
A Segmentation Approach to Identify Underwater Dunes from Digital Bathymetric Models



Abstract
:1. Introduction
2. Advanced Geomorphometry Analysis
2.1. Geomorphometry
2.2. OBIA
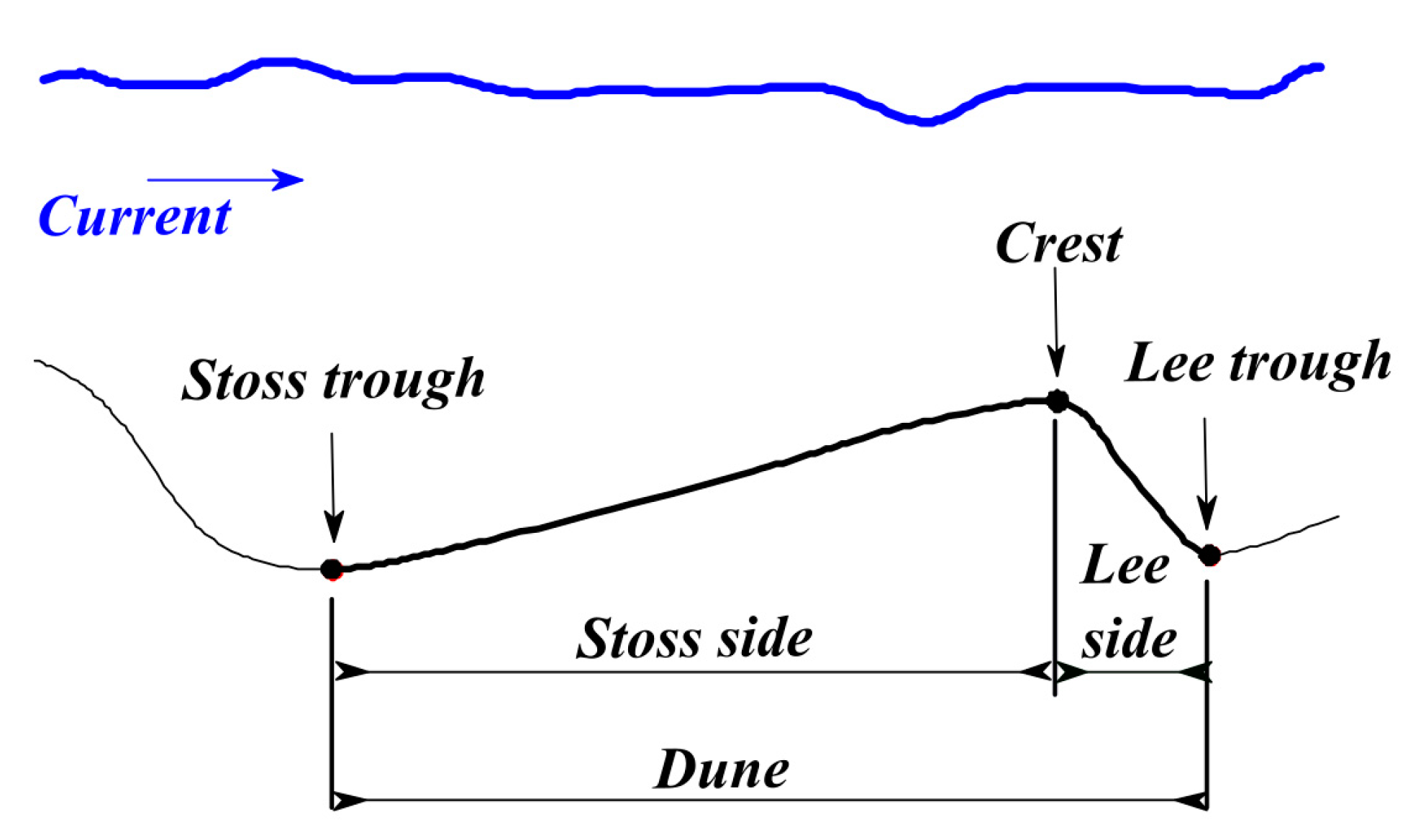
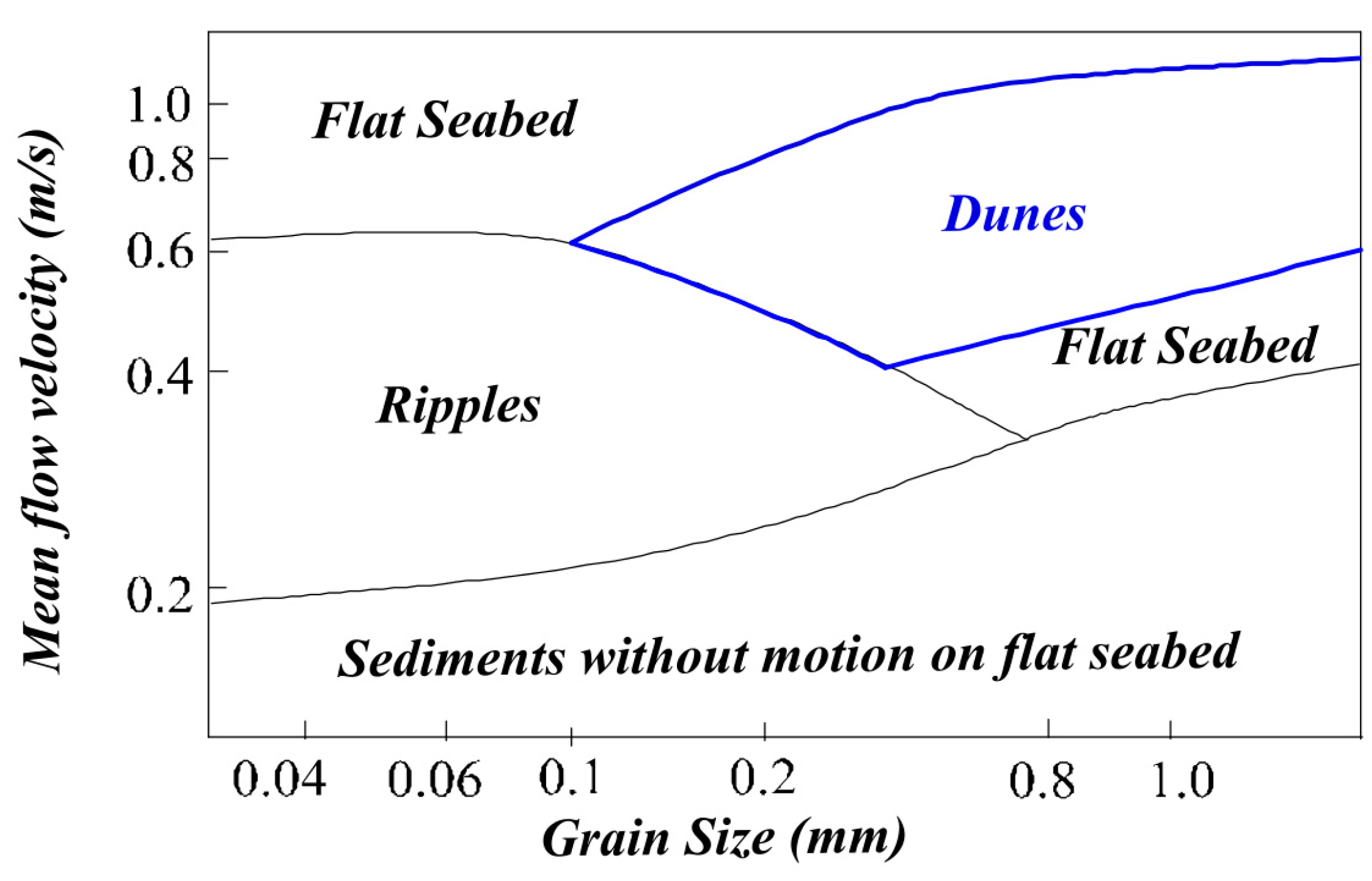
3. Description of the Underwater Dunes
4. Underwater Dune Segmentation from a DBM
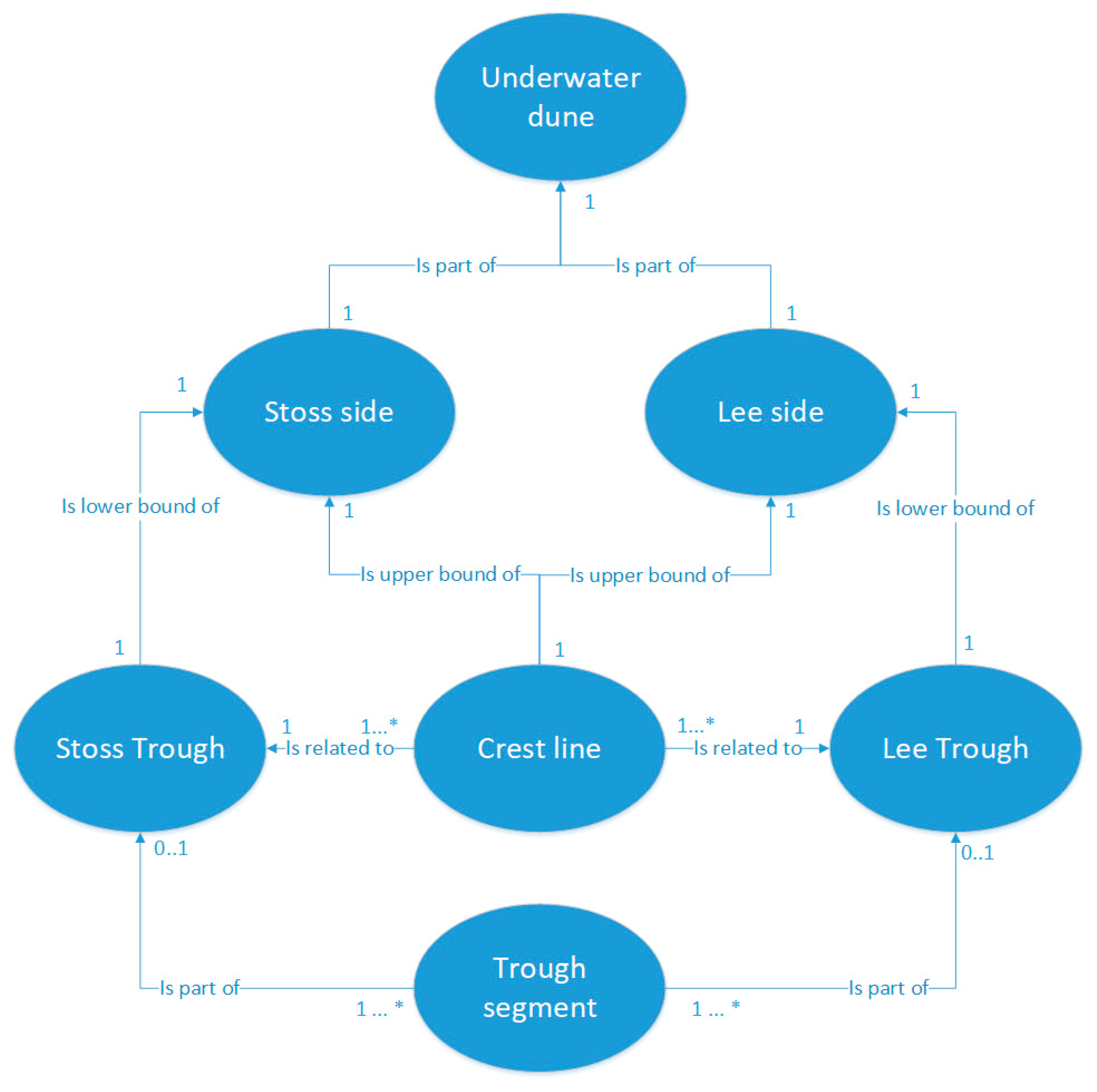
