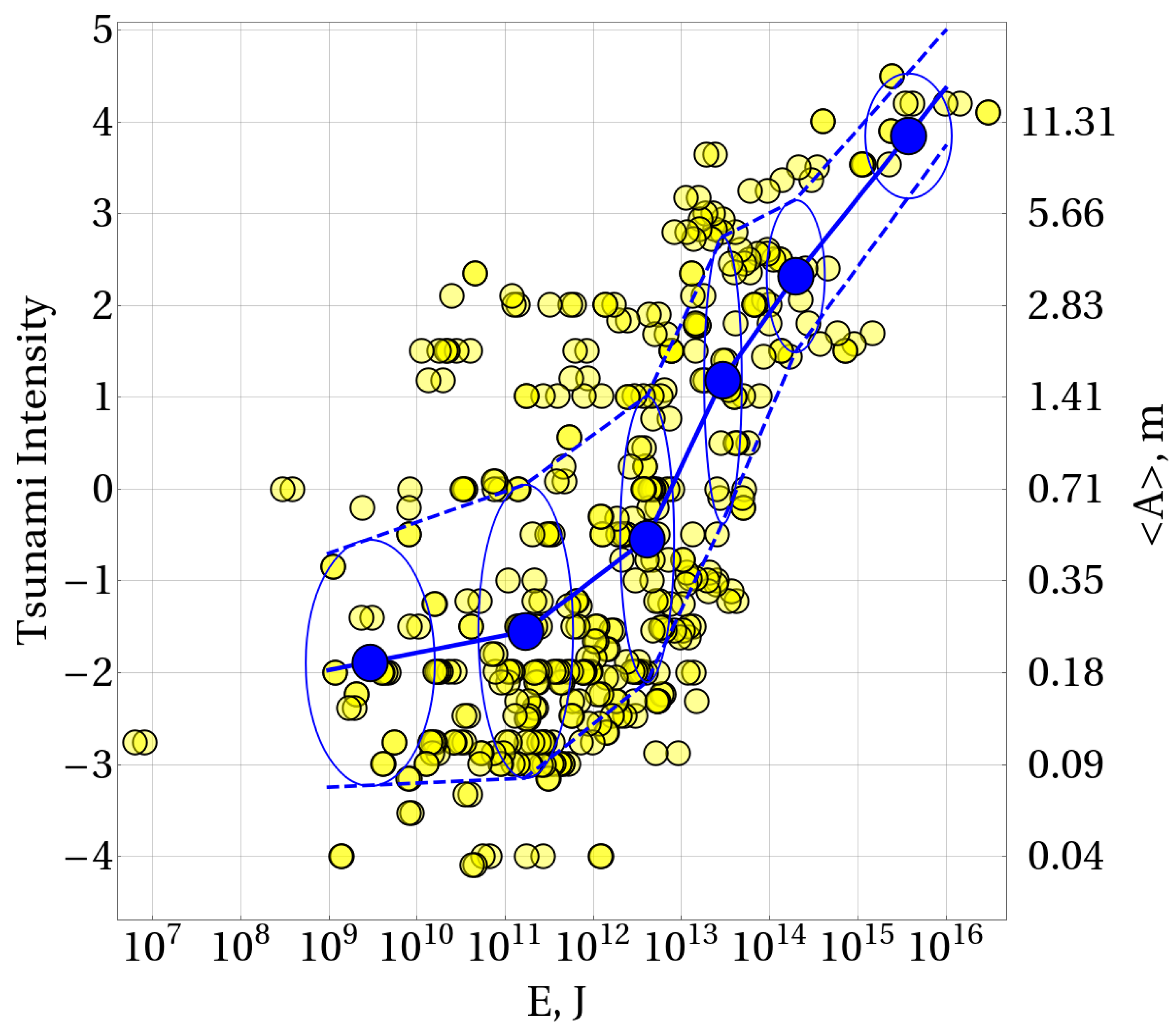
2.4. Assessment of Tsunami Intensity
2.5. Hydrodynamic Modeling of a Tsunami
3. Results
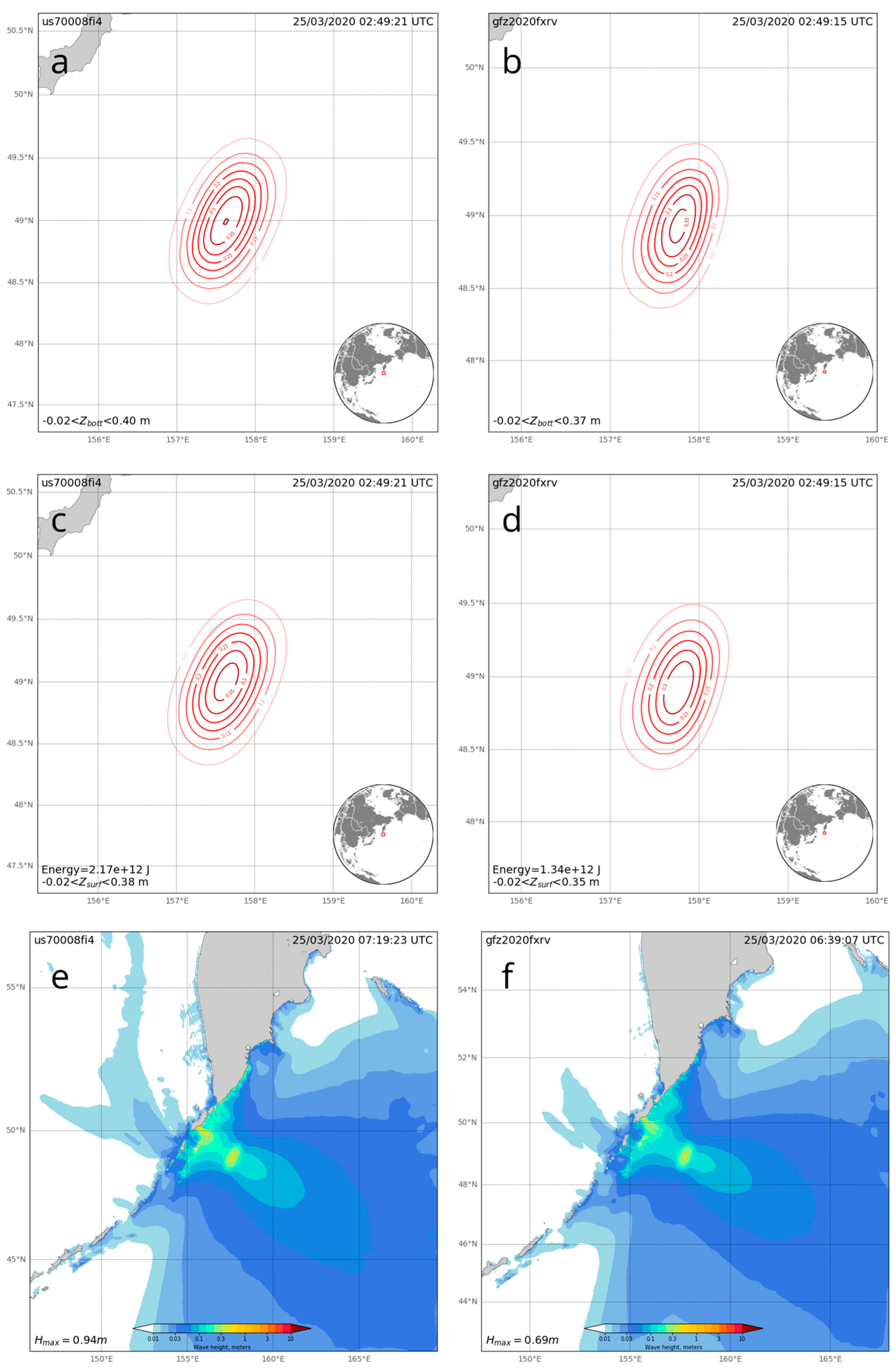
3.1. Example of the “Tsunami Observer” System’s Operation
3.2. Results of Operation of the “Tsunami Observer” System
4. Discussion
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- National Geophysical Data Center/World Data Service: NCEI/WDS Global Historical Tsunami Database; NOAA National Centers for Environmental Information: Asheville, NC, USA, 2022. [CrossRef]
- Bernard, E.; Titov, V. Evolution of tsunami warning systems and products. Phil. Trans. R. Soc. A 2015, 373, 20140371. [Google Scholar] [CrossRef] [PubMed]
- An, C.; Liu, H.; Ren, Z.; Yuan, Y. Prediction of tsunami waves by uniform slip models. J. Geophys. Res. Ocean 2018, 123, 8366–8382. [Google Scholar] [CrossRef]
- Chebrov, D.V. Processing center “Petropavlovsk” in seismic subsystem of Tsunami Warning System in Russian Far East in 2010–2018. Comput. Technol. 2019, 24, 120–135. (In Russian) [Google Scholar] [CrossRef]
- Papadopoulos, G.A.; Imamura, F.; Nosov, M.; Charalampakis, M. Tsunami magnitude scales. In Geological Records of Tsunamis and Other Extreme Waves; Engel, M., Pilarczyk, J., May, S.M., Brill, D., Garrett, E., Eds.; Elsevier: Amsterdam, The Netherlands, 2020; pp. 33–46. [Google Scholar]
- Selva, J.; Lorito, S.; Volpe, M.; Romano, F.; Tonini, R.; Perfetti, P.; Amato, A. Probabilistic tsunami forecasting for early warning. Nat. Commun. 2021, 12, 5677. [Google Scholar] [CrossRef]
- Okal, E.A. Tsunamigenic earthquakes: Past and present milestones. Pure Appl. Geophys. 2011, 168, 969–995. [Google Scholar] [CrossRef]
- Gusiakov, V.K. Magnitude-geographical criterion for operational tsunami prognosis: Analysis of application in 1958–2009. Seism. Instrum. 2010, 46, 5–21. (In Russian) [Google Scholar] [CrossRef]
- Tinti, S.; Graziani, L.; Brizuela, B.; Maramai, A.; Gallazzi, S. Applicability of the decision matrix of North Eastern Atlantic, Mediterranean and connected seas Tsunami Warning System to the Italian tsunamis. Nat. Hazards Earth Syst. Sci. 2012, 12, 843–857. [Google Scholar] [CrossRef]
- Hoshiba, M.; Ozaki, T. Earthquake Early Warning and Tsunami Warning of the Japan Meteorological Agency, and Their Performance in the 2011 off the Pacific Coast of Tohoku Earthquake Mw 9.0. In Early Warning for Geological Disasters; Springer: Berlin, Germany, 2014; pp. 1–28. [Google Scholar]
