
Comprehensive Comparative Analysis of Lower Limb Exoskeleton Research: Control, Design, and Application



Abstract
1. Introduction
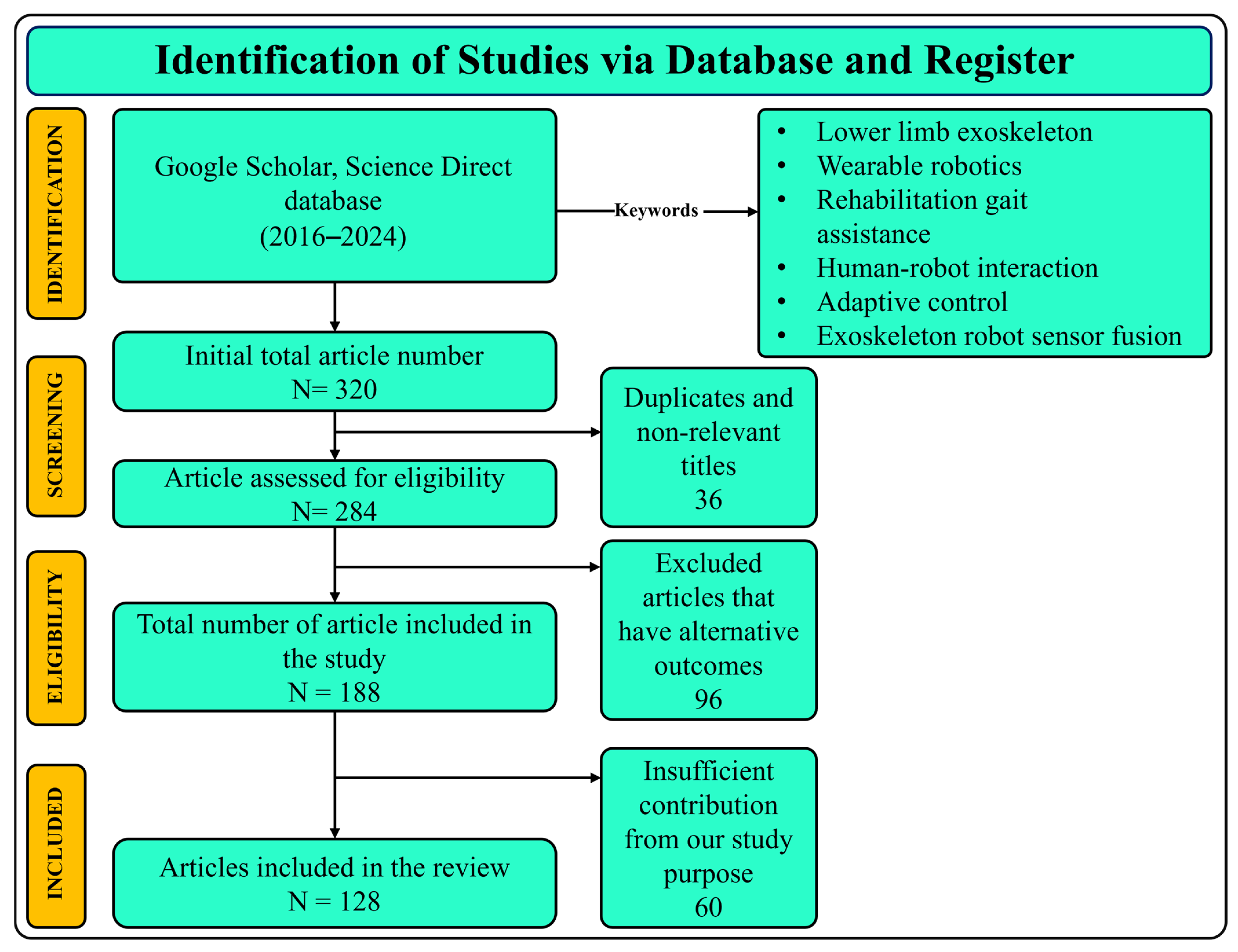
2. Methodology
2.1. Literature Search and Identification
2.2. Inclusion and Exclusion Criteria
- Focused on lower limb or full-body exoskeleton systems with application to gait, posture, or mobility.
- Introduced original control algorithms, hardware innovations, sensing modalities, or human–robot interaction mechanisms.
- Included evaluation through simulation, bench-top testing, phantom validation, or human–subject trials.
- Provided sufficient methodological detail and quantitative performance metrics.
- Purely conceptual papers without implementation or evaluation.
- Studies centered exclusively on prosthetics, orthotics, or upper-limb exoskeletons.
- Reviews, editorials, and non-peer-reviewed content.
2.3. Screening and Selection Process
2.4. Data Extraction and Thematic Classification
- Application focus (e.g., gait rehabilitation, terrain adaptation, pediatric use);
- Control strategy (e.g., impedance control, machine learning, reinforcement learning);
- Hardware and actuation (e.g., passive, powered, compliant, modular systems);
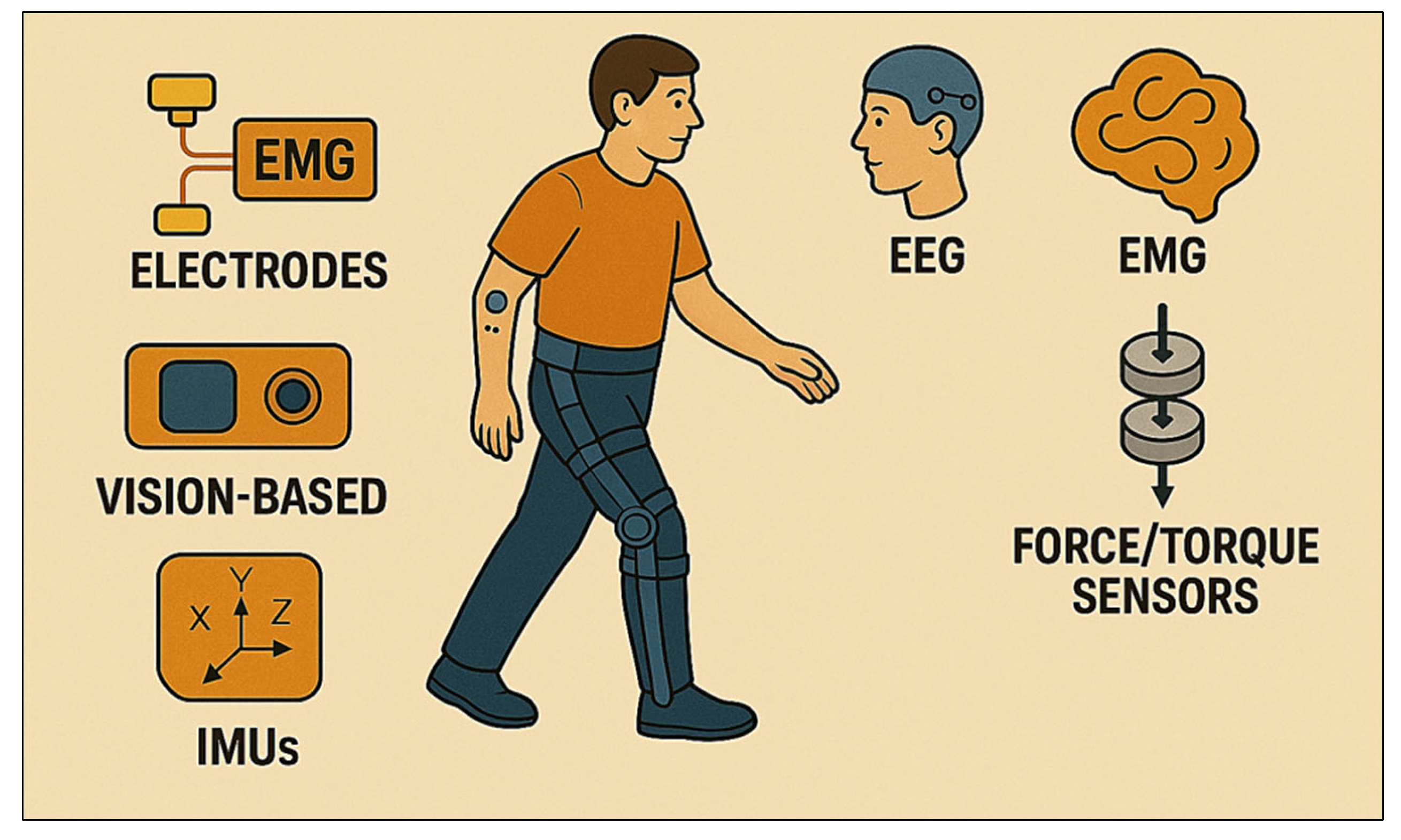
- Sensing and perception (e.g., EMG, EEG, IMU, vision-based systems);
- Human–robot interaction (e.g., adaptive assistance, intent recognition);
- Evaluation method (e.g., simulation, phantom validation, human–subject testing);
- Key contributions (e.g., novel controllers, biomechanical insights, clinical findings).
