
Regulation of Meat Duck Activeness through Photoperiod Based on Deep Learning

Abstract
:Simple Summary
Abstract
1. Introduction
2. Materials and Methods
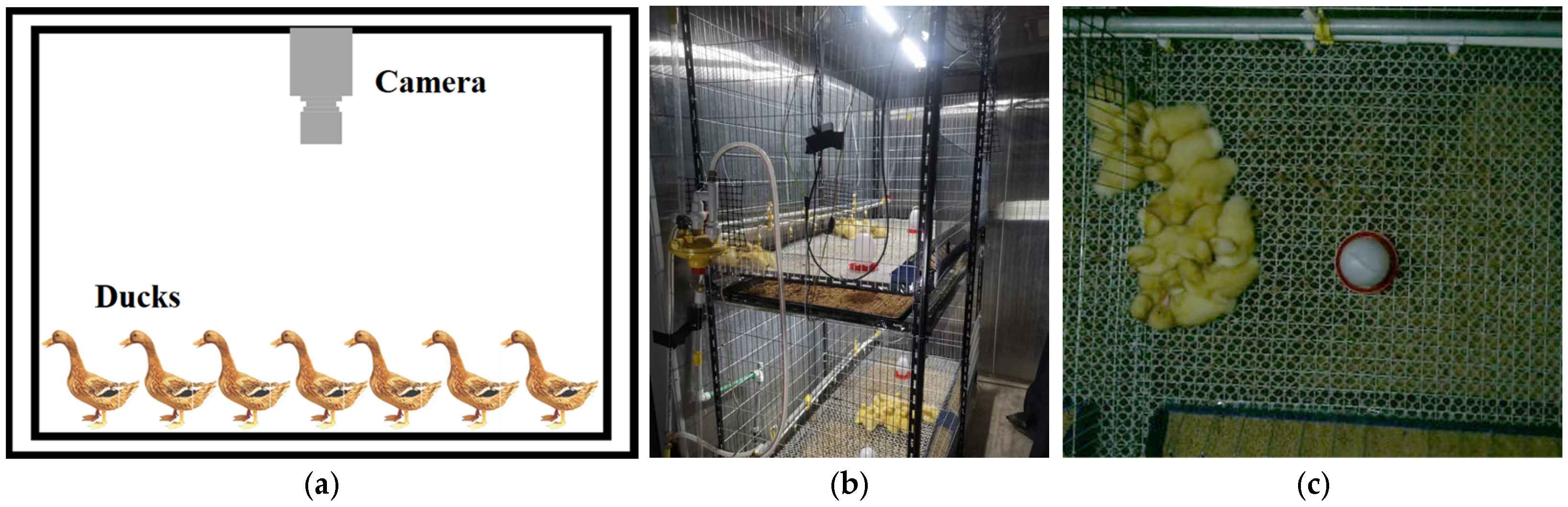
2.1. Experimental Design and Data Acquisition
2.2. Datasets Preparation
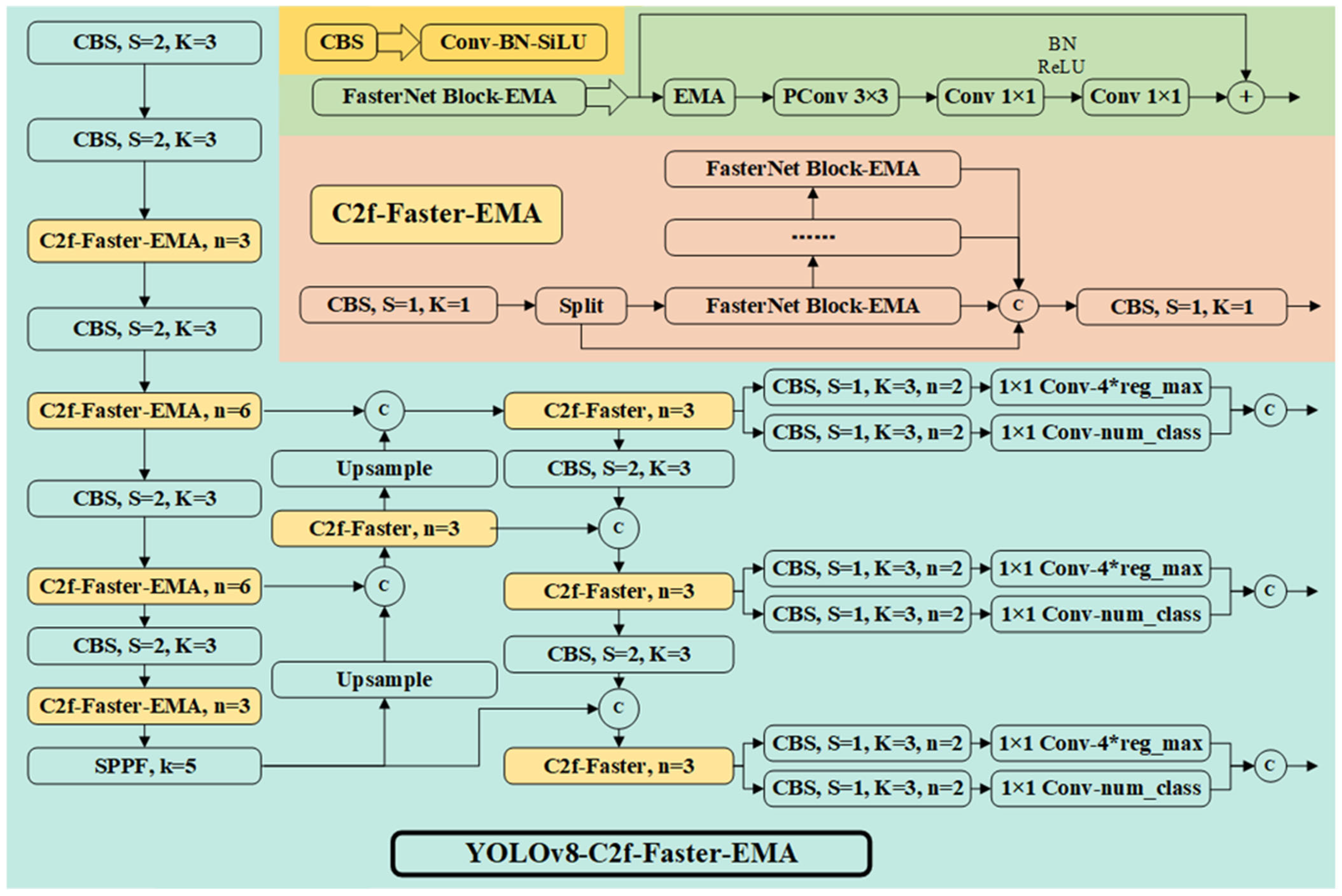
2.3. YOLOv8 Network Structure
2.4. YOLOv8 Model Improvement Strategy
2.4.1. C2f-Faster Module
2.4.2. Efficient Multi-Scale Attention Module
2.5. Method for Calculating Activeness of Meat Ducks
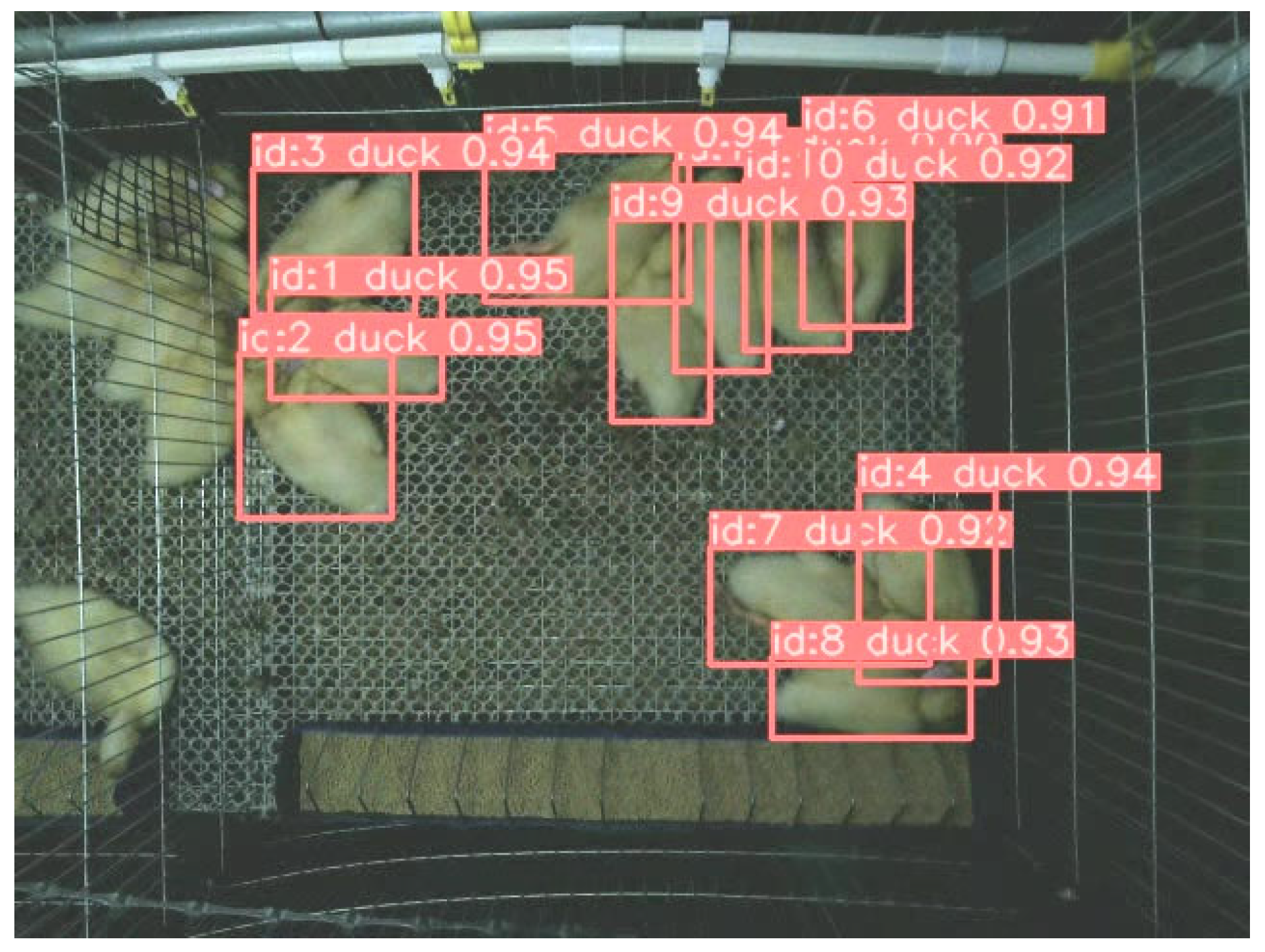
2.5.1. MOT in Group-Raised Meat Ducks
- (1)