- Tang, L.; Titov, V.V.; Bernard, E.N.; Wei, Y.; Chamberlin, C.D.; Newman, J.C.; Mofjeld, H.O.; Arcas, D.; Eble, M.C.; Moore, C.; et al. Direct energy estimation of the 2011 Japan tsunami using deep-ocean pressure measurements. J. Geophys. Res. Ocean 2012, 117, C08008. [Google Scholar] [CrossRef]
- Kanamori, H. W phase. Geophys. Res. Lett. 1993, 20, 1691–1694. [Google Scholar] [CrossRef]
- Rivera, L.; Kanamori, H. Using W phase for regional tsunami warning and rapid earthquake hazard assessment. In Proceedings of the 2nd International Workshop on Earthquake Early Warning, Kyoto, Japan, 21–22 April 2009. [Google Scholar]
- Riquelme, S.; Bravo, F.; Melgar, D.; Benavente, R.; Geng, J.; Barrientos, S.; Campos, J. W phase source inversion using high-rate regional GPS data for large earthquakes. Geophys. Res. Lett. 2016, 43, 3178–3185. [Google Scholar] [CrossRef]
- Riquelme, S.; Medina, M.; Bravo, F.; Barrientos, S.; Campos, J.; Cisternas, A. W-phase real-time implementation and network expansion from 2012 to 2017: The experience in Chile. Seismol. Res. Lett. 2018, 89, 2237–2248. [Google Scholar] [CrossRef]
- Hirshorn, B.; Weinstein, S.; Wang, D.; Koyanagi, K.; Becker, N.; McCreery, C. Earthquake Source Parameters: Rapid Estimates for Tsunami Forecasts and Warnings. In Complexity in Tsunamis, Volcanoes, and their Hazards; Tilling, R.I., Ed.; Springer US: New York, NY, USA, 2022; pp. 299–333. [Google Scholar] [CrossRef]
- Yokota, Y.; Ishikawa, T.; Watanabe, S.I. Seafloor crustal deformation data along the subduction zones around Japan obtained by GNSS-A observations. Sci. Data 2018, 5, 180182. [Google Scholar] [CrossRef] [PubMed]
- Larson, K.M.; Bodin, P.; Gomberg, J. Using 1-Hz GPS data to measure deformations caused by the Denali fault earthquake. Science 2003, 300, 1421–1424. [Google Scholar] [CrossRef] [PubMed]
- Langbein, J.; Bock, Y. High-rate real-time GPS network at Parkfield: Utility for detecting fault slip and seismic displacements. Geophys. Res. Lett. 2004, 31, L15S20. [Google Scholar] [CrossRef]
- Wright, T.J.; Houlié, N.; Hildyard, M.; Iwabuchi, T. Real-time, reliable magnitudes for large earthquakes from 1 Hz GPS precise point positioning: The 2011 Tohoku-Oki (Japan) earthquake. Geophys. Res. Lett. 2012, 39, L12302. [Google Scholar] [CrossRef]