3. Application Focus
3.1. Clinical Rehabilitation and Gait Restoration
3.2. Cognitive-Motor Integration and Intention Recognition
3.3. Terrain Adaptation and Environment-Aware Gait Assistance
3.4. Load-Bearing and Occupational Support
3.5. Posture Support and Self-Balancing Systems
3.6. Energy Efficiency and Regeneration
3.7. Evaluation and Performance Benchmarking
4. Control Strategy of Human Lower Limb Exoskeleton Robots
4.1. Model-Based and Adaptive Control Strategies
4.2. Impedance, Compliance, and Torque Control Approaches
4.3. Intelligent and Learning-Based Control Architectures
4.4. Terrain-Adaptive and Gait-Phase-Aware Controllers
4.5. Event-Triggered and Energy-Efficient Controllers
4.6. Motion Prediction and User Intention Estimation
4.7. Structural, Multi-Modal, and Self-Balancing Control
4.8. Evaluation and Biomechanical Feedback Controllers
5. Sensing Modalities and Perception
5.1. Vision and Inertial Fusion for Terrain and Motion Perception
5.2. EEG and Brain-Computer Interface-Based Sensing
5.3. EMG, MMG, and Hybrid Biosignal Sensing
5.4. Ground Reaction Force (GRF), Pressure, and Force Sensor Integration
5.5. Multimodal Sensor Fusion and Deep Learning Enhancements
5.6. Phantom Systems and Simulation Validation
5.7. Pediatric and Pathological Gait Monitoring
5.8. Gait Performance and Classification Systems
5.9. IMU and Terrain-Linked Perception
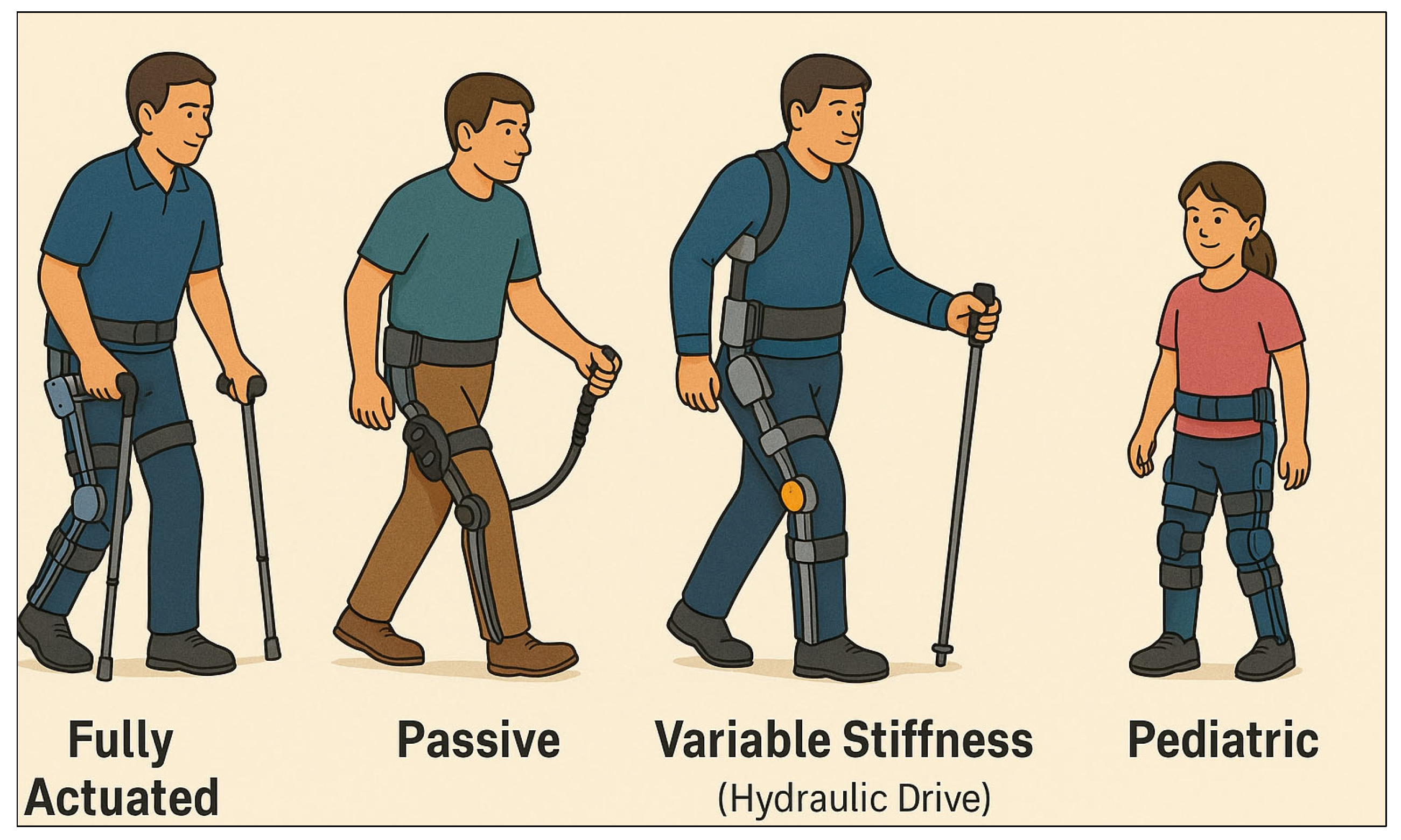
6. Hardware Design and Actuation
6.1. Standard Multi-DOF Powered Systems
6.2. Passive and Mechanically Intelligent Designs
6.3. Compliant and Bio-Inspired Actuation
6.4. Pediatric and Lightweight Adaptations
6.5. Modular and Terrain-Adaptive Platforms
6.6. High-Fidelity Sensing and Phantom-Based Hardware
6.7. Digital Twin and AI-Augmented Hardware
6.8. Torque-Sensing and Deep Learning-Enhanced Designs
6.9. Embedded Sensor Platforms for Gait Evaluation
6.10. Lightweight, Foldable, and Wearable Systems
6.11. Self-Balancing and Whole-Body Support Systems
6.12. Trunk-Lower Limb Coordination Systems
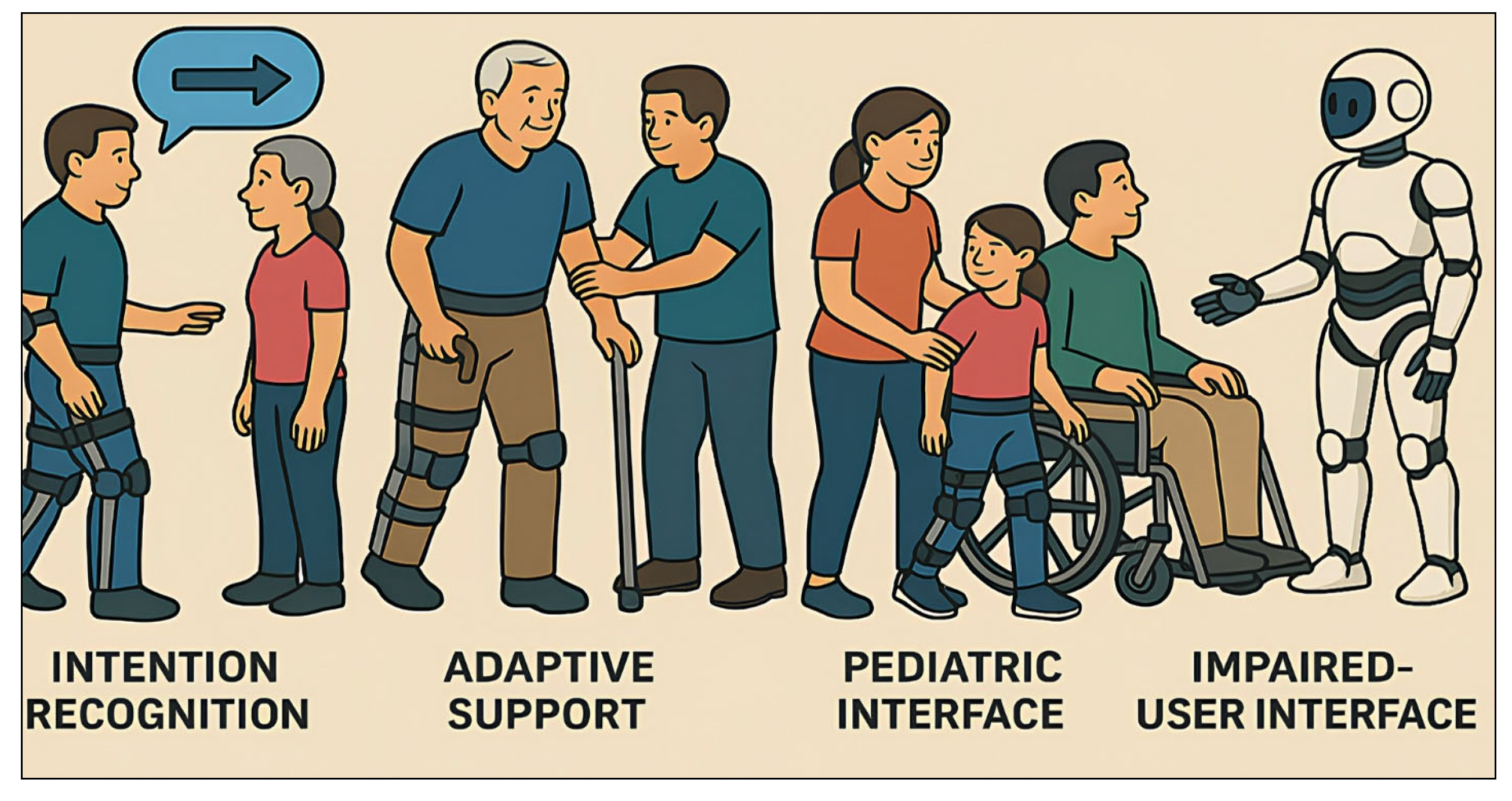
7. Human–Robot Interaction (HRI) Approach
7.1. Gait-Adaptive and Torque-Based Interaction
7.2. Biosignal-Driven Intention Recognition
7.3. Fault-Tolerant and Safe Interaction Control
7.4. Bio-Inspired Compliance and Physical Alignment
7.5. Personalized Assistance for Special Populations
7.6. Evaluation-Based and Performance-Aware HRI
7.7. Human-in-the-Loop and Impedance Control Approaches
7.8. Terrain-Adaptive and Environment-Aware Support
7.9. Symmetry and Balance-Oriented HRI
7.10. Passive Assistance for Ergonomic Support
7.11. Adaptive Support Based on Capability
7.12. Trajectory Learning and Predictive HRI
8. Evaluation Methods and Subjects
8.1. Simulations and Healthy Subject Testing
8.2. Pathological and Comparative Clinical Evaluations
8.3. Terrain-Specific and Outdoor Evaluations
8.4. Biosignal Validation and Dataset-Based Evaluations
8.5. Biomechanical Evaluation and Phantom-Based Testing
8.6. Validation of Control Accuracy and Tracking
8.7. Fall Recovery, Balance, and Stability Evaluation
8.8. Multimodal Functional and Cooperative Testing
8.9. Simulation-Only or Early-Stage Studies
9. Key Innovations/Contributions
9.1. Breakthroughs in Control Architectures and Learning-Based Adaptation
9.2. Terrain Awareness, Gait Phase Prediction, and Environment Adaptation
9.3. Robust and Fault-Tolerant Control Mechanisms
9.4. Passive and Energy-Efficient Mechanical Innovations
9.5. Pediatric, Pathology-Aware, and Gait-Impaired Innovations
9.6. Human–Robot Cooperation and Biomechanical Evaluation
9.7. Reinforcement Learning, HRI Modeling, and Co-Adaptive Interfaces
9.8. Gait Pattern Generation, Symmetry, and Predictive Modeling
9.9. Classification and Segmentation Accuracy
10. Future Research Recommendations
10.1. Development of Standardized Evaluation Protocols and Benchmarking Tools
10.2. Conducting Long-Term, Real-World Usability and Efficacy Studies
10.3. Advancing Environmental Perception and Predictive Control
10.4. Improving the Reliability and Intuitiveness of User Intent Recognition
10.5. Developing Robust and Efficient Learning-Based Personalization Frameworks
10.6. Investigating Human–Robot Co-Adaptation and Long-Term Interaction Dynamics
10.7. Exploring Synergies in Hybrid Systems and Multimodal Assistance
10.8. Enhancing Trust, Transparency, and Safety Through Explainable AI
10.9. Deepening Focus on Specific User Populations and Contexts
11. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Moriarty, B.; Jacob, T.; Sadlowski, M.; Fowler, M.; Rowan, C.; Chavarria, J.; Avramis, I.; Rizkalla, J. The Use of Exoskeleton Robotic Training on Lower Extremity Function in Spinal Cord Injuries: A Systematic Review. J. Orthop. 2025, 65, 1–7. [Google Scholar] [CrossRef]
- Hunt, M.; Everaert, L.; Brown, M.; Muraru, L.; Hatzidimitriadou, E.; Desloovere, K. Effectiveness of Robotic Exoskeletons for Improving Gait in Children with Cerebral Palsy: A Systematic Review. Gait Posture 2022, 98, 343–354. [Google Scholar] [CrossRef]
- Sarajchi, M.; Al-Hares, M.K.; Sirlantzis, K. Wearable Lower-Limb Exoskeleton for Children with Cerebral Palsy: A Systematic Review of Mechanical Design, Actuation Type, Control Strategy, and Clinical Evaluation. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 2695–2720. [Google Scholar] [CrossRef]
- Gesta, A.; Achiche, S.; Mohebbi, A. Design Considerations for the Development of Lower Limb Pediatric Exoskeletons: A Literature Review. IEEE Trans. Med. Robot. Bionics 2023, 5, 768–779. [Google Scholar] [CrossRef]
- Li, L.L.; Cao, G.Z.; Liang, H.J.; Zhang, Y.P.; Cui, F. Human Lower Limb Motion Intention Recognition for Exoskeletons: A Review. IEEE Sens. J. 2023, 23, 30007–30036. [Google Scholar] [CrossRef]
- Zhang, Y.P.; Cao, G.Z.; Li, L.L.; Diao, D.F. Interactive Control of Lower Limb Exoskeleton Robots: A Review. IEEE Sens. J. 2024, 24, 5759–5784. [Google Scholar] [CrossRef]
- Sun, Y.; Tang, Y.; Zheng, J.; Dong, D.; Chen, X.; Bai, L. From Sensing to Control of Lower Limb Exoskeleton: A Systematic Review. Annu. Rev. Control 2022, 53, 83–96. [Google Scholar] [CrossRef]
- Hamza, M.F.; Ghazilla, R.A.R.; Muhammad, B.B.; Yap, H.J. Balance and Stability Issues in Lower Extremity Exoskeletons: A Systematic Review. Biocybern. Biomed. Eng. 2020, 40, 1666–1679. [Google Scholar] [CrossRef]
- Pinto-Fernandez, D.; Torricelli, D.; Sanchez-Villamanan, M.D.C.; Aller, F.; Mombaur, K.; Conti, R.; Vitiello, N.; Moreno, J.C.; Pons, J.L. Performance Evaluation of Lower Limb Exoskeletons: A Systematic Review. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 1573–1583. [Google Scholar] [CrossRef]
- Hybart, R.L.; Ferris, D.P. Embodiment for Robotic Lower-Limb Exoskeletons: A Narrative Review. IEEE Trans. Neural Syst. Rehabil. Eng. 2023, 31, 657–668. [Google Scholar] [CrossRef]
- ChatGPT 4.0. Available online: https://chatgpt.com/ (accessed on 13 June 2025).
