
Deep Learning Methods for Tracking the Locomotion of Individual Chickens





Abstract
Simple Summary
Abstract
1. Introduction
2. Materials and Methods
2.1. Data Acquisition
2.2. Marking Approach
2.3. Model Innovation for Tracking Chickens
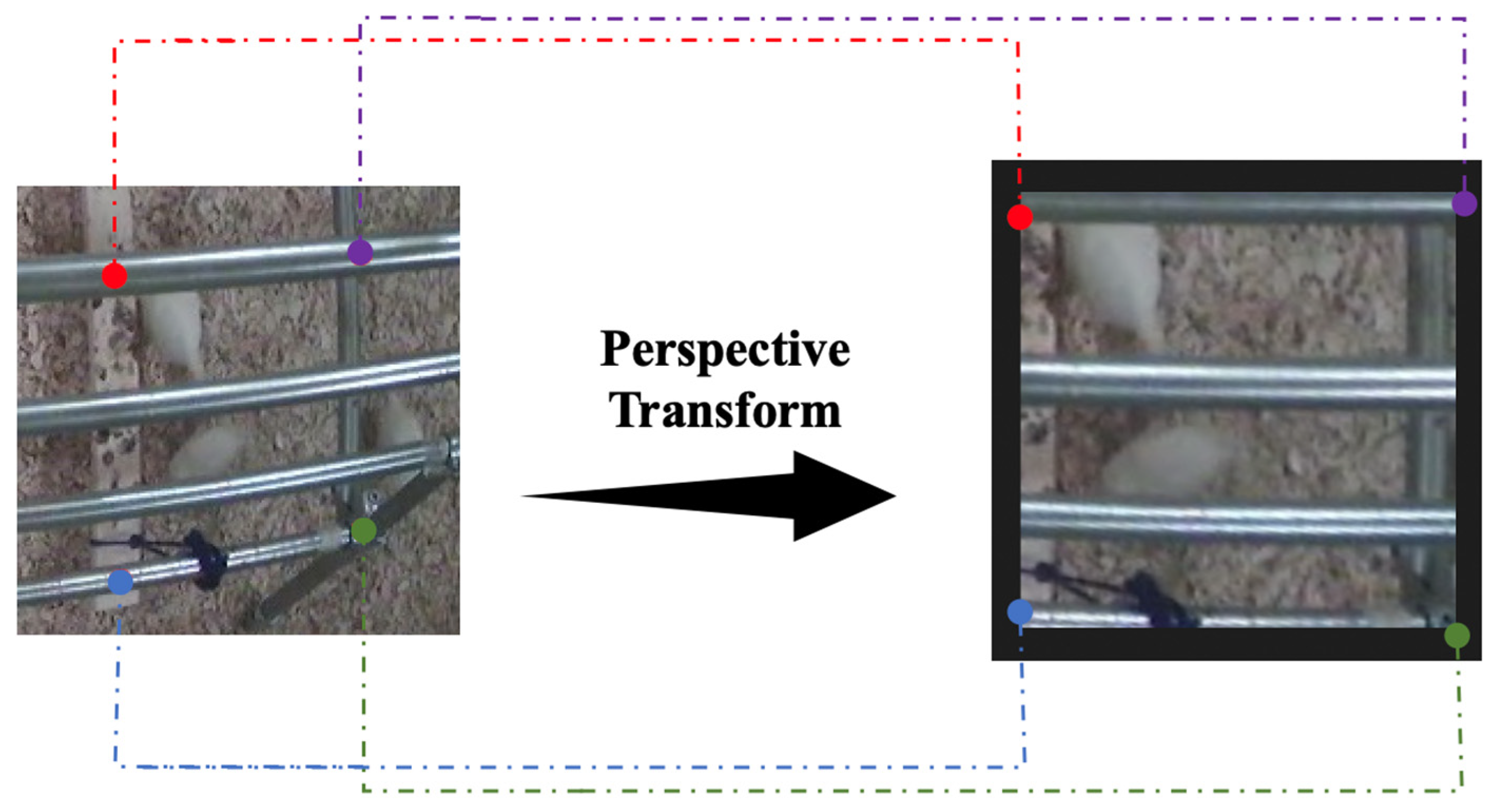
2.4. Methods of Speed Calculation in Chicken Tracking
- ΔY is the vertical pixel displacement of the chicken in the top-down view.
