Mathematical Simulations and Analyses of Proportional Electro-Hydraulic Brakes and Anti-Lock Braking Systems in Motorcycles

Abstract
:1. Introduction
2. Proportional Pressure Control Valve
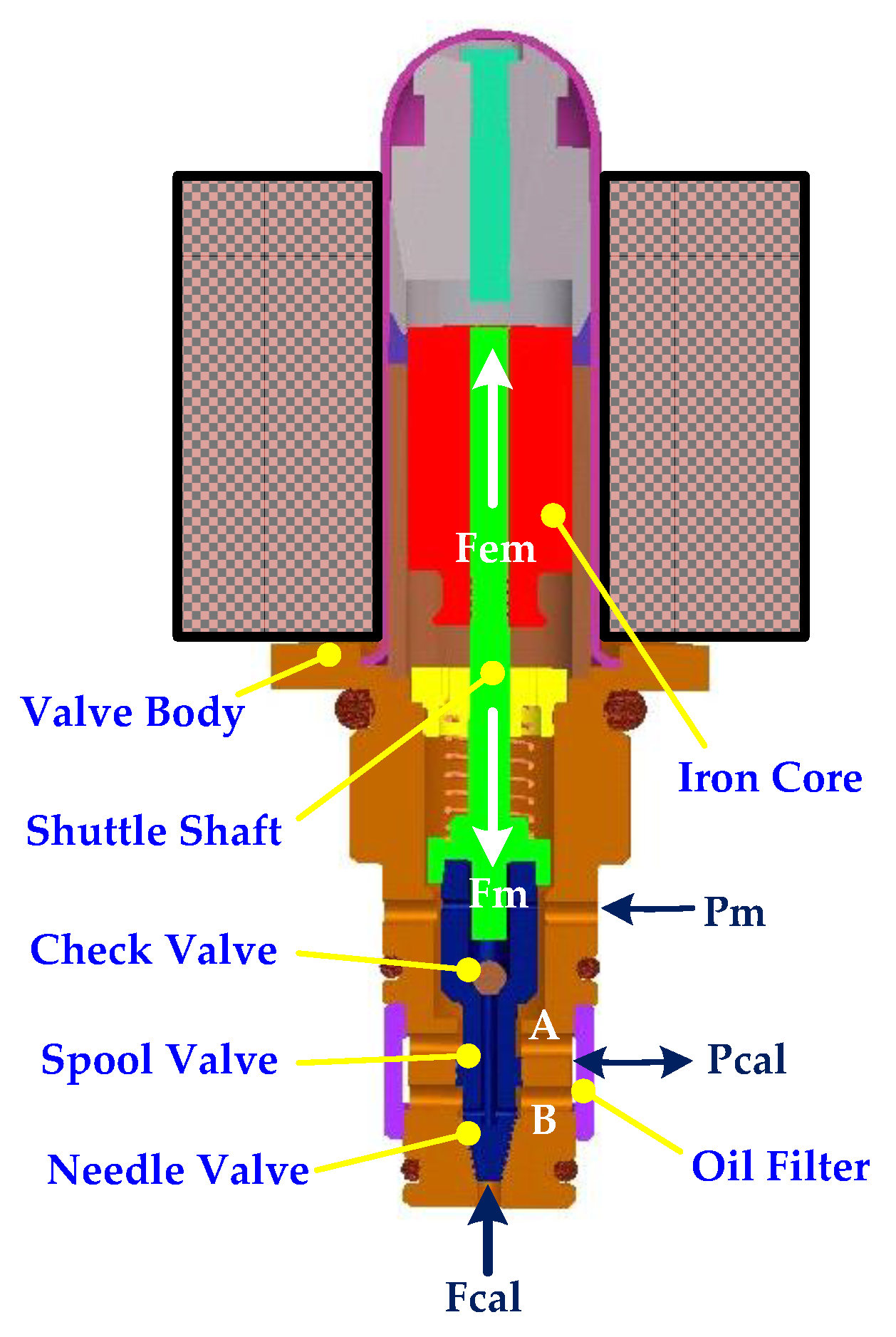
2.1. Proportional Valve Body
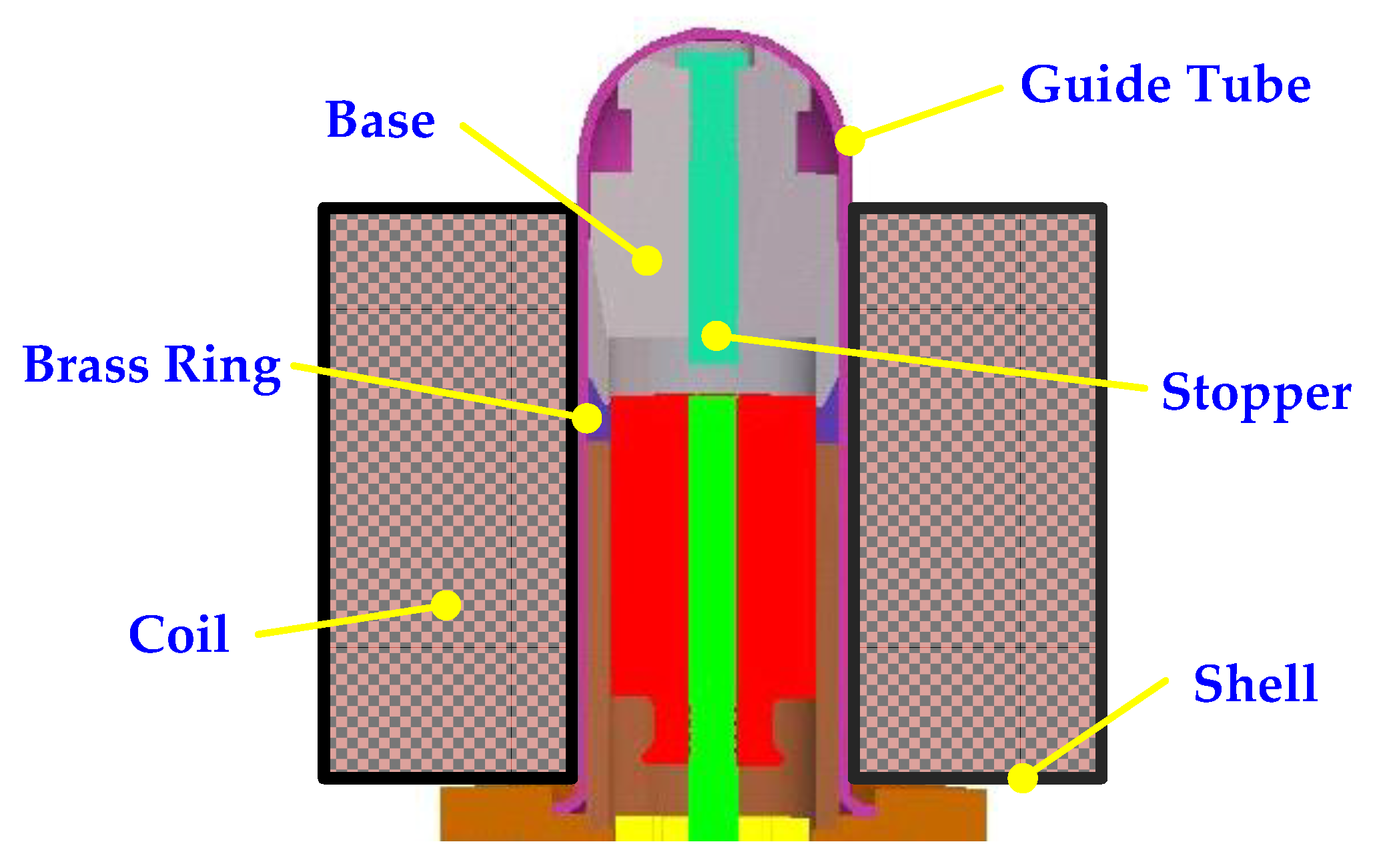
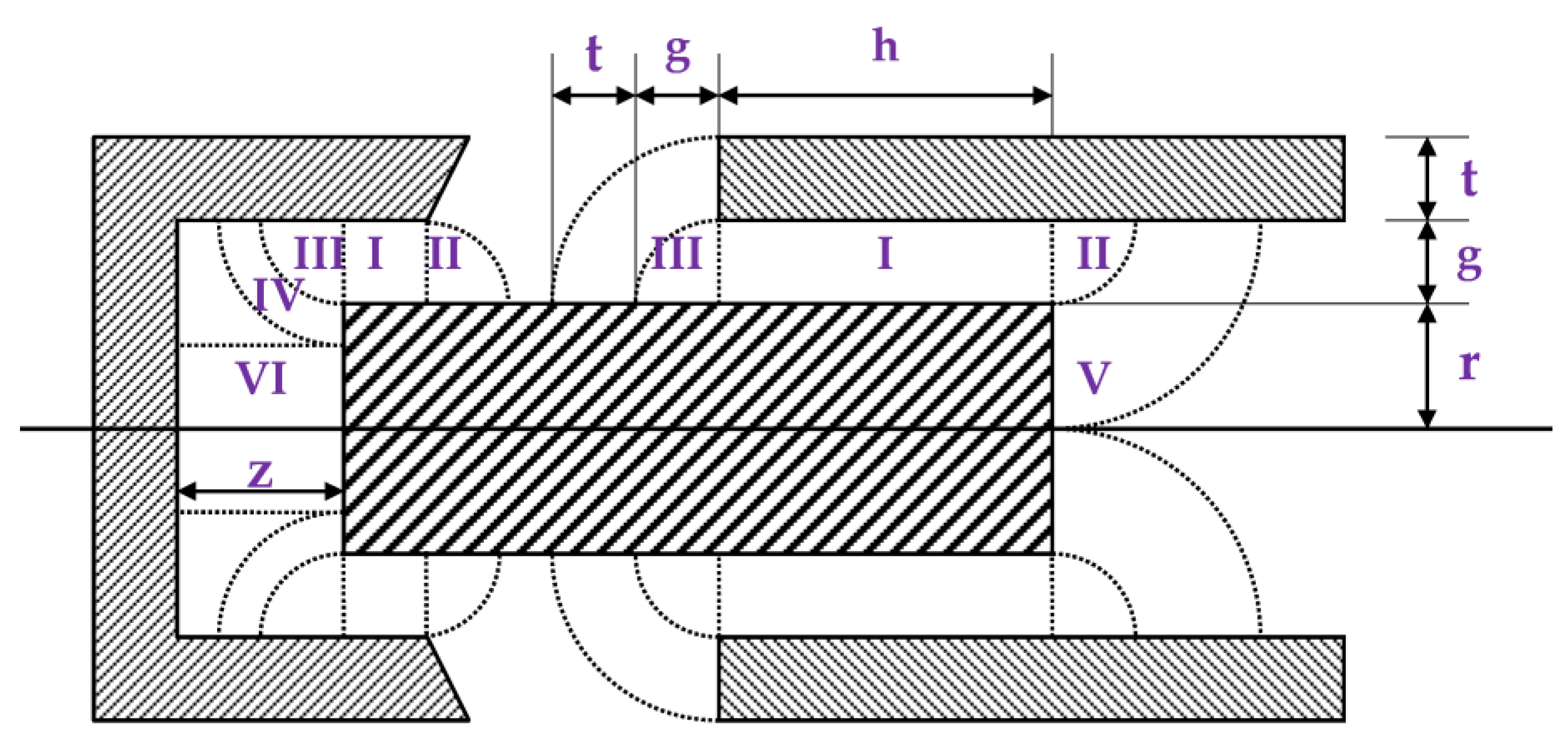
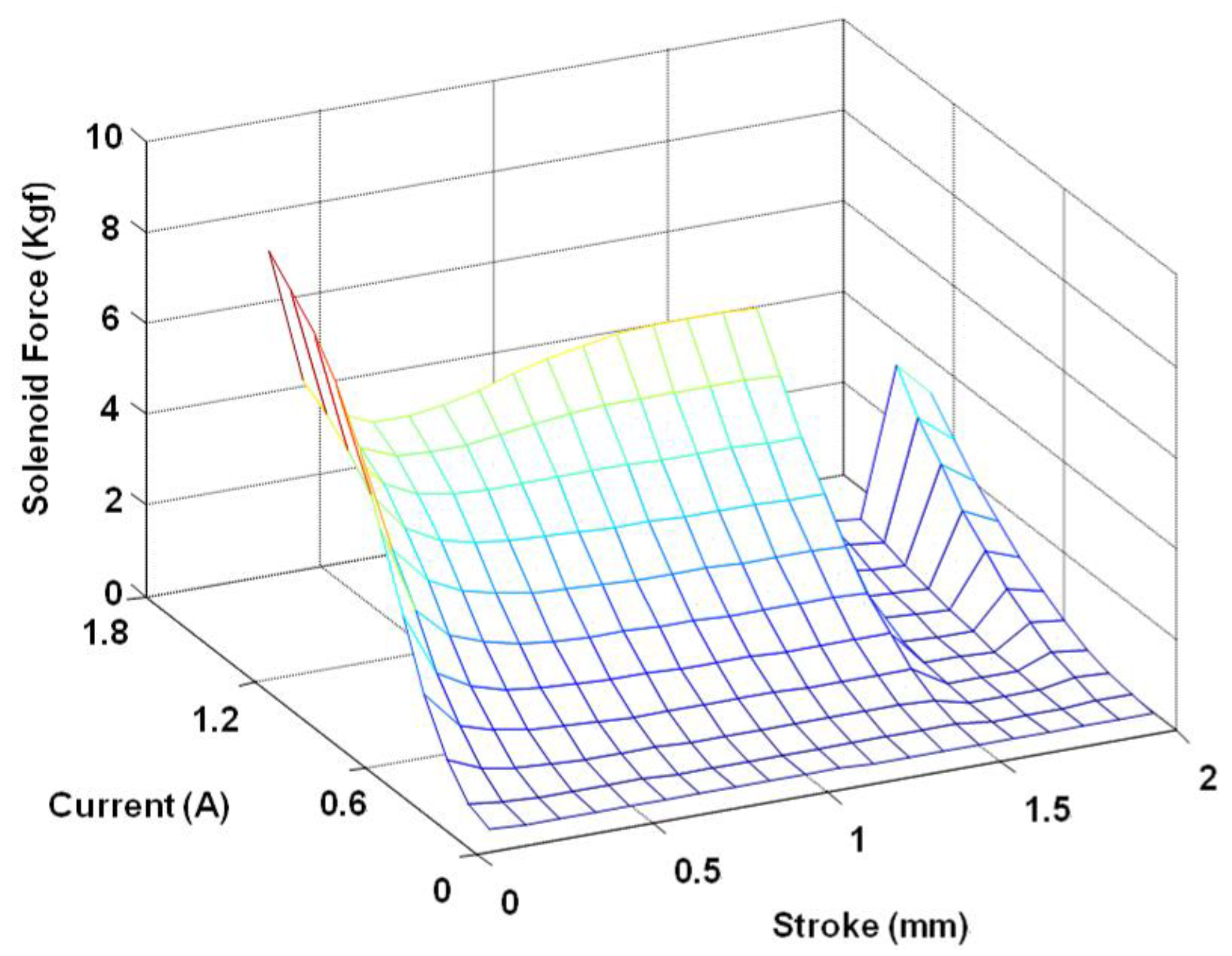
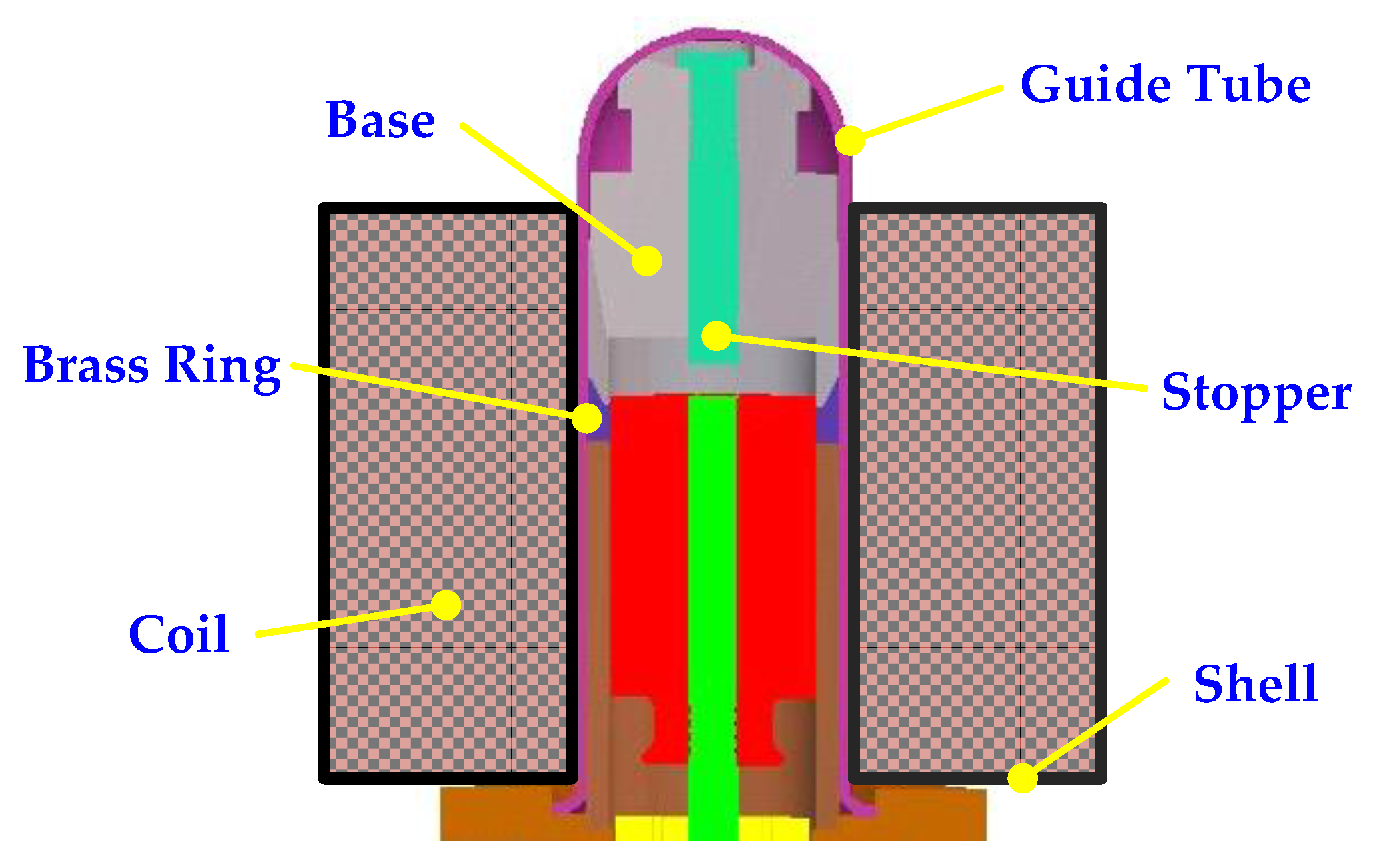
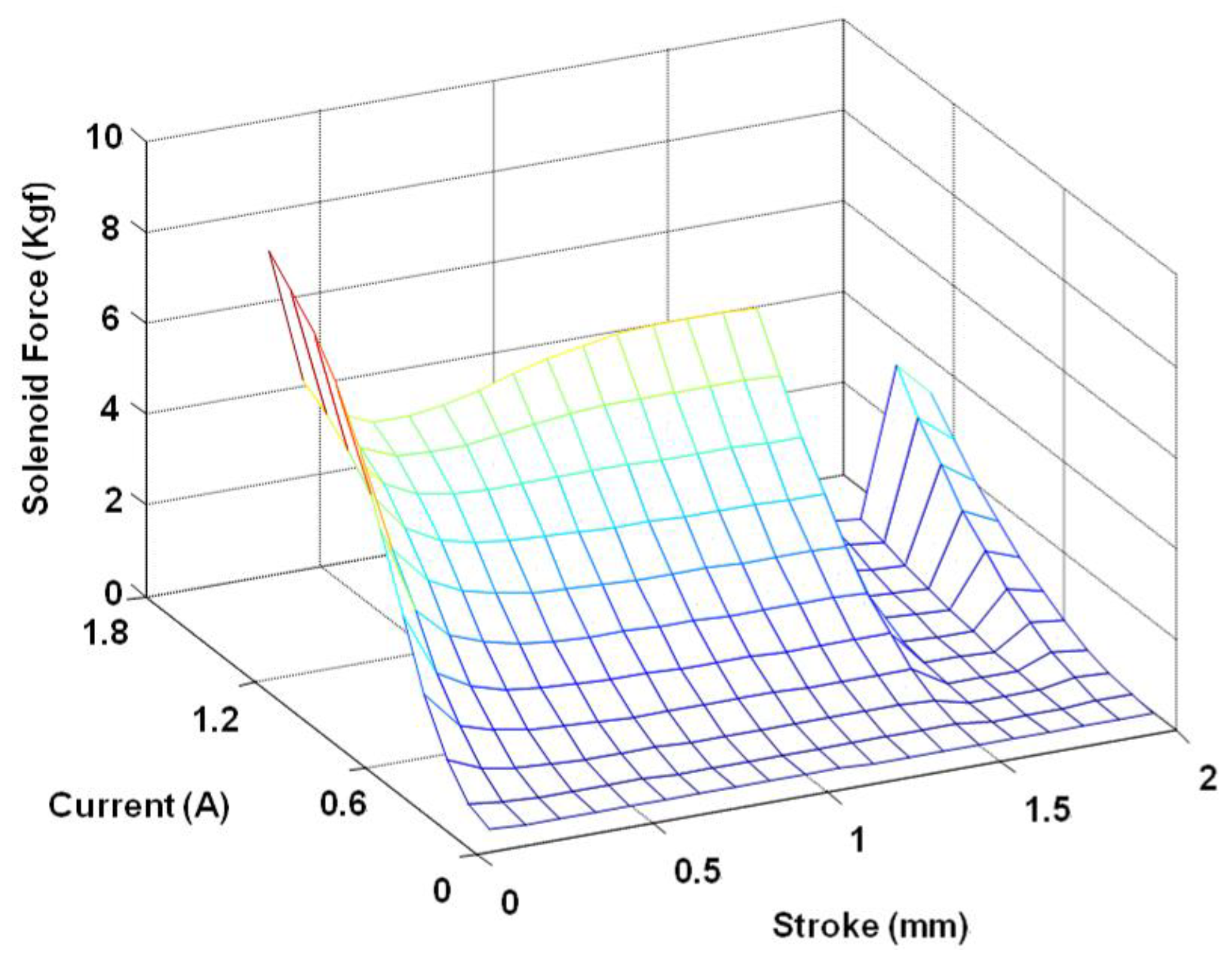
2.2. Proportional Electromagnet
3. Mathematical Model and Controller
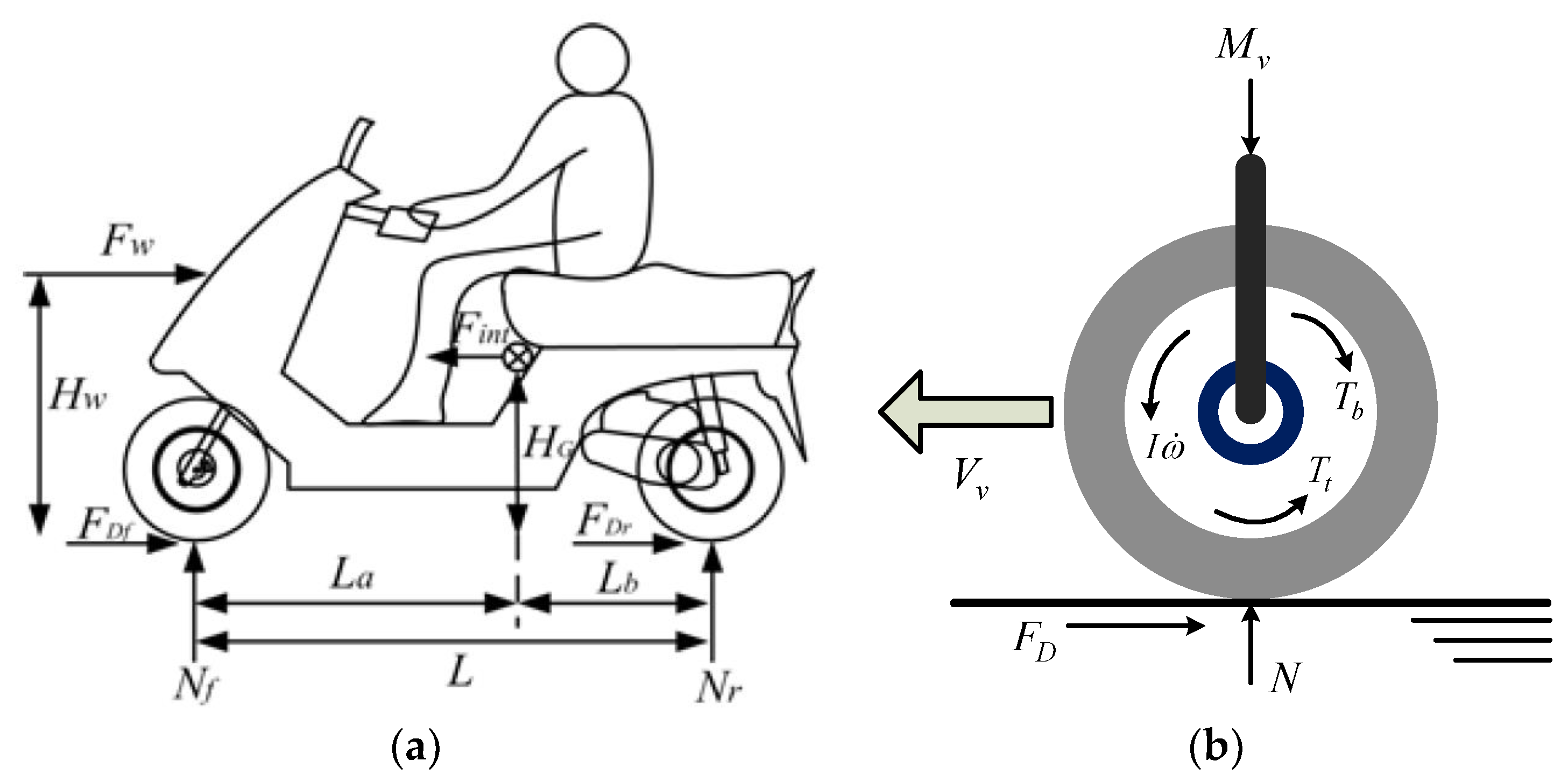
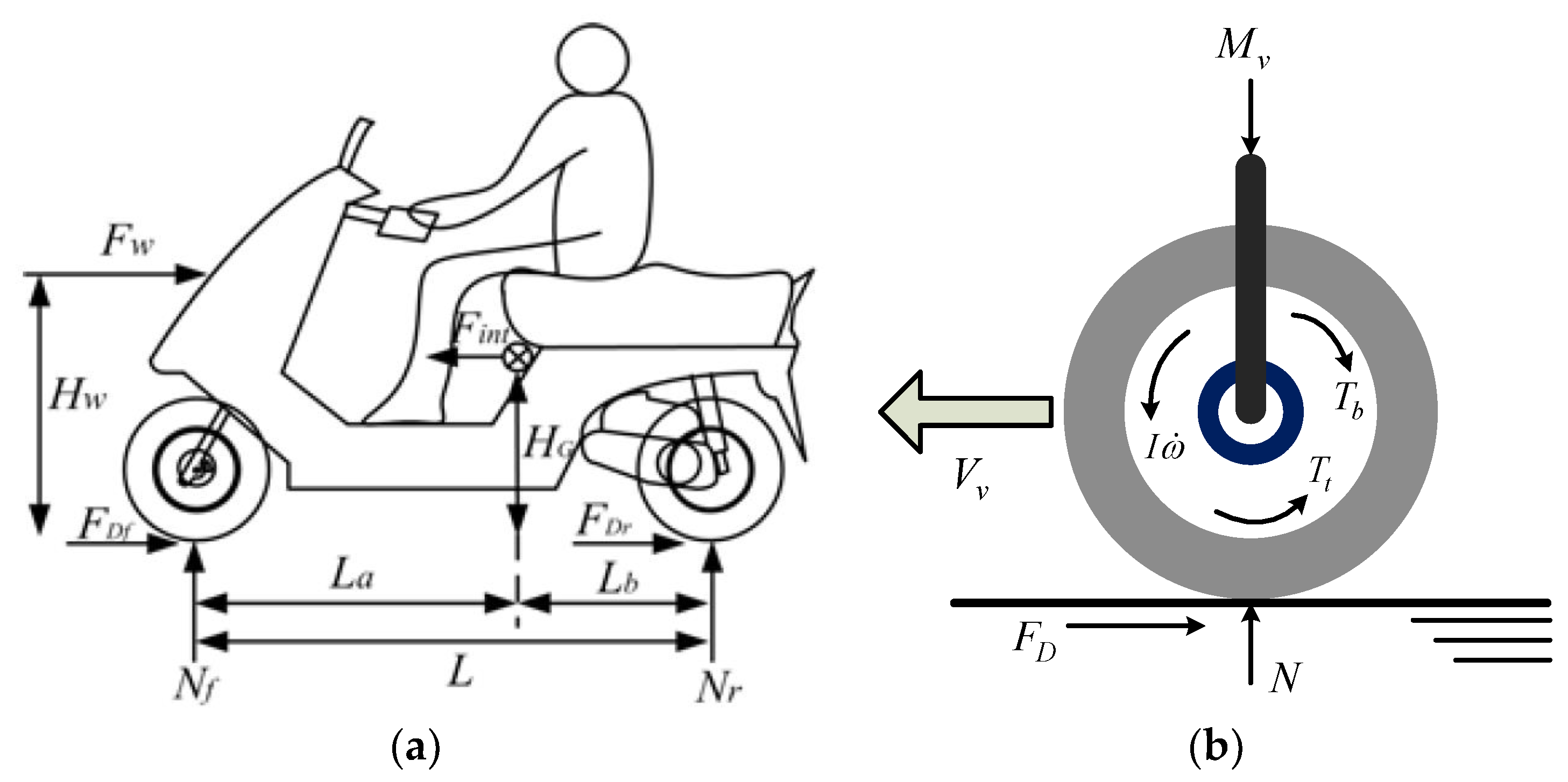
3.1. Mathematical Model of Motorcycle Motion
3.2. Wheel Braking Model
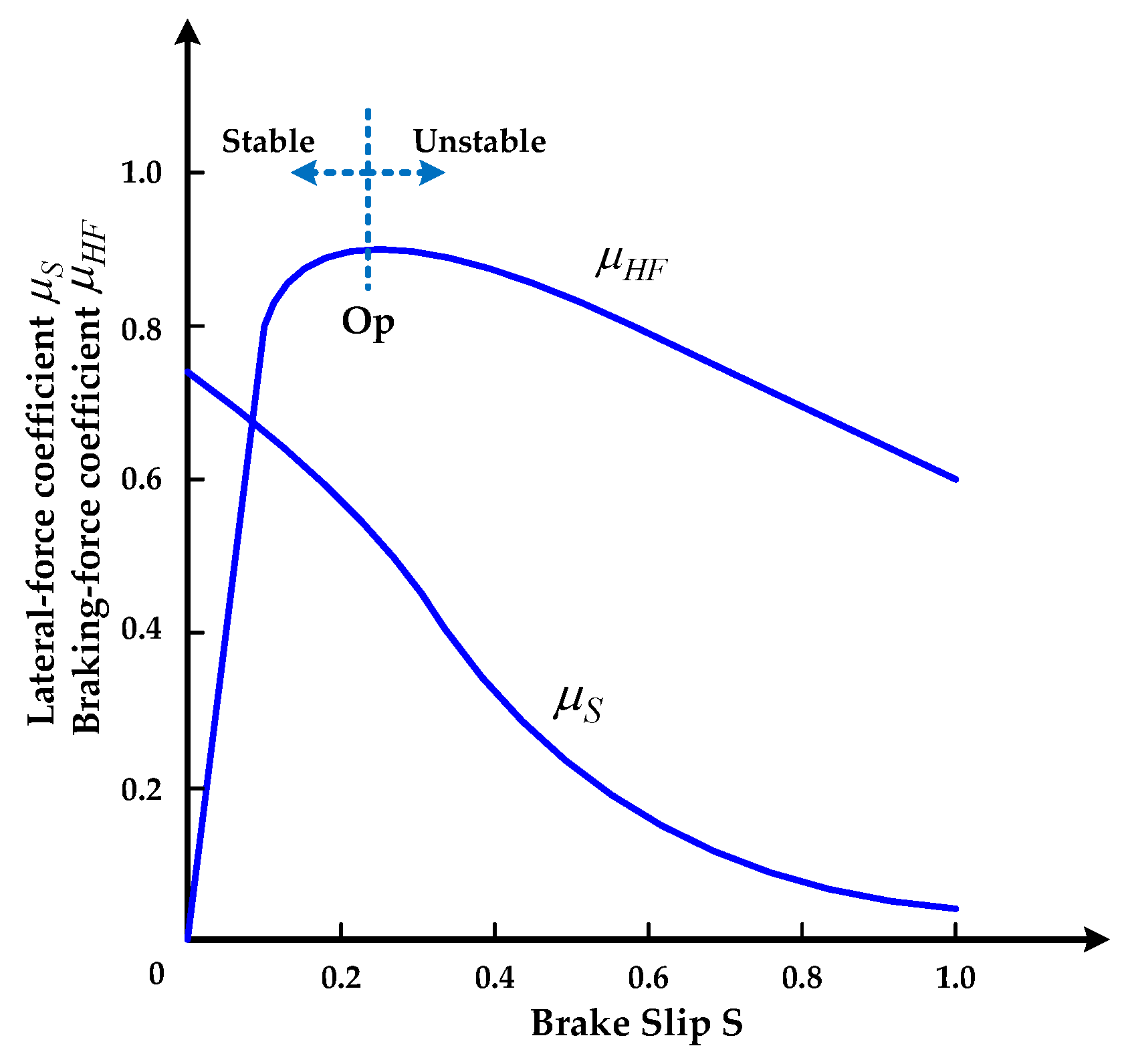
3.3. Tire and Ground Model
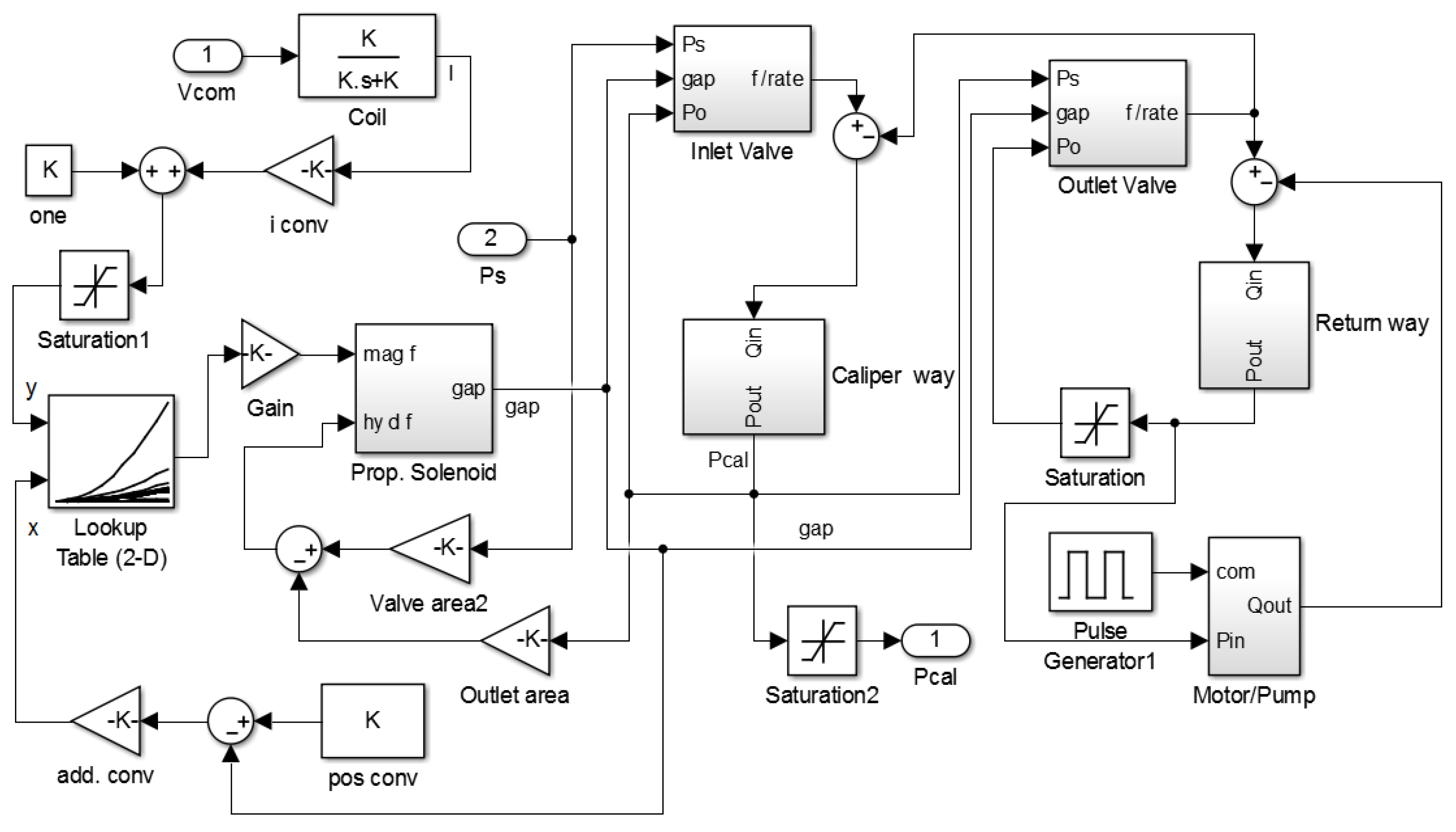
3.4. PEHB Mathematic Model Analysis
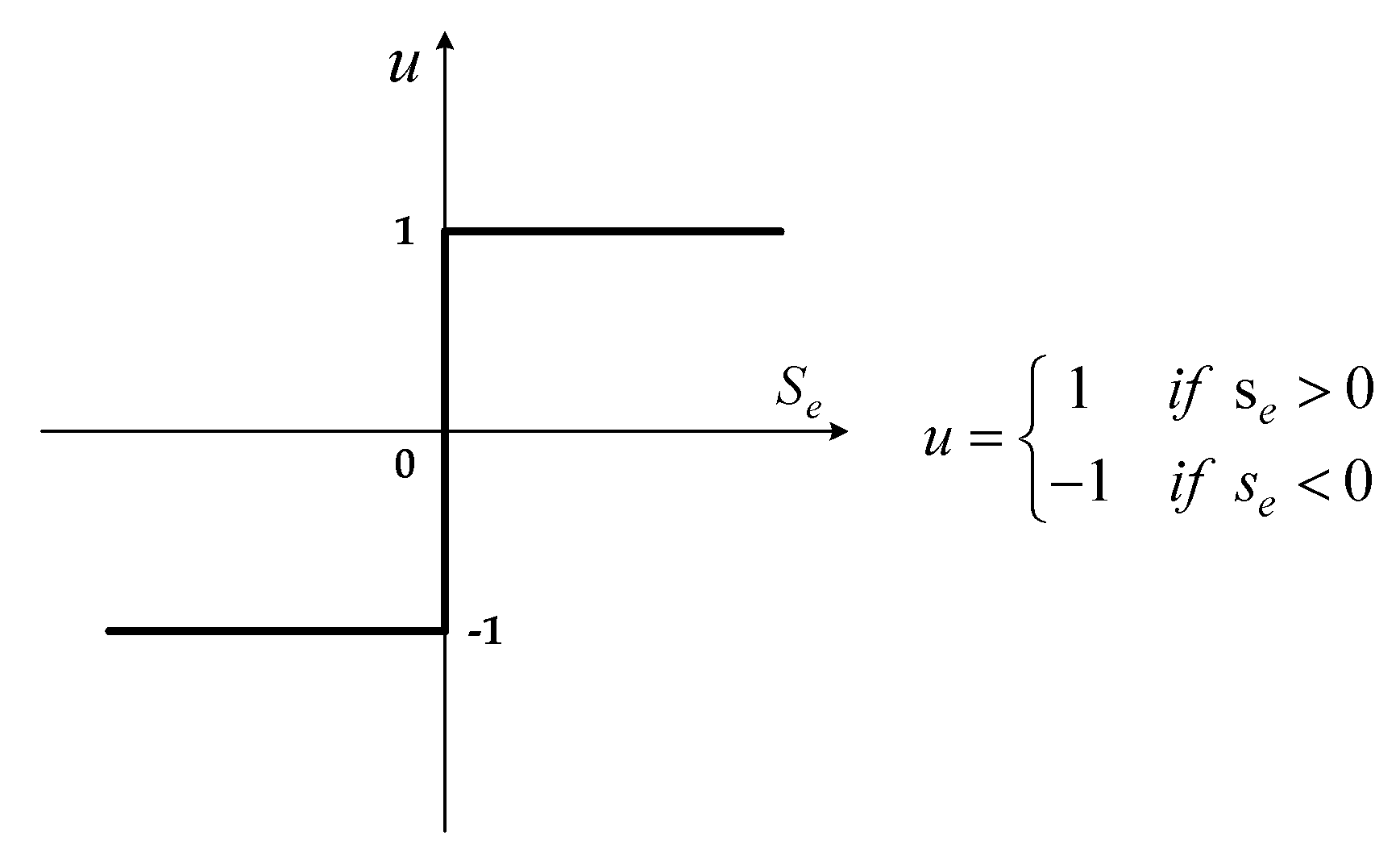
3.5. Traditional Discrete Switch Control
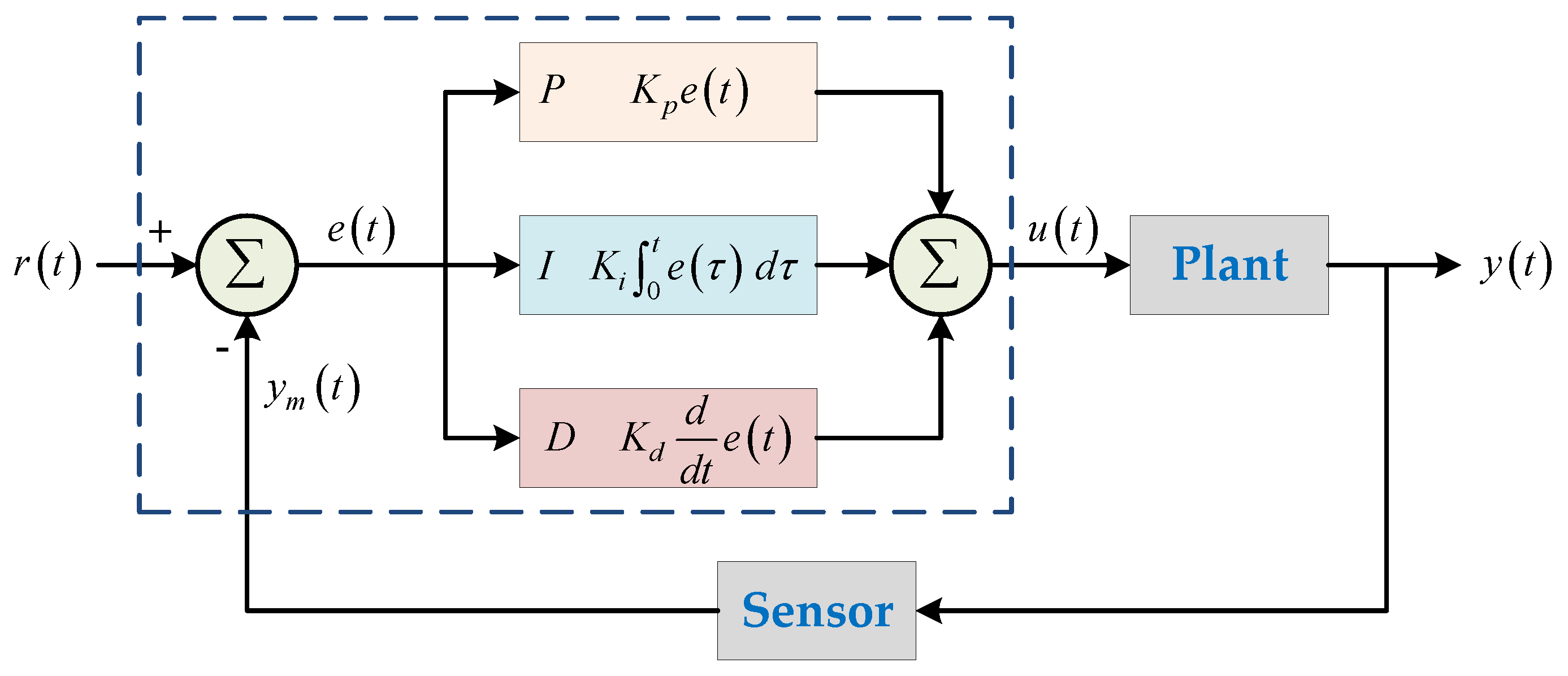
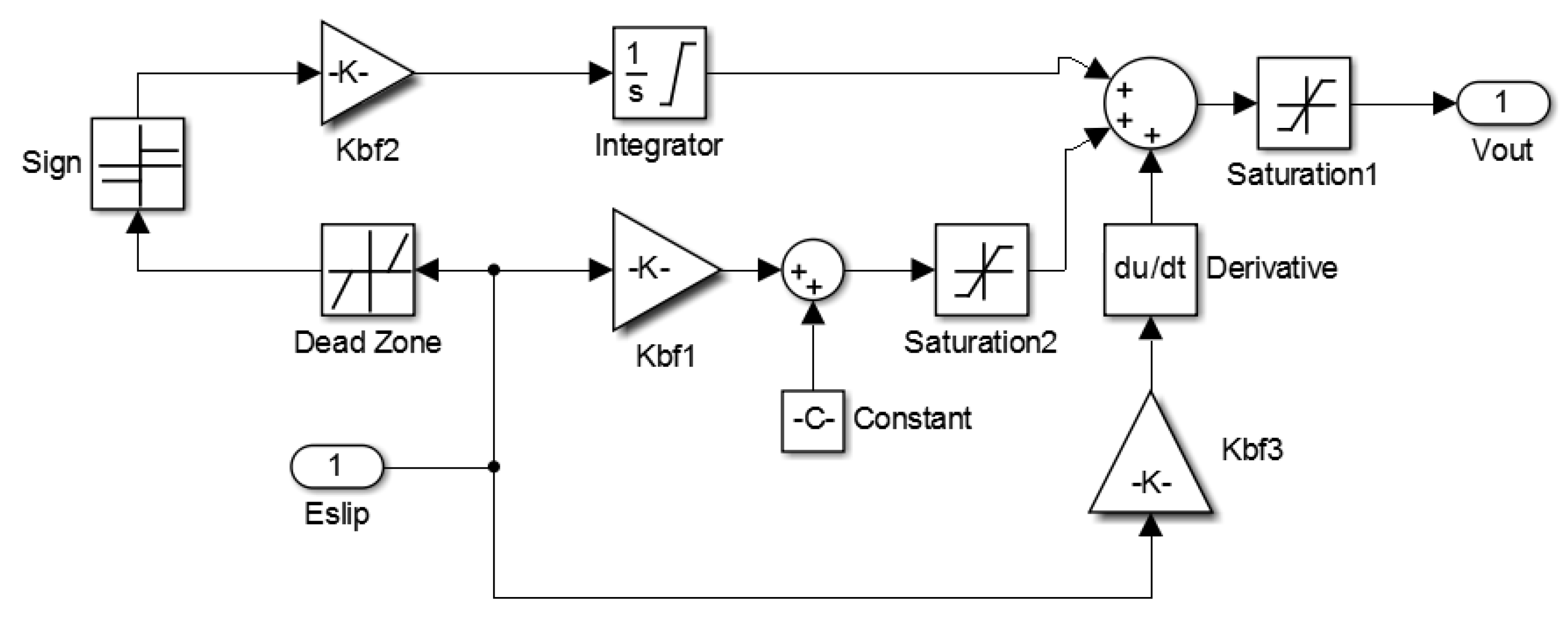
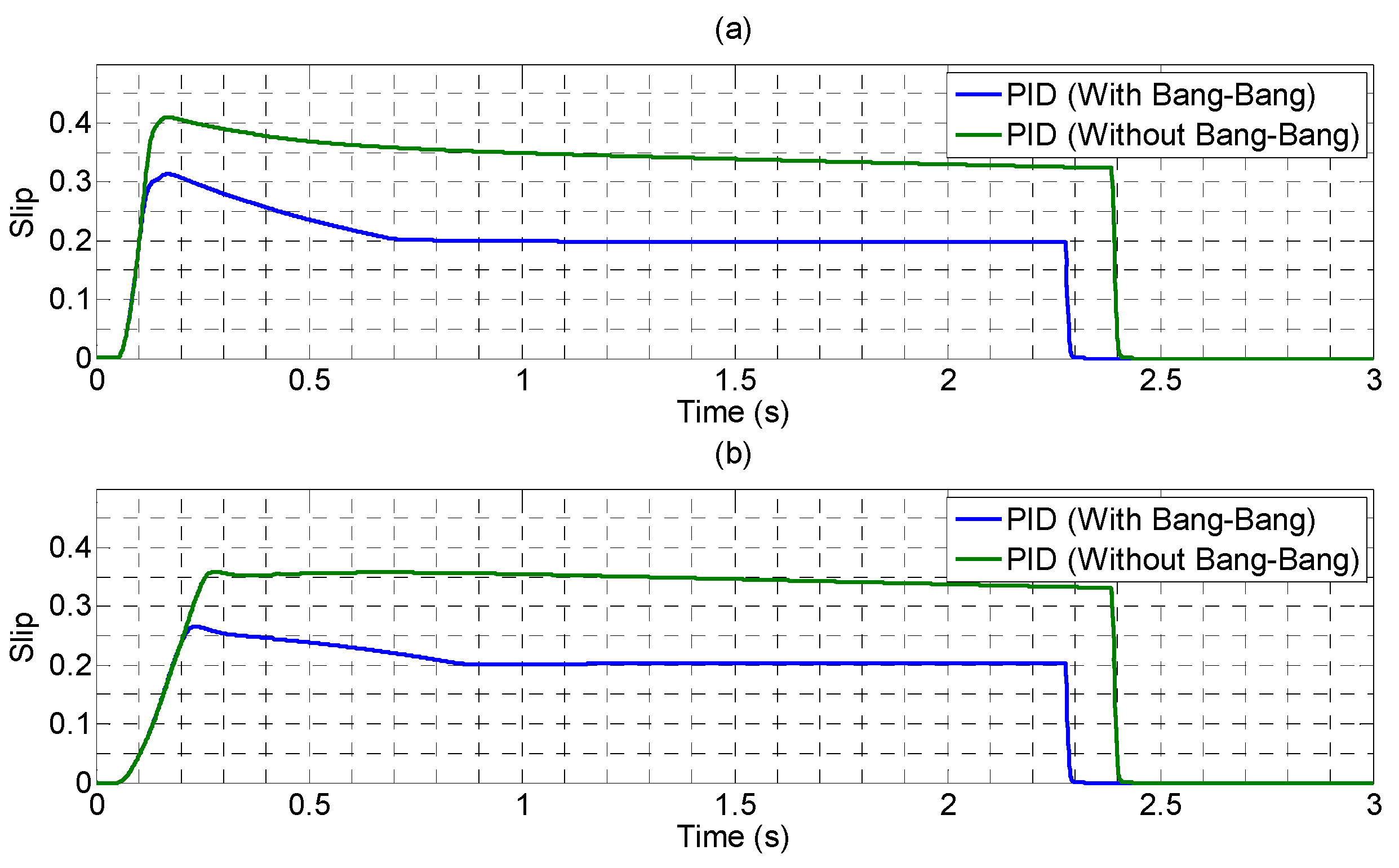
3.6. Proportional–Integral–Derivative Controller
4. Simulation and Results Analysis
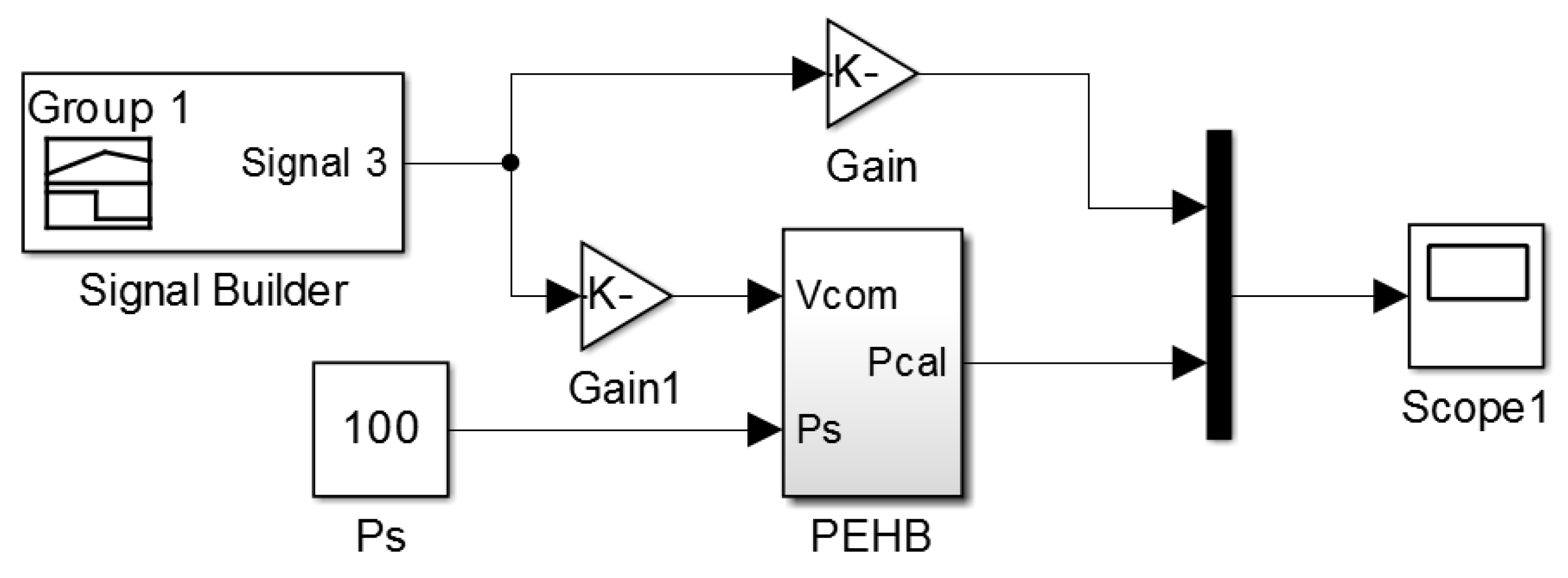
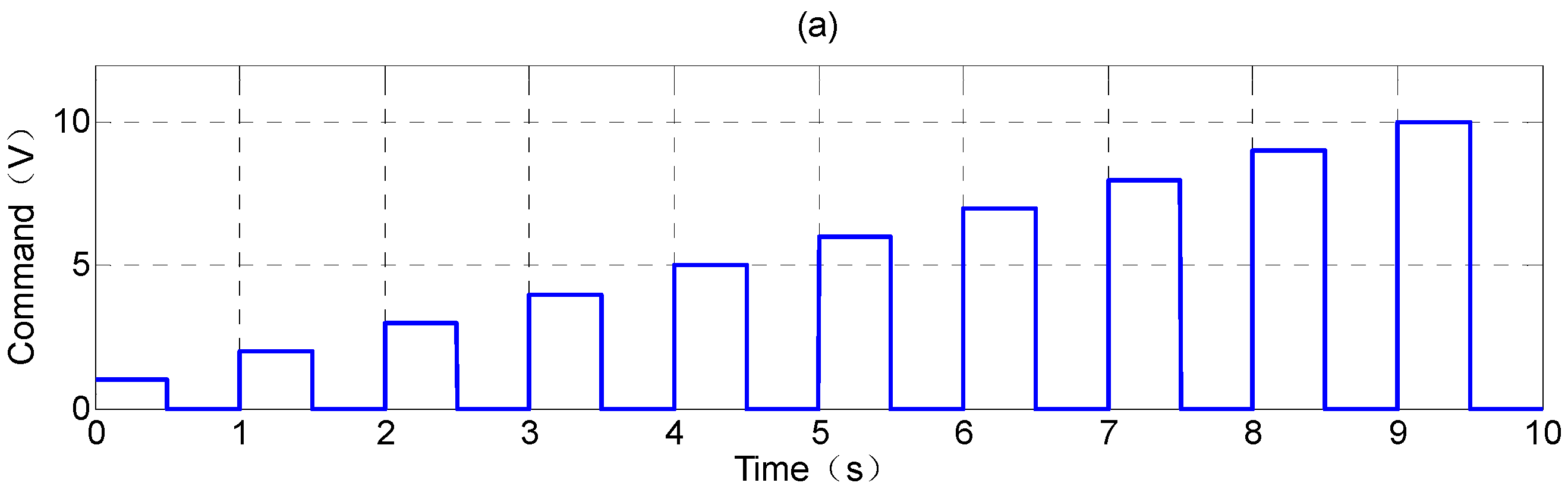
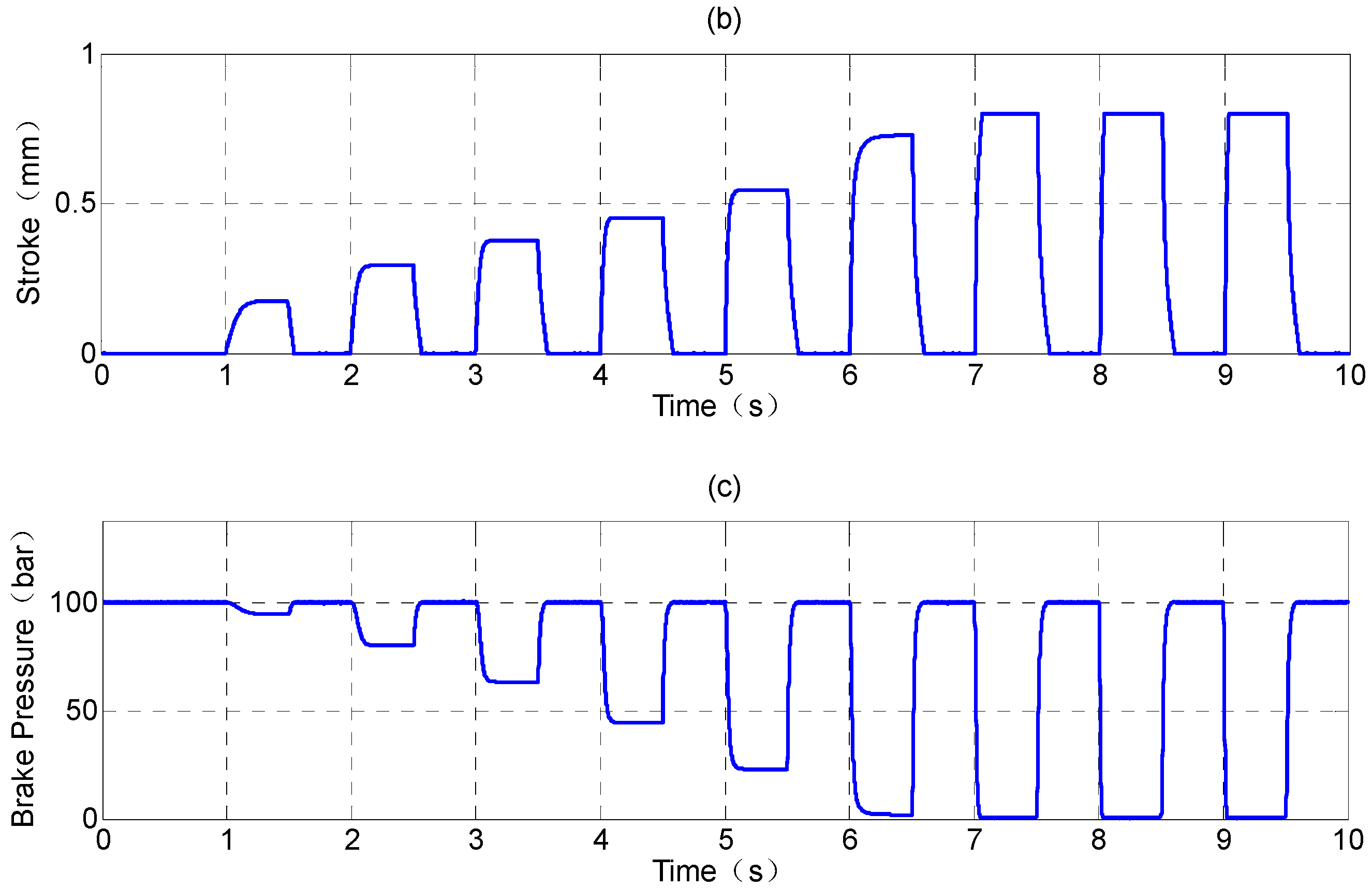
