
Flow-Induced Vibration Stability in Pilot-Operated Control Valves with Nonlinear Fluid–Structure Interaction Analysis

Abstract
1. Introduction
2. Flow Analysis of Pilot-Operated Regulating Valve
2.1. Structure and Working Principle of Control Valve
2.2. Flow Analysis
2.2.1. Turbulence Model
2.2.2. Flow Domain Geometry and Computational Mesh
2.2.3. Experimental Procedure
2.2.4. Validation of Numerical Model
2.3. Flow Analysis Results and Discussion
3. Nonlinear Modal Analysis
3.1. Principle of Fluid–Structure Coupling Modal Analysis
3.2. Boundary Conditions
3.3. Structural Geometry and Computational Mesh
3.4. Results and Discussion
3.4.1. Modal Frequency and Modal Shape
3.4.2. Stability Coefficients
3.4.3. Modal Damping Ratios and Logarithmic Decrement
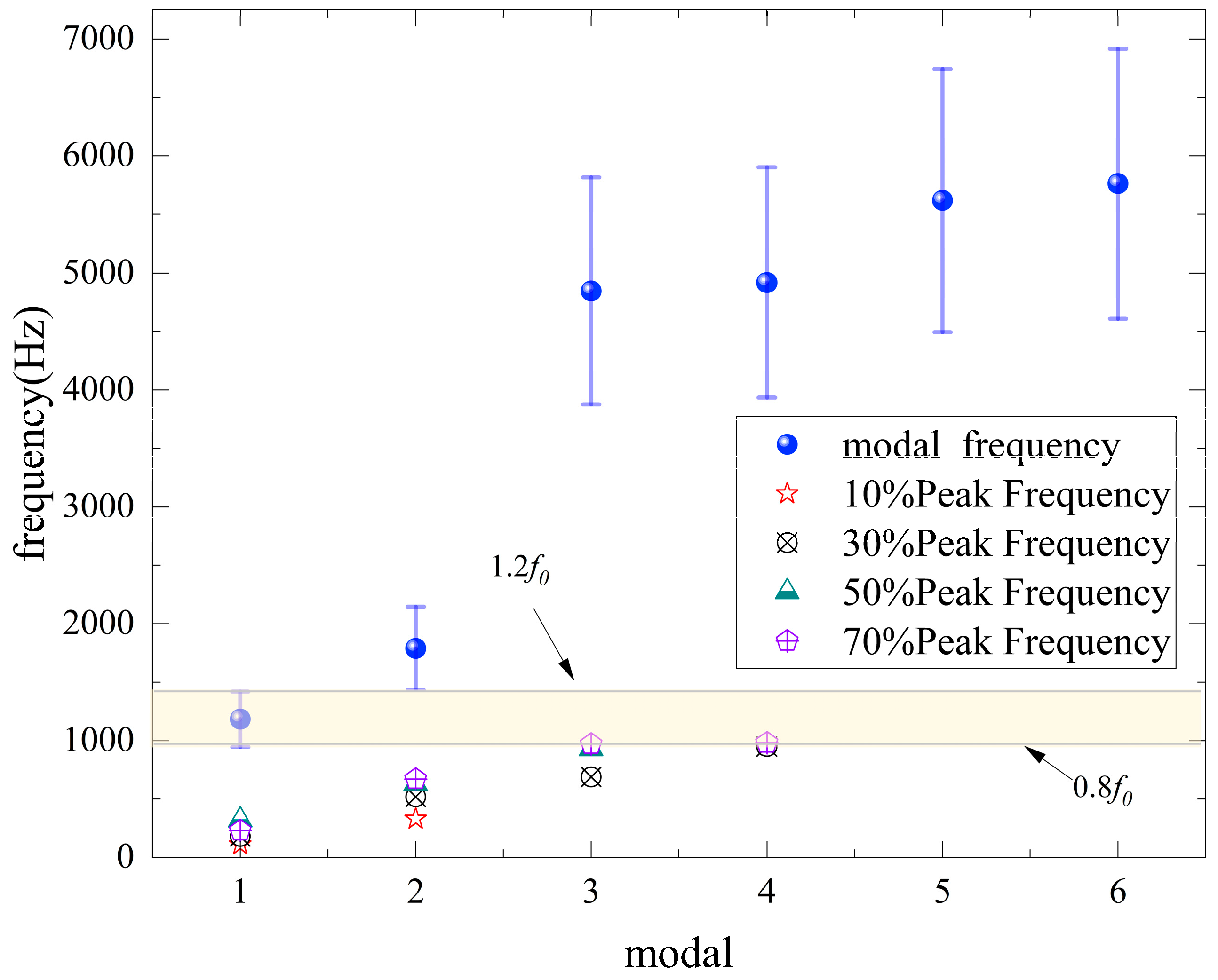
3.4.4. Comparison of Modal and Fluid Excitation Force Frequency
4. Conclusions
- (1)
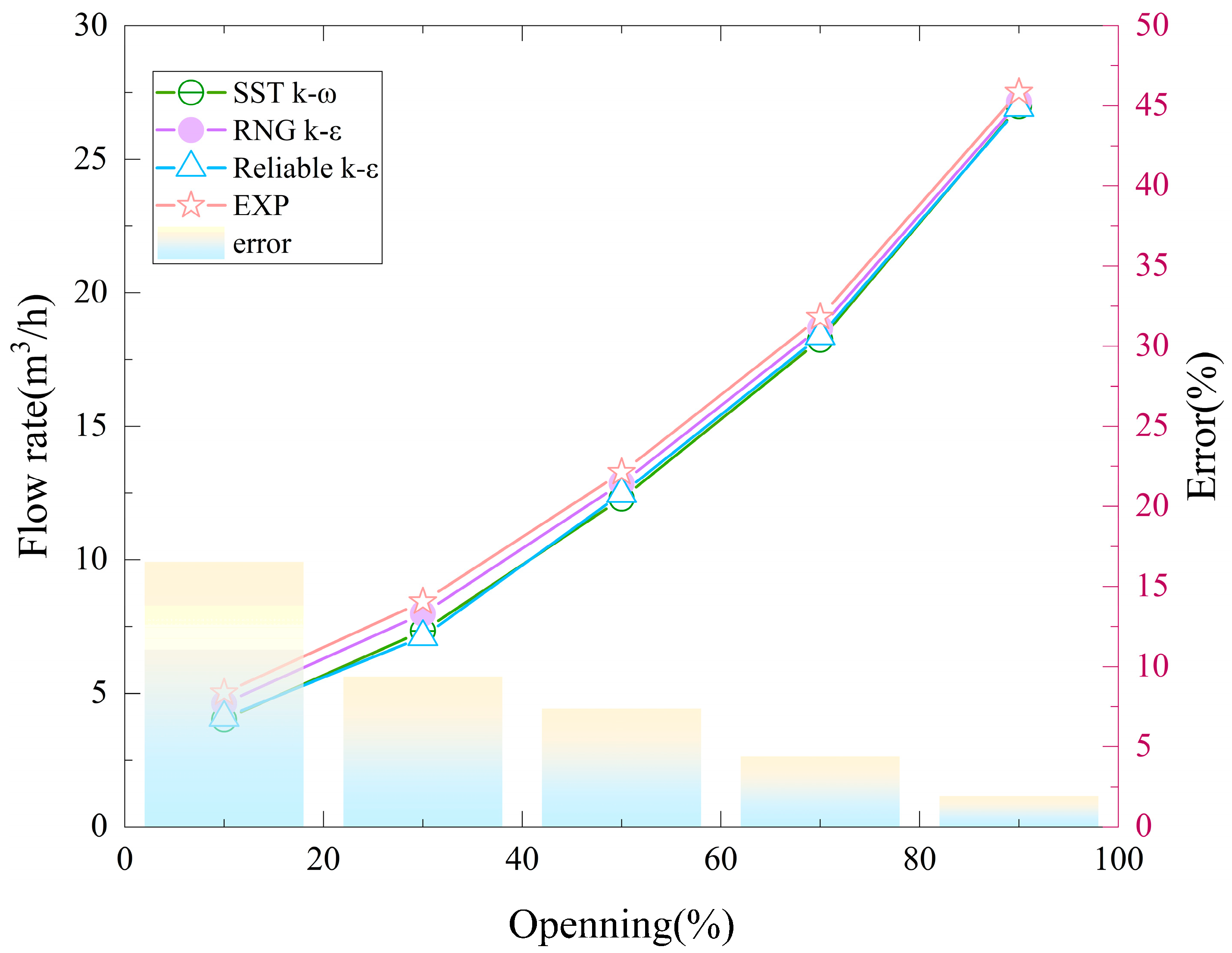
- Numerical simulations of the pilot-operated control valve’s flow were conducted using the Realizable k-ε, RNG k-ε, and SST k-ω turbulence models. Comparison with flow test results showed that the RNG k-ε model had the best agreement, with a deviation of less than 10%.