- W is the actual physical distance represented by one pixel in the top-down view.
- M and N are the frame numbers where the chicken’s position was recorded.
2.5. Model Evaluation Metrics
3. Results
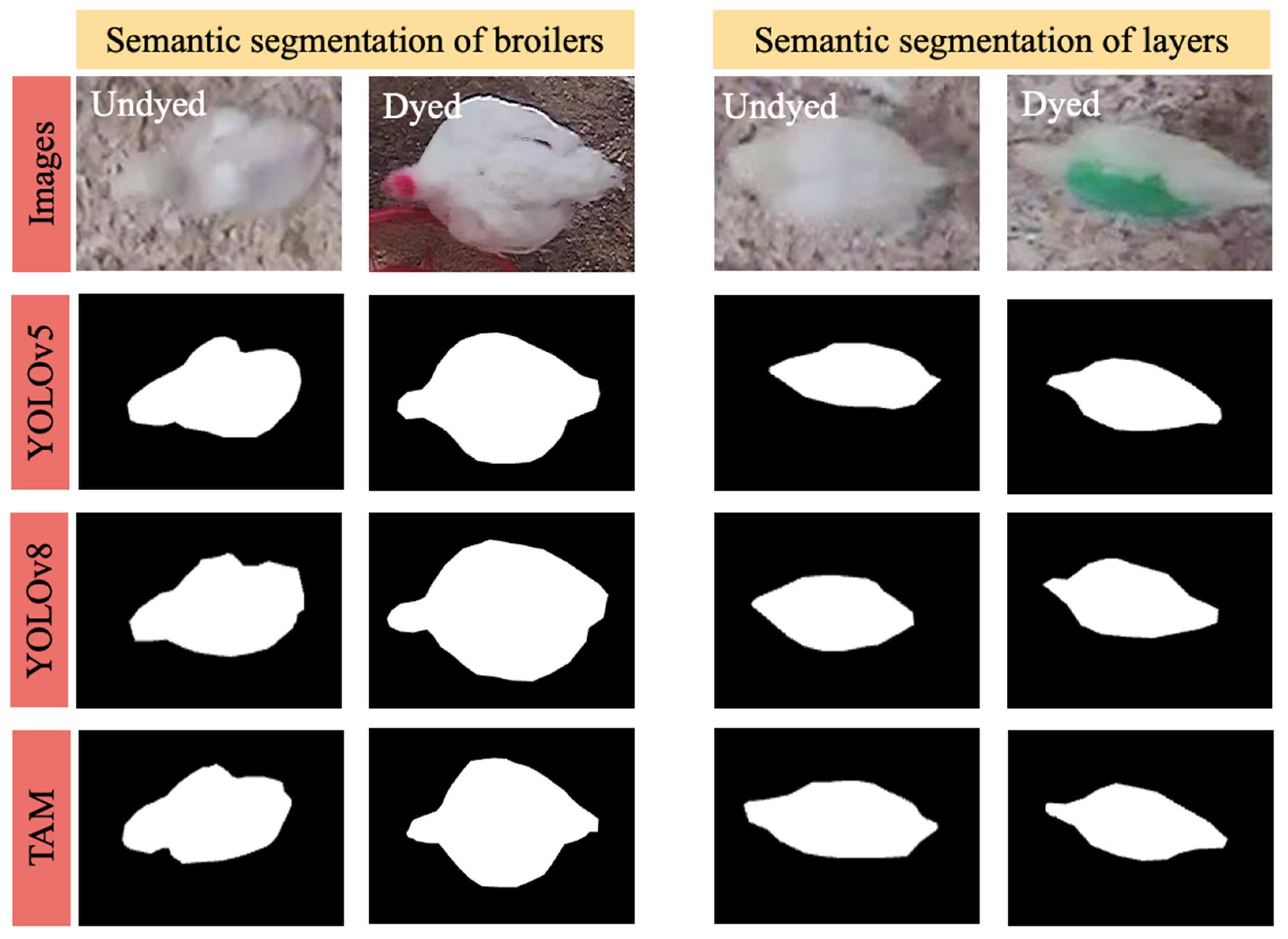
3.1. Comparison of Segmentation Approaches
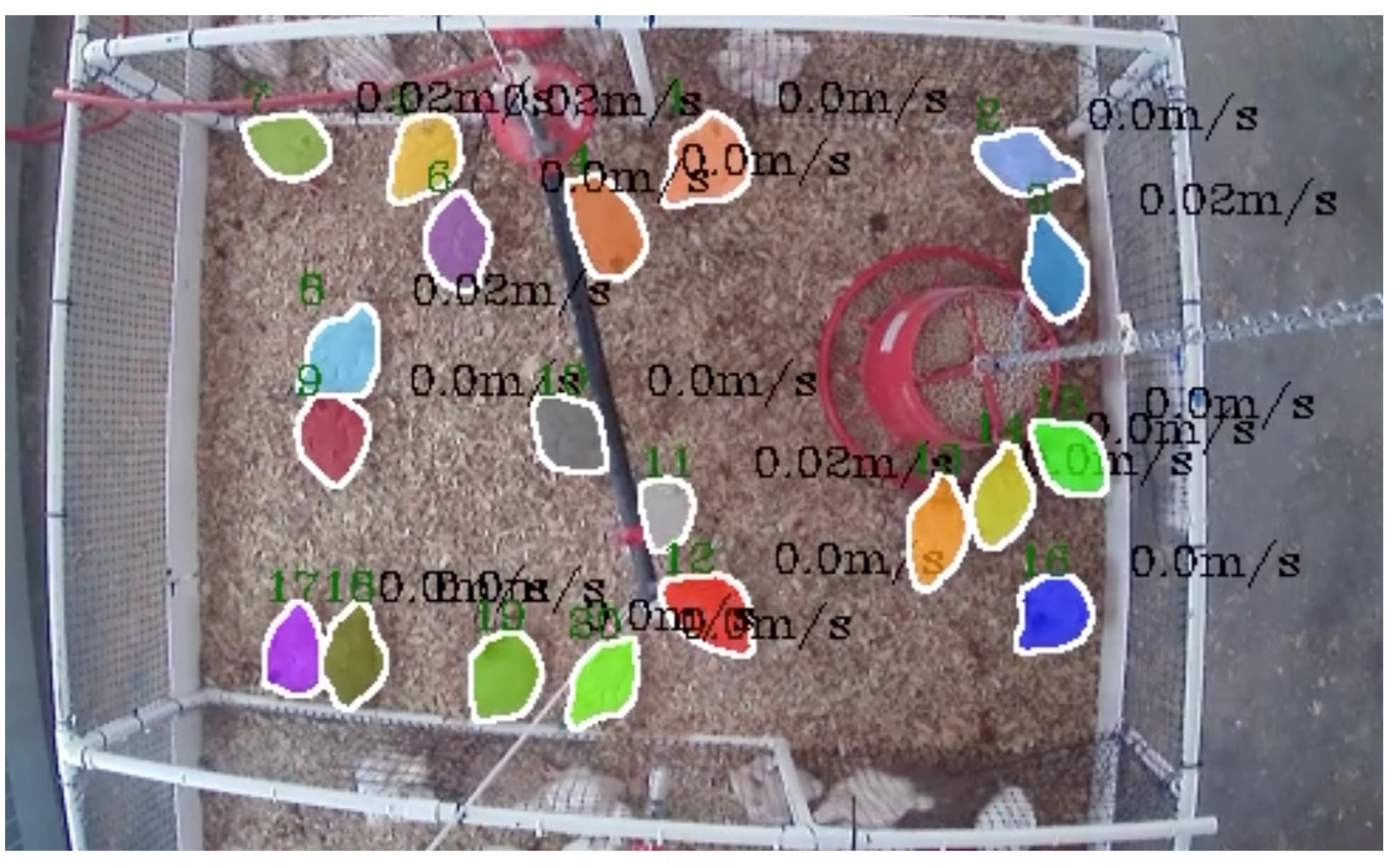
3.2. Assessing the Performance of Chicken Tracking
3.3. Evaluating Velocity Measurement
4. Discussion
4.1. Chicken Segmentation Approaches
4.2. The Precision of Velocity Measurement in Poultry Tracking
4.3. Limitations and Future Works
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Morrone, S.; Dimauro, C.; Gambella, F.; Cappai, M.G. Industry 4.0 and Precision Livestock Farming (PLF): An up to Date Overview across Animal Productions. Sensors 2022, 22, 4319. [Google Scholar] [CrossRef]
- Li, W.; Xiao, Y.; Song, X.; Lv, N.; Jiang, X.; Huang, Y.; Peng, J. Chicken Image Segmentation via Multi-Scale Attention-Based Deep Convolutional Neural Network. IEEE Access 2021, 9, 61398–61407. [Google Scholar] [CrossRef]
- Yang, X.; Chai, L.; Bist, R.B.; Subedi, S.; Wu, Z. A Deep Learning Model for Detecting Cage-Free Hens on the Litter Floor. Animals 2022, 12, 1983. [Google Scholar] [CrossRef]
- Siriani, A.L.R.; Kodaira, V.; Mehdizadeh, S.A.; de Alencar Nääs, I.; de Moura, D.J.; Pereira, D.F. Detection and Tracking of Chickens in Low-Light Images Using YOLO Network and Kalman Filter. Neural Comput. Appl. 2022, 34, 21987–21997. [Google Scholar] [CrossRef]
- Liu, H.-W.; Chen, C.-H.; Tsai, Y.-C.; Hsieh, K.-W.; Lin, H.-T. Identifying Images of Dead Chickens with a Chicken Removal System Integrated with a Deep Learning Algorithm. Sensors 2021, 21, 3579. [Google Scholar] [CrossRef]
- Gorji, H.T.; Shahabi, S.M.; Sharma, A.; Tande, L.Q.; Husarik, K.; Qin, J.; Chan, D.E.; Baek, I.; Kim, M.S.; MacKinnon, N.; et al. Combining Deep Learning and Fluorescence Imaging to Automatically Identify Fecal Contamination on Meat Carcasses. Sci. Rep. 2022, 12, 2392. [Google Scholar] [CrossRef] [PubMed]