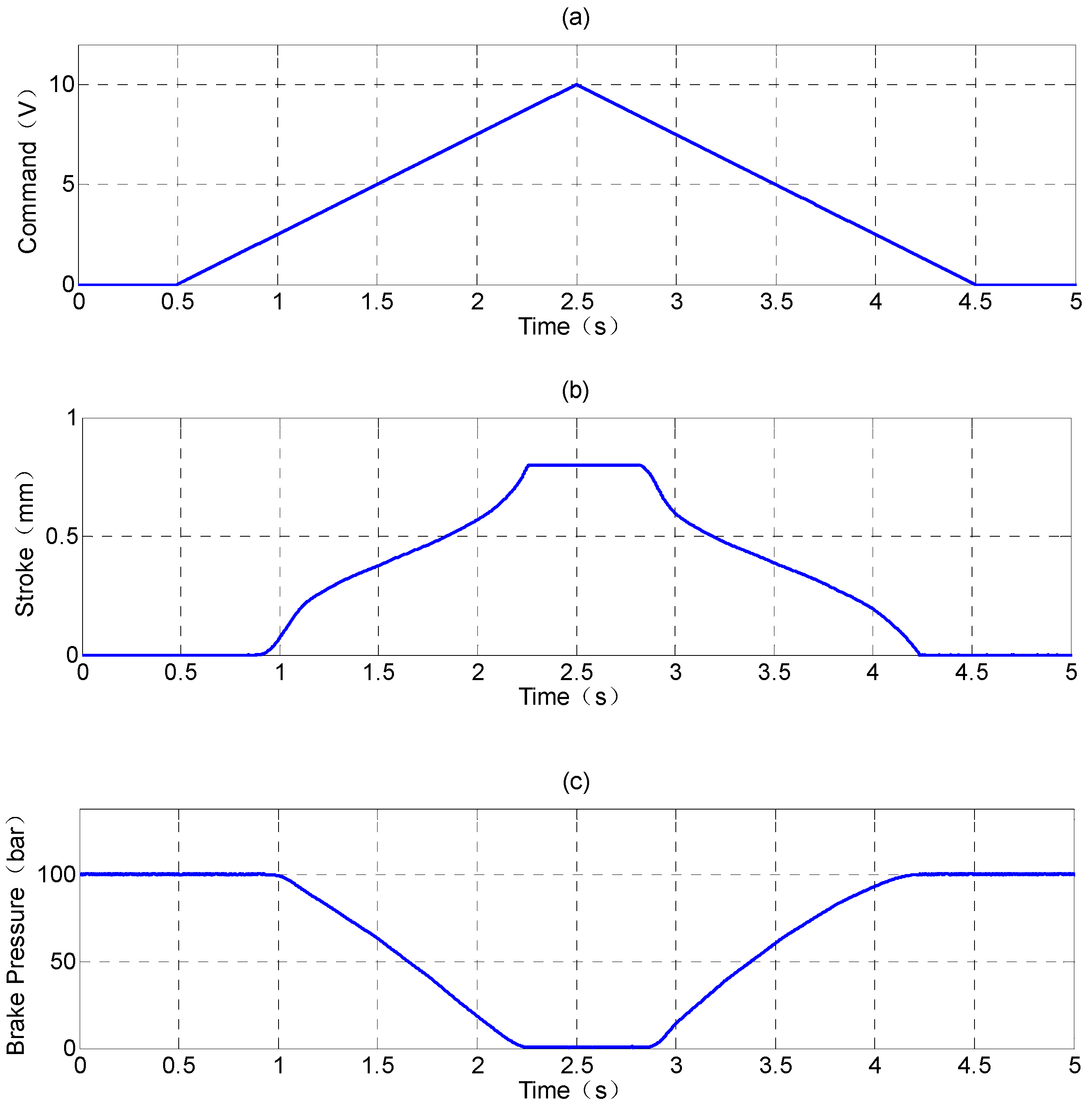
4.1. PEHB System Simulations and Analyses
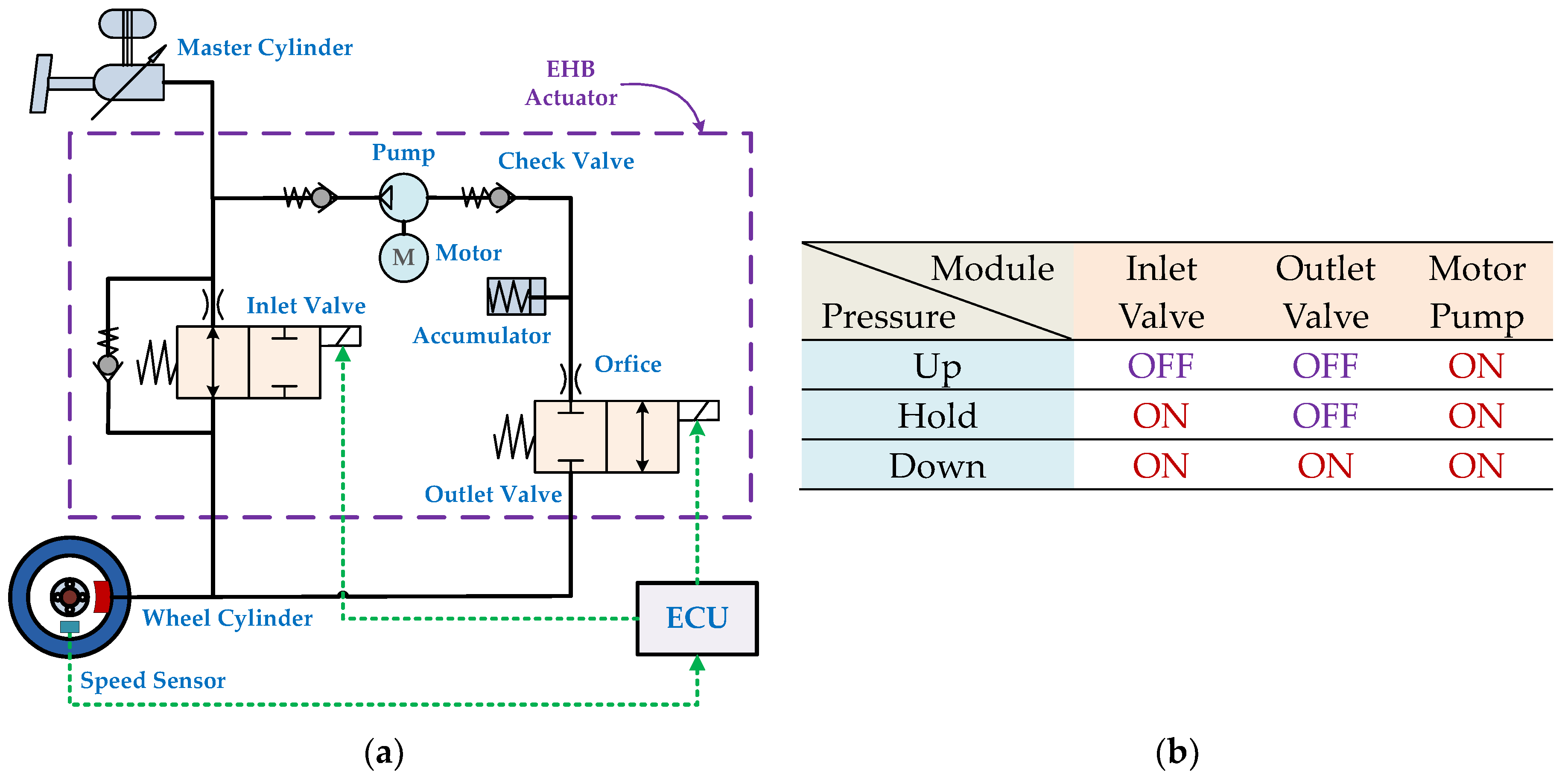
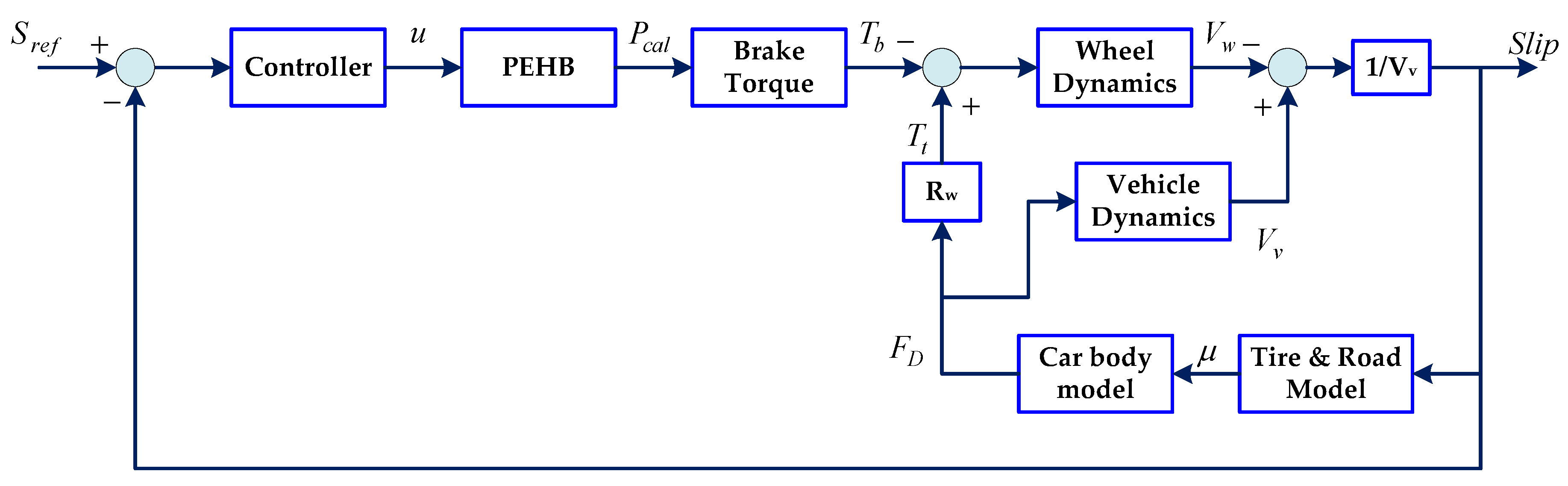
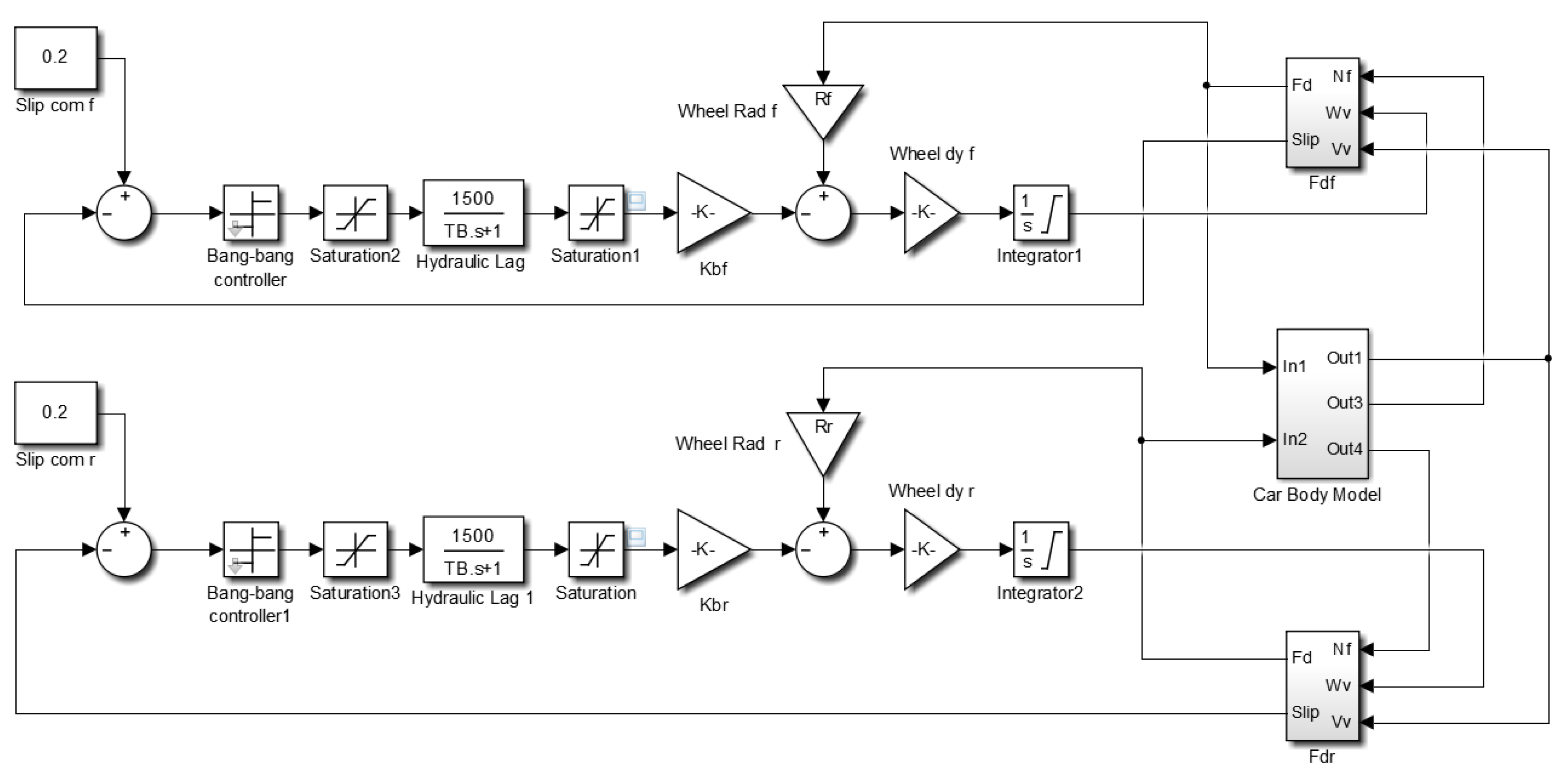
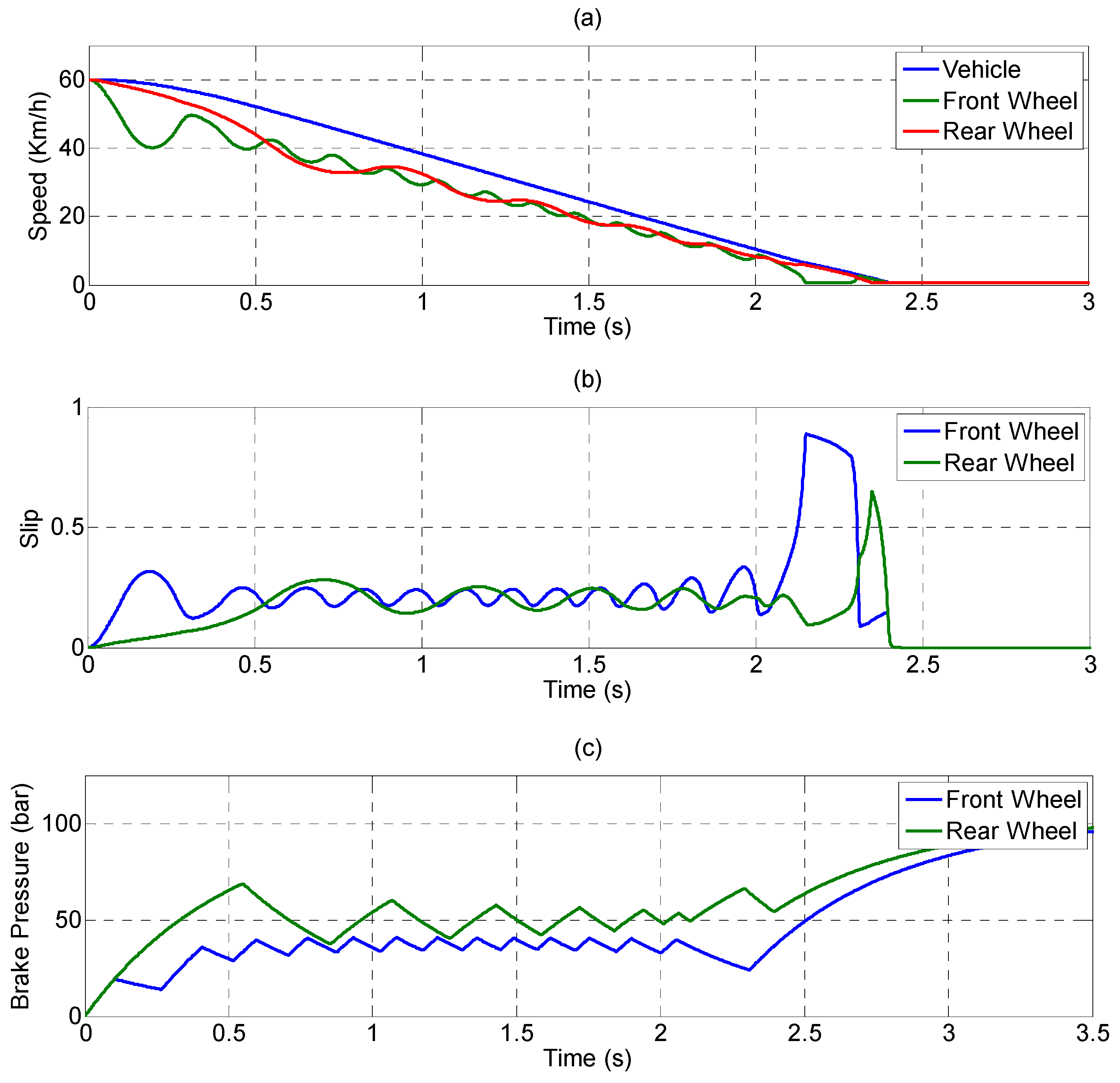
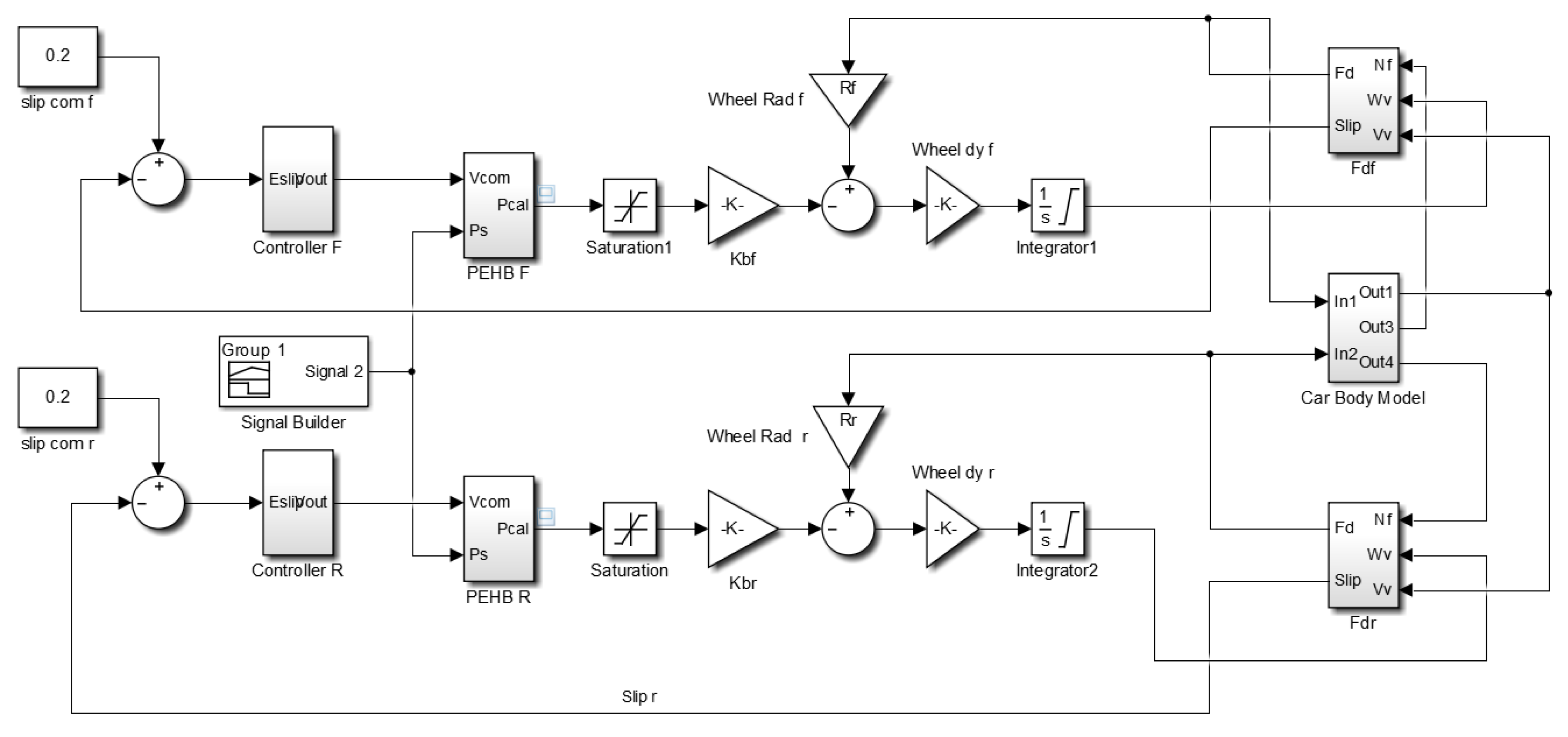
4.2. Motorcycle ABS Simulation Model with an EHB
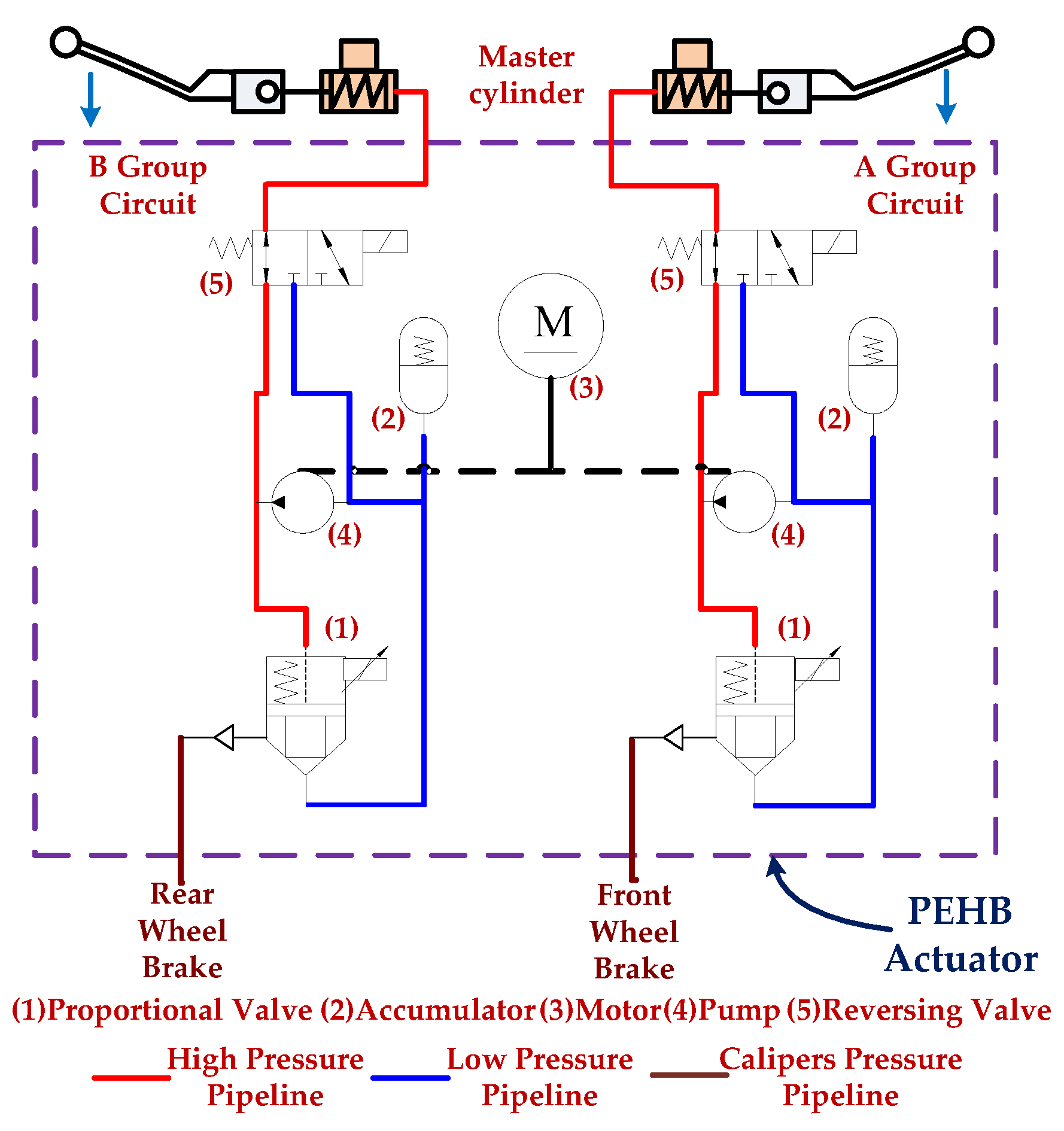
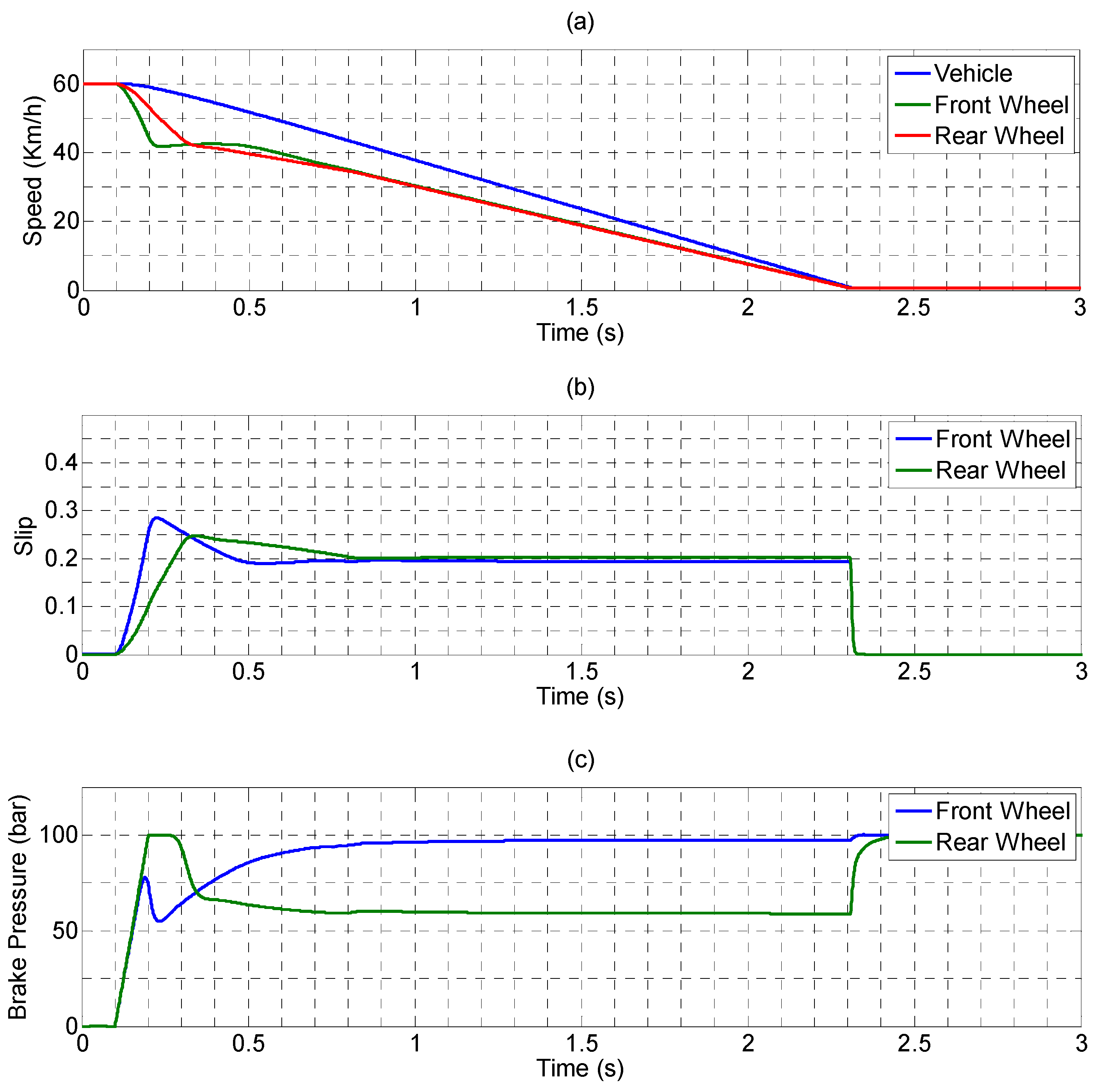
4.3. Motorcycle ABS Simulation Model for New PEHB
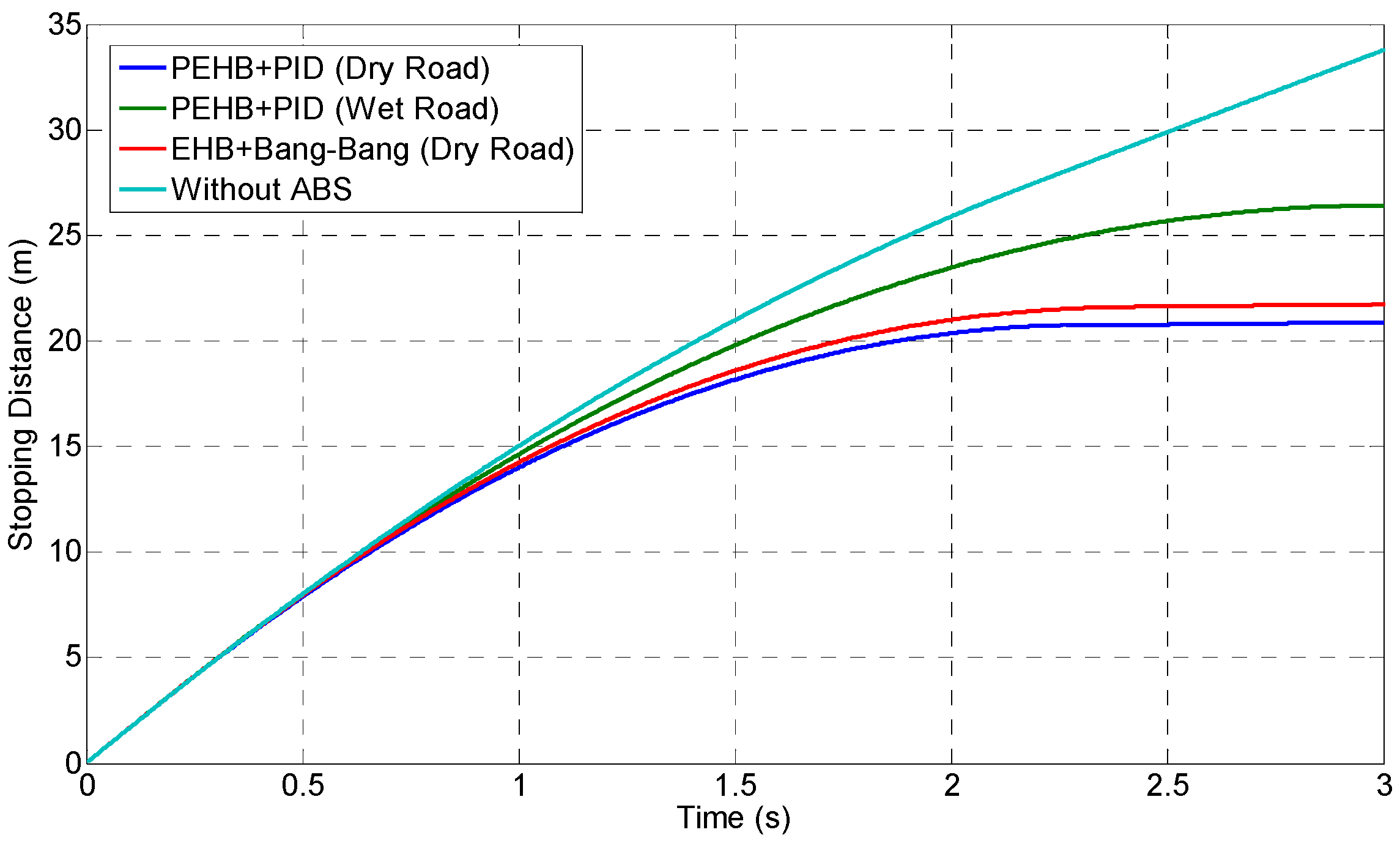
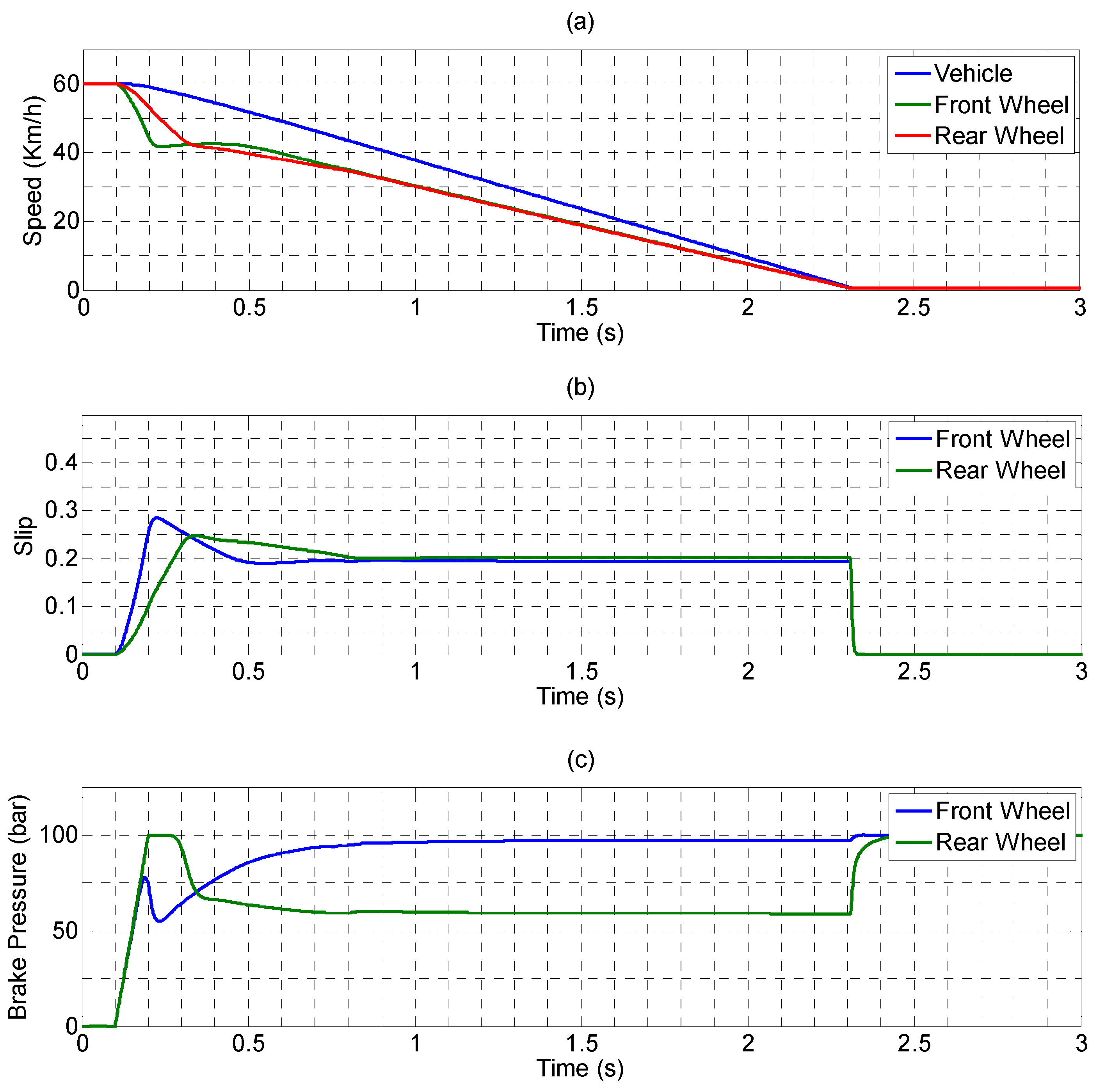
4.4. Analyses of Simulation Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wu, M.C.; Shih, M.C. Simulated and experimental study of hydraulic anti-lock braking system using sliding-mode PWM control. Mechatronics 2003, 13, 331–351. [Google Scholar] [CrossRef]
- Qiuetal, Y.; Liang, X.; Dai, Z. Backstepping dynamic surface control for an anti-skid braking system. Control Eng. Pract. 2015, 42, 140–152. [Google Scholar]
- Tanelli, M.; Sartori, R.; Savaresi, S.M. Combining Slip and Deceleration Control for Brake-by-wire Control Systems: A Sliding-mode Approach. Eur. J. Control 2007, 6, 593–611. [Google Scholar] [CrossRef]