- Amiri, M.S.; Ramli, R.; Van, M. Swarm-Initialized Adaptive Controller with Beetle Antenna Searching of Wearable Lower Limb Exoskeleton for Sit-to-Stand and Walking Motions. ISA Trans. 2025, 158, 640–653. [Google Scholar] [CrossRef] [PubMed]
- Kou, J.; Wang, Y.; Shi, Y.; Xu, S.; Zhan, H.; Guo, Q. Active Control Strategy of Lower Limb Exoskeleton Based on Variable Admittance Control. Rob. Auton. Syst. 2025, 186, 104906. [Google Scholar] [CrossRef]
- Wang, Y.; Tian, Y.; Guo, Y.; Wang, H. Active Torque-Based Gait Adjustment Multi-Level Control Strategy for Lower Limb Patient–Exoskeleton Coupling System in Rehabilitation Training. Math. Comput. Simul. 2024, 215, 357–381. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, H.; Tian, Y. Adaptive Interaction Torque-Based AAN Control for Lower Limb Rehabilitation Exoskeleton. ISA Trans. 2022, 128, 184–197. [Google Scholar] [CrossRef]
- Lu, X.; Chen, X.; Bai, Y.; Liu, R. Explicit Model Based Fuzzy Control Method for Lower Limb Exoskeleton Robot. Expert. Syst. Appl. 2025, 270, 126601. [Google Scholar] [CrossRef]
- Yang, Y.; Huang, D.; Ma, L.; Liu, X.; Li, Y. Adaptive Neural Fault-Tolerant Prescribed Performance Control of a Rehabilitation Exoskeleton for Lower Limb Passive Training. ISA Trans. 2024, 151, 143–152. [Google Scholar] [CrossRef]
- Khamar, M.; Edrisi, M.; Forghany, S. Designing a Robust Controller for a Lower Limb Exoskeleton to Treat an Individual with Crouch Gait Pattern in the Presence of Actuator Saturation. ISA Trans. 2022, 126, 513–532. [Google Scholar] [CrossRef]
- Zhang, S.; Zhu, J.; Huang, T.H.; Yu, S.; Huang, J.S.; Lopez-Sanchez, I.; Devine, T.; Abdelhady, M.; Zheng, M.; Bulea, T.C.; et al. Actuator Optimization and Deep Learning-Based Control of Pediatric Knee Exoskeleton for Community-Based Mobility Assistance. Mechatronics 2024, 97, 103109. [Google Scholar] [CrossRef]
- Sun, W.; Lin, J.W.; Su, S.F.; Wang, N.; Er, M.J. Reduced Adaptive Fuzzy Decoupling Control for Lower Limb Exoskeleton. IEEE Trans. Cybern. 2021, 51, 1099–1109. [Google Scholar] [CrossRef]
- Zhang, S.; Guan, X.; Ye, J.; Chen, G.; Zhang, Z.; Leng, Y. Gait Deviation Correction Method for Gait Rehabilitation with a Lower Limb Exoskeleton Robot. IEEE Trans. Med. Robot. Bionics 2022, 4, 754–763. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, Y.; Luan, M.; Peng, A.; Ye, J.; Chen, G.; Fu, C.; Leng, Y.; Wu, X. Generation & Clinical Validation of Individualized Gait Trajectory for Stroke Patients Based on Lower Limb Exoskeleton Robot. IEEE Trans. Autom. Sci. Eng. 2024, 22, 1–12. [Google Scholar] [CrossRef]
- Nasiri, R.; Shushtari, M.; Rouhani, H.; Arami, A. Virtual Energy Regulator: A Time-Independent Solution for Control of Lower Limb Exoskeletons. IEEE Robot. Autom. Lett. 2021, 6, 7699–7705. [Google Scholar] [CrossRef]
- Li, W.; Ma, Y.; Shao, K.; Yi, Z.; Cao, W.; Yin, M.; Xu, T.; Wu, X. The Human-Machine Interface Design Based on SEMG and Motor Imagery EEG for Lower Limb Exoskeleton Assistance System. IEEE Trans. Instrum. Meas. 2024, 73, 6502914. [Google Scholar] [CrossRef]
- Zou, C.; Peng, Z.; Zhang, L.; Mu, F.; Huang, R.; Cheng, H. Optimization-Based Adaptive Assistance for Lower Limb Exoskeleton Robots with a Robotic Walker via Spatially Quantized Gait. IEEE Trans. Autom. Sci. Eng. 2024, 22, 2806–2818. [Google Scholar] [CrossRef]
- Andrade, R.M.; Bonato, P. The Role Played by Mass, Friction, and Inertia on the Driving Torques of Lower-Limb Gait Training Exoskeletons. IEEE Trans. Med. Robot. Bionics 2021, 3, 125–136. [Google Scholar] [CrossRef]
- Mehr, J.K.; Sharifi, M.; Mushahwar, V.K.; Tavakoli, M. Intelligent Locomotion Planning with Enhanced Postural Stability for Lower-Limb Exoskeletons. IEEE Robot. Autom. Lett. 2021, 6, 7588–7595. [Google Scholar] [CrossRef]
- Qiu, S.; Pei, Z.; Shi, J.; Zhang, X.; Wang, C.; Tang, Z. Design-Modeling and Control of a Novel Wearable Exoskeleton for Lower-Limb Enhancement. IEEE Robot. Autom. Lett. 2024, 9, 6640–6647. [Google Scholar] [CrossRef]
- Casas, J.; Chang, C.H.; Duenas, V.H. Switched Concurrent Learning Adaptive Control for Treadmill Walking Using a Lower Limb Hybrid Exoskeleton. IEEE Trans. Control Syst. Technol. 2024, 32, 174–188. [Google Scholar] [CrossRef]
- Yu, L.; Bai, S. A Modified Dynamic Movement Primitive Algorithm for Adaptive Gait Control of a Lower Limb Exoskeleton. IEEE Trans. Hum. Mach. Syst. 2024, 54, 778–787. [Google Scholar] [CrossRef]
- Huo, W.; Moon, H.; Alouane, M.A.; Bonnet, V.; Huang, J.; Amirat, Y.; Vaidyanathan, R.; Mohammed, S. Impedance Modulation Control of a Lower-Limb Exoskeleton to Assist Sit-to-Stand Movements. IEEE Trans. Robot. 2022, 38, 1230–1249. [Google Scholar] [CrossRef]
- Chen, Y.; Miao, S.; Chen, G.; Ye, J.; Fu, C.; Liang, B.; Song, S.; Li, X. Learning to Assist Different Wearers in Multitasks: Efficient and Individualized Human-in-the-Loop Adaptation Framework for Lower-Limb Exoskeleton. IEEE Trans. Robot. 2024, 40, 4699–4718. [Google Scholar] [CrossRef]
- Ma, Y.; Wu, X.; Yang, S.X.; Dang, C.; Liu, D.X.; Wang, C.; Wang, C.; Chen, C. Online Gait Planning of Lower-Limb Exoskeleton Robot for Paraplegic Rehabilitation Considering Weight Transfer Process. IEEE Trans. Autom. Sci. Eng. 2021, 18, 414–425. [Google Scholar] [CrossRef]
- Otalora, S.; Ballen-Moreno, F.; Arciniegas-Mayag, L.; Munera, M.; Cifuentes, C.A. The AGoRA V2 Unilateral Lower-Limb Exoskeleton: Mechatronic Integration and Biomechanical Assessment. IEEE Robot. Autom. Lett. 2022, 7, 7928–7933. [Google Scholar] [CrossRef]
- Aguirre-Ollinger, G.; Yu, H. Lower-Limb Exoskeleton with Variable-Structure Series Elastic Actuators: Phase-Synchronized Force Control for Gait Asymmetry Correction. IEEE Trans. Robot. 2021, 37, 763–779. [Google Scholar] [CrossRef]
- Bergmann, L.; Voss, D.; Leonhardt, S.; Ngo, C. Lower-Limb Exoskeleton with Compliant Actuators: Human Cooperative Control. IEEE Trans. Med. Robot. Bionics 2023, 5, 717–729. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, R.; Miao, Y.; An, M.; Wang, S.; Zhang, Y. PI2-Based Adaptive Impedance Control for Gait Adaption of Lower Limb Exoskeleton. IEEE/ASME Trans. Mechatron. 2024, 29, 4251–4261. [Google Scholar] [CrossRef]
- Arceo, J.C.; Yu, L.; Bai, S. Robust Sensor Fusion and Biomimetic Control of a Lower-Limb Exoskeleton with Multimodal Sensors. IEEE Trans. Autom. Sci. Eng. 2024, 22, 5425–5435. [Google Scholar] [CrossRef]
- Li, Y.A.; Chen, Z.J.; He, C.; Wei, X.P.; Xia, N.; Gu, M.H.; Xiong, C.H.; Zhang, Q.; Kesar, T.M.; Huang, X.L.; et al. Exoskeleton-Assisted Sit-to-Stand Training Improves Lower-Limb Function Through Modifications of Muscle Synergies in Subacute Stroke Survivors. IEEE Trans. Neural Syst. Rehabil. Eng. 2023, 31, 3095–3105. [Google Scholar] [CrossRef]
- Livolsi, C.; Sanz-Morere, C.B.; Pergolini, A.; Giffone, A.; Giovacchini, F.; Frioriksson, P.; Alexandersson, A.; Macchi, C.; Trigili, E.; Crea, S.; et al. Enhancing Walking Performance with a Bilateral Hip Exoskeleton Assistance in Individuals with Above-Knee Amputation. IEEE Trans. Neural Syst. Rehabil. Eng. 2024, 32, 2553–2563. [Google Scholar] [CrossRef]