- Grapenthin, R.; Johanson, I.; Allen, R.M. The 2014 Mw 6.0 Napa earthquake, California: Observations from real-time GPS-enhanced earthquake early warning. Geophys. Res. Lett. 2014, 41, 8269–8276. [Google Scholar] [CrossRef]
- Minson, S.E.; Murray, J.R.; Langbein, J.O.; Gomberg, J.S. Real-time inversions for finite fault slip models and rupture geometry based on high-rate GPS data. J. Geophys. Res. Solid Earth 2014, 119, 3201–3231. [Google Scholar] [CrossRef]
- Crowell, B.W.; Schmidt, D.A.; Bodin, P.; Vidale, J.E.; Baker, B.; Barrientos, S.; Geng, J. G-FAST earthquake early warning potential for great earthquakes in Chile. Seismol. Res. Lett. 2018, 89, 542–556. [Google Scholar] [CrossRef]
- Kawamoto, S.; Ohta, Y.; Hiyama, Y.; Todoriki, M.; Nishimura, T.; Furuya, T.; Sato, Y.; Yahagi, T.; Miyagawa, K. REGARD: A new GNSS-based real-time finite fault modeling system for GEONET. J. Geophys. Res. Solid Earth 2017, 122, 1324–1349. [Google Scholar] [CrossRef]
- Käufl, P.; Valentine, A.P.; O’Toole, T.B.; Trampert, J. A framework for fast probabilistic centroid-moment-tensor determination—Inversion of regional static displacement measurements. Geophys. J. Int. 2014, 196, 1676–1693. [Google Scholar] [CrossRef]
- Melgar, D.; Bock, Y.; Crowell, B.W. Real-time centroid moment tensor determination for large earthquakes from local and regional displacement records. Geophys. J. Int. 2012, 188, 703–718. [Google Scholar] [CrossRef]
- O’Toole, T.B.; Valentine, A.P.; Woodhouse, J.H. Earthquake source parameters from GPS-measured static displacements with potential for real-time application. Geophys. Res. Lett. 2013, 40, 60–65. [Google Scholar] [CrossRef]
- Miyazaki, S.I.; Larson, K.M.; Choi, K.; Hikima, K.; Koketsu, K.; Bodin, P.; Haase, J.; Emore, G.; Yamagiwa, A. Modeling the rupture process of the 2003 September 25 Tokachi-Oki (Hokkaido) earthquake using 1-Hz GPS data. Geophys. Res. Lett. 2004, 31, L21603. [Google Scholar] [CrossRef]
- Langbein, J.; Borcherdt, R.; Dreger, D.; Fletcher, J.; Hardebeck, J.L.; Hellweg, M.; Ji, C.; Johnston, M.; Murray, J.R.; Nadeau, R.; et al. Preliminary report on the 28 September 2004, M 6.0 Parkfield, California earthquake. Seismol. Res. Lett. 2005, 76, 10–26. [Google Scholar] [CrossRef]