- Lv, C.; Zhang, J.; Li, Y.; Yuan, Y. Novel control algorithm of braking energy regeneration system for an electric vehicle during safety–critical driving maneuvers. Energy Convers. Manag. 2015, 106, 520–529. [Google Scholar] [CrossRef]
- Patra, N.; Datta, K. Observer based road-tire friction estimation for slip control of braking system. Procedia Eng. 2012, 38, 1566–1574. [Google Scholar] [CrossRef]
- Bhandari, R.; Patil, S.; Singh, R.K. Surface prediction and control algorithms for anti-lock brake system. Transp. Res. Part C 2012, 21, 181–195. [Google Scholar] [CrossRef]
- Choa, J.R.; Choia, J.H.; Yoo, W.S.; Kim, G.J.; Woo, J.S. Estimation of dry road braking distance considering frictional energy of patterned tires. Finite Elem. Anal. Des. 2006, 42, 1248–1257. [Google Scholar] [CrossRef]
- Ivanov, V.; Savitski, D.; Augsburg, K.; Barber, P.; Knauder, B.; Zehetner, J. Wheel slip control for all-wheel drive electric vehicle with compensation of road disturbances. J. Terramech. 2015, 61, 1–10. [Google Scholar] [CrossRef]
- Aksjonov, A.; Augsburg, K.; Vodovozov, V. Design and Simulation of the Robust ABS and ESP Fuzzy Logic Controller on the Complex Braking Maneuvers. Appl. Sci. 2016, 6, 382. [Google Scholar] [CrossRef]