4.1. Underwater Dunes Conceptual Model
4.2. Operational Model
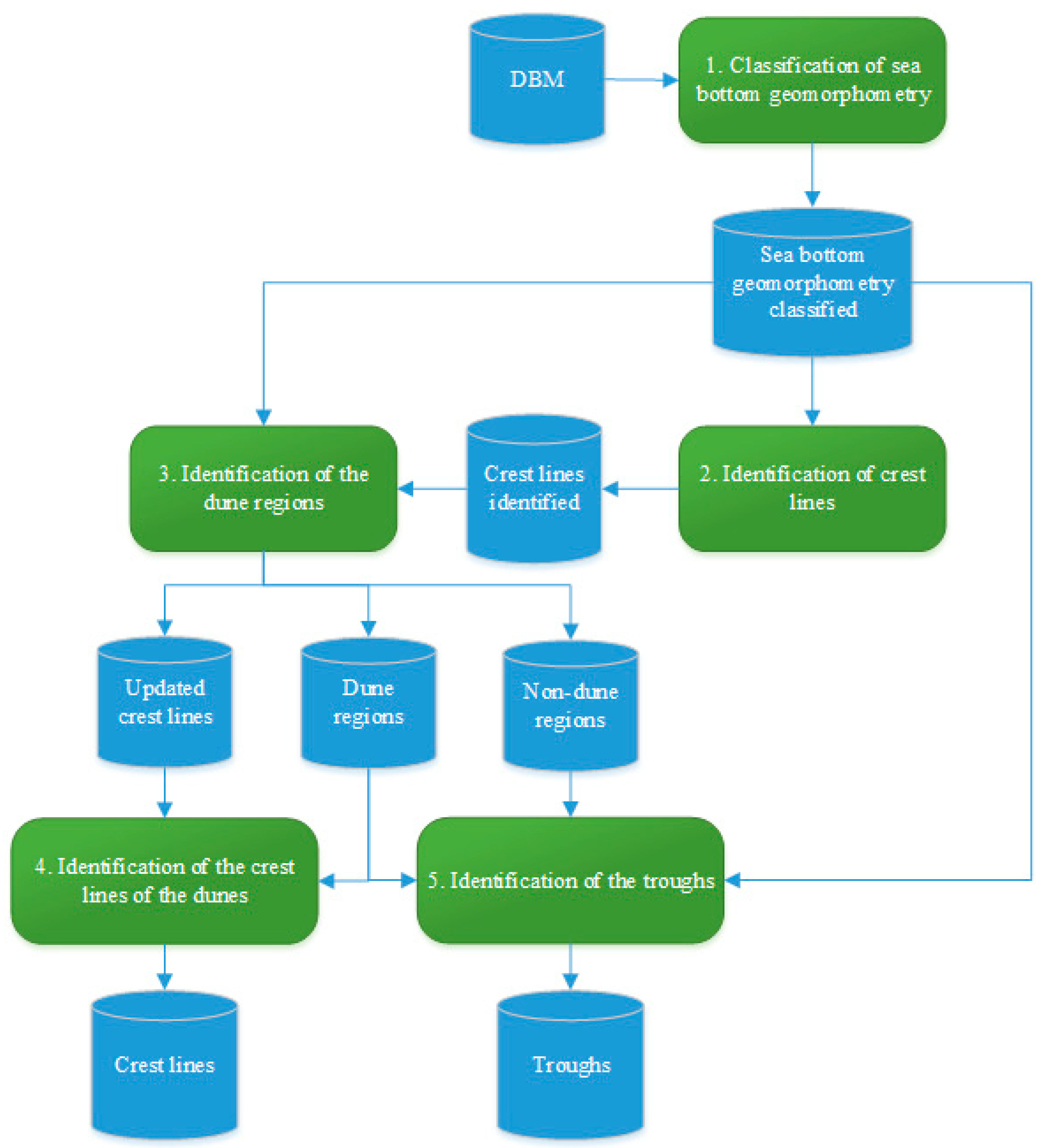
4.2.1. Phase I—Salient Features Identification
- Pixel-based classification of the sea bottom geomorphometry;
- Identification of the crest lines;
- Identification of the dune and non-dune regions;
- Improvement of the crest lines of the dune regions;
- Identification of the troughs.