- Bist, R.B.; Yang, X.; Subedi, S.; Chai, L. Mislaying Behavior Detection in Cage-Free Hens with Deep Learning Technologies. Poult. Sci. 2023, 102, 102729. [Google Scholar] [CrossRef] [PubMed]
- Ben Sassi, N.; Averós, X.; Estevez, I. Technology and Poultry Welfare. Animals 2016, 6, 62. [Google Scholar] [CrossRef] [PubMed]
- Tong, Q.; Zhang, E.; Wu, S.; Xu, K.; Sun, C. A Real-Time Detector of Chicken Healthy Status Based on Modified YOLO. SIViP 2023, 17, 4199–4207. [Google Scholar] [CrossRef]
- Neethirajan, S. ChickTrack–A Quantitative Tracking Tool for Measuring Chicken Activity. Measurement 2022, 191, 110819. [Google Scholar] [CrossRef]
- Elmessery, W.M.; Gutiérrez, J.; Abd El-Wahhab, G.G.; Elkhaiat, I.A.; El-Soaly, I.S.; Alhag, S.K.; Al-Shuraym, L.A.; Akela, M.A.; Moghanm, F.S.; Abdelshafie, M.F. YOLO-Based Model for Automatic Detection of Broiler Pathological Phenomena through Visual and Thermal Images in Intensive Poultry Houses. Agriculture 2023, 13, 1527. [Google Scholar] [CrossRef]
- Lu, G.; Li, S.; Mai, G.; Sun, J.; Zhu, D.; Chai, L.; Sun, H.; Wang, X.; Dai, H.; Liu, N.; et al. AGI for Agriculture. arXiv 2023, arXiv:2304.06136. [Google Scholar]
- Yang, X.; Dai, H.; Wu, Z.; Bist, R.; Subedi, S.; Sun, J.; Lu, G.; Li, C.; Liu, T.; Chai, L. SAM for Poultry Science. arXiv 2023, arXiv:2305.10254. [Google Scholar]
- Ahmadi, M.; Lonbar, A.G.; Sharifi, A.; Beris, A.T.; Nouri, M.; Javidi, A.S. Application of Segment Anything Model for Civil Infrastructure Defect Assessment. arXiv 2023, arXiv:2304.12600. [Google Scholar]
- Subedi, S.; Bist, R.; Yang, X.; Chai, L. Tracking Pecking Behaviors and Damages of Cage-Free Laying Hens with Machine Vision Technologies. Comput. Electron. Agric. 2023, 204, 107545. [Google Scholar] [CrossRef]