- Mirzaei, M.; Mirzaeinejad, H. Optimal design of a non-linear controller for anti-lock braking system. Transp. Res. Part C 2012, 24, 19–35. [Google Scholar] [CrossRef]
- Wang, B.; Huang, X.; Wang, J.; Guo, X.; Zhu, X. A robust wheel slip ratio control design combining hydraulic and regenerative braking systems for in-wheel-motors-driven electric Vehicles. J. Frankl. Inst. 2015, 352, 577–602. [Google Scholar] [CrossRef]
- Chen, C.P.; Chiang, M.H. Development of Proportional Pressure Control Valve for Hydraulic Braking Actuator of Automobile ABS. Appl. Sci. 2018, 8, 639. [Google Scholar] [CrossRef]
- Drakunov, S.; Özgüner, Ü.; Dix, P.; Ashrafi, B. ABS control using optimum search via sliding modes. IEEE Trans. Control Syst. Technol. 1995, 3, 79–85. [Google Scholar] [CrossRef]
- Keshmiri, R.; Shahri, A.M. Intelligent ABS Fuzzy Controller for Diverse Road Surfaces. Int. J. Mech. Syst. Sci. Eng. 2007, 1, 257–262. [Google Scholar]
- Precup, R.-E.; Preitl, S.; Faur, G. PI predictive fuzzy controllers for electrical drive speed control: Methods and software for stable development. Comput. Ind. 2003, 52, 253–270. [Google Scholar] [CrossRef]
- Chaoui, H.; Sicard, P. Adaptive fuzzy logic control of permanent magnet synchronous machines with nonlinear friction. IEEE Trans. Ind. Electron. 2012, 59, 1123–1133. [Google Scholar] [CrossRef]