- Melgar, D.; Crowell, B.W.; Bock, Y.; Haase, J.S. Rapid modeling of the 2011 Mw 9.0 Tohoku-Oki earthquake with seismogeodesy. Geophys. Res. Lett. 2013, 40, 2963–2968. [Google Scholar] [CrossRef]
- Titov, V.V.; González, F.I.; Bernard, E.N.; Eble, M.C.; Mofjeld, H.O.; Newman, J.C.; Venturato, A.J. Real-time tsunami forecasting: Challenges and solutions. Nat. Hazards 2005, 35, 35–41. [Google Scholar] [CrossRef]
- Bernard, E.; Titov, V. Improving tsunami forecast skill using deep ocean observations. Mar. Technol. Soc. J. 2006, 40, 86–89. [Google Scholar] [CrossRef]
- Nosov, M.A.; Grigorieva, S.S. Tsunami forecasting based on deepwater-station data. Mosc. Univ. Phys. Bull. 2015, 70, 326–332. [Google Scholar] [CrossRef]
- Gusman, A.R.; Sheehan, A.F.; Satake, K.; Heidarzadeh, M.; Mulia, I.E.; Maeda, T. Tsunami data assimilation of Cascadia seafloor pressure gauge records from the 2012 Haida Gwaii earthquake. Geophys. Res. Lett. 2016, 43, 4189–4196. [Google Scholar] [CrossRef]
- Wang, Y.; Tsushima, H.; Satake, K.; Navarrete, P. Review on recent progress in near-field tsunami forecasting using offshore tsunami measurements: Source inversion and data assimilation. Pure Appl. Geophys. 2021, 178, 5109–5128. [Google Scholar] [CrossRef]
- Levin, B.W.; Nosov, M.A. Physics of Tsunamis, 2nd ed.; Springer International Publishing AG: Cham, Switzerland, 2016; 388p. [Google Scholar]
- Saito, T. Tsunami Generation and Propagation; Springer: Tokyo, Japan, 2019; 265p. [Google Scholar]
- Sementsov, K.A.; Nosov, M.A.; Kolesov, S.V.; Karpov, V.A.; Matsumoto, H.; Kaneda, Y. Free gravity waves in the ocean excited by seismic surface waves: Observations and numerical simulations. J. Geophys. Res. Ocean 2019, 124, 8468–8484. [Google Scholar] [CrossRef]
- Lotto, G.C.; Nava, G.; Dunham, E.M. Should tsunami simulations include a nonzero initial horizontal velocity? Earth Planets Space 2017, 69, 1–14. [Google Scholar] [CrossRef]
- Saito, T. Tsunami generation: Validity and limitations of conventional theories. Geophys. J. Int. 2017, 210, 1888–1900. [Google Scholar] [CrossRef]
- Ji, C.; Wald, D.J.; Helmberger, D.V. Source description of the 1999 Hector Mine, California, earthquake, part I: Wavelet domain inversion theory and resolution analysis. Bull. Seismol. Soc. Am. 2002, 92, 1192–1207. [Google Scholar] [CrossRef]