- Huang, P.; Li, Z.; Zhou, M.C.; Li, X.; Cheng, M. Fuzzy Enhanced Adaptive Admittance Control of a Wearable Walking Exoskeleton with Step Trajectory Shaping. IEEE Trans. Fuzzy Syst. 2022, 30, 1541–1552. [Google Scholar] [CrossRef]
- Chen, J.; Han, J.; Zhang, J. Design and Evaluation of a Mobile Ankle Exoskeleton with Switchable Actuation Configurations. IEEE/ASME Trans. Mechatron. 2022, 27, 1846–1853. [Google Scholar] [CrossRef]
- Li, H.; Sui, D.; Ju, H.; An, Y.; Zhao, J.; Zhu, Y. Mechanical Compliance and Dynamic Load Isolation Design of Lower Limb Exoskeleton for Locomotion Assistance. IEEE/ASME Trans. Mechatron. 2022, 27, 5392–5402. [Google Scholar] [CrossRef]
- Li, G.; Liang, X.; Lu, H.; Su, T.; Hou, Z.G. Development and Validation of a Self-Aligning Knee Exoskeleton with Hip Rotation Capability. IEEE Trans. Neural Syst. Rehabil. Eng. 2024, 32, 472–481. [Google Scholar] [CrossRef]
- Küçüktabak, E.B.; Wen, Y.; Kim, S.J.; Short, M.R.; Ludvig, D.; Hargrove, L.; Perreault, E.J.; Lynch, K.M. Haptic Transparency and Interaction Force Control for a Lower-Limb Exoskeleton. IEEE Trans. Robot. 2023, 40, 1842–1859. [Google Scholar] [CrossRef]
- Huang, C.; Ji, S.; Chen, Z.; Sun, T.; Guo, Q.; Yan, Y. Identification and Analysis of Human-Exoskeleton Coupling Parameters in Lower Extremities. IEEE Trans. Haptics 2024, 17, 650–661. [Google Scholar] [CrossRef]
- Medrano, R.L.; Thomas, G.C.; Keais, C.G.; Rouse, E.J.; Gregg, R.D. Real-Time Gait Phase and Task Estimation for Controlling a Powered Ankle Exoskeleton on Extremely Uneven Terrain. IEEE Trans. Robot. 2023, 39, 2170–2182. [Google Scholar] [CrossRef]
- Zhang, J.; Zhu, A.; Li, X.; Song, J.; Bao, B.; Su, Y.; Xu, P.; Zheng, C.; Shi, L.; Zhang, X. Parallel Elastic Self-Alignment Mechanism Enhances Energy Efficiency and Reduces Misalignment in a Powered Knee Exoskeleton. IEEE Trans. Biomed. Eng. 2025, 72, 528–539. [Google Scholar] [CrossRef]
- Chen, J.; Ding, J.; Han, J.; Zhang, J. Design and Evaluation of a Bilateral Mobile Ankle Exoskeleton with High-Efficiency Actuation. IEEE Robot. Autom. Lett. 2024, 9, 5528–5535. [Google Scholar] [CrossRef]
- Sharifi, M.; Mehr, J.K.; Mushahwar, V.K.; Tavakoli, M. Autonomous Locomotion Trajectory Shaping and Nonlinear Control for Lower Limb Exoskeletons. IEEE/ASME Trans. Mechatron. 2022, 27, 645–655. [Google Scholar] [CrossRef]
- Bergmann, L.; Hansmann, L.; Von Platen, P.; Leonhardt, S.; Ngo, C. Fatigue Assessment and Control with Lower Limb Exoskeletons. IEEE Trans. Hum. Mach. Syst. 2024, 55, 10–22. [Google Scholar] [CrossRef]
- Akkawutvanich, C.; Manoonpong, P. Personalized Symmetrical and Asymmetrical Gait Generation of a Lower Limb Exoskeleton. IEEE Trans. Ind. Inform. 2023, 19, 9798–9808. [Google Scholar] [CrossRef]
- Bergmann, L.; Luck, O.; Voss, D.; Buschermohle, P.; Liu, L.; Leonhardt, S.; Ngo, C. Lower Limb Exoskeleton with Compliant Actuators: Design, Modeling, and Human Torque Estimation. IEEE/ASME Trans. Mechatron. 2023, 28, 758–769. [Google Scholar] [CrossRef]
- Zhang, M.; Huang, J.; Cao, Y.; Xiong, C.H.; Mohammed, S. Echo State Network-Enhanced Super-Twisting Control of Passive Gait Training Exoskeleton Driven by Pneumatic Muscles. IEEE/ASME Trans. Mechatron. 2022, 27, 5107–5118. [Google Scholar] [CrossRef]
- Li, F.; Chen, Z.; Yang, M.; Tian, D.; Gao, F.; Wu, X. A Robust Following Controller for Lower Limb Exoskeletons with a Decoding Human Motion Intention Network Under Small Sample Conditions. IEEE/ASME Trans. Mechatron. 2024, 1–12. [Google Scholar] [CrossRef]
- Chiu, V.L.; Raitor, M.; Collins, S.H. Design of a Hip Exoskeleton with Actuation in Frontal and Sagittal Planes. IEEE Trans. Med. Robot. Bionics 2021, 3, 773–782. [Google Scholar] [CrossRef]
- Meng, W.; Tian, Z.; Zhu, C.; Ai, Q.; Liu, Q. Optimized Impedance Control of a Lightweight Gait Rehabilitation Exoskeleton Based on Accurate Knee Joint Torque Estimation. IEEE Trans. Med. Robot. Bionics 2024, 6, 1648–1657. [Google Scholar] [CrossRef]
- Kang, I.; Molinaro, D.D.; Choi, G.; Camargo, J.; Young, A.J. Subject-Independent Continuous Locomotion Mode Classification for Robotic Hip Exoskeleton Applications. IEEE Trans. Biomed. Eng. 2022, 69, 3234–3242. [Google Scholar] [CrossRef]
- Wang, X.; Guo, S.; Qu, B.; Bai, S. Design and Experimental Verification of a Hip Exoskeleton Based on Human-Machine Dynamics for Walking Assistance. IEEE Trans. Hum. Mach. Syst. 2023, 53, 85–97. [Google Scholar] [CrossRef]
- Lin, J.; Divekar, N.V.; Thomas, G.C.; Gregg, R.D. Optimally Biomimetic Passivity-Based Control of a Lower-Limb Exoskeleton Over the Primary Activities of Daily Life. IEEE Open J. Control Syst. 2022, 1, 15–28. [Google Scholar] [CrossRef]
- Carrasquillo, C.; Bajpai, A.; Iyengar, D.; Collins, K.; Mazumdar, A.; Young, A.J. Enhancing Human Navigation Ability Using Force-Feedback from a Lower-Limb Exoskeleton. IEEE Trans. Haptics 2025, 18, 312–324. [Google Scholar] [CrossRef]
- Lin, J.; Divekar, N.V.; Lv, G.; Gregg, R.D. Optimal Task-Invariant Energetic Control for a Knee-Ankle Exoskeleton. IEEE Control Syst. Lett. 2021, 5, 1711–1716. [Google Scholar] [CrossRef]
- Soriano-Segura, P.; Ortiz, M.; Iáñez, E.; Azorín, J.M. Design of a Brain-Machine Interface for Reducing False Activations of a Lower-Limb Exoskeleton Based on Error Related Potential. Comput. Methods Programs Biomed. 2024, 255, 108332. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, D.; Chen, W.; Pei, Z.; Wang, J. Boosting Lower-Limb Motor Imagery Performance through an Ensemble Method for Gait Rehabilitation. Comput. Biol. Med. 2024, 169, 107910. [Google Scholar] [CrossRef]
- Tortora, S.; Tonin, L.; Sieghartsleitner, S.; Ortner, R.; Guger, C.; Lennon, O.; Coyle, D.; Menegatti, E.; Del Felice, A. Effect of Lower Limb Exoskeleton on the Modulation of Neural Activity and Gait Classification. IEEE Trans. Neural Syst. Rehabil. Eng. 2023, 31, 2988–3003. [Google Scholar] [CrossRef]
- Aqabakee, K.; Abdollahi, F.; Taghvaeipour, A.; Akbarzadeh-T, M.R. Recursive Generalized Type-2 Fuzzy Radial Basis Function Neural Networks for Joint Position Estimation and Adaptive EMG-Based Impedance Control of Lower Limb Exoskeletons. Biomed. Signal Process Control 2025, 100, 106791. [Google Scholar] [CrossRef]
- Wang, G.; Liu, Y.; Liu, K.; Jin, L.; Yu, J.; Sun, Z. SEMG Data Driven-Based Anti-Disturbance Control Enables Adaptive Interaction of Lower Limb Rehabilitation Exoskeleton. Biomed. Signal Process Control 2024, 94, 106347. [Google Scholar] [CrossRef]
- Liu, J.; Zhou, X.; He, B.; Li, P.; Wang, C.; Wu, X. A Novel Method for Detecting Misclassifications of the Locomotion Mode in Lower-Limb Exoskeleton Robot Control. IEEE Robot. Autom. Lett. 2022, 7, 7779–7785. [Google Scholar] [CrossRef]
- Liu, J.; Wang, C.; He, B.; Li, P.; Wu, X. Metric Learning for Robust Gait Phase Recognition for a Lower Limb Exoskeleton Robot Based on SEMG. IEEE Trans. Med. Robot. Bionics 2022, 4, 472–479. [Google Scholar] [CrossRef]