- (2)
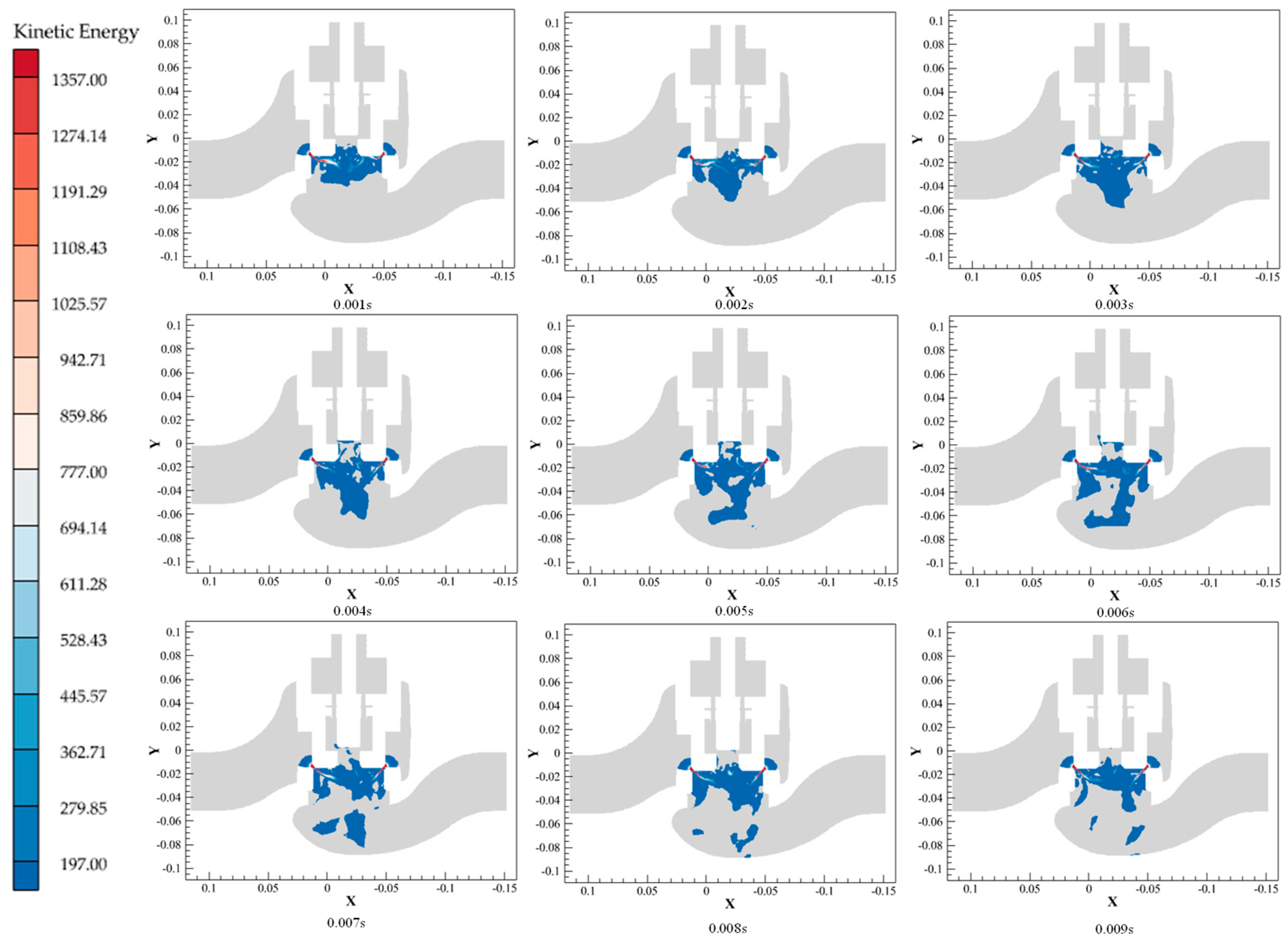
- The primary instability factors for the pilot-operated control valve’s core assembly include flow separation, backflow, and vortex formation at the throttling area of the valve core. The peak fluid excitation frequencies experienced by the valve core at typical openings ranged from 100 to 300 Hz, with the fluid excitation force at 70% opening showing a wide frequency band, with harmonic components reaching up to 1000 Hz.