- Calculate the confidence scores of meat duck detection boxes based on the improved YOLOv8x algorithm. Discard detection boxes with confidence scores below 0.1, categorize those with scores between 0.1 and 0.45 as low-confidence detection boxes, and classify those with scores above 0.45 as high-confidence detection boxes.
- (2)
- In the first matching step, match high-scoring detection boxes with previously tracked trajectories and obtain predicted target trajectories using Kalman filters.
- (3)
- In the second matching step, match low-scoring detection boxes with trajectories that were not matched in the first step.
- (4)
- Match the remaining detection boxes from both matching steps with newly appearing trajectories during the tracking process.
- (5)
- Retain the remaining tracking trajectories for 30 frames and attempt matching when the target box reappears; otherwise, discard the trajectory.
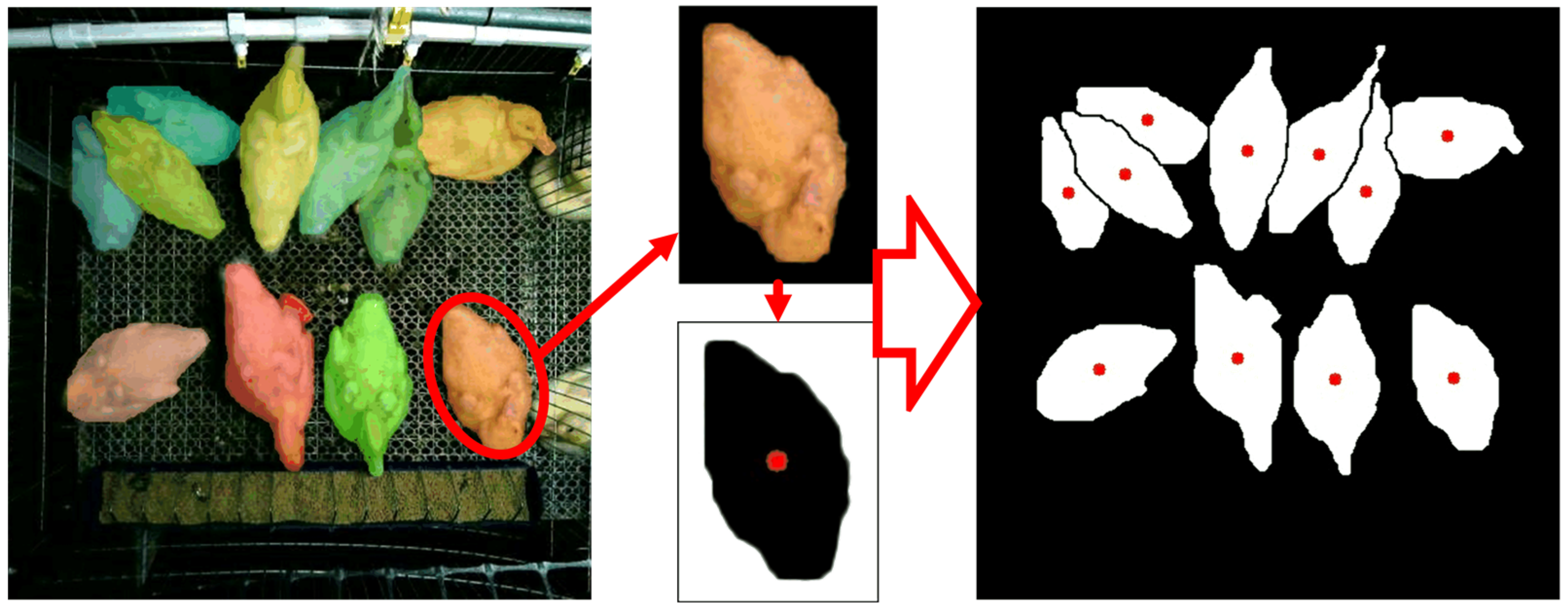
2.5.2. Mask Segmentation and Centroid Coordinate Extraction for Meat Duck
2.6. Algorithm Platform
3. Results and Discussion
3.1. Performance Evaluation of Machine Vision Algorithm Models
3.2. Experimental Comparison of Model Performance
3.2.1. Object Detection Performance for Improved YOLOv8
