Developing a Simulated Online Model That Integrates GNSS, Accelerometer and Weather Data to Detect Parturition Events in Grazing Sheep: A Machine Learning Approach

 ,
,
Abstract
Simple Summary
Abstract
1. Introduction
2. Materials and Methods
2.1. Location and Animals
2.2. Instrumentation
2.3. Observation
2.4. Data Management and Analysis
2.5. GNSS Data
2.6. Accelerometer Data
2.7. Integrating GNSS, Accelerometer and Weather Data
2.7.1. Features Derived from Prior Research
2.7.2. Peer-Based Features Comparing the Individual to the Flock
2.7.3. Temporal Comparison of Features
2.8. Development of a Simulated Online Parturition Detection Model Using Machine Learning
2.8.1. Training Dataset
2.8.2. Validation Dataset
2.8.3. Part A: Simulated Online Parturition Detection ML Development and Evaluation
2.8.4. Part B: Validation of the Parturition Detection Model
3. Results
3.1. Data and Lambing Records
3.2. Weather Records
3.3. Part A: Simulated Online Parturition Detection ML Development and Evaluation
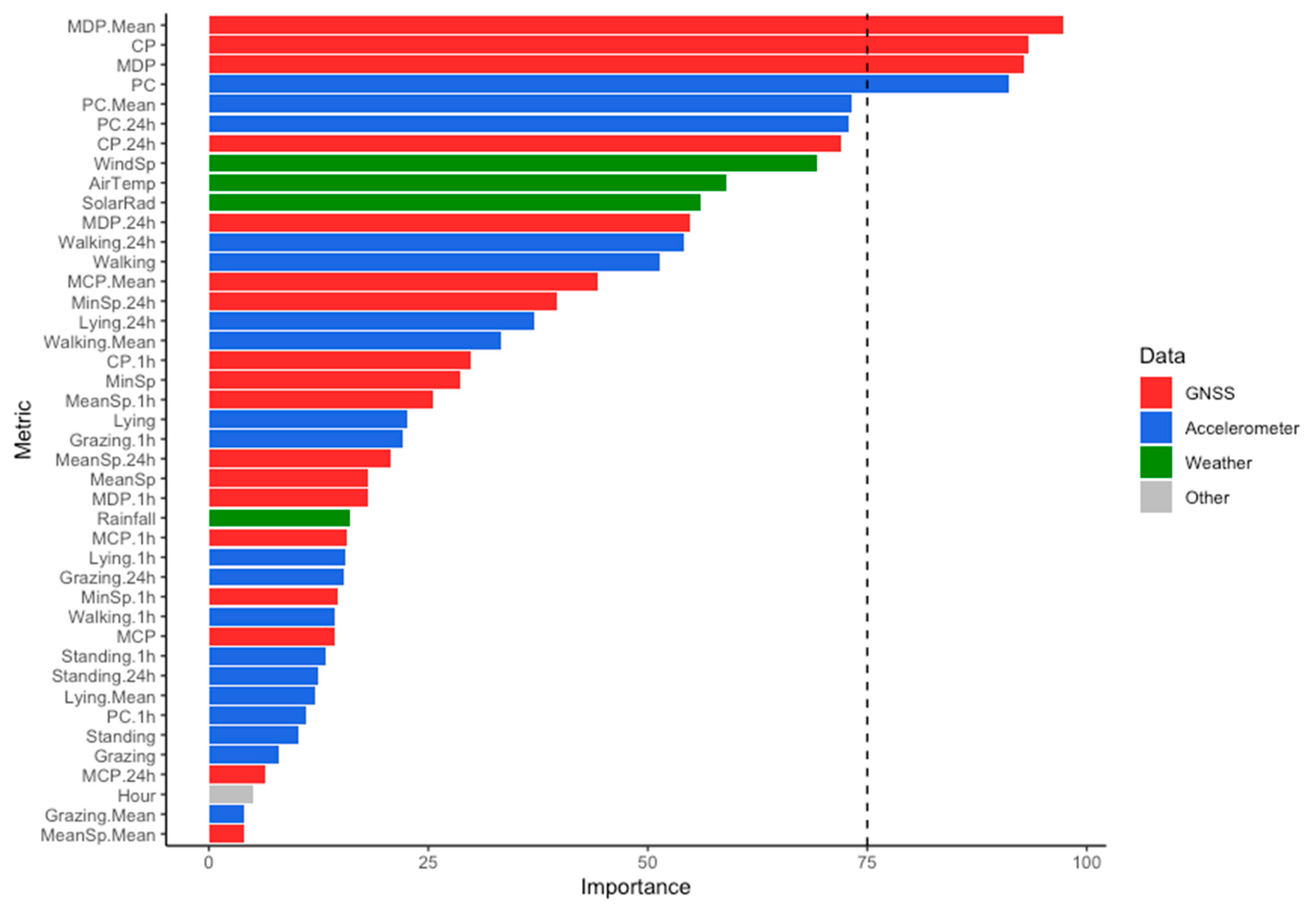
3.3.1. Feature Importance
3.3.2. ML Evaluation
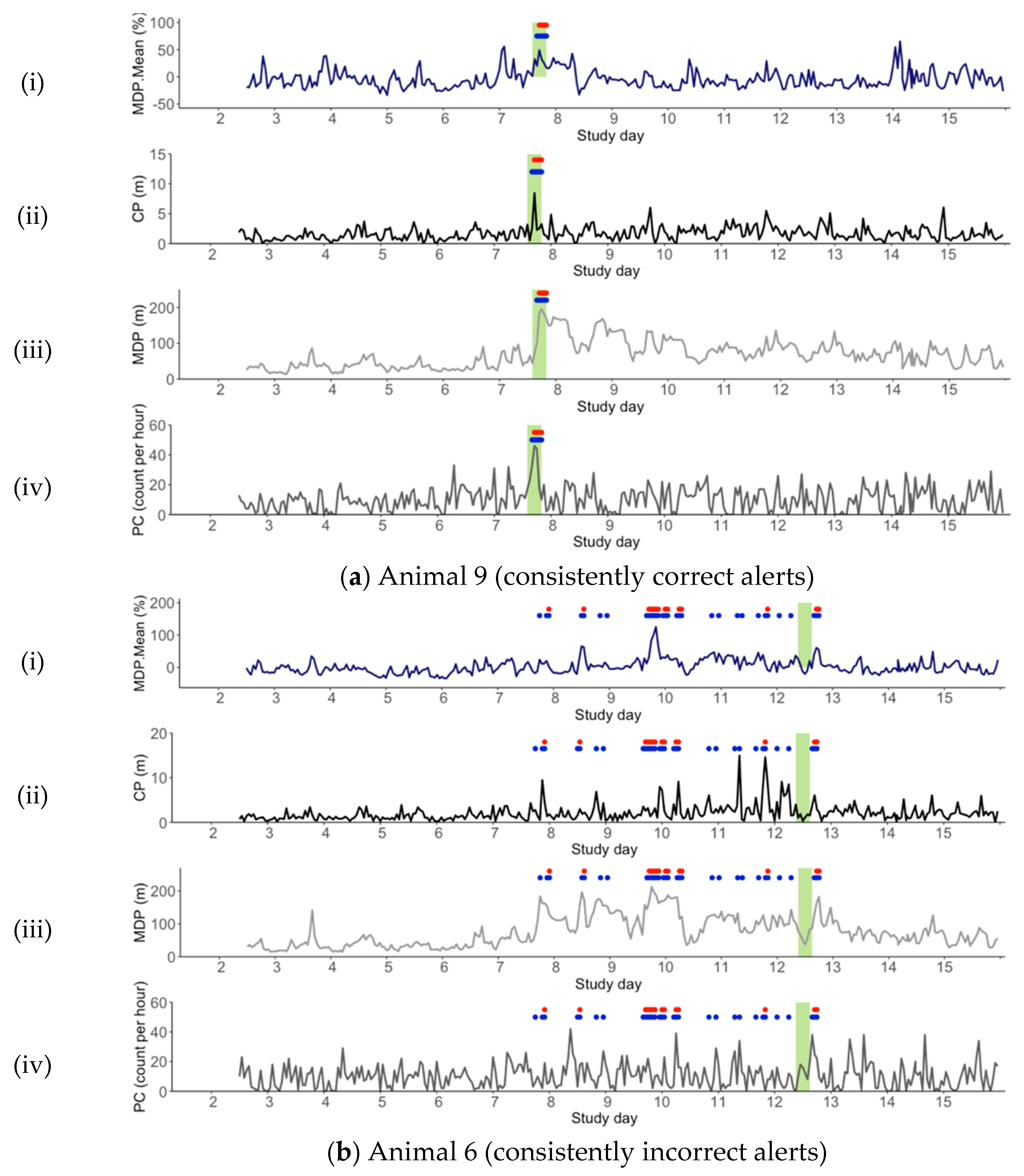
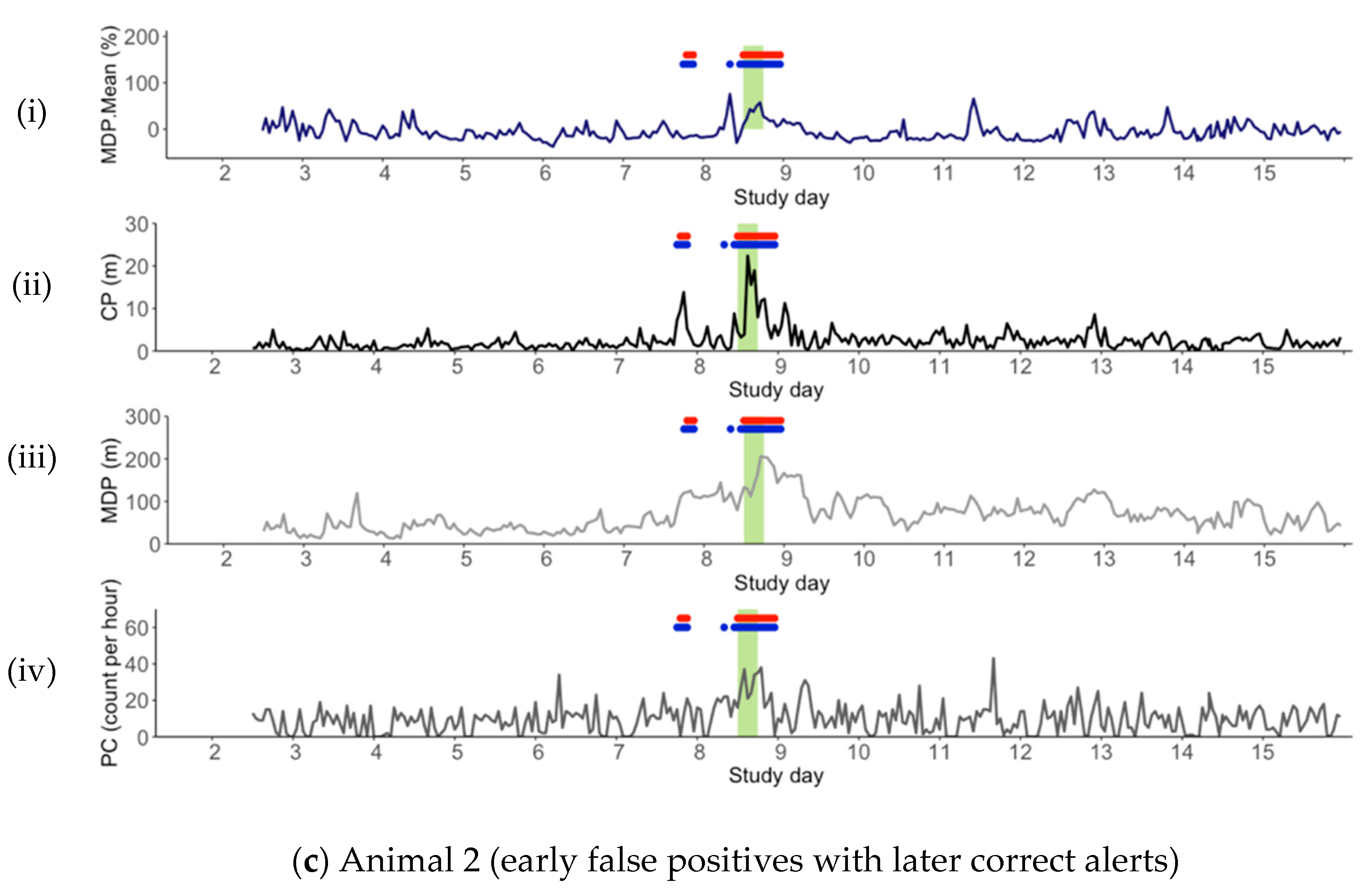
3.4. Part B: Validation of the Parturition Detection Model
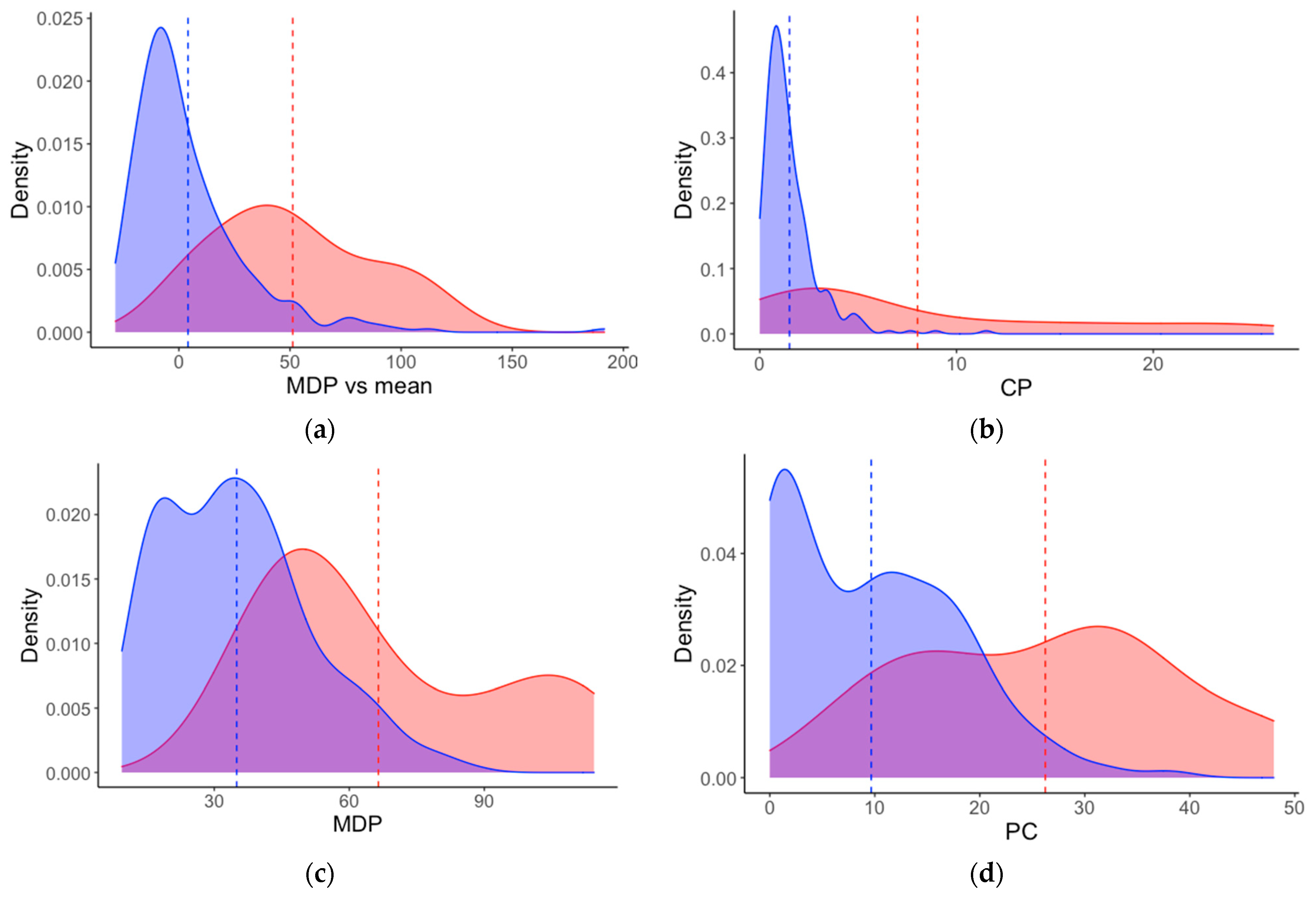
Misclassification—Why Is It Occurring?