A. Pixel-Based Classification of Sea Bottom Geomorphometry
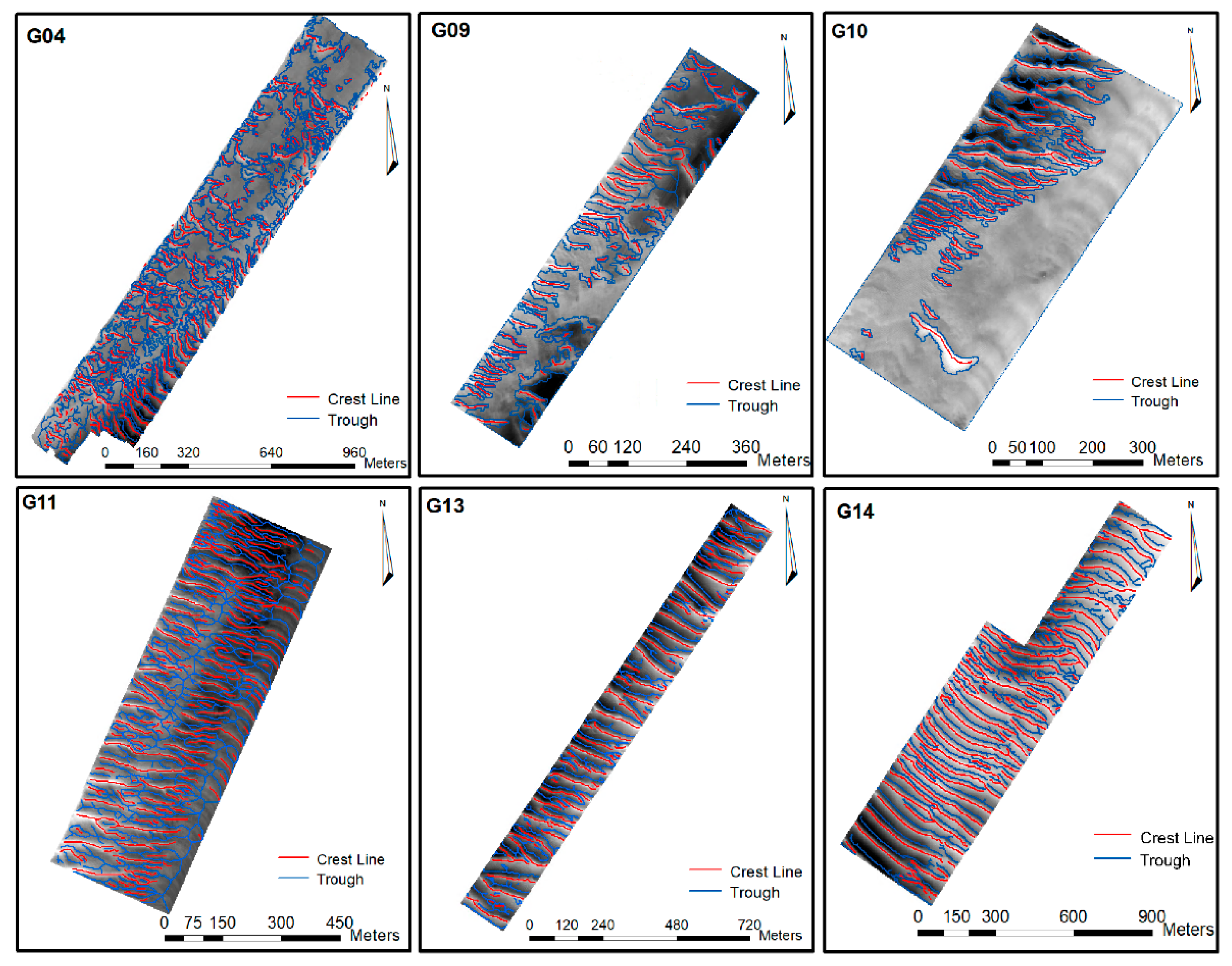
B. Identification of Crest Lines
C. Identification of the Dune and Non-Dune Regions
D. Improvement of the Crest Lines of the Dune Regions
E. Identification of the Troughs
4.2.2. Phase II—Dune Identification
A. Calculation of the Crest Line Attributes
B. Matching of the Troughs with Their Related Crest Lines
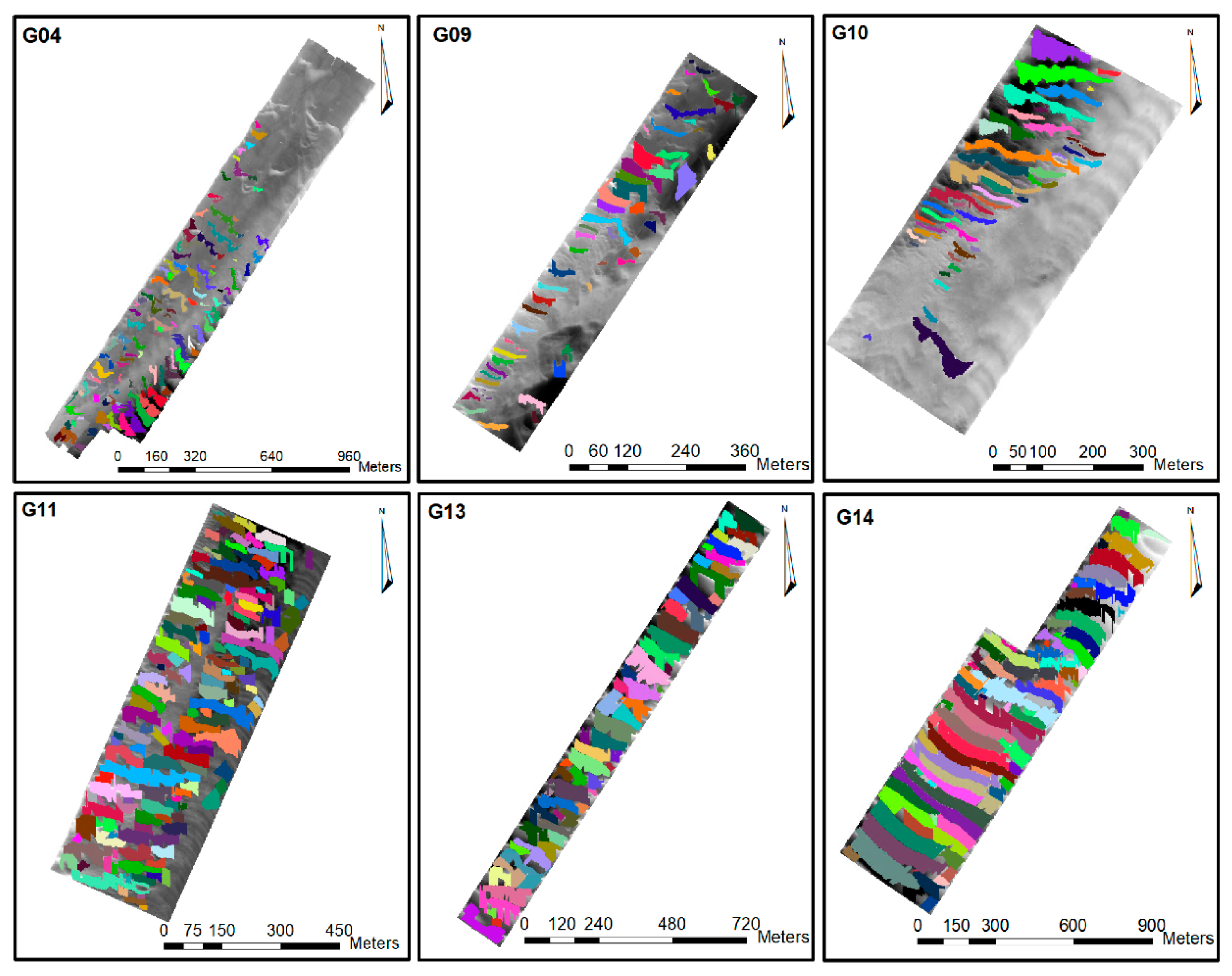
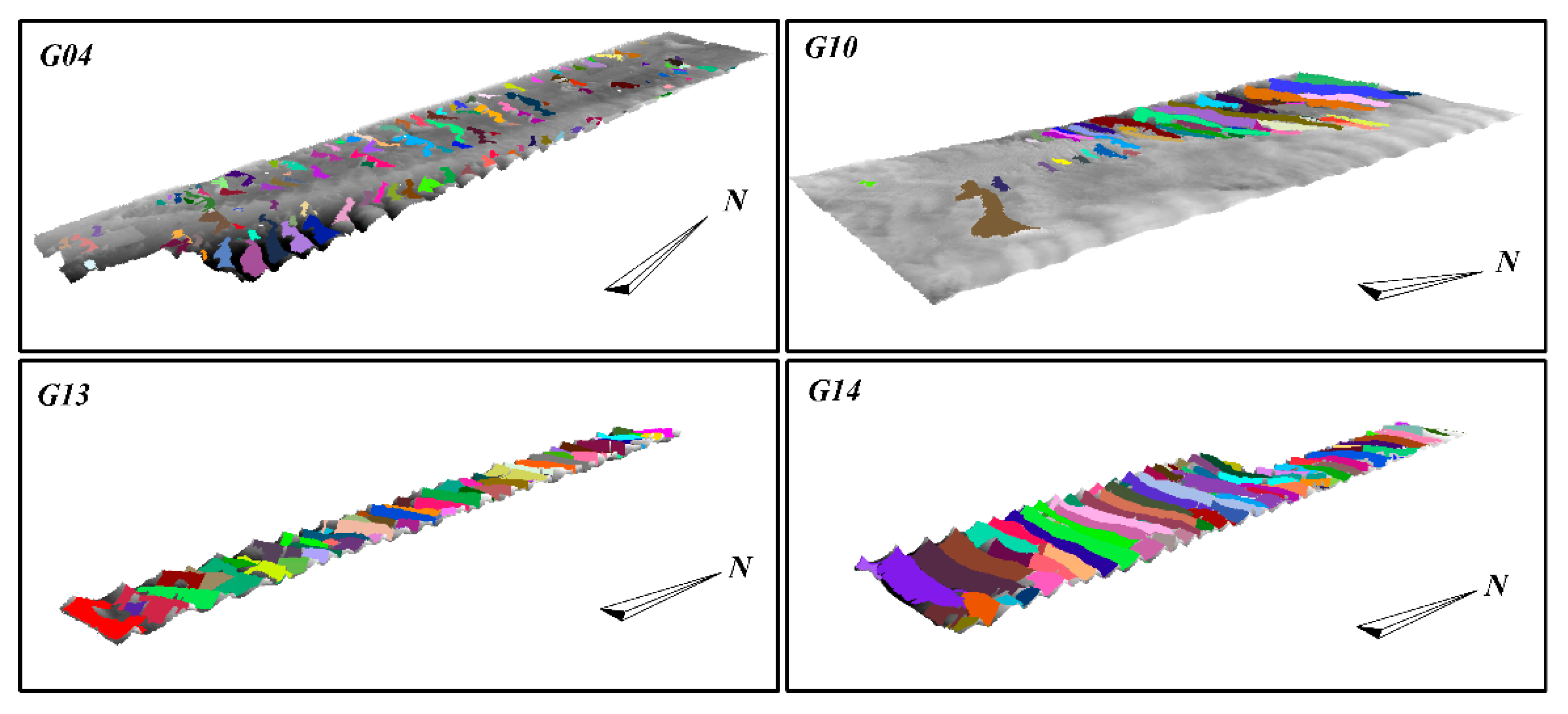
C. Creation of Dune Objects
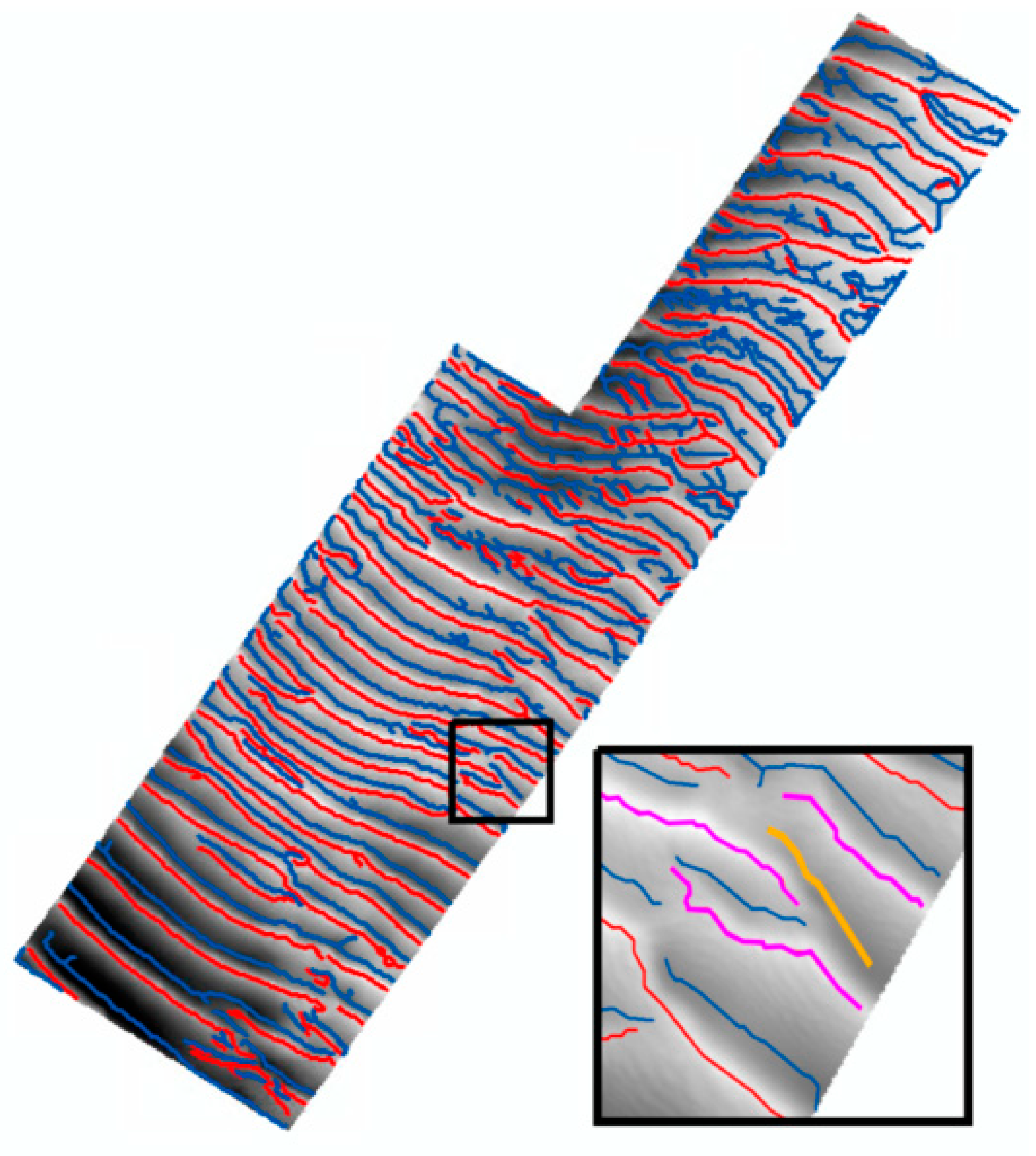
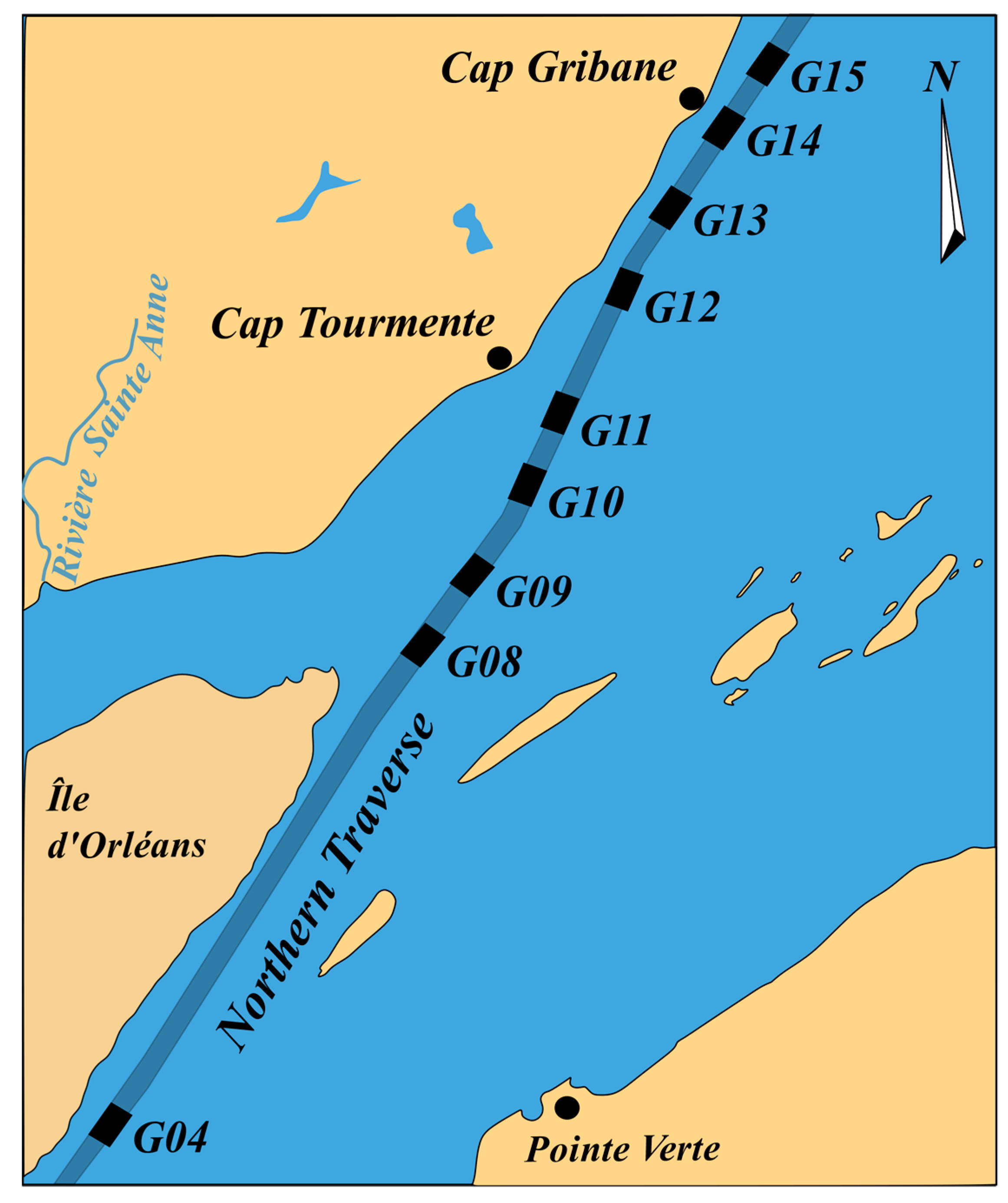
5. Segmentation of the Dunes of the Northern Traverse of the Saint-Lawrence River
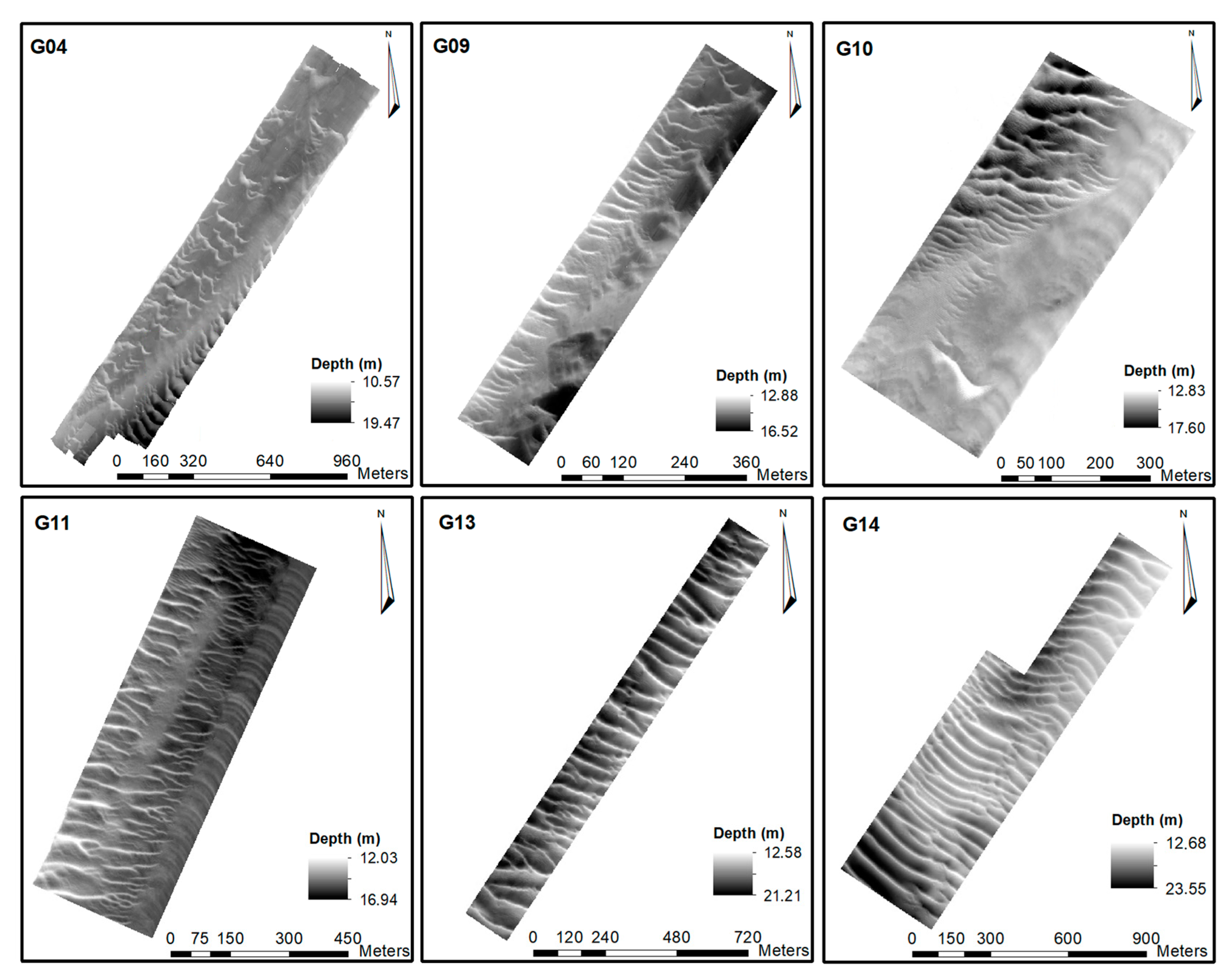
5.1. DBM Description
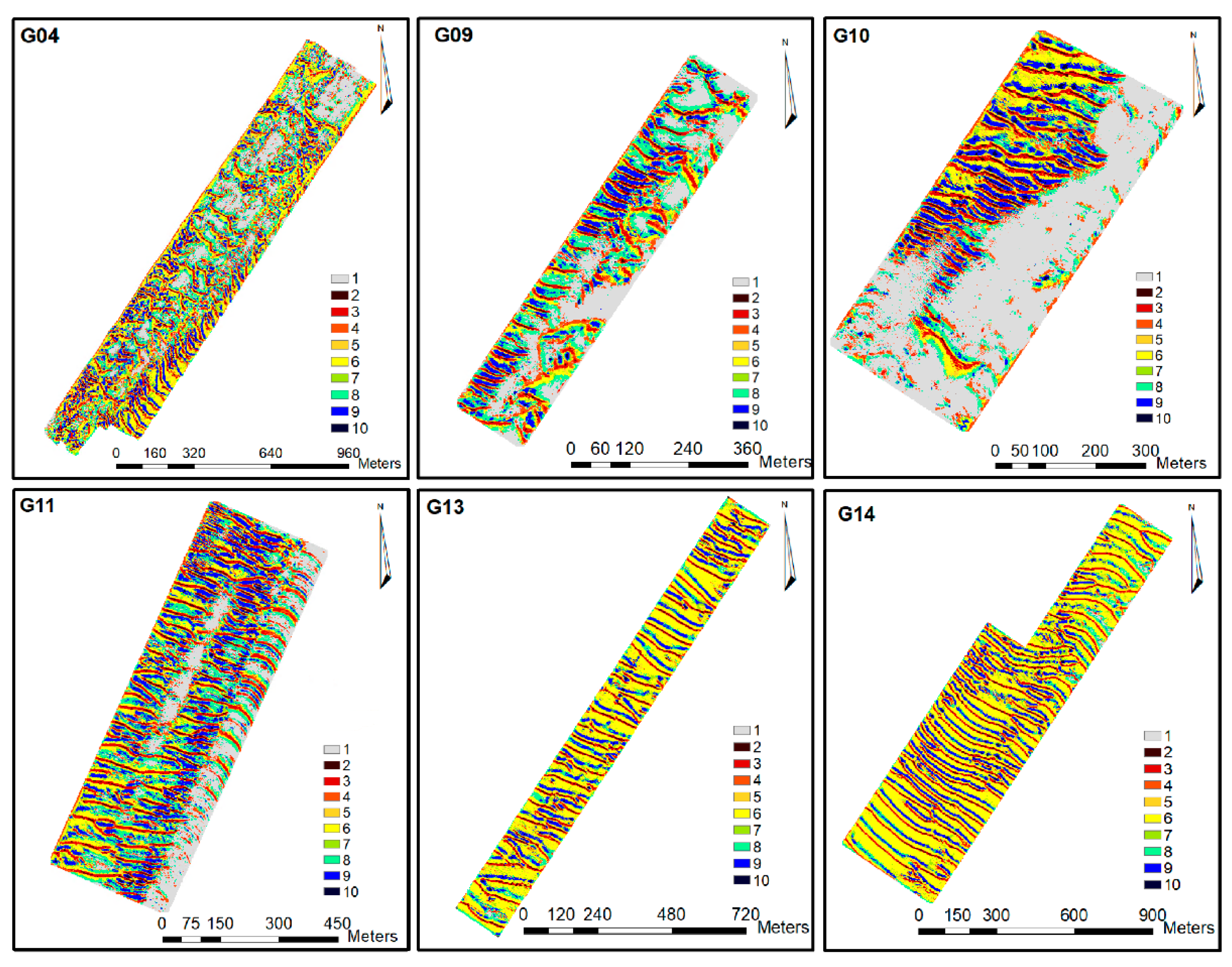
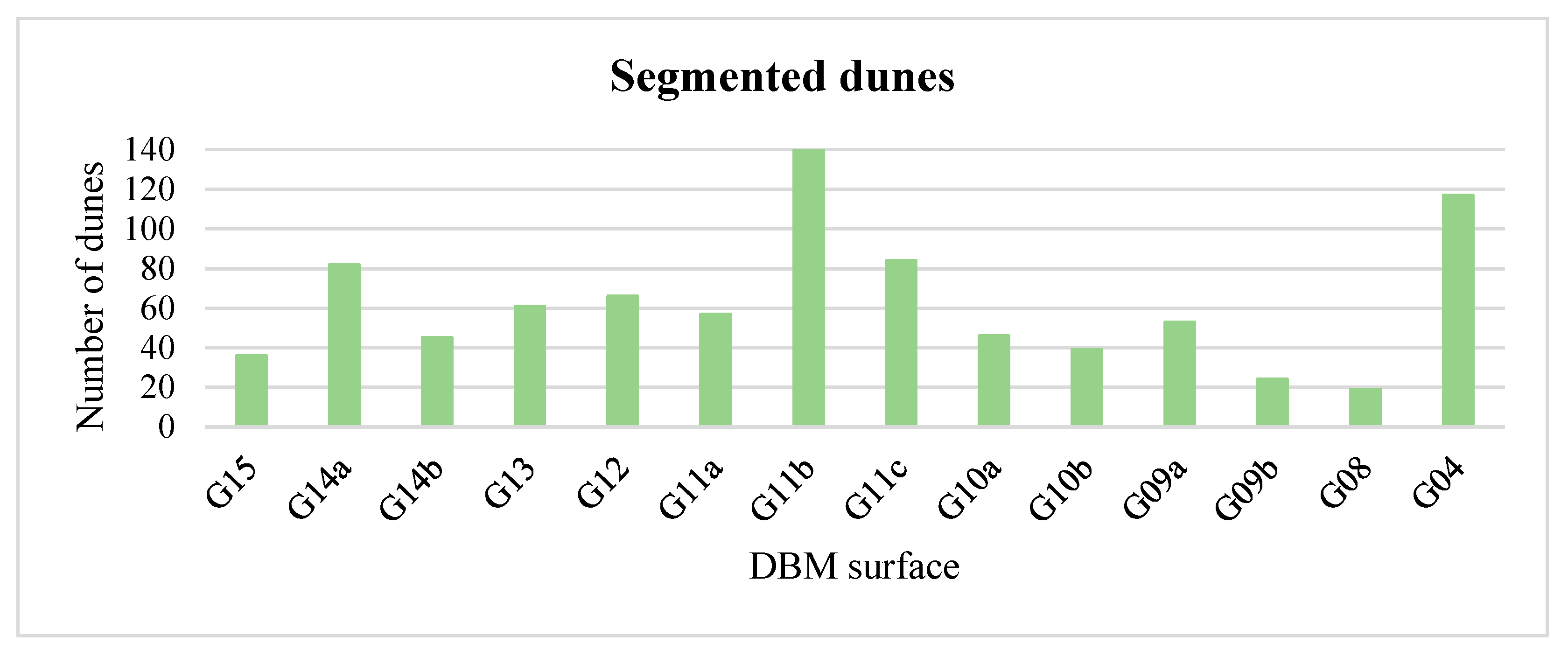
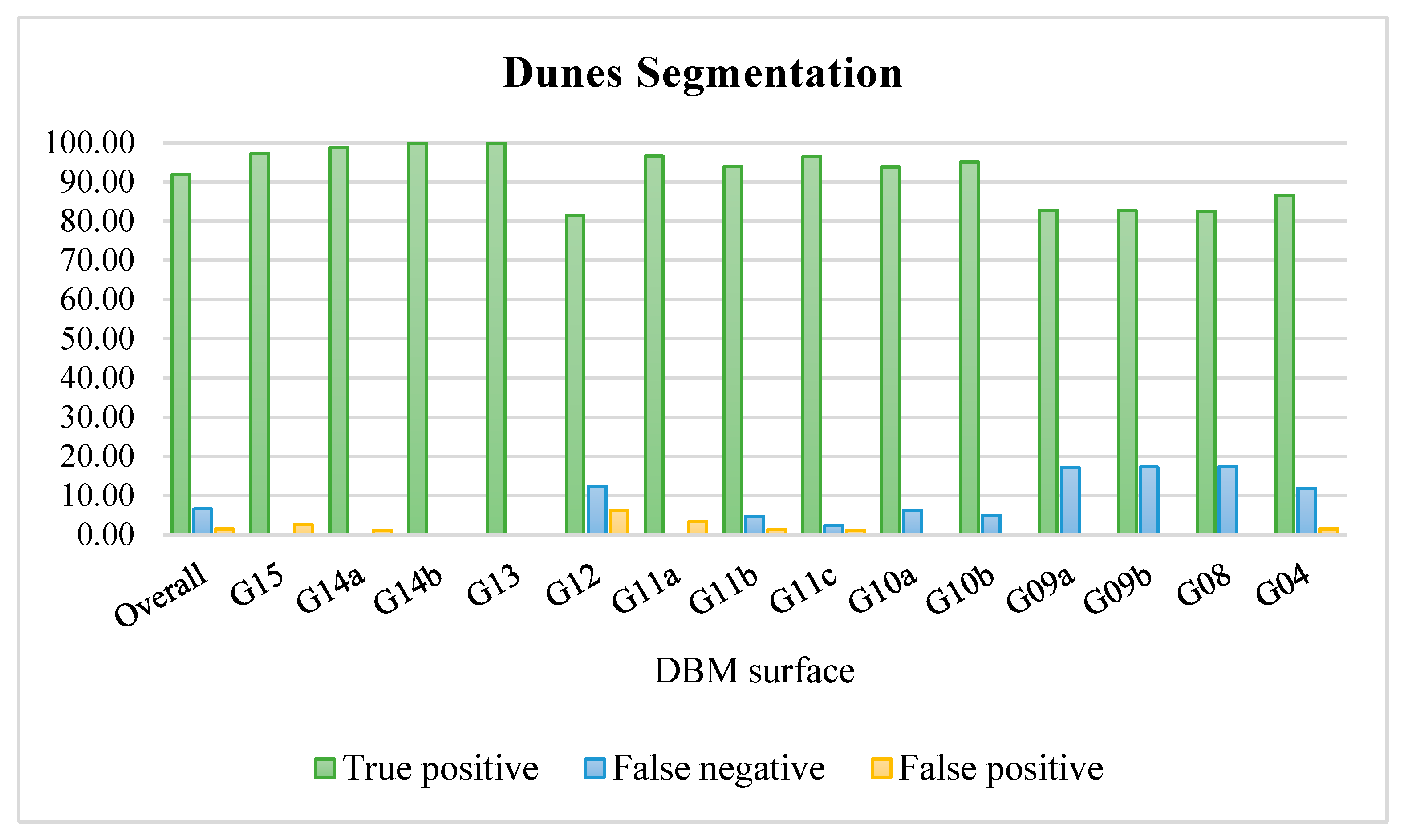
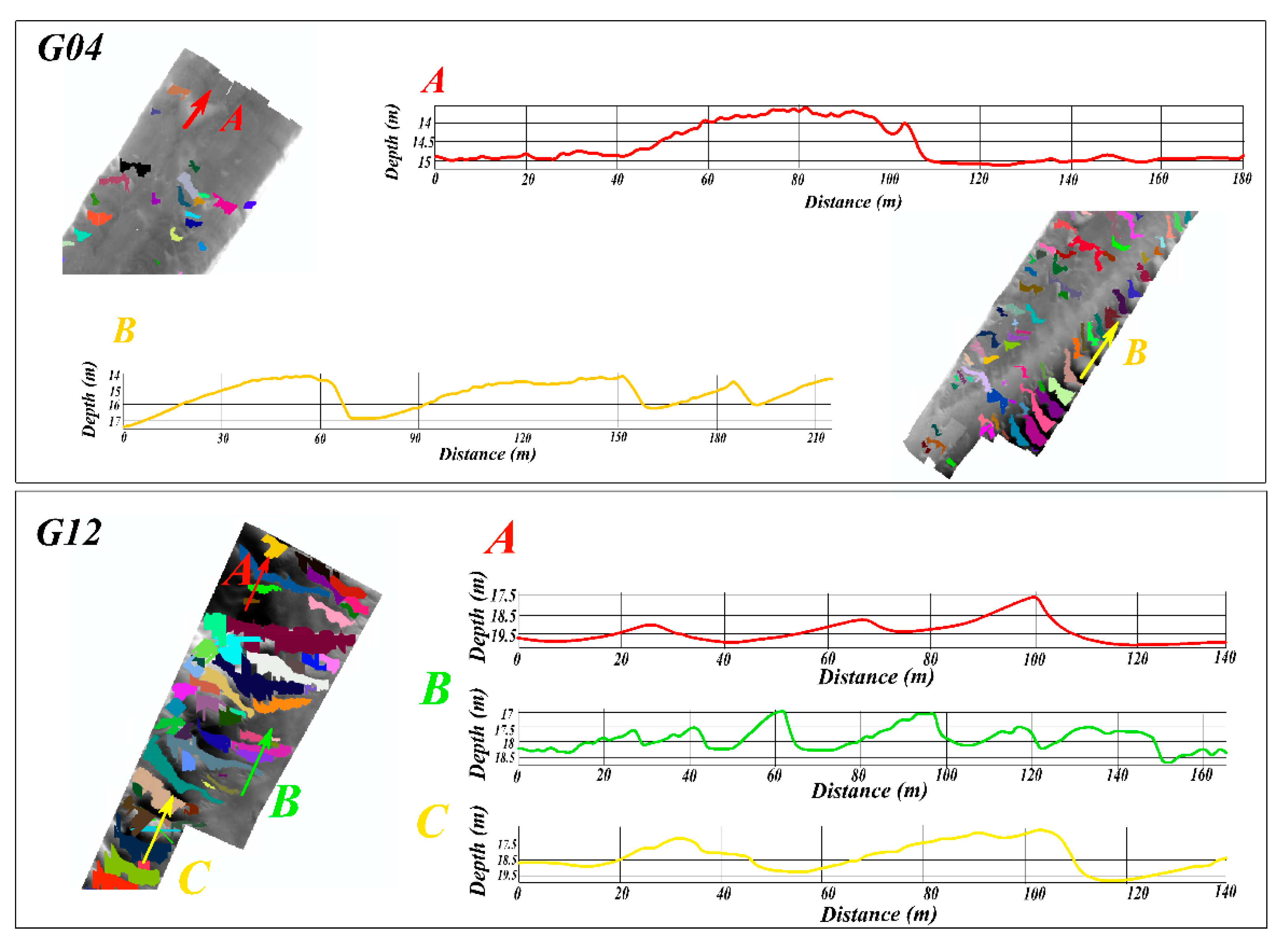
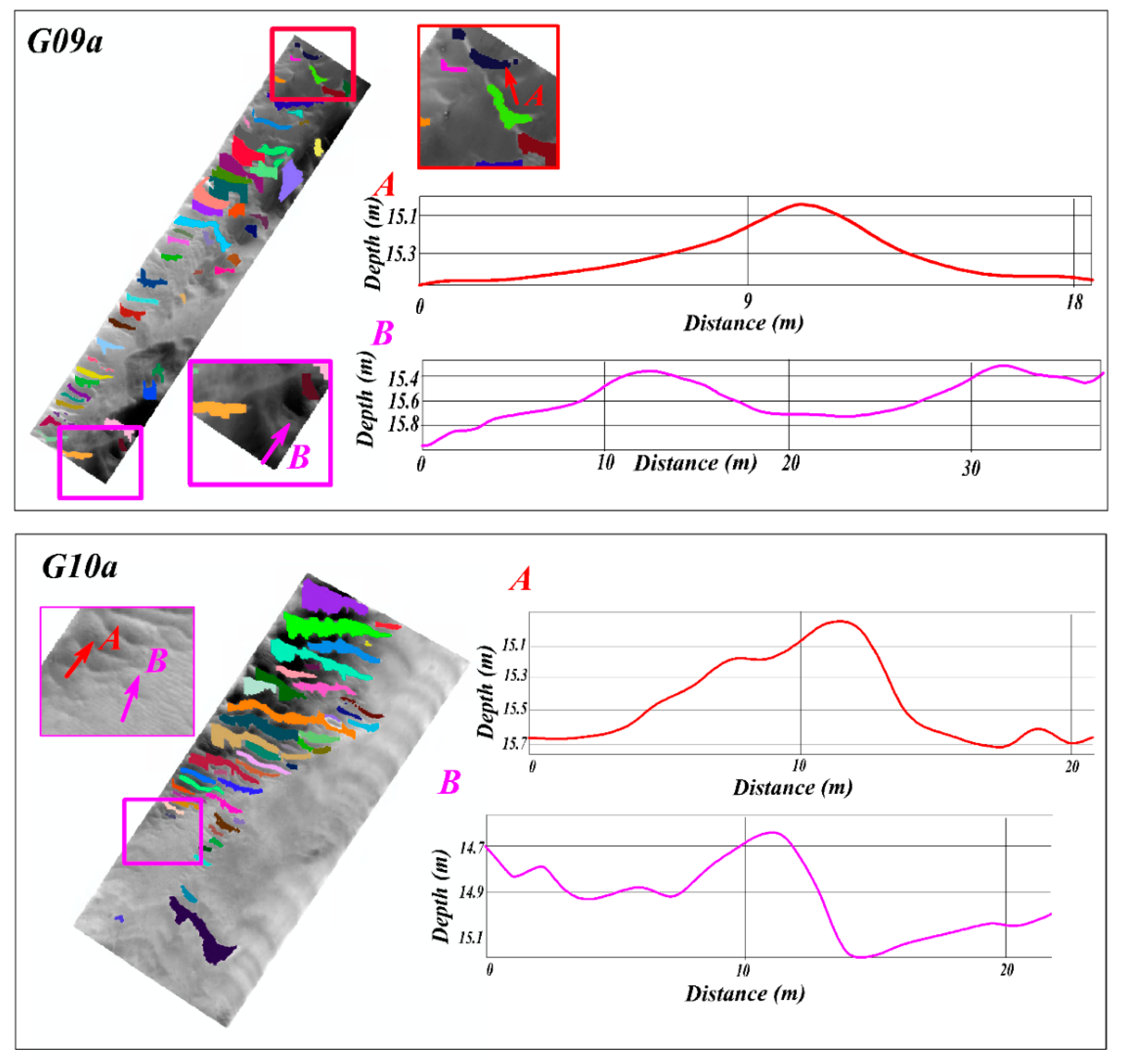
5.2. Segmentation Results
5.3. Segmentation Result Analysis and Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Debese, N.; Jacq, J.J.; Garlan, T. Extraction of sandy bedforms features through geodesic morphometry. Geomorphology 2016, 267, 82–97. [Google Scholar] [CrossRef] [Green Version]
- Ogor, J. Design of Algorithms for the Automatic Characterization of Marine Dune Morphology and Dynamics. Ocean, Atmosphere. Ph.D. Thesis, ENSTA-Bretagne, Brest, France, 2018. [Google Scholar]
- Di Stefano, M.; Mayer, L.A. An automatic procedure for the quantitative characterization of submarine bedforms. Geosciences 2018, 8, 28. [Google Scholar] [CrossRef] [Green Version]