- Ammon, C.J.; Ji, C.; Thio, H.K.; Robinson, D.; Ni, S.; Hjorleifsdottir, V.; Wald, D. Rupture process of the 2004 Sumatra-Andaman earthquake. Science 2005, 308, 1133–1139. [Google Scholar] [CrossRef] [PubMed]
- Shao, G.; Li, X.; Ji, C.; Maeda, T. Focal mechanism and slip history of the 2011 Mw 9.1 off the Pacific coast of Tohoku Earthquake, constrained with teleseismic body and surface waves. Earth Planets Space 2011, 63, 559–564. [Google Scholar] [CrossRef]
- Tomita, F.; Iinuma, T.; Ohta, Y.; Hino, R.; Kido, M.; Uchida, N. Improvement on spatial resolution of a coseismic slip distribution using postseismic geodetic data through a viscoelastic inversion. Earth Planets Space 2020, 72, 1–24. [Google Scholar] [CrossRef]
- Okada, Y. Surface deformation due to shear and tensile faults in a half-space. Bull. Seismol. Soc. Am. 1985, 75, 1135–1154. [Google Scholar] [CrossRef]
- Leonard, M. Earthquake fault scaling: Self-consistent relating of rupture length, width, average displacement, and moment release. Bull. Seismol. Soc. Am. 2010, 100, 1971–1988. [Google Scholar] [CrossRef]
- Kanamori, H.; Brodsky, E.E. The physics of earthquakes. Rep. Prog. Phys. 2004, 67, 1429. [Google Scholar] [CrossRef]
- Tanioka, Y.; Satake, K. Tsunami generation by horizontal displacement of ocean bottom. Geophys. Res. Lett. 1996, 23, 861–864. [Google Scholar] [CrossRef]
- Nosov, M.A.; Bolshakova, A.V.; Kolesov, S.V. Displaced water volume, potential energy of initial elevation, and tsunami intensity: Analysis of recent tsunami events. Pure Appl. Geophys. 2014, 171, 3515–3525. [Google Scholar] [CrossRef]
- Bolshakova, A.V.; Nosov, M.A.; Kolesov, S.V. The properties of co-seismic deformations of the ocean bottom as indicated by the slip-distribution data in tsunamigenic earthquake sources. Mosc. Univ. Phys. Bull. 2015, 70, 62–67. [Google Scholar] [CrossRef]
- Saito, T.; Kubota, T. Tsunami modelling for the deep sea and inside focal areas. Annu. Rev. Earth Planet. Sci. 2020, 48, 121–145. [Google Scholar] [CrossRef]
- Kajiura, K. The leading wave of a tsunami. Bull. Earthq. Res. Inst. Univ. Tokyo 1963, 41, 535–571. [Google Scholar]
- Tanioka, Y.; Seno, T. Sediment effect on tsunami generation of the 1896 Sanriku tsunami earthquake. Geophys. Res. Lett. 2001, 28, 3389–3392. [Google Scholar] [CrossRef]