- Shi, H.; Li, B.; Tong, Q.; Zheng, W.; Zeng, D.; Feng, G. Effects of LED Light Color and Intensity on Feather Pecking and Fear Responses of Layer Breeders in Natural Mating Colony Cages. Animals 2019, 9, 814. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.; Gao, M.; Li, Z.; Gao, S.; Wang, F.; Zheng, F. Track Anything: Segment Anything Meets Videos. arXiv 2023, arXiv:2304.11968. [Google Scholar]
- Cheng, H.K.; Schwing, A.G. XMem: Long-Term Video Object Segmentation with an Atkinson-Shiffrin Memory Model. In Computer Vision–ECCV 2022; Springer: Cham, Switzerland, 2022. [Google Scholar]
- Sun, Z.; Bebis, G.; Miller, R. On-Road Vehicle Detection: A Review. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 694–711. [Google Scholar] [CrossRef]
- Cao, J.; Pang, J.; Weng, X.; Khirodkar, R.; Kitani, K. Observation-Centric SORT: Rethinking SORT for Robust Multi-Object Tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 17–24 June 2023; pp. 9686–9696. [Google Scholar]
- Wojke, N.; Bewley, A.; Paulus, D. Simple Online and Realtime Tracking with a Deep Association Metric. In Proceedings of the 2017 IEEE International Conference on Image Processing (ICIP), Beijing, China, 17–20 September 2017. [Google Scholar]
- Zhang, Y.; Sun, P.; Jiang, Y.; Yu, D.; Weng, F.; Yuan, Z.; Luo, P.; Liu, W.; Wang, X. ByteTrack: Multi-Object Tracking by Associating Every Detection Box. In Proceedings of the Computer Vision–ECCV 2022: 17th European Conference, Tel Aviv, Israel, 23–27 October 2022, Proceedings, Part XXII; Springer: Berlin/Heidelberg, Germany, 2022; pp. 1–21. [Google Scholar]
- Du, Y.; Zhao, Z.; Song, Y.; Zhao, Y.; Su, F.; Gong, T.; Meng, H. StrongSORT: Make DeepSORT Great Again. IEEE Trans. Multimed. 2023, 25, 8725–8737. [Google Scholar] [CrossRef]
- Wei, Y.; Zhang, D.; Gao, M.; Tian, Y.; He, Y.; Huang, B.; Zheng, C. Breast Cancer Prediction Based on Machine Learning. J. Softw. Eng. Appl. 2023, 16, 348–360. [Google Scholar] [CrossRef]