- Jasiewicz, J.; Stepinski, T.F. Geomorphons—a pattern reconigtion approach to classification and mapping of landforms. Geomorphology 2012, 182, 147–156. [Google Scholar] [CrossRef]
- Masetti, G.; Mayer, L.A.; Ward, L.G. A Bathymetry- and Reflectivity-Based Approach for Seafloor Segmentation. Geosciences 2018, 8, 14. [Google Scholar] [CrossRef] [Green Version]
- Lecours, V.; Dolan, M.F.J.; Micallef, A.; Lucieer, V.L. A review of marine geomorphometry, the quantitative study of the seafloor. Hydrol. Earth Syst. Sci. 2016, 20, 3207–3244. [Google Scholar] [CrossRef] [Green Version]
- Lucieer, V.; Lecours, V.; Dolan, M.F.J. Charting the course for future developments in marine geomorphometry: An introduction to the special issue. Geosciences 2018, 8, 477. [Google Scholar] [CrossRef] [Green Version]
- Wood, J. The Geomorphological Characterization of Digital Elevation Models. Ph.D. Thesis, University of Leicester, Leicester, UK, 1996. [Google Scholar]
- Dragut, L.; Blaschke, T. Automated classification of landform elements using object-bases image analysis. Geomorphology 2006, 81, 330–344. [Google Scholar] [CrossRef]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef] [Green Version]
- Benz, U.C.; Hofmann, P.; Willhauck, G.; Lingenfelder, I.; Heynen, M. Multi-resolution, object oriented fuzzy analysis of remote sensing data for GIS-ready information. ISPRS J. Photogramm. Remote Sens. 2004, 58, 239–258. [Google Scholar] [CrossRef]
- Castilla, G.; Hay, G.J. Image objects and geographic objects. In Object-Based Image Analysis, Lecture Notes in Geoinformation and Cartography; Blaschke, T., Lang, S., Hay, G.J., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; Chapter 1.5; 20p. [Google Scholar] [CrossRef]
