This section details the performance evaluation methods that are commonly applied for jamming soft robots and a summary of the results obtained in a range of studies. Grippers comprise a majority of the literature and, thus, grasp tests form a significant component of the discussion that follows.
Most studies physically test jamming robots to evaluate performance. The three primary physical evaluations are:
Researchers often isolate and vary one of eight parameters to ascertain the effect on a metric:
4.1. Grasp Testing
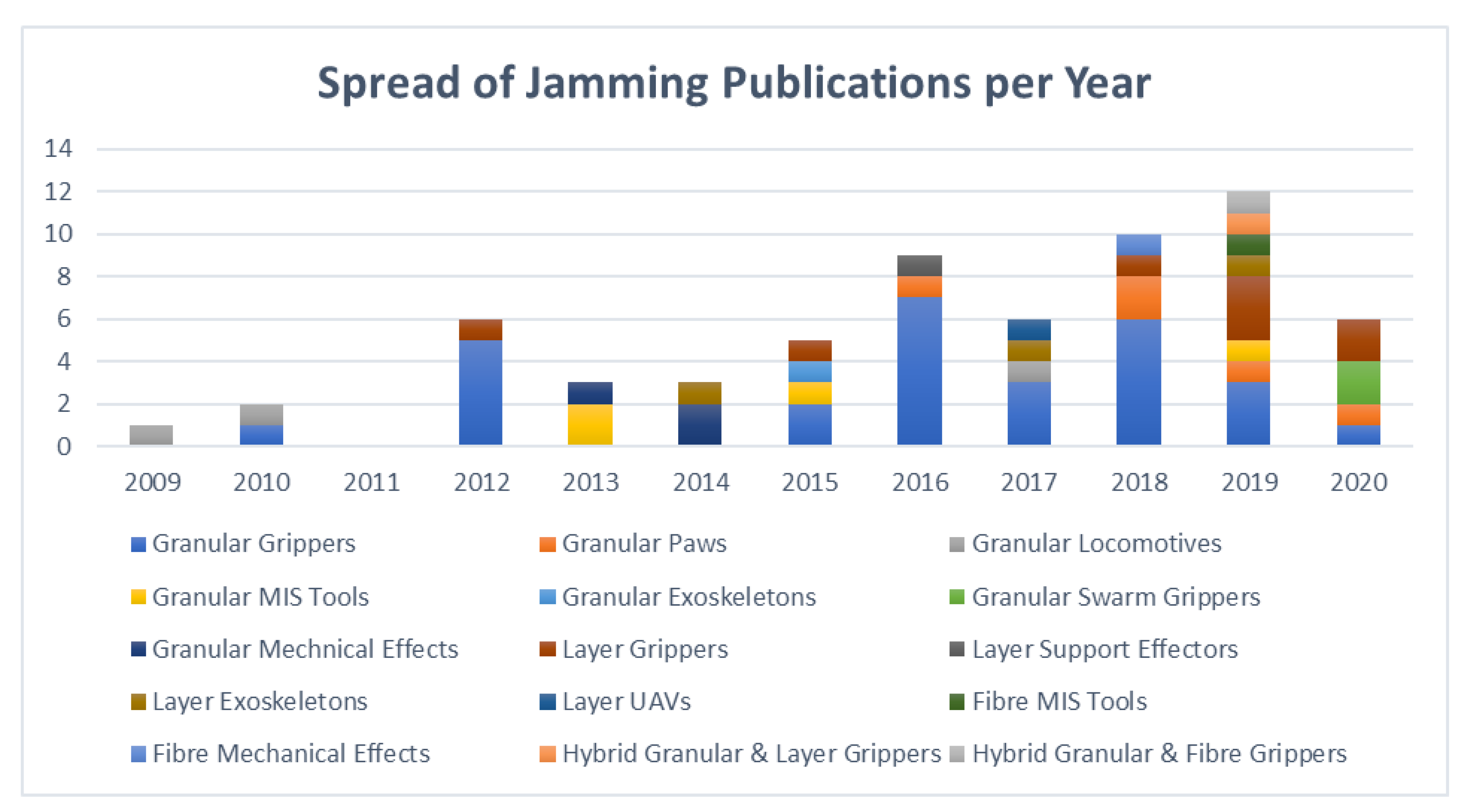
A significant portion of jamming robot studies have used grippers to grasp various objects, which are listed in
Table 13.