- Culjak, I.; Abram, D.; Pribanic, T.; Dzapo, H.; Cifrek, M. A Brief Introduction to OpenCV. In Proceedings of the 2012 Proceedings of the 35th International Convention MIPRO, Opatija, Croatia, 21–25 May 2012; pp. 1725–1730. [Google Scholar]
- Zhang, D.; Zhou, F.; Yang, X.; Gu, Y. Unleashing the Power of Self-Supervised Image Denoising: A Comprehensive Review. arXiv 2023, arXiv:2308.00247. [Google Scholar]
- Li, C.; Peng, Q.; Wan, X.; Sun, H.; Tang, J. C-Terminal Motifs in Promyelocytic Leukemia Protein Isoforms Critically Regulate PML Nuclear Body Formation. J. Cell Sci. 2017, 130, 3496–3506. [Google Scholar] [CrossRef] [PubMed]
- Bidese Puhl, R. Precision Agriculture Systems for the Southeast US Using Computer Vision and Deep Learning; Auburn University: Auburn, AL, USA, 2023. [Google Scholar]
- Early Warning System for Open-Beaked Ratio, Spatial Dispersion, and Movement of Chicken Using CNNs. Available online: https://elibrary.asabe.org/abstract.asp?JID=5&AID=54230&CID=oma2023&T=1 (accessed on 15 October 2023).
- Okinda, C.; Nyalala, I.; Korohou, T.; Okinda, C.; Wang, J.; Achieng, T.; Wamalwa, P.; Mang, T.; Shen, M. A Review on Computer Vision Systems in Monitoring of Poultry: A Welfare Perspective. Artif. Intell. Agric. 2020, 4, 184–208. [Google Scholar] [CrossRef]
- Fang, C.; Huang, J.; Cuan, K.; Zhuang, X.; Zhang, T. Comparative Study on Poultry Target Tracking Algorithms Based on a Deep Regression Network. Biosyst. Eng. 2020, 190, 176–183. [Google Scholar] [CrossRef]
- Wang, J.; Liu, Z.; Zhao, L.; Wu, Z.; Ma, C.; Yu, S.; Dai, H.; Yang, Q.; Liu, Y.; Zhang, S.; et al. Review of Large Vision Models and Visual Prompt Engineering. Meta-Radiol. 2023, 1, 100047. [Google Scholar] [CrossRef]
- Li, G.; Hui, X.; Lin, F.; Zhao, Y. Developing and Evaluating Poultry Preening Behavior Detectors via Mask Region-Based Convolutional Neural Network. Animals 2020, 10, 1762. [Google Scholar] [CrossRef]