- Soille, P.; Pesaresi, M. Advances in mathematical morphology applied to geosciences and remote sensing. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2042–2055. [Google Scholar] [CrossRef]
- López-Ornelas, E. High resolution images: Segmenting, extracting information and GIS integration. World Acad. Sci. Eng. Technol. 2009, 54, 172–177. [Google Scholar]
- d’Oleire-Oltmanns, S.; Eisank, C.; Dragut, L.; Blaschke, T. An object-based workflow to extract landforms at multiple scale from two distinct data types. IEEE Geosci. Remote Sens. Lett. 2013, 10, 947–951. [Google Scholar] [CrossRef]
- Ismail, K.; Huvenne, V.A.I.; Masson, D.G. Objective automated classification technique for marine landscape mapping in submarine canyons. Mar. Geol. 2015, 362, 17–32. [Google Scholar] [CrossRef] [Green Version]
- Dragut, L.; Tiede, D.; Levick, S.R. ESP: A tool to estimate scale parameter for multiresolution image segmentation of remotely sensed data. Int. J. Geogr. Inf. Sci. 2010, 24, 859–871. [Google Scholar] [CrossRef]
- Diesing, M.; Thorsnes, T. Mapping of cold-water coral carbonate mounds based on geomorphometric features: An object-based approach. Geosciences 2018, 8, 38. [Google Scholar] [CrossRef] [Green Version]
- Sowers, D.C.; Masetti, G.; Mayer, L.A.; Johnson, P.; Gardner, J.V.; Armstrong, A.A. Standardized Geomorphic Classification of the Seafloor within the United States Atlantic Canyons and Continental Margin. Front. Mar. Sci. 2020, 7, 9. [Google Scholar] [CrossRef] [Green Version]