3.2.2. MOT Performance for Improved YOLOv8
3.3. Impact of Photoperiod on the Activeness of Meat Ducks
4. Discussion
- (1)
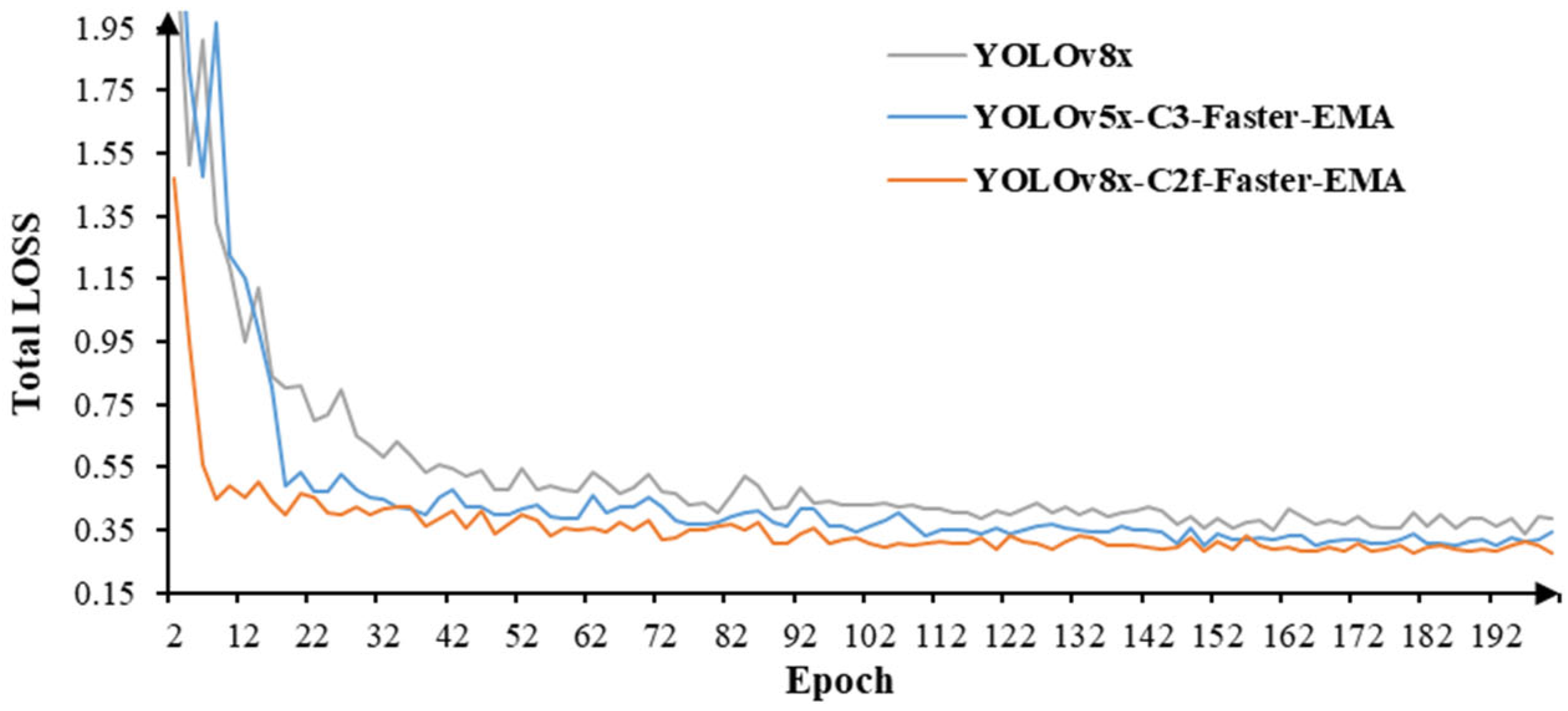
- Based on YOLOv8, the C2f-Faster-EMA module was introduced to optimize the backbone network, neck, and head. The training performance of the improved YOLOv8, YOLOv8, and the improved YOLOv5 on the same meat duck dataset was compared. The results showed that the improved YOLOv8 in this paper had better performance in the complex environment of group-raised meat ducks. The mAP50-90 performance of the target detection was 0.979, which was 1.45% and 2.73% higher than that of YOLOv8 and the improved YOLOv5, respectively.