- Choi, S.B.; Bang, J.H.; Cho, M.S.; Lee, Y.S. Sliding mode control for anti-lock brake system of passenger vehicles featuring electrorheological valves. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2000, 216, 897–908. [Google Scholar] [CrossRef]
- Jiang, F.; Gao, Z. An application of nonlinear PID control to a class of truck ABS problems. In Proceedings of the 40th IEEE Conference on Decision and Control, Orlando, FL, USA, 4–7 December 2001; pp. 516–521. [Google Scholar]
- Aparow, V.R.; Ahmad, F.; Hudha, K.; Jamaluddin, H. Modelling and PID control of antilock braking system with wheel slip reduction to improve braking performance. Int. J. Veh. Saf. 2013, 6, 265–296. [Google Scholar] [CrossRef]
- Astrom, K.; Hagglund, T. PID Controller: Theory, Design and Tuning; Instrument Society of America: Research Triangle Park, NC, USA, 1995. [Google Scholar]
- Astrom, K.; Hagglund, T. Advanced PID Design; ISA-The Instrumentation Systems, and Automation Society: Research Triangle Park, NC, USA, 2005. [Google Scholar]
- Rivera, D.E.; Morari, M.; Skogestad, S. Internal model control. 4. PID controller design. Ind. Eng. Chem. Process Des. Dev. 1986, 25, 252–265. [Google Scholar] [CrossRef]