Most studies used simple shapes such as spheres, cubes or cylinders, of diverse sizes and materials (from elastomers to metals). Researchers chose the remaining grasped objects based on the objective for their gripper. Raw eggs or sea shells were chosen for demonstrating a fragile object manipulation, coins or foam ear plugs for overcoming standard soft gripper limitations, and various household or hardware items to demonstrate universality. Grippers rarely grasp objects in cluttered environments [
18,
33], multiple objects at once [
11], or near-human-sized objects [
14].
Early work ascertained the key mechanisms for jamming gripper object grasping, finding that granular jamming bag grippers deform around objects and then jam to grasp objects via one of three main grasping mechanisms [
7]:
Geometric constraints from interlocking between gripper and object surfaces;
Static friction from normal stresses at contact;
Additional suction effect, if the gripper membrane can create a seal .
The authors note that jamming grippers are unlikely to reliably have interlocking or seal grasps; the main mechanism is static friction.
Table 14 lists the spread of granular jamming grasping mechanisms on objects.
These mechanisms were rarely exploited for specific goals. Kapadia et al. [
10] coated a target sphere with water; this strengthened the seal and doubled the holding force for their latex balloon membrane. Amend et al. [
11] chose target objects with surface textures too coarse to permit seals. Licht et al. [
17] created custom target objects that only allowed for specifically desired grasping mechanisms.
Jamming pressure is the most commonly modified metric across all tests (likely due to most researchers using pneumatic actuation, which allows for simple pressure variation). Numerous studies [
7,
10,
21,
22,
25,
31] showed the holding force, or maximum held weight, increasing alongside actuation pressure, from 0 to 450 kPa, across diverse grain, membrane and actuation compositions. Kapadia et al. [
10] found that the holding force was independent of ambient pressure across two orders of magnitude, and tests at various ambient pressures showed the holding force was more sensitive to increases in actuation pressure between 30 and 85 kPa than 85 and 450 kPa. Amend et al.’s 2016 [
14] large hydraulic cylinder quadrupled the holding force compared to pneumatic actuation. Amend et al.’s 2012 [
11] positive pressure resets of grain packings increased the holding force on larger objects but decreased it on smaller objects. They reasoned that the greater flowability increased contact angle on large objects but displaced grains to the side of small objects. Kapadia et al. [
10] created fluidized grain beds within their two gripper geometries, which lead to greater holding forces vs. non-fluidized for 23 out of 34 test sets, across nine distinct objects and four activation forces. They deliberated that the fluidization caused further expansion and increased contact areas on objects. These collective results show that the holding force on target objects can be varied via modifying jamming pressure or surrounding ambient pressure for fluidic actuation methods.
Grain size, material properties and morphology all affect inter-grain interaction during jamming, and two researchers [
13,
14] measured how such variations would affect the holding or activation forces. Amend et al.’s 2016 [
14] 35–60 mesh grains generated higher holding forces than 12–20 and 60–100 mesh. Valenzuela et al.’s [
13] 1.2 mm Styrofoam sphere grains obtained greater grasp success percentages on five out of six distinct objects compared against 2.5 mm, but required higher activation forces in 60% of cases. The 2.5 mm grains were incapable of grasping a Styrofoam sphere. Their crushed coffee grains successfully grasped three of six objects, and crushed coffee grasped one, but with a smaller activation force. Styrofoam balls always generated smaller activation forces than coffee grains. It is evident that modifications to these parameters have an effect on the holding or activation force of a jamming gripper.
While no studies modified membrane sizes or materials during grasping tests, a few modified the geometry of their grippers to measure the effect on holding or activation forces. Kapadia et al. [
10] used a nubbed bag that enabled holding forces up to 1000 times greater than their simple bag for certain sized and oriented objects, due to increased contact area. However, nubbed grippers were worse on some of the objects/orientations considered. Li et al. [
25] designed three pressure pack finger gripper variants, two with granular jamming and one without. The granular jamming pair approximately doubled the holding force vs. the non-jamming variant on an object when grasped from the same bending angle. However, at equal air pressures, the non-jamming variant outperformed the jamming pair, and the jamming variant with the most grains had the lowest holding force. They inferred that the increased air pressure, from less grains, enabled a larger contact angle and caused increased holding forces. These combined studies suggest that complex geometrical modifications of gripper membranes can lead to increases in holding force.