- Caulcrick, C.; Huo, W.; Hoult, W.; Vaidyanathan, R. Human Joint Torque Modelling with MMG and EMG during Lower Limb Human-Exoskeleton Interaction. IEEE Robot. Autom. Lett. 2021, 6, 7185–7192. [Google Scholar] [CrossRef]
- Song, X.; Liu, J.; Pan, H.; Rao, H.; Wang, C.; Wu, X. Irrelevant Locomotion Intention Detection for Myoelectric Assistive Lower Limb Robot Control. IEEE Trans. Med. Robot. Bionics 2025, 7, 655–665. [Google Scholar] [CrossRef]
- Yang, M.; Tian, D.; Li, F.; Chen, Z.; Zhu, Y.; Shang, W.; Zhang, L.; Wu, X. A Knowledge Transfer-Based Personalized Human-Robot Interaction Control Method for Lower Limb Exoskeletons. IEEE Sens. J. 2024, 24, 39490–39502. [Google Scholar] [CrossRef]
- Han, J.; Yang, S.; Xia, L.; Chen, Y.H. Deterministic Adaptive Robust Control with a Novel Optimal Gain Design Approach for a Fuzzy 2-DOF Lower Limb Exoskeleton Robot System. IEEE Trans. Fuzzy Syst. 2021, 29, 2373–2387. [Google Scholar] [CrossRef]
- Das, D.B.; Das, O.; Inalpolat, M. A Multi-Modal Sensing Based Terrain Identification Approach for Active Lower Limb Exoskeletons. Expert. Syst. Appl. 2025, 275, 126862. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, D.X.; Ma, Y.; Guo, S.; Wu, X. Landing Area Prediction in Complex Terrains for Walking-Assisted Lower-Limb Exoskeleton Robot. Procedia Comput. Sci. 2023, 226, 120–126. [Google Scholar] [CrossRef]
- Liu, D.X.; Xu, J.; Chen, C.; Long, X.; Tao, D.; Wu, X. Vision-Assisted Autonomous Lower-Limb Exoskeleton Robot. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 3759–3770. [Google Scholar] [CrossRef]
- Li, C.; He, Y.; Chen, T.; Chen, X.; Tian, S. Real-Time Gait Event Detection for a Lower Extremity Exoskeleton Robot by Infrared Distance Sensors. IEEE Sens. J. 2021, 21, 27116–27123. [Google Scholar] [CrossRef]
- Zhang, W.; Zhan, Y.; Ju, W.; Hou, Z.; Kang, R.; Dai, J.S.; Song, Z. A Novel Quasi-Passive Non-Anthropomorphic Lower Limb Exoskeleton for Load-Bearing. IEEE Robot. Autom. Lett. 2024, 9, 9891–9898. [Google Scholar] [CrossRef]
- Tian, D.; Chen, Z.; Li, F.; Yang, M.; Li, J.; Li, W.; He, Y.; Zhang, L.; Wu, X. Dual-Loop Control Framework of a Self-Balancing Lower-Limb Exoskeleton for Assisted Walking. IEEE Trans. Instrum. Meas. 2024, 73, 1–11. [Google Scholar] [CrossRef]
- Qian, Y.; Wang, Y.; Chen, C.; Xiong, J.; Leng, Y.; Yu, H.; Fu, C. Predictive Locomotion Mode Recognition and Accurate Gait Phase Estimation for Hip Exoskeleton on Various Terrains. IEEE Robot. Autom. Lett. 2022, 7, 6439–6446. [Google Scholar] [CrossRef]
- Sarkisian, S.V.; Ishmael, M.K.; Lenzi, T. Self-Aligning Mechanism Improves Comfort and Performance with a Powered Knee Exoskeleton. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 629–640. [Google Scholar] [CrossRef]
- Mcgrath, R.L.; Sergi, F. Repetitive Control of Knee Interaction Torque via a Lower Extremity Exoskeleton for Improved Transparency During Walking. IEEE Trans. Med. Robot. Bionics 2024, 6, 1581–1590. [Google Scholar] [CrossRef]
- Camardella, C.; Porcini, F.; Filippeschi, A.; Marcheschi, S.; Solazzi, M.; Frisoli, A. Gait Phases Blended Control for Enhancing Transparency on Lower-Limb Exoskeletons. IEEE Robot. Autom. Lett. 2021, 6, 5453–5460. [Google Scholar] [CrossRef]
- Zhang, W.; Ling, Z.; Heinrich, S.; Ding, X.; Feng, Y. Walking Speed Learning and Generalization Using Seq2Seq Gated and Adaptive Continuous-Time Recurrent Neural Network (S2S-GACTRNN) for a Hip Exoskeleton. IEEE/ASME Trans. Mechatron. 2023, 28, 2375–2386. [Google Scholar] [CrossRef]
- Li, Z.; Zhao, K.; Zhang, L.; Wu, X.; Zhang, T.; Li, Q.; Li, X.; Su, C.Y. Human-in-the-Loop Control of a Wearable Lower Limb Exoskeleton for Stable Dynamic Walking. IEEE/ASME Trans. Mechatron. 2021, 26, 2700–2711. [Google Scholar] [CrossRef]
- Zhang, P.; Zhang, J.; Chen, Y.; Jia, J.; Elsabbagh, A. Research on Human-Machine Synergy Control Method of Lower Limb Exoskeleton Based on Multi-Sensor Fusion Information. IEEE Sens. J. 2024, 24, 35346–35358. [Google Scholar] [CrossRef]
- Zou, C.; Huang, R.; Qiu, J.; Chen, Q.; Cheng, H. Slope Gradient Adaptive Gait Planning for Walking Assistance Lower Limb Exoskeletons. IEEE Trans. Autom. Sci. Eng. 2021, 18, 405–413. [Google Scholar] [CrossRef]
- Barrutia, W.S.; Bratt, J.; Ferris, D.P. A Human Lower Limb Mechanical Phantom for the Testing of Knee Exoskeletons. IEEE Trans. Neural Syst. Rehabil. Eng. 2023, 31, 2497–2506. [Google Scholar] [CrossRef]
- Zhang, P.; Zhang, J.; Jia, J. Study of Lower Limb Exoskeleton Stair Movement Based on Multicoupled Continuous Dynamic Primitive Gait Learning Strategy. IEEE Sens. J. 2024, 24, 2009–2019. [Google Scholar] [CrossRef]
- Zhan, Y.; Zhang, W.; Hou, Z.; Kang, R.; Dai, J.S.; Song, Z. Non-Anthropomorphic Passive Load-Bearing Lower-Limb Exoskeleton with a Reconfigurable Mechanism Based on Mechanical Intelligence. Mech. Mach. Theory 2024, 201, 105753. [Google Scholar] [CrossRef]
- Yoon, J. Discovering Hidden Strengths: How a Passive Lower Extremity Exoskeleton Boosts the Isometric Pulling Capacity to New Heights. Int. J. Ind. Ergon. 2024, 104, 103661. [Google Scholar] [CrossRef]
- Cao, W.; Chen, C.; Wang, D.; Wu, X.; Chen, L.; Xu, T.; Liu, J. A Lower Limb Exoskeleton with Rigid and Soft Structure for Loaded Walking Assistance. IEEE Robot. Autom. Lett. 2022, 7, 454–461. [Google Scholar] [CrossRef]
- Sugiura, S.; Zhu, Y.; Huang, J.; Hasegawa, Y. Passive Lower Limb Exoskeleton for Kneeling and Postural Transition Assistance with Expanded Support Polygon. IEEE/ASME Trans. Mechatron. 2024, 29, 1193–1204. [Google Scholar] [CrossRef]
- Tu, Y.; Zhu, A.; Song, J.; Zhang, X.; Cao, G. Design and Experimental Evaluation of a Lower-Limb Exoskeleton for Assisting Workers with Motorized Tuning of Squat Heights. IEEE Trans. Neural Syst. Rehabil. Eng. 2022, 30, 184–193. [Google Scholar] [CrossRef] [PubMed]
- Staman, K.; Veale, A.J.; Van Der Kooij, H. Design, Control and Evaluation of the Electro-Hydrostatic Actuator, PREHydrA, for Gait Restoration Exoskeleton Technology. IEEE Trans. Med. Robot. Bionics 2021, 3, 156–165. [Google Scholar] [CrossRef]
- Chen, Z.; Luan, M.; Li, F.; Wang, W.; Tian, D.; Sun, J.; Peng, A.; Wu, X. Anthropomorphic Viscoelastic Compliance Control Method for Self-Balancing Lower Limb Exoskeletons. Procedia Comput. Sci. 2024, 250, 58–66. [Google Scholar] [CrossRef]
- Zheng, Y.; Wang, Y.; Liu, J. Analysis and Experimental Research on Stability Characteristics of Squatting Posture of Wearable Lower Limb Exoskeleton Robot. Future Gener. Comput. Syst. 2021, 125, 352–363. [Google Scholar] [CrossRef]
- Gonzalez, S.; Stegall, P.; Cain, S.M.; Siu, H.C.; Stirling, L. Assessment of a Powered Ankle Exoskeleton on Human Stability and Balance. Appl. Ergon. 2022, 103, 103768. [Google Scholar] [CrossRef]
- Liu, J.; He, Y.; Yang, J.; Cao, W.; Wu, X. Design and Analysis of a Novel 12-DOF Self-Balancing Lower Extremity Exoskeleton for Walking Assistance. Mech. Mach. Theory 2022, 167, 104519. [Google Scholar] [CrossRef]