4. Discussion
4.1. Feature Importance for Lambing Detection
4.2. Detection of Parturition and Implications for Commercial Application
4.3. Understanding the Limitations and Reasons for Model Failure
4.4. Recommendations for Future Research
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fogarty, E.S.; Swain, D.L.; Cronin, G.M.; Trotter, M. Autonomous on-animal sensors in sheep research: A systematic review. Comput. Electron. Agric. 2018, 150, 245–256. [Google Scholar] [CrossRef]
- Neethirajan, S. Recent advances in wearable sensors for animal health management. Sens. Biosens. Res. 2017, 12, 15–29. [Google Scholar] [CrossRef]
- Wathes, C.M.; Kristensen, H.H.; Aerts, J.M.; Berckmans, D. Is precision livestock farming an engineer’s daydream or nightmare, an animal’s friend or foe, and a farmer’s panacea or pitfall? Comput. Electron. Agric. 2008, 64, 2–10. [Google Scholar] [CrossRef]
- Dobos, R.C.; Dickson, S.; Bailey, D.W.; Trotter, M.G. The use of GNSS technology to identify lambing behaviour in pregnant grazing Merino ewes. Anim. Prod. Sci. 2014, 54, 1722–1727. [Google Scholar] [CrossRef]
- Dobos, R.C.; Taylor, D.B.; Trotter, M.G.; McCorkell, B.E.; Schneider, D.A.; Hinch, G.N. Characterising activities of free-ranging Merino ewes before, during and after lambing from GNSS data. Small Rumin. Res. 2015, 131, 12–16. [Google Scholar] [CrossRef]
- Fogarty, E.S.; Swain, D.; Cronin, G.M.; Moraes, L.E.; Bailey, D.W.; Trotter, M. Potential for autonomous detection of lambing using Global Navigation Satellite System technology. Anim. Prod. Sci. 2020, 60, 1217–1226. [Google Scholar] [CrossRef]
- Manning, J.K.; Fogarty, E.S.; Trotter, M.G.; Schneider, D.A.; Thomson, P.C.; Bush, R.D.; Cronin, G.M. A pilot study into the use of global navigation satellite system technology to quantify the behavioural responses of sheep during simulated dog predation events. Anim. Prod. Sci. 2014, 54, 1676–1681. [Google Scholar] [CrossRef]
- Fogarty, E.S.; Manning, J.K.; Trotter, M.G.; Schneider, D.A.; Thomson, P.C.; Bush, R.D.; Cronin, G.M. GNSS technology and its application for improved reproductive management in extensive sheep systems. Anim. Prod. Sci. 2015, 55, 1272–1280. [Google Scholar] [CrossRef]
- Barwick, J.; Lamb, D.; Dobos, R.; Welch, M.; Trotter, M. Categorising sheep activity using a tri-axial accelerometer. Comput. Electron. Agric. 2018, 145, 289–297. [Google Scholar] [CrossRef]
- Fogarty, E.S.; Swain, D.L.; Cronin, G.M.; Moraes, L.E.; Trotter, M. Behaviour classification of extensively grazed sheep using machine learning. Comput. Electron. Agric. 2020, 169, 105175. [Google Scholar] [CrossRef]
- Alvarenga, F.A.P.; Borges, I.; Palkovič, L.; Rodina, J.; Oddy, V.H.; Dobos, R.C. Using a three-axis accelerometer to identify and classify sheep behaviour at pasture. Appl. Anim. Behav. Sci. 2016, 181, 91–99. [Google Scholar] [CrossRef]
- Decandia, M.; Giovanetti, V.; Molle, G.; Acciaro, M.; Mameli, M.; Cabiddu, A.; Cossu, R.; Serra, M.G.; Manca, C.; Rassu, S.P.G.; et al. The effect of different time epoch settings on the classification of sheep behaviour using tri-axial accelerometry. Comput. Electron. Agric. 2018, 154, 112–119. [Google Scholar] [CrossRef]
- Giovanetti, V.; Decandia, M.; Molle, G.; Acciaro, M.; Mameli, M.; Cabiddu, A.; Cossu, R.; Serra, M.G.; Manca, C.; Rassu, S.P.G.; et al. Automatic classification system for grazing, ruminating and resting behaviour of dairy sheep using a tri-axial accelerometer. Livest. Sci. 2017, 196, 42–48. [Google Scholar] [CrossRef]
- Spink, A.; Cresswell, B.; Kolzsch, A.; van Langevelde, F.; Neefjes, M.; Noldus, P.J.J.; van Oeveren, H.; Prins, H.; van der Wal, T.; de Weerd, N.; et al. Animal behaviour analysis with GPS and 3D accelerometers. In Proceedings of the European Conference on Precision Livestock Farming, Leuven, Belgium, 10–12 October 2013; pp. 229–239. [Google Scholar]
- Dewhirst, O.P.; Evans, H.K.; Roskilly, K.; Harvey, R.J.; Hubel, T.Y.; Wilson, A.M. Improving the accuracy of estimates of animal path and travel distance using GPS drift-corrected dead reckoning. Ecol. Evol. 2016, 6, 6210–6222. [Google Scholar] [CrossRef] [PubMed]