The effect on holding force of the relative sizes of bag grippers and objects, and the given contact angles, has been investigated by a number of studies. Amend et al. 2016 [
14] stated that there is a linear relationship between holding force and object envelopment for their ellipsoidal grippers, and that the grip efficiency has a strong dependence on the relative sizes between the target object and the gripper. Brown et al.’s [
7] gripper’s holding force increased alongside contact angle, and they found that a 45
contact angle was critical; however, Kapadia et al. [
10] observed that holding force generally did not increase alongside contact angle. Amend et al. 2012 [
11] found that grasping success rate sharply decreased as a hemisphere object’s diameter went beyond approximately 65% to 75% of their grippers’ diameter. Amend et al. 2016 [
14] disclosed that holding force is maximized when object diameter is approximately 50% of a gripper’s diameter, and gripping reliability is maximized when object diameter is within
and
. These results are not rigorously supported by empirical results, and are partially contradictory, however, there is obvious merit in further investigation, especially with non-spherical objects.
The fill level (volume of granular material within a membrane) is both easily modifiable and an important design factor. Minimizing volume required without losing holding force translates into a lower weight requirement for a jamming robot. Several studies tested their bag grippers at various fill levels. Li et al. 2019 [
30] showed that the activation force consistently increased alongside total injected grain volume. Fujita et al. 2018A [
27] increased coffee fill level four times and each increase resulted in an increase in activation and holding forces on a vertical standing cylinder, as well as reducing variability in grip strength. Licht et al. 2018 [
28] used three fill levels of glass beads. Holding force increased alongside fill level for disk and vertical standing cylinder objects, but not for a horizontally standing cylinder. Activation pressure generally increased similarly. Fujita et al. [
24] used 50% and 80% fill levels. The 50% fill gripper achieved higher holding forces on a 10 mm ball, horizontally standing pipe, and cone objects, and lower for 8 mm ball, cube, and horizontally standing cylinder objects. These combined results suggest that there is a trade-off between decreasing activation force versus increasing holding force for certain objects, while other objects have decreased holding forces with increased fill levels. The differences in fill level increase vs. holding force for horizontally standing cylinders are likely due to the significant design differences between grippers for the two studies. Further investigation of fill level vs. holding or activation force is warranted.
A specific research interest has been the ratio between holding and activation forces. Kapadia et al. [
10] showed that the holding force was generally independent of the activation force between 10 and 25 N for both balloon grippers and their non-fluidized nubbed gripper. They reasoned that the three grippers were at maximum deformation over objects before 10 N. Licht et al. 2016 [
17] found maximum holding force and maximum activation force correlated for activation forces from 0 to 4.5 N. They required up to 10-fold fewer activation forces to achieve holding forces between 5 and 10 N compared to Kapadia et al. [
10] due to use of fluid in place of air. Licht et al. 2018 [
28] provided quantitative evidence that the primary determinant for the holding force to activation force ratio for interstitial fluid jamming is the combined volume of grains and fluid.
4.2. Stiffness Testing
As with grasping tests, actuation pressure was the most modified parameter during bending stiffness tests. All pertinent studies showed that stiffness increased alongside jamming actuation pressure for granular, layer and hybrid jamming. This was across load vs. displacement [
8,
15,
16,
26,
37,
38,
40,
42,
44,
45,
46,
47,
56,
57,
65], bending angle [
6,
21,
25,
31,
38], applied moment [
15,
16,
21,
26,
38,
44,
57] and rotational stiffness tests [
21,
25,
30,
31]. Studies commonly positioned beam, cylindrical, and finger actuators as cantilever beams [
8,
9,
15,
26,
32,
38,
46,
47,
58]. Al et al. [
26] found that decreases in air pressure at lower vacuum pressures caused greater stiffness than at higher pressures. Jiang et al. 2019 [
31] used a differential pressure jamming finger to pressurize two distinct chambers: one with grains and pressure
, and one with air and pressure
where
. They measured the rotational stiffness for a range of
and five differential pressures, whereby a differential pressure
. As
and
increased the rotational stiffness increased for all constant
, and each
caused greater stiffness than any lower
. Setting
=
caused rapid stiffness increases. Li et al. 2019 [
30] compared the rotational stiffness when injecting grains, water or air to the same range of motion. Grain injection achieved 1.5- and 2-fold stiffness compared to water and air, respectively. The gripper’s range of motion with grain injection increased as injected grain volume increased. Jiang et al. 2014 [
47] found that hysteresis increased alongside jamming actuation pressure for three of five tested membrane materials, and one material had an inverse relationship. Overall, the results suggest that actuation pressure is a key determinant in the bending stiffness of a jamming actuator.