- Normand, M.A.; Lee, J.; Su, H.; Sulzer, J.S. The Effect of Hip Exoskeleton Weight on Kinematics, Kinetics, and Electromyography during Human Walking. J. Biomech. 2023, 152, 111552. [Google Scholar] [CrossRef]
- Prieto, A.V.; Keemink, A.Q.L.; van Asseldonk, E.H.F.; van der Kooij, H. Implementation and Tuning of Momentum-Based Controller for Standing Balance in a Lower-Limb Exoskeleton with Paraplegic User. IEEE Trans. Neural Syst. Rehabil. Eng. 2025, 33, 343–353. [Google Scholar] [CrossRef]
- Shafer, B.A.; Powell, J.C.; Young, A.J.; Sawicki, G.S. Emulator-Based Optimization of a Semi-Active Hip Exoskeleton Concept: Sweeping Impedance Across Walking Speeds. IEEE Trans. Biomed. Eng. 2023, 70, 271–282. [Google Scholar] [CrossRef] [PubMed]
- Song, J.; Zhu, A.; Tu, Y.; Zhang, X.; Cao, G. Novel Design and Control of a Crank-Slider Series Elastic Actuated Knee Exoskeleton for Compliant Human-Robot Interaction. IEEE/ASME Trans. Mechatron. 2023, 28, 531–542. [Google Scholar] [CrossRef]
- Li, J.; Tian, D.; Li, F.; Yin, M.; Sun, J.; Zhang, L.; Wu, X. Control of Self-Balancing Lower Limb Exoskeleton for Various Wearers Under Dynamic Deformation. IEEE/ASME Trans. Mechatron. 2024, 30, 1935–1946. [Google Scholar] [CrossRef]
- Song, J.; Zhu, A.; Tu, Y.; Zou, J.; Zhang, X. Cable-Driven and Series Elastic Actuation Coupled for a Rigid-Flexible Spine-Hip Assistive Exoskeleton in Stoop-Lifting Event. IEEE/ASME Trans. Mechatron. 2023, 28, 2852–2863. [Google Scholar] [CrossRef]
- Zhu, C.; Yi, J. Knee Exoskeleton-Enabled Balance Control of Human Walking Gait with Unexpected Foot Slip. IEEE Robot. Autom. Lett. 2023, 8, 7751–7758. [Google Scholar] [CrossRef]
- Qian, Y.; Wang, Y.; Geng, H.; Du, H.; Xiong, J.; Leng, Y.; Fu, C. Adaptive Oscillator-Based Gait Feature Extraction Method of Hip Exoskeleton for Stroke Patients. IEEE Trans. Med. Robot. Bionics 2024, 6, 235–244. [Google Scholar] [CrossRef]
- Kim, T.; Jeong, M.; Kong, K. Bioinspired Knee Joint of a Lower-Limb Exoskeleton for Misalignment Reduction. IEEE/ASME Trans. Mechatron. 2022, 27, 1223–1232. [Google Scholar] [CrossRef]
- Basla, C.; Durrenberger, P.; Wolf, P.; Riener, R.; Van Hedel, H.J.A. Changes in Kinematic and Spatiotemporal Gait Parameters with a Biarticular Lower Limb Exosuit for Adolescents with Crouch Gait During Level Walking and Stair Climbing. IEEE Trans. Neural Syst. Rehabil. Eng. 2025, 33, 966–974. [Google Scholar] [CrossRef]
- Tian, D.K.; He, Y.; Chen, Z.; Li, F.; Li, J.; Yin, M.; Zhang, L.; Wu, X.Y. Bionic Design and Control of a 12-DoF Self-Balancing Walking Exoskeleton. IEEE Trans. Autom. Sci. Eng. 2024, 22, 8292–8302. [Google Scholar] [CrossRef]
- Schrade, S.O.; Menner, M.; Shirota, C.; Winiger, P.; Stutz, A.; Zeilinger, M.N.; Lambercy, O.; Gassert, R. Knee Compliance Reduces Peak Swing Phase Collision Forces in a Lower-Limb Exoskeleton Leg: A Test Bench Evaluation. IEEE Trans. Biomed. Eng. 2021, 68, 535–544. [Google Scholar] [CrossRef]
- Soni, V.; Vaz, A. Kinematics and Kinetics of a Knee Assistance Exoskeleton for Sit-to-Stand and Stand-to-Sit Motions with Energy Storage and Regeneration: A Bond Graph Approach. Mech. Mach. Theory 2025, 205, 105866. [Google Scholar] [CrossRef]
- Lee, H.; Rosen, J. Lower Limb Exoskeleton—Energy Optimization of Bipedal Walking With Energy Recycling—Modeling and Simulation. IEEE Robot. Autom. Lett. 2023, 8, 1579–1586. [Google Scholar] [CrossRef]
- Chen, C.; Lv, J.; Xu, Z. A Multi-Indicator Evaluation Method for Human-Machine Effectiveness of Lower Limb Wearable Exoskeleton. Biomed. Signal Process Control 2024, 91, 105976. [Google Scholar] [CrossRef]
- Guitteny, S.; Lafon, Y.; Bonnet, V.; Aissaoui, R.; Dumas, R. Dynamic Estimation of Soft Tissue Stiffness for Use in Modeling Socket, Orthosis or Exoskeleton Interfaces with Lower Limb Segments. J. Biomech. 2022, 134, 110987. [Google Scholar] [CrossRef]
- Zhang, S.; Fan, L.; Ye, J.; Chen, G.; Fu, C.; Leng, Y. An Intelligent Rehabilitation Assessment Method for Stroke Patients Based on Lower Limb Exoskeleton Robot. IEEE Trans. Neural Syst. Rehabil. Eng. 2023, 31, 3106–3117. [Google Scholar] [CrossRef]
- Chen, Z.; Guo, Q.; Yan, Y.; Shi, Y. Model Identification and Adaptive Control of Lower Limb Exoskeleton Based on Neighborhood Field Optimization. Mechatronics 2022, 81, 102699. [Google Scholar] [CrossRef]
- Sun, Y.; Peng, Z.; Hu, J.; Ghosh, B.K. Event-Triggered Critic Learning Impedance Control of Lower Limb Exoskeleton Robots in Interactive Environments. Neurocomputing 2024, 564, 126963. [Google Scholar] [CrossRef]
- Duan, W.; Chen, W.; Wang, J.; Pei, Z.; Chen, J.; Shi, H. Novel Neuromuscular Controller Application Method to Improve the Balance Recovery Ability of Lower Limb Exoskeletons. J. Frankl. Inst. 2023, 360, 8200–8223. [Google Scholar] [CrossRef]
- Gao, L.; Zhao, L.J.; Yang, G.S.; Ma, C.J. A Digital Twin-Driven Trajectory Tracking Control Method of a Lower-Limb Exoskeleton. Control Eng. Pract. 2022, 127, 105271. [Google Scholar] [CrossRef]
- Sharma, R.; Gaur, P.; Bhatt, S.; Joshi, D. Optimal Fuzzy Logic-Based Control Strategy for Lower Limb Rehabilitation Exoskeleton. Appl. Soft Comput. 2021, 105, 107226. [Google Scholar] [CrossRef]
- Laubscher, C.A.; Goo, A.C.; Sawicki, J.T. Optimal Phase-Based Gait Guidance Control on a Lower-Limb Exoskeleton. Control Eng. Pract. 2023, 139, 105651. [Google Scholar] [CrossRef]
- Wu, X.; Yuan, Y.; Zhang, X.; Wang, C.; Xu, T.; Tao, D. Gait Phase Classification for a Lower Limb Exoskeleton System Based on a Graph Convolutional Network Model. IEEE Trans. Ind. Electron. 2022, 69, 4999–5008. [Google Scholar] [CrossRef]
- Wang, J.; Liu, J.; Zhang, G.; Guo, S. Periodic Event-Triggered Sliding Mode Control for Lower Limb Exoskeleton Based on Human–Robot Cooperation. ISA Trans. 2022, 123, 87–97. [Google Scholar] [CrossRef] [PubMed]
- Shi, D.; Zhang, W.; Wang, L.; Zhang, W.; Feng, Y.; Ding, X. Joint-Angle Adaptive Coordination Control of a Serial-Parallel Lower Limb Rehabilitation Exoskeleton. IEEE Trans. Med. Robot. Bionics 2022, 4, 775–784. [Google Scholar] [CrossRef]
- Duan, W.; Chen, W.; Wang, J.; Liu, J.; Pei, Z.; Chen, J. Gait-Generation Strategy for Lower Limb Exoskeleton Based on Central Pattern Generator. IEEE/ASME Trans. Mechatron. 2024, 29, 4191–4202. [Google Scholar] [CrossRef]
- Zheng, J.; Li, Z.; Huang, L.; Gao, Y.; Wang, B.; Peng, M.; Wang, Y. A GMM-DTW-Based Locomotion Mode Recognition Method in Lower Limb Exoskeleton. IEEE Sens. J. 2022, 22, 19556–19566. [Google Scholar] [CrossRef]
- Chen, L.; Lin, Q.; Cheng, H.; Fang, B.; Zhang, J.; Hong, J. A Deep Learning Hybrid Model for Identifying Gait Patterns and Transition States of Lower Limb Exoskeleton Wearer. IEEE Sens. J. 2025, 25, 7698–7707. [Google Scholar] [CrossRef]
- Livolsi, C.; Conti, R.; Giovacchini, F.; Vitiello, N.; Crea, S. A Novel Wavelet-Based Gait Segmentation Method for a Portable Hip Exoskeleton. IEEE Trans. Robot. 2022, 38, 1503–1517. [Google Scholar] [CrossRef]