- Barker, Z.E.; Vázquez Diosdado, J.A.; Codling, E.A.; Bell, N.J.; Hodges, H.R.; Croft, D.P.; Amory, J.R. Use of novel sensors combining local positioning and acceleration to measure feeding behavior differences associated with lameness in dairy cattle. Int. J. Dairy Sci. Process. 2018, 101, 6310–6321. [Google Scholar] [CrossRef] [PubMed]
- González, L.A.; Bishop-Hurley, G.; Henry, D.; Charmley, E. Wireless sensor networks to study, monitor and manage cattle in grazing systems. Anim. Prod. Sci. 2014, 54, 1687–1693. [Google Scholar] [CrossRef]
- Thomas, D.T.; Wilmot, M.G.; Alchin, M.; Masters, D.G. Preliminary indications that Merino sheep graze different areas on cooler days in the Southern Rangelands of Western Australia. Aust. J. Exp. Agric. 2008, 48, 889–892. [Google Scholar] [CrossRef]
- Goddard, P.; Waterhouse, T.; Dwyer, C.; Stott, A. The perception of the welfare of sheep in extensive systems. Small Rumin. Res. 2006, 62, 215–225. [Google Scholar] [CrossRef]
- Neethirajan, S. Transforming the adaptation physiological of farm animals through sensors. Animals 2020, 10, 1512. [Google Scholar] [CrossRef]
- Bailey, D.W.; Trotter, M.G.; Knight, C.W.; Thomas, M.G. Use of GPS tracking collars and accelerometers for rangeland livestock production research. Transl. Anim. Sci. 2018, 2, 81–88. [Google Scholar] [CrossRef]
- Aminikhanghahi, S.; Cook, D.J. A survey of methods for time series change point detection. Knowl. Inf. Syst. 2017, 51, 339–367. [Google Scholar] [CrossRef]
- ur Rehman, M.H.; Liew, C.S.; Abbas, A.; Jayaraman, P.P.; Wah, T.Y.; Khan, S.U. Big Data Reduction Methods: A Survey. Data Sci. Eng. 2016, 1, 265–284. [Google Scholar] [CrossRef]
- Vázquez-Diosdado, J.A.; Paul, V.; Ellis, A.K.; Coates, D.; Loomba, R.; Kaler, J. A combined offline and online algorithm for real-time and long-term classification of sheep behaviour: Novel approach for precision livestock farming. Sensors 2019, 19, 3201. [Google Scholar] [CrossRef]
- Handcock, R.N.; Swain, D.L.; Bishop-Hurley, G.J.; Patison, K.P.; Wark, T.; Valencia, P.; Corke, P.; O’Neill, C.J. Monitoring Animal Behaviour and Environmental Interactions Using Wireless Sensor Networks, GPS Collars and Satellite Remote Sensing. Sensors 2009, 9, 3586–3603. [Google Scholar] [CrossRef] [PubMed]
- Swain, D.L.; Friend, M.A.; Bishop-Hurley, G.J.; Handcock, R.N.; Wark, T. Tracking livestock using global positioning systems—Are we still lost? Anim. Prod. Sci. 2011, 51, 167–175. [Google Scholar] [CrossRef]
- Trotter, M. Precision agriculture for pasture, rangeland and livestock systems. In Proceedings of the Food Security for Sustainable Agriculture: Proceedings of the 15th Australian Agronomy Conference, Lincoln, New Zealand, 15–18 November 2010. [Google Scholar]
- Alexander, G. Husbandry practices in relation to maternal offspring behaviour. In Proceedings of the Reviews in Rural Science, Armidale, NSW, Australia, 4 August 1973; pp. 99–107. [Google Scholar]
- Alexander, G. What makes a good mother? Components and comparative aspects of maternal behaviour in ungulates. In Proceedings of the Australian Society of Animal Production Thirteenth Biennial Conference, Perth, Australia, 1 August 1980; pp. 25–41. [Google Scholar]
- Hinch, G.N.; Brien, F. Lamb survival in Australian flocks: A review. Anim. Prod. Sci. 2014, 54, 656–666. [Google Scholar] [CrossRef]
- Dobos, R.C.; Taylor, D.B.; Trotter, M.G.; Hinch, G.N. Can home range be used as an identifier of lambing for grazing pregnant Merino ewes? In Proceedings of the 29th Biennial Conference of the Australian Society of Animal Production, Christchurch, New Zealand, 2–5 July 2012; p. 47. [Google Scholar]
- Schmoelzl, S.; Little, B.; McNally, J.; Small, A.; Ingham, A. Development of a remote sensing device to detect duration of parturition in ewes. In Proceedings of the 31st Biennial Conference of the Australian Society of Animal Production, Adelaide, Australia, 4–7 July 2016; pp. 207–208. [Google Scholar]
- Fogarty, E.S.; Swain, D.; Cronin, G.M.; Moraes, L.E.; Trotter, M. Can accelerometer ear tags identify behavioural changes in sheep associated with parturition? Anim. Reprod. Sci. 2020, 216, 106345. [Google Scholar] [CrossRef] [PubMed]
- Miller, G.A.; Mitchell, M.; Barker, Z.E.; Giebel, K.; Codling, E.A.; Amory, J.R.; Michie, C.; Davison, C.; Tachtatzis, C.; Andonovic, I.; et al. Using animal-mounted sensor technology and machine learning to predict time-to-calving in beef and dairy cows. Animal 2020, 14, 1304–1312. [Google Scholar] [CrossRef] [PubMed]