Grain or layer sizes were another commonly modified parameter, and several studies tested how variations would affect the bending stiffness of actuators. Wei et al., Jiang et al. 2012 [
12,
15] used 4, 6 and 8 mm plastic spheres, and Jiang et al. 2012 [
8] also used 1.5, 2 and 4 mm plastic cubes, in load vs. displacement tests across several pressures. Wei et al.’s [
15] 6 mm spheres were the stiffest, followed by 4 and 8 mm. Jiang et al. 2012’s [
12] 4 mm spheres were the stiffest and had the lowest variability, followed by 8 and 6 mm. Wei et al.’s [
15] ball and socket spine render comparisons non-ideal. Jiang et al. 2012’s [
8] 4 mm spheres had the highest hysteresis, followed by a tie. The 2mm cubes were the stiffest and least variable, followed by 1.5 and 4 mm. The 1.5 mm cubes had the highest hysteresis, followed by 2 and 4 mm. Hysteresis generally decreased as grain size increased. A comparison between 4 mm solid rubber cubes in a latex membrane and a 10 mm solid block showed that the rubber block required an approximately 33% greater force to displace. They noted the “force-deflection profile of many of the tests display a plateau effect, where the measured force no longer increases as the system is further deflected” [
8]. This may be caused by shifts causing loss of contact with adjacent grains. Wei et al. [
15] showed force rise alongside displacement up to displacements 4-fold those of Jiang et al.’s 2012 [
8]. Li et al. 2017, 2019 [
21,
30] utilized 2, 3 and 4 mm diameter glass spheres and found rotational stiffness increased with sphere diameter across multiple actuation pressures. Elgeneidy et al. [
40] discerned that stiffness increased with layer sheet density. The granular jamming results suggest that grain size affects the bending stiffness, and the two factors do not always increase (or decrease) alongside each other due to local (or global) maximums.
Due to their having a distinct effect on a variety of factors (such as volume, density, and grain interactions), several papers tested how modifying grain or layer geometry would affect the bending stiffness. Jiang et al.’s 2012 [
8] 1.5, 2 and 4 mm plastic cube packings caused consistently less stiffness variability than 4, 6 and 8 mm plastic spheres. The 4 mm cubes had the best stiffness linearity. Spheres and cubes had similar force ranges. The 4 mm plastic spheres achieved the highest displacement force. Elgeneidy et al.’s [
40] results show that stiffness increased with layer sheet angle. Zubrycki et al. [
56] assessed the LvD for a latex cylinder over two granular and two layer packings: wooden cubes, polystyrene spheres, 64 layers of 90 g paper with three foam layers and 112 layers of 90 g paper. The 112 layers was stiffest by a distinct margin, followed by 64 layers, wooden cubes, and polystyrene beads. The results show that distinct grain or layer geometries can produce different maximum stiffnesses and variability in stiffness linearity, and that layer jamming versus granular jamming with respect to bending stiffness deserves further investigation.