- (3)
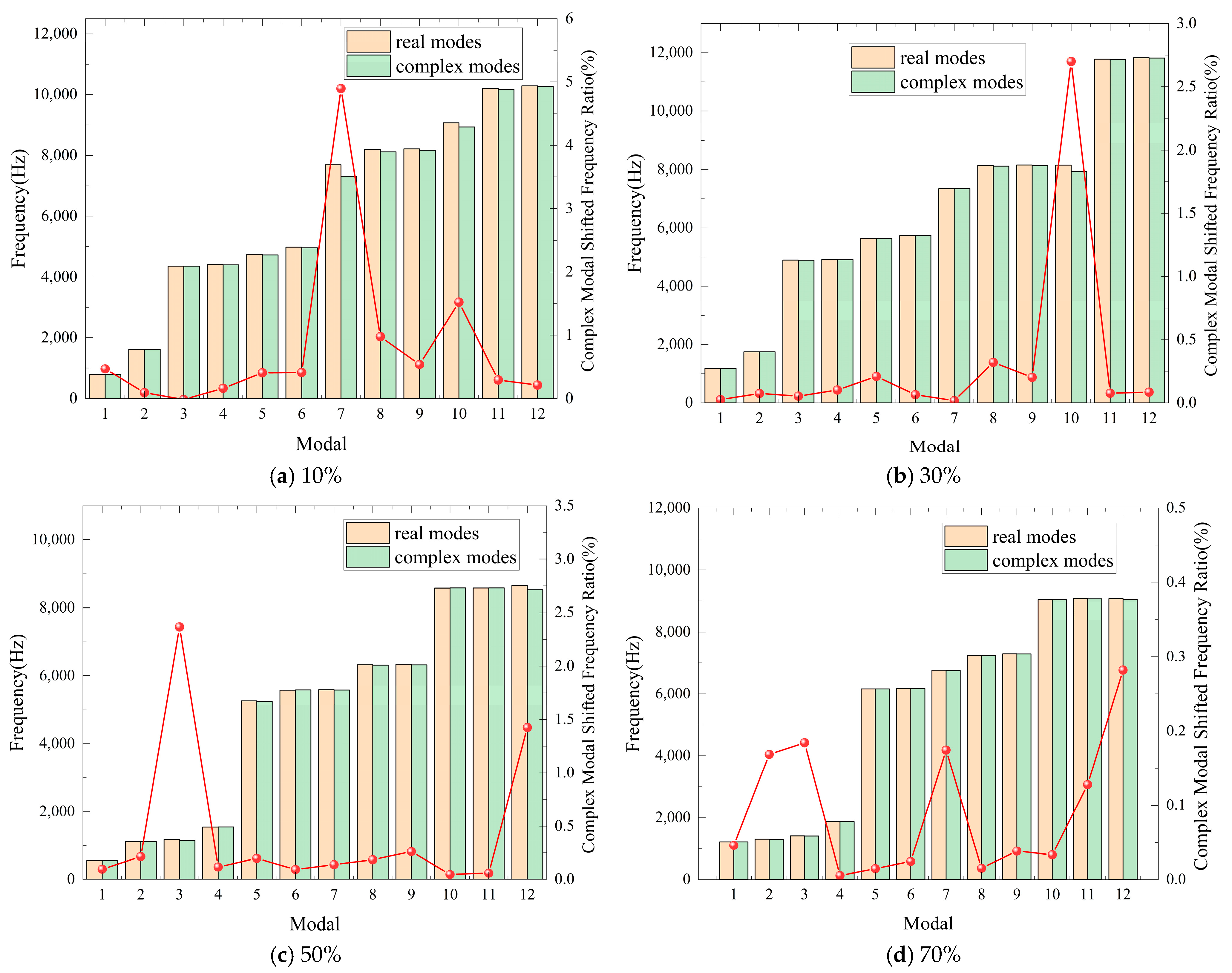
- The damping effect caused by the nonlinear relationship in the valve core assembly results in a lower complex modal frequency compared to the real modal frequency. At 10%, 30%, 50%, and 70% openings, the maximum shifts in the complex modal frequency were 4.89%, 2.7%, 1.42%, and 0.46%, respectively. Overall, the complex modal shifts remained small, all under 5%.