- (2)
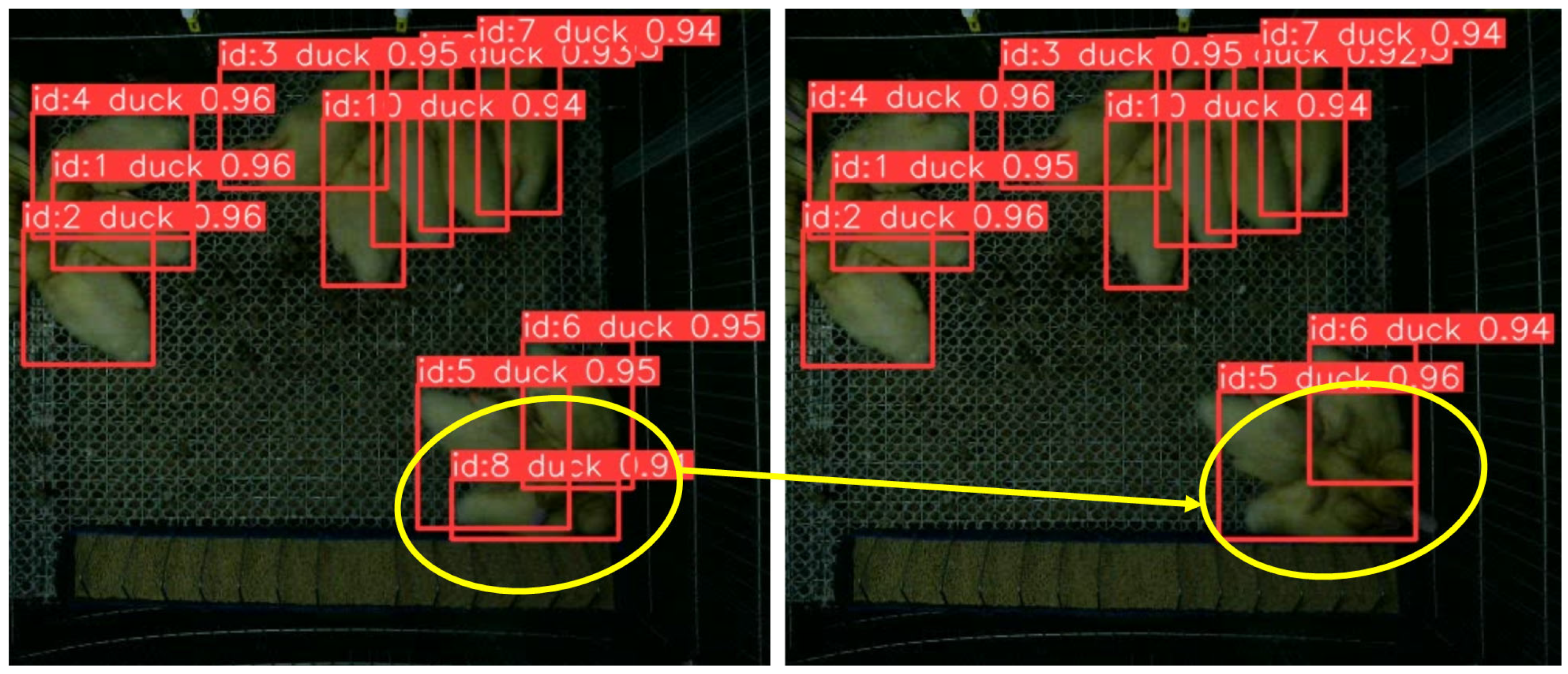
- Based on the improved YOLOv8 model, a MOT model based on Bot-SORT was constructed to achieve real-time tracking of group-raised meat ducks. With the same detector, the tracking performance of two other MOT model algorithms, DeepSORT and ByteTrack, was compared. The results showed that the improved YOLOv8+Bot-SORT model constructed in this paper had better tracking performance with a MOTA of 85.1%, which was 8.2% and 4.5% higher than that of DeepSORT and ByteTrack, respectively.