Grain or fibre material is a direct determinant of inter-grain/fibre friction in a packing, and certain researchers quantified how various materials would affect the bending stiffness of an actuator. Jiang et al. 2012 [
8] used 4 mm plastic, solid rubber, hollow rubber and rubber-coated plastic cube packings. Rubber granules were less stiff than plastic, but had lower hysteresis and variability. They discerned that this was due to the decreased probability of shear between individual granules. Four millimetre, rubber-coated plastic cubes had better stiffness than rubber ones, and better linearity and hysteresis than all others. Jiang et al. 2019 [
31] tested corn, calcium chloride and plastic sphere packings within their differential pressure jamming finger. Corn had the highest rotational stiffness, followed by calcium chloride. They hypothesized that the smoothness and shape regularity of the plastic spheres caused a lower friction coefficient, and the calcium chloride’s larger diameter caused a lower packing fraction, leading to lower stiffness than corn. Mizushima et al. [
29] used four grain materials: coffee powder, plastic spheres, rice, and gravel. Rice was stiffest, followed closely by both gravel and plastic spheres, and then coffee powder. Brancadaro et al. [
49] compared six fibre materials: PTFE, PVC, Nylon, Silicone, Waxed Cotton, and Leather. Each had two packing methods: bundle, with an average fill level 0.25–0.37, and comb, with 0.22–0.31, in a cylindrical latex membrane. All variations were stiffer jammed vs. unjammed. Nylon had the highest jammed stiffness, in part due to its inherent increased rigidity. Cotton achieved the highest unjamed vs. jammed stiffness variation. Their maximum stiffness variations of 300–400% align with granular findings from Jiang et al. 2012 [
8]. Comb packings had higher stiffness variations for all except Nylon, and generally increased from 15 to 212% between packing types. This was attributed to a more structured and organized arrangement of the fibers in the CT joint. The stiffness variation of the comb packings increased alongside surface roughness. The combined results show that grain/fibre surface roughness and deformability are key determinants of the bending stiffness of a jamming actuator.
Certain researchers quantified whether increasing membrane thickness, or overall size, would affect the bending stiffness of a jamming actuator. Li et al. 2017, 2019, and Jiang et al. 2019 [
21,
30,
31] tested Silicone rubber membranes of varying thickness for their finger actuators, Li et al. 2017 [
21] 3, 4 and 5 mm, Jiang et al. 2019 [
31] 1.5, 2 and 2.5 mm, Li et al. 2019 [
30] 2, 3 and 4 mm. Increased membrane thickness always decreased rotational stiffness. Li et al. 2019 [
30] showed no significant increase in range of motion as membrane thickness increased. Thompson et al. [
58] tested the LvD of three sizes of sugar filled Silicone rubber beam membranes—large (15 × 15 × 85 mm), medium (15 × 12 × 85 mm) and small (15 × 9 × 85 mm)—and compared them against a solid beam of Silicone rubber. Deflection decreased as chamber size increased, and the solid rubber beam was least stiff. They found evidence suggesting that the relationship between chamber size and deflection is non-linear. Error bars showed that jamming beams were unpredictable compared to the solid beam. At separate points for each jamming beam, a sharp gradient increase occurred, suggesting changes in the jamming structure of the granules as more weight or deflecting force is applied to the beam. These collective results suggest that increasing membrane thickness when using a given material will generally decrease finger-shaped jamming actuator bending stiffness.
Three researchers experimented with how modifying either the internal structure of their membranes would affect the inter-grain interactions and overall bending stiffness of their granular actuators. Jiang et al. 2012 [
8] embedded 4 mm half-spheres into a latex membrane. This increased stiffness linearity and decreased hysteresis vs. the simple latex membrane with 4 mm plastic sphere packings. Neither the stiffness variability nor the peak force were improved. Wei at al.’s [
15] granular jamming ball-and-socket gripper achieved higher rigidity and stiffness between pressures than the non-jamming version. Li et al. 2018’s [
25] two granular jamming grippers achieved vastly greater rotational stiffness than their non-jamming gripper. Their two jamming variants exchanged dominance at certain pressures for both planar and lateral rotational stiffness. Their joint findings provide quantification that minor or extensive modifications to membrane geometry can affect the bending stiffness of a granular actuator.