- Wu, X.; Zhu, A.; Dang, D.; Shi, L. Novel Lightweight Lower Limb Exoskeleton Design for Single-Motor Sequential Assistance of Knee & Ankle Joints in Real World. IEEE Robot. Autom. Lett. 2024, 9, 2391–2398. [Google Scholar] [CrossRef]
- Zhou, L.; Chen, W.; Bai, S.; Wang, J.; Zhao, Z.; Zhao, X.; Yu, X. Lower Limb Exoskeleton Parasitic Force Modeling and Minimizing with an Adaptive Trajectory Controller. Mech. Mach. Theory 2022, 170, 104731. [Google Scholar] [CrossRef]
- Mohamad, H.; Ozgoli, S. Online Gait Generator for Lower Limb Exoskeleton Robots: Suitable for Level Ground, Slopes, Stairs, and Obstacle Avoidance. Rob. Auton. Syst. 2023, 160, 104319. [Google Scholar] [CrossRef]
- Lin, J.; Thomas, G.C.; Divekar, N.V.; Peddinti, V.; Gregg, R.D. A Modular Framework for Task-Agnostic, Energy Shaping Control of Lower Limb Exoskeletons. IEEE Trans. Control Syst. Technol. 2024, 32, 2359–2375. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.W.; Liu, G.F.; Zheng, T.J.; Li, H.W.; Zhao, S.K.; Zhao, J.; Zhu, Y.H. Blending Control Method of Lower Limb Exoskeleton toward Tripping-Free Stair Climbing. ISA Trans. 2022, 131, 610–627. [Google Scholar] [CrossRef] [PubMed]
- Zhao, J.; Zhang, Y.; Hou, H.; Yue, Y.; Meng, K.; Yang, Z. Active Disturbance Rejection Control with Backstepping for Decoupling Control of Hydraulic Driven Lower Limb Exoskeleton Robot. IEEE Trans. Ind. Electron. 2024, 72, 714–723. [Google Scholar] [CrossRef]
- Gomez-Vargas, D.; Ballen-Moreno, F.; Rodriguez-Guerrero, C.; Munera, M.; Cifuentes, C.A. Experimental Characterization of the T-FLEX Ankle Exoskeleton for Gait Assistance. Mechatronics 2021, 78, 102608. [Google Scholar] [CrossRef]
- Zhao, J.; Yang, T.; Sun, X.; Dong, J.; Wang, Z.; Yang, C. Sliding Mode Control Combined with Extended State Observer for an Ankle Exoskeleton Driven by Electrical Motor. Mechatronics 2021, 76, 102554. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Section 3.1 | Application Area | Key Features | Reference(s) |
| General Clinical Rehabilitation (stroke, CP, neuromuscular) | Targeting impaired motor function; adaptive control; overground gait rehab | [12,13,14,15] | |
| Hemiplegic and Neuromuscular Patient Rehab | Symmetric gait restoration, motor coordination improvement | [16,17] | |
| Pediatric Cerebral Palsy (Crouch Gait Correction) | Crouch gait correction in CP children; safety and structure considerations | [18] | |
| Pediatric Community Mobility | Portable exoskeletons; lightweight, safe, adaptive gait tracking for children | [19] | |
| Broader Real-World Locomotor Recovery | Covers acute to chronic rehab; machine learning, sensor fusion, torque adaptation | [20,21,22,23,24,25,26,27,28,29,30,31,32,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48,49,50,51,52,53,54,55,56,57,58,59,60,61,62] | |
| Section 3.2 | Brain-Machine Interface (BMI) using EEG and Motor Imagery | Direct intention mapping, real-time control, suitable for low voluntary control users | [63,64,65] |
| EMG/sEMG-based Intention Recognition | Uses residual muscle activity; deep learning and hybrid classifiers; supports multiple locomotion modes | [66,67,68,69,70,71,72,73] | |
| Section 3.3 | Terrain Classification and Transition Prediction | Uses vision, IMUs, and multi-modal fusion; supports stair/slope/uneven terrain navigation | [74,75,76,77,78,79,80,81,82,83,84] |
| Adaptive Locomotion and Trajectory Correction in Dynamic Terrain | Balance-aware control, real-time path adjustment, enhanced terrain safety | [85,86,87,88,89] | |
| Section 3.4 | Load-Bearing and Military Assistance | Passive mechanical design; supports high-load tasks (e.g., military, rescue) | [90] |
| Industrial Postural Support and Force Distribution | Ergonomic support in squatting/kneeling/lifting; emphasis on comfort and reliability | [91,92,93,94,95] | |
| Energy-Efficient Occupational Support | Electromagnetic squat support; low energy consumption; industrial ergonomics | [95] | |
| Section 3.5 | Balance Correction and Fall Prevention | Targets balance loss and posture stability in dynamic/static tasks; trunk control | [96,97,98,99,100,101,102,103,104,105,106,107,108,109,110] |
| Full-Body Self-Balancing with Distributed Actuation | 12-DOF exoskeleton; kinematic modeling; real-time posture correction | [113] | |
| Dynamic Stability and Perturbation Compensation | Uses inverted pendulum models; CoG tracking; upright posture maintenance | [101,110] | |
| Balance Correction and Fall Prevention | Targets balance loss and posture stability in dynamic/static tasks; trunk control | [96,97,98,99,100,101,102,103,104,105,106,107,108,109,110] | |
| Section 3.6 | Energy Regeneration during Locomotion | Bond graph modeling; mechanical energy harvesting during sit-to-stand | [112] |
| Energy-Saving Joint Designs and Control | Optimized joint structure and control policies for power efficiency | [111,113] | |
| Metabolic Cost Reduction through Torque Assistance | 35% metabolic reduction using GRF-based synchronized torque assistance | [113] | |
| Section 3.7 | Multi-Indicator Performance Evaluation | Integrates gait symmetry, torque, timing, and user effort metrics | [114] |
| Stiffness Modeling for Human–Exoskeleton Interface | Ensures safe and effective physical interaction during use | [115] | |
| AI-Based Rehabilitation Outcome Prediction | Uses motion/physiological data to guide therapy decisions | [116] | |
| Biomechanical Performance Clustering and Analysis | Unsupervised clustering, PCA for inter-user/task variability analysis | [46] |
| Section 4.1 | Control Technique | Key Features | Reference(s) |
| Swarm-Initialized Adaptive (SIA) Control | Combines Lyapunov adaptation with swarm optimization; robust and responsive | [12] | |
| Model-Based Fuzzy Control | Low-dimensional approximation; enhanced real-time performance under uncertainty | [16] | |
| Adaptive Interaction Torque Assist-As-Needed (AITAAN) | Dynamically adjusts assistance based on user effort | [15] | |
| Neighborhood Field Optimization + Adaptive Backstepping | System identification and adaptive tracking combined | [117] | |
| Unified Adaptive Control Framework (ACPG, NDO, PPC) | Robust trajectory tracking using layered adaptive controllers | [14] | |
| Section 4.2 | Impedance Estimation in Uncertain Environments | RBFNN + type-2 fuzzy logic for adaptive impedance control | [66] |
| Dynamic Parameter Fuzzy Impedance Control (DPFIC) | Real-time adaptation during gait disturbances | [29] | |
| Compliance-Based Torque Modulation with CPGs | Natural joint-level torque modulation via impedance and CPGs | [31] | |
| Bio-Inspired Viscoelastic Compliance Control | Anthropomorphic viscoelastic muscle modeling for dynamic walking | [96] | |
| Real-Time Gait Phase-Dependent Impedance Adjustment | Impedance varies based on user gait phase and intention | [82] | |
| Section 4.3 | Neural Network-Based Torque Estimation | Zeroing Neural Network + deep CNN for robust torque prediction | [67] |