- (4)
- The stability coefficient for the valve core assembly across all modal orders was negative, indicating the relative stability of the valve core system. The stability coefficient of the lower-order modes was near zero, especially for the first-order mode, where critical stability conditions can occur. The stability coefficient showed a negative correlation with the modal order, suggesting that the structure remains relatively stable and safe under high-frequency excitation.
- (5)
- The modal damping ratios for the valve core assembly’s damping system were greater than 0 but significantly less than 1 across all modal orders, indicating an underdamped state. Under fluid excitation, vibrations gradually decay, and the logarithmic decay rate followed a consistent trend, suggesting the system remains relatively stable. The damping ratio of the first mode was close to 0, and excitation at the first mode frequency could lead to critical stability issues.
- (6)
- A comparison between the modal frequencies of the valve core assembly and the peak excitation frequencies from the fluid showed that at a 70% opening, the peak excitation frequency reached 959 Hz. At openings of 50% and 70%, the first-order modal frequencies of the valve core assembly were close to the resonance range of the fluid excitation frequency, making resonance likely.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jiang, Q.; Li, J.; Wang, P. Study on control characteristics of a nuclear power plant with coupled heat-pipe reactor and sCO2 Brayton cycle. Nucl. Eng. Des. 2025, 432, 113819. [Google Scholar] [CrossRef]
- Guillen, D.P. Review of passive heat removal strategies for nuclear microreactor systems. Nucl. Technol. 2023, 209, S21–S40. [Google Scholar] [CrossRef]
- Hajar, I.; Kassim, M.; Minhat, M.S.; Azmi, I.N. Optimal efficiency on nuclear reactor secondary cooling process using machine learning model. Int. J. Electr. Comput. Eng. 2024, 14, 6287–6299. [Google Scholar] [CrossRef]
- Guo, F.; Lyu, Y.; Duan, Z.; Fan, Z.; Li, W.; Chen, F. Analysis of Regulating Valve Stem Fracture in a Petrochemical Plant. Processes 2023, 11, 1106. [Google Scholar] [CrossRef]
- Zhou, C.L.; Yan, A.J.; Wei, X.; Fan, Z.D.; Zhu, L. Fracture Failure Analysis of a High-Pressure Bypass Valve Stem. J. Fail. Anal. Prev. 2023, 23, 1038–1045. [Google Scholar] [CrossRef]
- Jin, H.; Zheng, Z.; Ou, G.; Zhang, L.; Rao, J.; Shu, G.; Wang, C. Failure analysis of a high pressure differential regulating valve in coal liquefaction. Eng. Fail. Anal. 2015, 55, 115–130. [Google Scholar] [CrossRef]
- Chen, F.-q.; Cai, Q.-r.; Wei, X.-y.; Xu, Q.; Zhu, Z.-j.; Liu, W.-k.; Fan, X.-f. Study on suppression of flow-induced noise in gas turbine fuel control valves. Flow Meas. Instrum. 2025, 104, 102904. [Google Scholar] [CrossRef]
- Wang, P.; Liu, Y. Unsteady flow behavior of a steam turbine control valve in the choked condition: Field measurement, detached eddy simulation and acoustic modal analysis. Appl. Therm. Eng. 2017, 117, 725–739. [Google Scholar] [CrossRef]
- Wang, P.; Liu, Y. Influence of a circular strainer on unsteady flow behavior in steam turbine control valves. Appl. Therm. Eng. 2017, 115, 463–476. [Google Scholar] [CrossRef]
- Wei, A.-b.; Gao, R.; Zhang, W.; Wang, S.-h.; Zhou, R.; Zhang, X.-b. Computational fluid dynamics analysis on flow-induced vibration of a cryogenic poppet valve in consideration of cavitation effect. J. Zhejiang Univ.-Sci. A 2022, 23, 83–100. [Google Scholar] [CrossRef]