Much like grain–grain material interactions, the membrane–grain material interactions play a part in the inter-grain interactions of a jamming actuator, and researchers sought to quantify this effect. Jiang et al. 2014 [
47] used Latex, Nitrile, Vinyl, Vitrile, and Polythene cylindrical membranes, each with 4 mm glass sphere packings at approximately 0.61 packing fractions across a range of pressures. The polythene membrane had the highest stiffness and variability. Its high hysteresis was explicated to be due to plastic deformation from membrane–granule and granule–granule interactions. Nitrile and Latex were the next stiffest materials, with similar results for force, hysteresis and variability. Vinyl and Vitrile were the least stiff and had similar variability to Latex and Nitrile. Pairwise Mann–Whitney U-Tests found that the variability between the unjammed actuators was always significantly different. They reasoned that since the peak stiffness of the unjammed state depends primarily on the membrane stiffness, there was a base level difference in the bending stiffness because of the different types of membranes used. Some pairs lost their significant differences in stiffness variability at 10 kPa, which the authors found to imply that there is an interaction effect between the type of membrane and the level of vacuum. An n-way ANOVA test found a significant effect on the stiffness from the pressure, the membrane material and the interaction between the pressure and membrane material. Li et al. 2019 [
30] used three Silicone rubber shore D hardness variants, 0, 5 and 10D, across a range of injected grain volumes. Rotational stiffness decreased as hardness increased. Range of motion increased alongside hardness when the injected grain volume was beyond a threshold. These results show that the membrane material has a significant effect on the bending stiffness of a granular jamming actuator.
Few research has directly compared granular vs. layer jamming; however, two researchers quantified comparative bending stiffness across the jamming types. Wall et al. [
43] compared two granular jamming and two layer jamming PneuFlex finger variants. G1’s coffee grains were in a cylindrical compartment, G2’s in a conical. L1 stacked 10 interleaved polyester sheets in a compartment, L2 reduced the distance between sheets and incorporated an elastic top layer. L2 achieved the highest averaged stiffening factor, followed by L1, G2 and G1. Yang et al. [
44] designed a hybrid layer and granular jamming finger with bioinspiration from human hands. It had a pneumatic actuator, mimicking muscles and tendons, three chambers of layer jamming sheets, functioning as bones, and two granular jamming chambers, acting as joints. Each compartment was independently actuatable. It was tested against two variants: all chambers containing grains, and all chambers containing layers. The solely layer jamming variant was the stiffest, followed closely by the hybrid, and the granular stiffness was approximately half of either. The authors noted that with more controllable pneumatic chambers, their proposed hybrid jamming finger could not only realize variable stiffness capability but also possess bending shape controllability, giving greater versatility compared to pure granular or layer jamming fingers. This suggests that layer jamming may enable greater bending stiffness than granular jamming for the same approximate total allowed volume.
4.3. Strain Testing
Actuation pressure was the most modified parameter in strain testing. Fujita et al. 2018 [
24] showed a coffee-powder-filled latex membrane actuator increasing in compressive hardness alongside actuation pressure. Hauser et al.’s [
60] latex bag, containing rubber cubes, showed its compressive load vs. displacement decrease and Young’s Modulus increase as jamming pressure increased. Their results show that the compressive hardness of a jamming actuator increases alongside jamming pressure.