- Deng, Y. New trends in digital terrain analysis: Landform definition, representation, and classification. Prog. Phys. Geogr. 2007, 31, 405–419. [Google Scholar] [CrossRef]
- Arvor, D.; Belgiu, M.; Falomir, Z.; Mougenot, I.; Durieux, L. Ontologies to interpret remote sensing images: Why do we need them? Giscience Remote Sens. 2019, 56, 911–939. [Google Scholar] [CrossRef] [Green Version]
- Guilbert, E.; Moulin, B.; Cortés Murcia, A. A conceptual model for the representation of landforms using ontology design patterns. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume III-2. In Proceedings of the XXIII ISPRS Congress, Prague, Czech Republic, 12–19 July 2016. 8p. [Google Scholar]
- Guilbert, E.; Moulin, B. Towards a Common Framework for the Identification of Landforms on Terrain Models. ISPRS Int. J. Geo-Inf. 2017, 6, 12. [Google Scholar] [CrossRef]
- Ferret, Y. Morphodynamique de Dunes Sous-Marines en Contexte de Plate-Forme Mégatidale (Manche Orientale). Approche Multi-Échelles Spatio-Temporelles. Interfaces Continentales, Environnement. Ph.D. Thesis, Université de Rouen, Mont-Saint-Aignan, France, 2011. [Google Scholar]
- Nichols, G. Sedimentology and Stratigraphy, 2th ed.; Chapter 4 Processes of Transport and Sedimentary Structures; Wiley-Blackwell, A John Wiley & Sons, Ltd., Publication: West Sussex, UK, 2009; pp. 44–68. [Google Scholar]
- Garlan, T. Study on Marine Sandwave Dynamics. Int. Hydrogr. Rev. 2007, 8, 26–37. [Google Scholar]
- Thibaud, R.; Del Mondo, G.; Garlan, T.; Mascret, A.; Carpentier, C. A Spatio-Temporal Graph Model for Marine Dune Dynamics Analysis and Representation. Trans. GIS 2013, 17, 742–762. [Google Scholar] [CrossRef]