- Wu, L.; Wang, Y.; Liu, J.; Shan, D. Developing a Time-Series Speed Prediction Model Using Transformer Networks for Freeway Interchange Areas. Comput. Electr. Eng. 2023, 110, 108860. [Google Scholar] [CrossRef]
- Fujinami, K.; Takuno, R.; Sato, I.; Shimmura, T. Evaluating Behavior Recognition Pipeline of Laying Hens Using Wearable Inertial Sensors. Sensors 2023, 23, 5077. [Google Scholar] [CrossRef]
- Siegford, J.M.; Berezowski, J.; Biswas, S.K.; Daigle, C.L.; Gebhardt-Henrich, S.G.; Hernandez, C.E.; Thurner, S.; Toscano, M.J. Assessing Activity and Location of Individual Laying Hens in Large Groups Using Modern Technology. Animals 2016, 6, 10. [Google Scholar] [CrossRef]
- Chien, Y.-R.; Chen, Y.-X. An RFID-Based Smart Nest Box: An Experimental Study of Laying Performance and Behavior of Individual Hens. Sensors 2018, 18, 859. [Google Scholar] [CrossRef]
- Feiyang, Z.; Yueming, H.; Liancheng, C.; Lihong, G.; Wenjie, D.; Lu, W. Monitoring Behavior of Poultry Based on RFID Radio Frequency Network. Int. J. Agric. Biol. Eng. 2016, 9, 139–147. [Google Scholar] [CrossRef]
- Doornweerd, J.E.; Kootstra, G.; Veerkamp, R.F.; de Klerk, B.; Fodor, I.; van der Sluis, M.; Bouwman, A.C.; Ellen, E.D. Passive Radio Frequency Identification and Video Tracking for the Determination of Location and Movement of Broilers. Poult. Sci. 2023, 102, 102412. [Google Scholar] [CrossRef] [PubMed]
- Xie, L.; Wei, L.; Zhang, X.; Bi, K.; Gu, X.; Chang, J.; Tian, Q. Towards AGI in Computer Vision: Lessons Learned from GPT and Large Language Models. arXiv 2023, arXiv:2306.08641. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Semantic Segmentation of Broilers | Semantic Segmentation of Layers | ||
|---|---|---|---|---|
| Undyed | Dyed | Undyed | Dyed | |
| YOLOv5 | 81.26 | 85.63 | 80.79 | 85.51 |
| YOLOv8 | 83.44 | 86.91 | 82.59 | 87.72 |