Jiang et al. 2014 [
47] quantified how the membrane–grain material interactions would affect the compressive and tensile stiffness of their actuators, using multiple membrane materials over multiple actuation pressures. They used Latex, Nitrile, Vinyl, Vitrile, and Polythene cylindrical membranes, each with 4 mm glass sphere packings at approximately 0.61 packing fractions across a range of pressures. They recorded the peak stress, hysteresis, variability (MPa) and E (MPa) were recorded for up to 20% compressive and tensile displacements across 101 kPa (15 PSI-A), 55 kPa (7.5 PSI-A), and 10 kPa (1.5 PSI-A). The compressive peak stress and E always increased with jamming pressure, and hysteresis was persistently different at vacuum vs. atmospheric. Peak tensile stress was greater at 55 kPa than 10 kPa, except for vinyl ,which was constant. Tensile E increased with jamming pressure for all except vinyl and nitrile, which decreased beyond 55 kPa and stagnated beyond 55 kPa, respectively. Polythene always had the highest compressive E and variability, and was significantly superior in all pairings at all pressures, except vinyl at 10 kPa. Vinyl had the largest compressive stiffness range, followed closely by latex. A total of 20% compressive strain caused permament deformation to vitrile and polythene actuators. All actuators had similar compressive hysteresis. Pairwise Mann–Whitney U-Tests for peak compressive stresses showed all pairs were significantly different at 101 kPa, latex, nitrile and vinyl were not significantly different at 55 kPa, and at 10 kPa, all pairs were significantly different. Mann-–Whitney U-tests for compressive stress vs. strain showed that all pairs were significantly different at 101 kPa, and all but vinyl and vitrile at 10 kPa. Membrane-only tensile tests showed that latex, vinyl and vitrile cylinders had linear stress vs. strain with small hysteresis. Nitrile and polythene had high tensile hysteresis; they theorized that polythene’s was from permanent deformation from testing. Polythene had peak tensile stress and E values approximately 10-fold greater than all others. Pairwise Mann–Whitney U-Tests found that all except latex–vinyl and nitrile–vitrile were significantly different. At 101 kPa, all packed actuators except polythene were similar to the empty membranes. The authors noted that without jamming, the tensile strength of the actuator is limited by the membrane, with the unjammed grains having little effect. Polythene had four-fold greater peak tensile stress and E than all other actuators, and underwent further deformation, leading to the highest hysteresis. Nitrile, vinyl and vitrile decreased in E beyond 55 kPa; polythene and latex linearly increased in stiffness. Pairwise Mann–Whitney U-Tests on peak tensile stress showed that all pairs were significantly different at 101 and 10 kPa, except nitrile–vinyl at 101 kPa. Pairwise Mann–Whitney U-Tests on stress vs. strain showed that all pairs were significantly different at 101 and 10 kPa, except latex–nitrile at 101 and 10 kPa, or latex–vinyl and nitrile–vinyl at 10 kPa. Their results show that membrane material can significantly affect the compressive or tensile stiffness of a granular jamming actuator, and that jamming has a strong affect on the stiffness of an actuator.
Athanassiadis et al. [
48] studied the mechanical response of granular packings for a range of convex and non-convex grain shapes. They compression tested 14 distinct geometric shaped grain packings, including eight convex shapes and six non-convex shapes, in cylindrical latex membranes. They tested all packings first at confining pressure
0.08 MPa, and then a range of
. Stress vs. strain curves deduced the Young’s Modulus E under compression, and compressive yield stress
. E and
always correlated, and their ratio was not determined by convex vs. concave packings.
across all packings, and
n generally increased with packing sphericity. E and
increased with confining stress for several orders of magnitude. E was affected by the combination of
and shape. The grain shape was determined
by approximately one order of magnitude and was largely independent of
.
determined
for certain packings. Faceted Platonic solid packings had increased strain, and increased stress for plastic deformation vs. sphere packings. Stress beyond yielding correlated well with sphericity. High packing density did not correlate with rigidity. Compact packings had nearly perfectly linear plastic failure. Packings with sharp points or lengthy protrusions had stress increased in stress beyond yielding. The interpenetrative packing did not result in an increased E from increased
. The authors noted that, at small strains, the stress increased approximately linearly. For larger strains, the stress smoothly transitioned into a plastic failure regime.
Cavallo et al. [
53] compression tested the jammed vs. unjammed compressive stiffness of two silicone rubber membranes filled with equally distributed ground coffee: one with a single chamber and one with three. The single chamber had the greatest compressive stiffness variation. They tested three Silicone hardness variants: shores 10, 30 and 50. The Shore hardness 10 variant had the largest compressive stiffness variation, however, it engendered excessive effort for use and was unstable. It was followed by the 30 and 50 variants. Pepper, salt, sugar, and ground coffee were tested in a single-chambered shore 30 membrane. Salt achieved the highest compressive stiffness variation and the highest standard deviation. Coffee was next highest, followed by pepper with a similar standard deviation to coffee, and sugar with little deviation. A high-resolution microscope was used to quantify the size and shape of the materials, and the better coffee performance in terms of stiffness variation was attributed to its significant surface roughness and irregular shape. Their results show that membrane geometry or material hardness and grain geometry or surface roughness can be determinants of a beam-shaped granular actuator’s compressive strength.







{kind=link}
{kind=link}
{kind=link}
{kind=link}