- Boggs, S. Principles of Sedimentology and Stratigraphy, 4th ed.; Chapter 4 Sedimentary structures; Chapter 9 Marginal Marine Environments; Pearson Prentice Hall: Upper Saddle River, NJ, USA, 2006; pp. 74–116, 289–333. ISBN 0-13-154728-3. [Google Scholar]
- Ashley, G.M. Classification of large-scale subaqueous bedforms: A new look to an old problem. J. Sediment. Petrol. 1990, 60, 160–172. [Google Scholar]
- Gutierrez, R.R.; Abad, J.D.; Parsons, D.R.; Best, J.L. Discrimination of bed form scales using robust spline filters and wavelet transforms: Methods and application to synthetic signals and bed forms of the Rio Paraná, Argentina. J. Geophys. Res. Earth Surf. 2013, 118, 1400–1419. [Google Scholar] [CrossRef]
- van der Mark, C.F.; Blom, A. A New & Widely Applicable Bedform Tracking Tool; University of Twente: Enschede, The Netherlands, 2007; 44p. [Google Scholar]
- Garlan, T. GIS and Mapping of Moving Marine Sand Dunes. Presented at the 24th International Cartography Conference, (ICC 2009), Santiago, Chile, 15–21 November 2009. [Google Scholar]
- Comité de Concertation Navigation de Saint Laurent Vision 2000. Stratégie de Navigation Durable Pour le Saint-Laurent; Ministère des Transports du Québec et Pêches et Océans Canada: Québec, QC, Cananda, 2004; 114p. [Google Scholar]
- Dupont, V. Élaboration D’une Méthode D’extraction de Plans par Croissance de Régions Dans un Nuage de Points Bathymétriques Servant à Alimenter des Estimateurs D’erreur Hydrographique. Master’s Thesis, Université Laval, Québec, QC, Cananda, 2020; 120p. [Google Scholar]
- Nguyen, T.H.; Daniel, S.; Guériot, D.; Sintès, C.; Le Caillec, J.M. Super-resolution-based snake model—an unsupervised method for large-scale building extraction using airborne LiDAR data and optical image. Remote Sens. 2020, 12, 1702. [Google Scholar] [CrossRef]