- Jin, Q.B.; Liu, Q. IMC-PID design based on model matching approach and closed-loop shaping. ISA Trans. 2014, 53, 462–473. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.P.; Tung, C.; Chen, C.A. A Proportional Electro-Hydraulic Braking Control Valve. Taiwan, 2010. Patent No. I320374, 11 February 2010. [Google Scholar]
- Chen, C.A.; Tung, C.; Chen, C.P. The Proportional Solenoid Module for a Hydraulic System. Patent No. I474350, 21 February 2015. [Google Scholar]
- Lee, C.O.; Song, C.S. Analysis of the solenoid of a hydraulic proportional compound valve. In Proceedings of the 35th National Conference on Fluid, Chicago, IL, USA, 13–15 November 1979; pp. 21–30. [Google Scholar]
- Chen, Y.N.; Kuo, W.H. Analysis and Design of Proportional Pressure Control Valve. Master’s Thesis, National Taiwan University, Taipei, Taiwan, 1987. [Google Scholar]
- Lu, C.Y.; Shih, M.C. Design and Control of the Hydraulic Anti-Lock Brake System for a Light Motorcycle. Ph.D. Thesis, National Cheng Kung University, Tainan, Taiwan, 2005. [Google Scholar]
- Dugoff, H.; Fancher, P.S.; Segel, L. An Analysis of Tire Traction Properties and Their Influence on Vehicle Dynamic Performance; SAE Paper No. 700377; SAE International: Warrendale, PA, USA, 1970. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flux Path Model | Mean Path Length | ) |