| TAM | 93.15 | 95.13 | 92.17 | 94.82 |
| Algorithm | Condition | MOTA (%) | IDF1 (%) | IDS | FPS |
|---|---|---|---|---|---|
| YOLOv5+DeepSORT | Dyed | 92.13 | 90.25 | 15 | 18 |
| YOLOv5+DeepSORT | Undyed | 88.47 | 86.32 | 25 | 18 |
| YOLOv5+ByteTrack | Dyed | 93.21 | 91.47 | 14 | 15 |
| YOLOv5+ByteTrack | Undyed | 89.36 | 87.14 | 22 | 15 |
| YOLOv8+OC-SORT | Dyed | 95.67 | 93.12 | 12 | 17 |
| YOLOv8+OC-SORT | Undyed | 91.78 | 89.12 | 20 | 17 |
| YOLOv8+StrongSORT | Dyed | 94.56 | 92.34 | 13 | 18 |
| YOLOv8+StrongSORT | Undyed | 90.12 | 88.45 | 23 | 18 |
| TAM-speed | Dyed | 97.45 | 95.67 | 10 | 16 |
| TAM-speed | Undyed | 94.78 | 92.34 | 18 | 16 |
| Algorithm | Condition | RMSE (m/s) | Velocity Range (m/s) |
|---|---|---|---|
| TAM-speed | Dyed | 0.02 | 0.00–0.21 |
| TAM-speed | Undyed | 0.025 | 0.00–0.21 |
| Methods | Dataset (Constructed by Authors) | mIoU (%) | |
|---|---|---|---|
| Number | Type | ||
| EfficientNet-B0 | 108,296 | meat carcasses | 89.34 |
| MSAnet | 300 | caged chickens | 87.7 |
| mask R-CNN | 1700 | hens | 83.6–88.7 |
| TAM (this study) | / | / | 93.12 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Bist, R.B.; Paneru, B.; Chai, L. Deep Learning Methods for Tracking the Locomotion of Individual Chickens. Animals 2024, 14, 911. https://doi.org/10.3390/ani14060911
Yang X, Bist RB, Paneru B, Chai L. Deep Learning Methods for Tracking the Locomotion of Individual Chickens. Animals. 2024; 14(6):911. https://doi.org/10.3390/ani14060911
Chicago/Turabian StyleYang, Xiao, Ramesh Bahadur Bist, Bidur Paneru, and Lilong Chai. 2024. "Deep Learning Methods for Tracking the Locomotion of Individual Chickens" Animals 14, no. 6: 911. https://doi.org/10.3390/ani14060911
APA StyleYang, X., Bist, R. B., Paneru, B., & Chai, L. (2024). Deep Learning Methods for Tracking the Locomotion of Individual Chickens. Animals, 14(6), 911. https://doi.org/10.3390/ani14060911