- Traulsen, I.; Scheel, C.; Auer, W.; Burfeind, O.; Krieter, J. Using acceleration data to automatically detect the onset of farrowing in sows. Sensors 2018, 18, 170. [Google Scholar] [CrossRef]
- Cornou, C.; Lundbye-Christensen, S. Modeling of sows diurnal activity pattern and detection of parturition using acceleration measurements. Comput. Electron. Agric. 2012, 80, 97–104. [Google Scholar] [CrossRef]
- Norton, T.; Piette, D.; Exadaktylos, V.; Berckmans, D. Automated real-time stress monitoring of police horses using wearable technology. Appl. Anim. Behav. Sci. 2018, 198, 67–74. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing; R Core Team: Vienna, Austria, 2018. [Google Scholar]
- Anderson, D.M.; Estell, R.E.; Cibils, A.F. Spatiotemporal Cattle Data—A Plea for Protocol Standardization. Positioning 2013, 4, 115–136. [Google Scholar] [CrossRef]
- McGranahan, D.A.; Geaumont, B.; Spiess, J.W. Assessment of a livestock GPS collar based on an open-source datalogger informs best practices for logging intensity. Ecol. Evol. 2018, 8, 5649–5660. [Google Scholar] [CrossRef]
- Trotter, M.G.; Lamb, D.W.; Hinch, G.N.; Guppy, C.N. Global navigation satellite system livestock tracking: System development and data interpretation. Anim. Prod. Sci. 2010, 50, 616–623. [Google Scholar] [CrossRef]
- Turner, L.W.; Udal, M.C.; Larson, B.T.; Shearer, S.A. Monitoring cattle behavior and pasture use with GPS and GIS. Can. J. Anim. Sci. 2000, 80, 405–413. [Google Scholar] [CrossRef]
- Calenge, C. The package adehabitat for the R software: A tool for the analysis of space and habitat use by animals. Ecol. Model. 2006, 197, 516–519. [Google Scholar] [CrossRef]
- Hijmans, R.J. Geosphere: Spherical Trigonometry. R Package Version 1.5-10. Available online: https://CRAN.R-project.org/package=geosphere (accessed on 23 March 2020).
- Burgman, M.A.; Fox, J.C. Bias in species range estimates from minimum convex polygons: Implications for conservation and options for improved planning. Anim. Conserv. 2003, 6, 19–28. [Google Scholar] [CrossRef]
- Morris, G.; Conner, L.M. Assessment of accuracy, fix success rate and use of estimated horizontal position error (EHPE) to filter inaccurate data collected by a common commercially available GPS logger. PLoS ONE 2017, 12, e0189020. [Google Scholar] [CrossRef]
- Lynch, J.J.; Hinch, G.N.; Adams, D.B. The Behaviour of Sheep. Biological Principles and Implications for Production; CSIRO Publications: Armidale, Australia, 1992. [Google Scholar]
- Nathan, R.; Spiegel, O.; Fortmann-Roe, S.; Harel, R.; Wikelski, M.; Getz, W.M. Using tri-axial acceleration data to identify behavioral modes of free-ranging animals: General concepts and tools illustrated for griffon vultures. J. Exp. Biol. 2012, 215, 986–996. [Google Scholar] [CrossRef]
- Barwick, J.; Lamb, D.; Dobos, R.; Schneider, D.; Welch, M.; Trotter, M. Predicting lameness in sheep activity using tri-axial acceleration signals. Animals 2018, 8, 12. [Google Scholar] [CrossRef]
- Walton, E.; Casey, C.; Mitsch, J.; Vázquez-Diosdado, J.A.; Yan, J.; Dottorini, T.; Ellis, K.A.; Winterlich, A.; Kaler, J. Evaluation of sampling frequency, window size and sensor position for classification of sheep behaviour. R. Soc. Open Sci. 2018, 5, 171442. [Google Scholar] [CrossRef] [PubMed]
- Weiss, G.M.; Provost, F. Learning When Training Data are Costly: The Effect of Class Distribution on Tree Induction. J. Artif. Intell. Res. 2003, 19, 315–354. [Google Scholar] [CrossRef]
- Joo, R.; Bertrand, S.; Tam, J.; Fablet, R. Hidden Markov Models: The Best Models for Forager Movements? PLoS ONE 2013, 8, e71246. [Google Scholar] [CrossRef] [PubMed]
- Martiskainen, P.; Järvinen, M.; Skön, J.-P.; Tiirikainen, J.; Kolehmainen, M.; Mononen, J. Cow behaviour pattern recognition using a three-dimensional accelerometer and support vector machines. Appl. Anim. Behav. Sci. 2009, 119, 32–38. [Google Scholar] [CrossRef]
- Kuhn, M. Caret: Classification and Regression Training. Available online: https://CRAN.R-project.org/package=caret (accessed on 28 June 2019).
- Kuhn, M. Variable Importance Using the Caret Package. Available online: http://btr0x2.rz.uni-bayreuth.de/math/statlib/R/CRAN/doc/vignettes/caret/caretVarImp.pdf (accessed on 9 February 2020).