- (3)
- This study built an instance segmentation model based on the improved YOLOv8, and used OpenCV technology to extract the centroid coordinates of the duck masks instead of the center point of the multi-target tracking regression box as the representative feature point of the meat duck, which achieved higher tracking accuracy of the meat duck’s position.
- (4)
- Based on the constructed model for calculating the activeness of meat ducks, this study used the SFAD of meat ducks as the indicator for calculating activeness. A monitoring experimental platform for the activeness of meat ducks was built, and a 35-day breeding experiment was conducted to verify the effects of three photoperiods (24L:0D, 16L:8D, and 12L:12D) on the activeness of meat ducks. The results showed that the model constructed in this study could effectively calculate the activeness of meat ducks. During the experimental period, the meat duck group with the 24L:0D photoperiod had the highest SFAD, which could be considered to have the highest activeness. However, compared with the meat duck group with the 12L:12D photoperiod, it was found that the 24L:0D photoperiod was likely to be a greater stimulus on meat ducks, resulting in a significant decrease in the growth rate of meat duck activeness in the later stage of breeding. The meat duck group with a natural lighting duration (12L:12D photoperiod) showed lower activeness in the initial stage of breeding, but with increasing age, their activeness increased the most, and the overall activeness was close to that of the 24L:0D photoperiod meat duck group, with less stress. Therefore, in commercial farming, from the perspective of meat duck activeness, a 12L:12D photoperiod is more beneficial for meat duck growth than a 24L:0D photoperiod.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Olanrewaju, H.A.; Thaxton, J.P.; Dozier, W.A.; Purswell, J.; Roush, W.B.; Branton, S.L. A Review of Lighting Programs for Broiler Production. Int. J. Poult. Sci. 2006, 5, 301–308. [Google Scholar] [CrossRef]
- Zawilska, J.B.; Lorenc, A.; Berezińska, M.; Vivien-Roels, B.; Pévet, P.; Skene, D.J. Diurnal and circadian rhythms in melatonin synthesis in the turkey pineal gland and retina. Gen. Comp. Endocr. 2006, 145, 162–168. [Google Scholar] [CrossRef] [PubMed]
- Zawilska, J.B.; Lorenc, A.; Berezińska, M.; Vivien-Roels, B.; Pévet, P.; Skene, D.J. Photoperiod-Dependent Changes in Melatonin Synthesis in the Turkey Pineal Gland and Retina. Poult. Sci. 2007, 86, 1397–1405. [Google Scholar] [CrossRef] [PubMed]
- Kim, H.-J.; Son, J.; Jeon, J.-J.; Kim, H.-S.; Yun, Y.-S.; Kang, H.-K.; Hong, E.-C.; Kim, J.-H. Effects of Photoperiod on the Performance, Blood Profile, Welfare Parameters, and Carcass Characteristics in Broiler Chickens. Animal 2022, 12, 2290. [Google Scholar] [CrossRef] [PubMed]
- Baykalir, Y.; Simsek, U.G.; Erisir, M.; Otlu, O.; Gungoren, G.; Gungoren, A.; Aslan, S. Photoperiod effects on carcass traits, meat quality, and stress response in heart and lung of broilers. S. Afr. J. Anim. Sci. 2020, 50, 138–149. [Google Scholar] [CrossRef]
- MacDougall-Shackleton, S.A.; Hahn, T.P. Adaptation and evolution of photoperiod response systems in birds. J. Ornithol. 2007, 148, 219–224. [Google Scholar] [CrossRef]