- Zhang, Y.; He, C.; Li, P.; Qiao, H. Numerical and experimental investigation of flow induced vibration of an ejector considering cavitation. J. Appl. Fluid Mech. 2023, 17, 251–260. [Google Scholar]
- Jin, H.; Xu, H.; Zhang, J.; Wang, C.; Liu, X. Fluid–Structure Coupling Analysis of the Vibration Characteristics of a High-Parameter Spool. Fluids 2025, 10, 105. [Google Scholar] [CrossRef]
- Duan, Y.; Revell, A.; Sinha, J.; Hahn, W. A computational fluid dynamics (CFD) analysis of fluid excitations on the spindle in a high-pressure valve. Int. J. Press. Vessel. Pip. 2019, 175, 103922. [Google Scholar] [CrossRef]
- Zeid, A.; Shouman, M. Flow-Induced Vibration on the Control Valve with a Different Concave Plug Shape Using FSI Simulation. Shock Vib. 2019, 2019, 8724089. [Google Scholar] [CrossRef]
- Zhang, G.; Wang, W.W.; Wu, Z.Y.; Chen, D.S.; Kim, H.D.; Lin, Z. Effect of the opening degree on evolution of cryogenic cavitation through a butterfly valve. Energy 2023, 283, 128543. [Google Scholar] [CrossRef]
- Yang, H.; Wang, W.; Lu, K.; Chen, Z. Cavitation reduction of a flapper-nozzle pilot valve using continuous microjets. Int. J. Heat Mass Transf. 2019, 133, 1099–1109. [Google Scholar] [CrossRef]
- Wang, H.; Hu, F.; Kong, X.; Chen, S. Pressure fluctuation of steam on the disc in a triple eccentric butterfly valve. SN Appl. Sci. 2020, 2, 1193. [Google Scholar] [CrossRef]
- Xu, D.; Ge, C.; Li, Y.; Liu, Y. Evaluation the possibility of vortex-induced resonance for a multistage pressure reducing valve. PLoS ONE 2022, 17, e0266414. [Google Scholar] [CrossRef] [PubMed]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Nominal Diameter | Operating Temperature | Operating Pressure | Valve Stroke | Working Medium |
|---|---|---|---|---|---|
| Parameter | DN50 | 25 °C | 1 MPa | 22 mm | water |
| Parts | Material | Destiny ρ/(kg/m3) | Poisson Ratio | Elastic Modulus E (GPa) |
|---|---|---|---|---|
| Valve core, valve stem | 304 | 7930 | 0.29 | 200 |
| Valve body | CF8 | 7850 | 0.29 | 193 |
| Valve bonnet | F304 | 7930 | 0.29 | 193 |
| Mesh | Nodes Number | Elements Number | Flow Rate (kg/h) |
|---|---|---|---|
| 1 | 695,141 | 3,413,174 | 5173.2 |
| 2 | 843,521 | 4,300,733 | 5778.5 |
| 3 | 10,733,368 | 5,313,572 | 5892.4 |
| 4 | 13,406,521 | 6,503,801 | 5894.7 |
| 5 | 13,406,521 | 6,503,801 | 5894.7 |
| Direction | Modal Participation Factor |
|---|---|
| X | 0.892 |
| Y | 0.899 |
| Z | 0.875 |
| ROTX | 0.937 |
| ROTY | 0.924 |
| ROTZ | 0.940 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, L.; Li, S.; Hou, J. Flow-Induced Vibration Stability in Pilot-Operated Control Valves with Nonlinear Fluid–Structure Interaction Analysis. Actuators 2025, 14, 372. https://doi.org/10.3390/act14080372
Yang L, Li S, Hou J. Flow-Induced Vibration Stability in Pilot-Operated Control Valves with Nonlinear Fluid–Structure Interaction Analysis. Actuators. 2025; 14(8):372. https://doi.org/10.3390/act14080372
Chicago/Turabian StyleYang, Lingxia, Shuxun Li, and Jianjun Hou. 2025. "Flow-Induced Vibration Stability in Pilot-Operated Control Valves with Nonlinear Fluid–Structure Interaction Analysis" Actuators 14, no. 8: 372. https://doi.org/10.3390/act14080372
APA StyleYang, L., Li, S., & Hou, J. (2025). Flow-Induced Vibration Stability in Pilot-Operated Control Valves with Nonlinear Fluid–Structure Interaction Analysis. Actuators, 14(8), 372. https://doi.org/10.3390/act14080372