- Santegoeds, O.J. Predicting Dairy Cow Parturition Using Real-Time Behavior Data from Accelerometers. A Study in Commercial Setting. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2016. [Google Scholar]
- Tang, Y.; Zhang, Y.; Chawla, N.V.; Krasser, S. SVMs Modeling for Highly Imbalanced Classification. IEEE Trans. Syst. Man Cybern. Part B 2009, 39, 281–288. [Google Scholar] [CrossRef]
- Boughorbel, S.; Jarray, F.; El-Anbari, M. Optimal classifier for imbalanced data using Matthews Correlation Coefficient metric. PLoS ONE 2017, 12, e0177678. [Google Scholar] [CrossRef]
- Yap, B.W.; Rani, K.A.; Rahman, H.A.A.; Fong, S.; Khairudin, Z.; Abdullah, N.N. An Application of Oversampling, Undersampling, Bagging and Boosting in Handling Imbalanced Datasets. In Proceedings of the First International Conference on Advanced Data and Information Engineering (DaEng-2013), Singapore, 16–18 December 2013; pp. 13–22. [Google Scholar]
- Arnold, G.W.; Morgan, P.D. Behaviour of the ewe and lamb at lambing and its relationship to lamb mortality. Appl. Anim. Ethol. 1975, 2, 25–46. [Google Scholar] [CrossRef]
- Echeverri, A.C.; Gonyou, H.W.; Ghent, A.W. Preparturient behavior of confined ewes: Time budgets, frequencies, spatial distribution and sequential analysis. Appl. Anim. Behav. Sci. 1992, 34, 329–344. [Google Scholar] [CrossRef]
- Alexander, G.; Stevens, D.; Kilgour, R.; de Langen, H.; Mottershead, B.E.; Lynch, J.J. Separation of ewes from twin lambs: Incidence in several sheep breeds. Appl. Anim. Ethol. 1983, 10, 301–317. [Google Scholar] [CrossRef]
- Broster, J.C.; Dehaan, R.L.; Swain, D.L.; Friend, M.A. Ewe and lamb contact at lambing is influenced by both shelter type and birth number. Animal 2010, 4, 796–803. [Google Scholar] [CrossRef][Green Version]
- Broster, J.C.; Dehaan, R.L.; Swain, D.L.; Robertson, S.M.; King, B.J.; Friend, M.A. Shelter type and birth number influence the birth and death sites of lambs and ewe movement around lambing time. J. Anim. Sci. 2017, 95, 81–90. [Google Scholar] [CrossRef] [PubMed]
- Arnold, G.W. Herbage intake and grazing behaviour in ewes of four breeds at different physiological states. Aust. J. Agric. Res. 1975, 26, 1017–1024. [Google Scholar] [CrossRef]
- Alexander, G.; Lynch, J.J.; Mottershead, B.E. Use of shelter and selection of lambing sites by shorn and unshorn ewes in paddocks with closely or widely spaced shelters. Appl. Anim. Ethol. 1979, 5, 51–69. [Google Scholar] [CrossRef]
- Owens, J.L.; Bindon, B.M.; Edey, T.N.; Piper, L.R. Behaviour at parturition and lamb survival of Booroola Merino sheep. Livest. Prod. Sci. 1985, 13, 359–372. [Google Scholar] [CrossRef]
- Arnold, G.W. Comparison of the time budgets and circadian patterns of maintenance activities in sheep, cattle and horses grouped together. Appl. Anim. Behav. Sci. 1984, 13, 19–30. [Google Scholar] [CrossRef]
- Arnold, G.W. The effect of the quantity and quality of pasture available to sheep on their grazing behaviour. Aust. J. Agric. Res. 1960, 11, 1034–1043. [Google Scholar] [CrossRef]
- Doyle, R.E.; Broster, J.C.; Barnes, K.; Browne, W.J. Temperament, age and weather predict social interaction in the sheep flock. Behav. Process. 2016, 131, 53–58. [Google Scholar] [CrossRef]
- Paganoni, B.; Macleay, C.; van Burgel, A.; Thompson, A. Proximity sensors fitted to ewes and rams during joining can indicate the birth date of lambs. Comput. Electron. Agric. 2020, 170, 105249. [Google Scholar] [CrossRef]
- Fogarty, E.S.; Swain, D.L.; Cronin, G.M.; Trotter, M. A systematic review of the potential uses of on-animal sensors to monitor the welfare of sheep evaluated using the Five Domains Model as a framework. Anim. Welf. 2019, 28, 407–420. [Google Scholar] [CrossRef]
- Watanabe, N.; Sakanoue, S.; Kawamura, K.; Kozakai, T. Development of an automatic classification system for eating, ruminating and resting behavior of cattle using an accelerometer. Grassl. Sci. 2008, 54, 231–237. [Google Scholar] [CrossRef]
- Gonyou, H.W. The role of behavior in sheep production: A review of research. Appl. Anim. Ethol. 1984, 11, 341–358. [Google Scholar] [CrossRef]
- Dominiak, K.N.; Kristensen, A.R. Prioritizing alarms from sensor-based detection models in livestock production—A review on model performance and alarm reducing methods. Comput. Electron. Agric. 2017, 133, 46–67. [Google Scholar] [CrossRef]
- Holmes, R.J. Relationship of parturient behaviour to reproductive efficiency of Finn sheep. Proc. N. Z. Soc. Anim. Prod. 1976, 36, 253–257. [Google Scholar]