- Vermette, C.; Schwean-Lardner, K.; Gomis, S.; Grahn, B.H.; Crowe, T.G.; Classen, H.L. The impact of graded levels of day length on turkey health and behavior to 18 weeks of age. Poult. Sci. 2016, 95, 1223–1237. [Google Scholar] [CrossRef] [PubMed]
- Olanrewaju, H.A.; Purswell, J.L.; Collier, S.D.; Branton, S. Interactive effects of photoperiod and light intensity on blood physiological and biochemical reactions of broilers grown to heavy weights. Poult. Sci. 2013, 92, 1029–1039. [Google Scholar] [CrossRef] [PubMed]
- Julian, R.J. Physiological, management and environmental triggers of the ascites syndrome: A review. Avian Pathol. 2000, 29, 519–527. [Google Scholar] [CrossRef] [PubMed]
- House, G.M.; Sobotik, E.B.; Nelson, J.R.; Archer, G. Pekin duck productivity, physiological stress, immune response and behavior under 20L:4D and 16L:8D photoperiods. Appl. Anim. Behav. Sci. 2021, 240, 105351. [Google Scholar] [CrossRef]
- Erdem, E.; Onbaşilar, E.E.; Hacan, Ö.G. Effects of 16L: 8D photoperiod on growth performance, carcass characteristics, meat composition, and blood parameters of Pekin ducks. Turk. J. Vet. Anim. Sci. 2015, 39, 568–575. [Google Scholar] [CrossRef]
- Yang, X.; Zhao, Y.; Gan, H.; Hawkins, S.; Eckelkamp, L.; Prado, M.; Burns, R.; Purswell, J.; Tabler, T. Modeling gait score of broiler chicken via production and behavioral data. Animal 2023, 17, 100692. [Google Scholar] [CrossRef] [PubMed]
- Leroy, T.; Vranken, E.; Struelens, E.; Berckmans, D. Computer Vision Based Recognition of Behavior Phenotypes of Laying Hens. In Proceedings of the 2005 ASAE Annual Meeting, Tampa, FL, USA, 17–20 July 2005; p. 1. [Google Scholar]
- Dawkins, M.S.; Lee, H.; Waitt, C.D.; Roberts, S.J. Optical flow patterns in broiler chicken flocks as automated measures of behaviour and gait. Appl. Anim. Behav. Sci. 2009, 119, 203–209. [Google Scholar] [CrossRef]
- Lao, F.D.; Du, X.D.; Teng, G.H. Automatic recognition method of laying hen behaviors based on depth Image processing. Trans. CSAM 2017, 48, 155–162. [Google Scholar]
- Yang, X.; Huo, X.; Li, G.; Purswell, J.L.; Tabler, G.T.; Chesser, G.D.; Magee, C.L.; Zhao, Y. Effects of elevated platform and robotic vehicle on broiler production, welfare, and housing environment. Trans. ASABE 2020, 63, 1981–1990. [Google Scholar] [CrossRef]
- Guo, Y.; Chai, L.; Aggrey, S.E.; Oladeinde, A.; Johnson, J.; Zock, G. A Machine Vision-Based Method for Monitoring Broiler Chicken Floor Distribution. Sensors 2020, 20, 3179. [Google Scholar] [CrossRef] [PubMed]
- Sowmya, S.; Paily, R. FPGA implementation of image enhancement algorithms. In Proceedings of the 2011 International Conference on Communications and Signal Processing, Kerala, India, 10–12 February 2011; pp. 584–588. [Google Scholar]
- Terven, J.; Cordova-Esparza, D. A comprehensive review of YOLO: From YOLOv1 to YOLOv8 and beyond. arXiv 2023, arXiv:2304.00501. [Google Scholar]
- Riego Del Castillo, V.; García Sierra, J.F.; Sánchez-González, L. Adapting YOLOv8 as a Vision-Based Animal Detection System to Facilitate Herding. In Proceedings of the International Conference on Hybrid Artificial Intelligence Systems, Salamanca, Spain, 5–7 September 2023; pp. 603–610. [Google Scholar]
- Wang, C.; Alexey, B.; Hong-Yuan, L. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 17–24 June 2023; pp. 7464–7475. [Google Scholar]