|---|---|---|
| I | ||
| II | 1.22 | |
| III | 1.22 | |
| IV | ||
| V | ||
| VI |
| Symbol | Parameter | Value |
|---|---|---|
| total mass of the rider and the motorcycle | 220 Kgf | |
| height of the center of the mass of the vehicle | 0.6 m | |
| average height of the wind force acting on the motorcycle | 0.7 m | |
| wheelbase between the front and rear wheels of the motorcycle | 1.2 m | |
| distances between the front wheels and the center of mass of the vehicle | 0.7 m | |
| time-delay constant of the front shock absorber | 0.2 | |
| time-delay constant of the rear shock absorber | 0.1 | |
| air density | 1.18 kg/m3 | |
| coefficient of air resistance | 0.48 | |
| frontal area of the vehicle | 0.55 m2 | |
| tire radius | 0.21 m |
| Symbol | Parameter | Value |
|---|---|---|
| shuttle shaft and iron core mass | 0.1 Kgf | |
| damping coefficient | 0.20 Kgf-s/mm | |
| spring constant | 0.18 Kgf/mm | |
| spring initial compression value | 0.3 mm | |
| spool valve hole diameter | 1.2 mm | |
| coning angle of the needle valve | 25 | |
| bulk modulus of the liquid | 190 Kgf/mm2 | |
| Caliper pressure per unit volume | 0.06 Kgf/mm5 |