- Saito, T.; Furumura, T. Three-dimensional tsunami generation simulation due to sea-bottom deformation and its interpretation based on the linear theory. Geophys. J. Int. 2009, 178, 877–888. [Google Scholar] [CrossRef]
- Nosov, M.A.; Kolesov, S.V. Optimal initial conditions for simulation of seismotectonic tsunamis. Pure Appl. Geophys. 2011, 168, 1223–1237. [Google Scholar] [CrossRef]
- Nosov, M.A.; Sementsov, K.A. Calculation of the initial elevation at the tsunami source using analytical solutions. Izv. Atmos. Ocean. Phys. 2014, 50, 539–546. [Google Scholar] [CrossRef]
- Okal, E.A.; Synolakis, C.E. A theoretical comparison of tsunamis from dislocations and landslides. Pure Appl. Geophys. 2003, 160, 2177–2188. [Google Scholar] [CrossRef]
- Gusiakov, V.K. Tsunami history: Recorded. Sea 2009, 15, 23–53. [Google Scholar]
- Okal, E.A. Use of the mantle magnitude M m for the reassessment of the moment of historical earthquakes. Pure Appl. Geophys. 1992, 139, 17–57. [Google Scholar] [CrossRef]
- Kikuchi, M.; Fukao, Y. Inversion of long-period P-waves from great earthquakes along subduction zones. Tectonophysics 1987, 144, 231–247. [Google Scholar] [CrossRef]
- Ma, K.F.; Kanamori, H.; Satake, K. Mechanism of the 1975 Kalapana, Hawaii, earthquake inferred from tsunami data. J. Geophys. Res. Solid Earth 1999, 104, 13153–13167. [Google Scholar] [CrossRef]
- Okal, E.A. Seismic parameters controlling far-field tsunami amplitudes: A review. Nat. Hazards 1988, 1, 67–96. [Google Scholar] [CrossRef]
- Tichelaar, B.W.; Ruff, L.J. Depth of seismic coupling along subduction zones. J. Geophys. Res. Solid Earth 1993, 98, 2017–2037. [Google Scholar] [CrossRef]
- Johnson, J.M.; Satake, K. Estimation of seismic moment and slip distribution of the 1 April 1946, Aleutian tsunami earthquake. J. Geophys. Res. Solid Earth 1997, 102, 11765–11774. [Google Scholar] [CrossRef]
- Johnson, J.M.; Satake, K. Asperity Distribution of the 1952 Great Kamchatka Earthquake and its Relation to Future Earthquake Potential in Kamchatka. In Seismogenic and Tsunamigenic Processes in Shallow Subduction Zones. Pageoph Topical Volumes; Sauber, J., Dmowska, R., Eds.; Birkhäuser: Basel, Switzerland, 1999; pp. 541–553. [Google Scholar] [CrossRef]
- Barrientos, S.E.; Ward, S.N. The 1960 Chile earthquake: Inversion for slip distribution from surface deformation. Geophys. J. Int. 1990, 103, 589–598. [Google Scholar] [CrossRef]