- Chen, J.; Kao, S.H.; He, H.; Zhuo, W.; Wen, S.; Lee, C.H.; Chan, S.H.G. Run, Don’t Walk: Chasing Higher FLOPS for Faster Neural Networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 17–24 June 2023; pp. 12021–12031. [Google Scholar]
- Ouyang, D.; He, S.; Zhang, G.; Luo, M.; Guo, H.; Zhan, J.; Huang, Z. Efficient Multi-Scale Attention Module with Cross-Spatial Learning. In Proceedings of the ICASSP 2023—2023 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Rhodes Island, Greece, 4–10 June 2023; pp. 1–5. [Google Scholar]
- Woo, S.; Park, J.; Lee, J.Y.; Kweon, I.S. Cbam: Convolutional block attention module. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 3–19. [Google Scholar]
- Hu, J.; Li, S.; Gang, S. Squeeze-and-excitation networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 7132–7141. [Google Scholar]
- Aharon, N.; Orfaig, R.; Bobrovsky, B. BoT-SORT: Robust associations multi-pedestrian tracking. arXiv 2022, arXiv:2206.14651. [Google Scholar]
- Veeramani, B.; Raymond, J.W.; Chanda, P. DeepSort: Deep convolutional networks for sorting haploid maize seeds. BMC Bioinform. 2018, 19, 1–9. [Google Scholar] [CrossRef] [PubMed]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask R-CNN. In Proceedings of the IEEE International Conference on Computer vision, Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar]
- Ronneberger, O.; Fischer, F.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention—MICCAI 2015: 18th International Conference, Munich, Germany, 5–9 October 2015; pp. 234–241. [Google Scholar]
- Zhang, Y.; Sun, P.; Jiang, Y.; Yu, D.; Weng, F.; Yuan, Z.; Luo, P.; Liu, W.; Wang, X. Bytetrack: Multi-object tracking by associating every detection box. In Proceedings of the European Conference on Computer Vision, Tel Aviv, Israel, 23–27 October 2022; pp. 1–21. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | mAP@50-95 | Recall | Time (ms/f) |
|---|---|---|---|
| YOLOv8x | 0.953 | 0.996 | 66.4 |
| YOLOv5x + C3-Faster-EMA | 0.965 | 0.997 | 56.9 |
| YOLOv8x + C2f-Faster-EMA | 0.979 | 0.997 | 67.0 |
| Tracking Model | YOLOv8 + DeepSORT | YOLOv8 + ByteTrack | YOLOv8 + Bot-SORT |
|---|---|---|---|
| RMOTA | 0.769 | 0.806 | 0.851 |
| Execution time (ms/f) | 103.5 | 88.4 | 121.8 |
| Photoperiod | Camera ID | SFAD (Caged) | SFAD (Photoperiod) |
|---|---|---|---|
| 24L:0D | Camera0 | 0.975 | 1.003 |
| Camera1 | 1.041 | ||
| Camera2 | 0.995 | ||
| 16L:8D | Camera3 | 0.856 | 0.906 |
| Camera4 | 0.953 | ||
| Camera5 | 0.909 | ||
| 12L:12D | Camera6 | 1.002 | 0.983 |
| Camera7 | 0.863 | ||
| Camera8 | 1.085 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duan, E.; Han, G.; Zhao, S.; Ma, Y.; Lv, Y.; Bai, Z. Regulation of Meat Duck Activeness through Photoperiod Based on Deep Learning. Animals 2023, 13, 3520. https://doi.org/10.3390/ani13223520
Duan E, Han G, Zhao S, Ma Y, Lv Y, Bai Z. Regulation of Meat Duck Activeness through Photoperiod Based on Deep Learning. Animals. 2023; 13(22):3520. https://doi.org/10.3390/ani13223520
Chicago/Turabian StyleDuan, Enze, Guofeng Han, Shida Zhao, Yiheng Ma, Yingchun Lv, and Zongchun Bai. 2023. "Regulation of Meat Duck Activeness through Photoperiod Based on Deep Learning" Animals 13, no. 22: 3520. https://doi.org/10.3390/ani13223520
APA StyleDuan, E., Han, G., Zhao, S., Ma, Y., Lv, Y., & Bai, Z. (2023). Regulation of Meat Duck Activeness through Photoperiod Based on Deep Learning. Animals, 13(22), 3520. https://doi.org/10.3390/ani13223520