| Control Module and Mode | Road State | Braking Time (s) | Stopping Distance (m) | Slip (Steady State) |
|---|---|---|---|---|
| PEHB + PID | Dry | 2.29 | 20.88 | 0.2 ± 0.06 |
| PEHB + PID | Wet | 2.97 | 26.42 | 0.2 ± 0.03 |
| EHB + Bang-Bang | Dry | 2.40 | 21.73 | 0.2 ± 0.1 |
| Without ABS | Dry | >3 | >34.35 | 1 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.-P.; Chiang, M.-H. Mathematical Simulations and Analyses of Proportional Electro-Hydraulic Brakes and Anti-Lock Braking Systems in Motorcycles. Actuators 2018, 7, 34. https://doi.org/10.3390/act7030034
Chen C-P, Chiang M-H. Mathematical Simulations and Analyses of Proportional Electro-Hydraulic Brakes and Anti-Lock Braking Systems in Motorcycles. Actuators. 2018; 7(3):34. https://doi.org/10.3390/act7030034
Chicago/Turabian StyleChen, Che-Pin, and Mao-Hsiung Chiang. 2018. "Mathematical Simulations and Analyses of Proportional Electro-Hydraulic Brakes and Anti-Lock Braking Systems in Motorcycles" Actuators 7, no. 3: 34. https://doi.org/10.3390/act7030034
APA StyleChen, C.-P., & Chiang, M.-H. (2018). Mathematical Simulations and Analyses of Proportional Electro-Hydraulic Brakes and Anti-Lock Braking Systems in Motorcycles. Actuators, 7(3), 34. https://doi.org/10.3390/act7030034