- Canadian Hydrographic Service (CHS). Traitement et Analyse de Données Bathymétriques de CUBE; Pêches et Océans Canada: Agassiz, BC, Canada, 2012; 7p. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Small | Medium | Large | Very Large |
|---|---|---|---|---|
| Wavelength (m) | 0.6 to 5 | 5 to 10 | 10 to 100 | More than 100 |
| Height (m) | 0.075 to 0.4 | 0.4 to 0.75 | 0.75 to 5 | More than 5 |
| Parameter | Values |
|---|---|
| Outer search radius | [5, 10, 15, 20, 25, 30] |
| Inner search radius | [1, 2, 3, 4, 5] |
| Flatness threshold | [0.5, 1, 1.5, 2, 2.5, 3] |
| Flatness distance | [0, 0.5, 1, 2, 3, 4, 5] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cassol, W.N.; Daniel, S.; Guilbert, É. A Segmentation Approach to Identify Underwater Dunes from Digital Bathymetric Models. Geosciences 2021, 11, 361. https://doi.org/10.3390/geosciences11090361
Cassol WN, Daniel S, Guilbert É. A Segmentation Approach to Identify Underwater Dunes from Digital Bathymetric Models. Geosciences. 2021; 11(9):361. https://doi.org/10.3390/geosciences11090361
Chicago/Turabian StyleCassol, Willian Ney, Sylvie Daniel, and Éric Guilbert. 2021. "A Segmentation Approach to Identify Underwater Dunes from Digital Bathymetric Models" Geosciences 11, no. 9: 361. https://doi.org/10.3390/geosciences11090361
APA StyleCassol, W. N., Daniel, S., & Guilbert, É. (2021). A Segmentation Approach to Identify Underwater Dunes from Digital Bathymetric Models. Geosciences, 11(9), 361. https://doi.org/10.3390/geosciences11090361