- Kämpf, J. Ocean Modelling for Beginners: Using Open-Source Software; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Dogan, G.G.; Yalciner, A.C.; Yuksel, Y.; Ulutaş, E.; Polat, J.; Güler, I.; Şahin, C.; Tarih, A.; Kânoğlu, U. The 30 October 2020 Aegean Sea Tsunami: Post-Event Field Survey Along Turkish Coast. Pure Appl. Geophys. 2021, 178, 785–812. [Google Scholar] [CrossRef]
- Kalligeris, N.; Skanavis, V.; Charalampakis, M.; Melis, N.S.; Voukouvalas, E.; Annunziato, A.; Synolakis, C.E. Field survey of the 30 October 2020 Samos (Aegean Sea) tsunami in the Greek islands. Bull. Earthq. Eng 2021, 1–33. [Google Scholar] [CrossRef]
- Aksoy, M.E. Post-event field observations in the İzmir-Sığacık village for the tsunami of the 30 October 2020 Samos (Greece) Mw 6.9 earthquake. Acta Geophys. 2021, 69, 1113–1125. [Google Scholar] [CrossRef]
- Riquelme, S.; Fuentes, M.; Hayes, G.P.; Campos, J. A rapid estimation of near-field tsunami runup. J. Geophys. Res. Solid Earth 2015, 120, 6487–6500. [Google Scholar] [CrossRef]
- Melgar, D.; Williamson, A.L.; Salazar-Monroy, E.F. Differences between heterogenous and homogenous slip in regional tsunami hazards modelling. Geophys. J. Int. 2019, 219, 553–562. [Google Scholar] [CrossRef]
- Nosov, M.A. Adapting a mesh when simulating tsunami waves. Math. Models Comput. Simul. 2018, 10, 431–440. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kolesov, S.V.; Nosov, M.A.; Sementsov, K.A.; Bolshakova, A.V.; Nurislamova, G.N. Automatic Tsunami Hazard Assessment System: “Tsunami Observer”. Geosciences 2022, 12, 455. https://doi.org/10.3390/geosciences12120455
Kolesov SV, Nosov MA, Sementsov KA, Bolshakova AV, Nurislamova GN. Automatic Tsunami Hazard Assessment System: “Tsunami Observer”. Geosciences. 2022; 12(12):455. https://doi.org/10.3390/geosciences12120455
Chicago/Turabian StyleKolesov, Sergey V., Mikhail A. Nosov, Kirill A. Sementsov, Anna V. Bolshakova, and Gulnaz N. Nurislamova. 2022. "Automatic Tsunami Hazard Assessment System: “Tsunami Observer”" Geosciences 12, no. 12: 455. https://doi.org/10.3390/geosciences12120455
APA StyleKolesov, S. V., Nosov, M. A., Sementsov, K. A., Bolshakova, A. V., & Nurislamova, G. N. (2022). Automatic Tsunami Hazard Assessment System: “Tsunami Observer”. Geosciences, 12(12), 455. https://doi.org/10.3390/geosciences12120455