- Bickell, S.L.; Nowak, R.; Poindron, P.; Ferguson, D.; Blache, D. Maternal behaviour at parturition in outdoor conditions differs only moderately between single-bearing ewes selected for their calm or nervous temperament. Anim. Prod. Sci. 2010, 50, 675–682. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Type | Derived Features | Unit | Peer-Based Features | Unit | Temporal Features | Unit |
|---|---|---|---|---|---|---|
| Mean speed (MeanSp) | m/s | MeanSp.Mean | % | MeanSp.1 h/24 h | % | |
| Minimum speed (MinSp) | m/s | MinSp.Mean1 | - | MinSp.1 h/24 h | % | |
| GNSS | Maximum speed (MaxSp)2 | - | FNP2 | - | FNP2 | - |
| Mean distance to peers (MDP) | m | MDP.Mean | % | MDP.1 h/24 h | % | |
| Closest peer (CP) | m | CP.Mean3 | - | CP.1 h/24 h | % | |
| Minimum convex polygon (MCP) | % | MCP.Mean | % | MCP.1 h/24 h | % | |
| Time spent grazing (Grazing) | % | Grazing.Mean | % | Grazing.1 h/24 h | % | |
| Time spent lying (Lying) | % | Lying.Mean | % | Lying.1 h/24 h | % | |
| Accelerometer | Time spent standing (Standing) | % | Standing.Mean4 | - | Standing.1 h/24 h | % |
| Time spent walking (Walking) | % | Walking.Mean | % | Walking.1 h/24 h | % | |
| Time spent active5 | - | FNP5 | - | FNP5 | - | |
| Posture changes (PC) | Count | PC.Mean | % | PC.1 h/24 h | % | |
| Average air temperature (AirTemp) | °C/h | NA | NA | NA | NA | |
| Weather data | Hourly rainfall (Rainfall) | mm/h | NA | NA | NA | NA |
| Average wind speed (WindSp) | kph | NA | NA | NA | NA | |
| Average solar radiation (SolarRad) | w/m2/h | NA | NA | NA | NA |
| Training | Validation | |
|---|---|---|
| Animals at trial initiation | 40 | 39 |
| Animals with one or more failed devices | 5 | 6 |
| Complete datasets at trial conclusion | 35 | 33 |
| Excluded datasets | 27 1 | 22 2 |
| Day and hour of birth identified | 8 | 9 |
| Hour of birth known within a maximum 2 h window | 0 | 2 |
| TOTAL | 8 | 11 |
| Features | Lamb | Non-Lamb | ||||
|---|---|---|---|---|---|---|
| Mean | Min | Max | Mean | Min | Max | |
| MDP.Mean (%) | 51.3 | −3.8 | 118.9 | 4.1 | −28.6 | 191.5 |
| CP (m) | 8.0 | 0.6 | 26.1 | 1.5 | 0 | 11.5 |
| MDP (m) | 66.5 | 37.6 | 114.4 | 35.0 | 9.5 | 87.5 |
| PC (count) | 26.2 | 6 | 48 | 9.7 | 0 | 38 |
| Animal | Hour of First Alert | False Positives (Prior to Actual Lambing) | First Alert within ±1 h (X) or ±3 h (X+) | Early False Positives with Later Accurate Alert ±3 h | Failed (No Alerts ±3 h) |
|---|---|---|---|---|---|
| 1 | −67 | 1 | X | ||
| 2 | −21 | 6 | X | ||
| 3 | 0 | 0 | X | ||
| 4 | −1 | 0 | X | ||
| 5 | −43 | 1 | X | ||
| 6 | −114 (4.8 days) | 28 | X | ||
| 7 | −118 (4.9 days) | 3 | X | ||
| 8 | −169 (7.0 days) | 18 | X | ||
| 9 | −1 | 0 | X | ||
| 10 | −56 | 6 | X | ||
| 11 | −68 | 1 | X | ||
| TOTAL | 64 | 3 (+0) | 7 | 1 |
| Animal | Hour of First Alert | False Positives (Prior to Actual Lambing) | First Alert within ±1 h (X) or ±3 h (X+) | Early False Positives with Later Accurate Alert ±3 h | Failed (No Alerts ±3 h) |
|---|---|---|---|---|---|
| 1 | +2 | 0 | X+ | ||
| 2 | −20 | 3 | X | ||
| 3 | +1 | 0 | X | ||
| 4 | 0 | 0 | X | ||
| 5 | 0 | 0 | X | ||
| 6 | −110 (4.6 days) | 12 | X | ||
| 7 | +9 | 0 | X | ||
| 8 | −141 (5.9 days) | 6 | X | ||
| 9 | 0 | 0 | X | ||
| 10 | −16 | 1 | X | ||
| 11 | +3 | 0 | X+ | ||
| TOTAL | 22 | 4 (+2) | 3 | 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fogarty, E.S.; Swain, D.L.; Cronin, G.M.; Moraes, L.E.; Bailey, D.W.; Trotter, M. Developing a Simulated Online Model That Integrates GNSS, Accelerometer and Weather Data to Detect Parturition Events in Grazing Sheep: A Machine Learning Approach. Animals 2021, 11, 303. https://doi.org/10.3390/ani11020303
Fogarty ES, Swain DL, Cronin GM, Moraes LE, Bailey DW, Trotter M. Developing a Simulated Online Model That Integrates GNSS, Accelerometer and Weather Data to Detect Parturition Events in Grazing Sheep: A Machine Learning Approach. Animals. 2021; 11(2):303. https://doi.org/10.3390/ani11020303
Chicago/Turabian StyleFogarty, Eloise S., David L. Swain, Greg M. Cronin, Luis E. Moraes, Derek W. Bailey, and Mark Trotter. 2021. "Developing a Simulated Online Model That Integrates GNSS, Accelerometer and Weather Data to Detect Parturition Events in Grazing Sheep: A Machine Learning Approach" Animals 11, no. 2: 303. https://doi.org/10.3390/ani11020303
APA StyleFogarty, E. S., Swain, D. L., Cronin, G. M., Moraes, L. E., Bailey, D. W., & Trotter, M. (2021). Developing a Simulated Online Model That Integrates GNSS, Accelerometer and Weather Data to Detect Parturition Events in Grazing Sheep: A Machine Learning Approach. Animals, 11(2), 303. https://doi.org/10.3390/ani11020303