| Reinforcement Learning for Event-Triggered Impedance Control | Uses critic networks to reduce communication load while maintaining responsiveness | [118] | |
| Repetitive Learning for Gait Disturbance Compensation | Phase observer-guided repetitive learning for cyclic motion tasks | [119] | |
| Digital Twin-Enhanced Trajectory Optimization | DDPG and PSO optimize learning with synchronized virtual models | [28,120] | |
| Concurrent Learning for Generalized Robust Control | Maintains task performance across scenarios without retuning | [37,60,62] | |
| Metaheuristic-Tuned Fuzzy Controllers | Dragonfly Algorithm vs. GA for fuzzy-PID tuning; DFA shows better convergence | [121] | |
| Section 4.4 | CNN-Based Terrain Classification and Foot Prediction | Visual + IMU inputs; anticipates elevation changes and obstacles | [74,75] |
| Multimodal Sensor Fusion with GRU/CNN for Terrain Transitions | Combines camera and IMU with temporal models for adaptive gait | [80,84] | |
| Gait-Phase-Aware Admittance Control | Uses FFT to align admittance with step frequency for adaptive assistance | [13] | |
| Phase-Based Bilateral Mixing for Gait Guidance | Synchronizes assistance with user gait phase transitions | [122] | |
| GCN-Based Gait Event Classification | Identifies heel strike and toe-off events for precise control timing | [123] | |
| Section 4.5 | Event-Triggered Control with SMC and EMG Estimation | Combines event-triggering, sliding mode control, and GA-BP-based EMG decoding | [124] |
| Reinforcement Learning-Based Event-Triggered Impedance Control | Reduces communication overhead with critic network-based event logic | [118] | |
| Energy Regeneration via Bond Graphs | Captures mechanical energy during sit-to-stand transitions | [112] | |
| Metabolic Cost Reduction with GRF-Based Torque Control | Uses CoM and GRF to lower metabolic load by 35% | [113] | |
| Passive Energy Efficiency in 2-DOF Knee Exoskeleton | Parallel spring mechanism reduces active energy needs | [111] | |
| Section 4.6 | EMG/sEMG-Based Gait Mode and Motion Prediction | Uses autoencoders, CNNs, GATs, and U-Net+LSTM to classify stride, force, and gait type | [68,69,70,71,72,73] |
| EEG-Based Intention Detection with ErrP Correction | Corrects false gait starts using error-related potentials in BMI systems | [63] | |
| Motor Imagery Decoding via CSP and Attention Networks | Ensemble classifier with CSP and attention layers for high-accuracy decoding | [64] | |
| EEG-Based Intention Prediction with Feature Fusion | Combines multiple EEG features with multivariate optimization for reliability | [65] | |
| Section 4.7 | Hybrid Serial-Parallel Actuation with Kinematic Modeling | Precise modeling for self-balancing; structural complexity handling | [99] |
| Neural and GRU-Based Controllers for Complex Structures | RBFNN and GRU-PD control schemes for mechanical coordination | [125,126] | |
| Self-Balancing and Posture Stability Control | Inverted pendulum models, foot placement, and multi-DOF actuation | [101,104,110] | |
| Dual Closed-Loop Sensor Fusion for Gait Disturbance | TSLSTM with dual loops to manage unilateral gait instability | [86] | |
| Integrated Multi-Modal Control Frameworks | Combines gait generation, mode recognition, and torque control | [32,33,41] | |
| Section 4.8 | Multi-Indicator Evaluation Using Clustering, SOM, PCA | Enables personalization by linking biomechanics with control outcomes | [25,46,114] |
| Closed-Loop Recalibration Using Gait and EMG Feedback | Uses GRF, EMG drift, and gait deviation to adapt assistance over time | [39,42,51] |
| Section 5.1 | Sensing Technology | Key Features | Reference(s) |
| Vision-IMU Fusion for Terrain Classification and Foot Prediction | CNNs and MobileNetV2 classify terrain and predict foot landing zones for safety | [74,75] | |
| Advanced Terrain Differentiation with Camera/LIDAR/IMU | Fusion of modalities handles stairs, ramps, and level surfaces in variable conditions | [77,79,80] | |
| Terrain Mode Recognition Using IMU and Pressure Sensors | GMM and DTW classify modes based on fused inertial and force data | [127] | |
| Gait Phase Recognition Using Temporal IMU Data | TCN and LSTM models enhance noise resilience and small dataset handling | [128,129] | |
| Section 5.2 | ErrP Detection in Asynchronous BMI Systems | Corrects false intentions via tactile, visual, and combined EEG feedback | [63] |
| Motor Imagery Classification with Neural Networks | Deep and shallow neural networks enable intuitive control of gait functions | [64] | |
| Multifeature EEG Fusion for Robust Classification | Uses CFC, CSP, and PSD features to improve decoding for high-impairment users | [65] | |
| Section 5.3 | EMG-Based Torque Estimation and Control | Uses neural networks, CNNs, and NDOs to estimate effort and control torque | [15,24,66,67,117] |
| EMG-Based Gait Phase and Motion Classification | Advanced deep learning (GAT, CNN, U-Net, LSTM) for gait classification | [71,72,73,130] | |
| Comparative Evaluation of EMG and MMG for Torque Prediction | Machine learning regressors compare biosignal effectiveness | [70] | |
| Hybrid EMG + Foot Pressure Sensor Integration | Improves gait segmentation and motion prediction in varied terrain | [47,49,51,53,61,105] | |
| Section 5.4 | Torque Assistance Using CoM and GRF Data | Reduces energy cost in hip/ankle exoskeletons by optimizing torque output | [87] |
| Fusion of EMG, GRF, and Encoders for Gait and Asymmetry Detection | Tracks gait phase and limb asymmetry for personalized rehab | [39,43,82] | |
| Reinforcement Learning with 6-Axis Force/Torque Feedback | Real-time torque control in hip exoskeletons using sensor feedback | [38] | |
| Parasitic Force Sensors for Misalignment Correction | Shank-embedded sensors detect and correct human–exoskeleton misalignment | [131] | |
| Section 5.5 | FFT-Based Sensor Fusion for Trajectory and Intent | Combines FFT and sensor fusion to enhance trajectory generation and intent estimation | [22,24] |
| Kalman Filter and Neural Estimation for State Prediction | Improves state accuracy in tasks like stair climbing and fall recovery | [50,52,56] | |
| Multimodal Fusion for Real-Time A-CPG Adaptation | Adapts A-CPG using foot pressure, joint angle, and terrain info | [76] | |
| Digital Twin Feedback Integration | Synchronizes virtual and real sensor feedback for improved control precision | [120] | |
| Multi-Sensor Fusion with Dual Closed-Loop LSTM Control | Stabilizes gait under asymmetry using temporal LSTM and sensor feedback | [86] | |
| Evaluation via Sensor-Derived Gait Metrics | Assesses speed, symmetry, and fluency to evaluate human–exoskeleton cooperation | [26] | |
| Section 5.6 | Physical Phantom Testing with 3D-Printed Legs | Force plates and motion tracking simulate joint torque and force transfer | [88] |
| Digital Twin for Trajectory Validation | Estimates the impact of model uncertainty to refine control prior to deployment | [50] | |
| Section 5.7 | LSTM-Based Gait Phase Estimation for Irregular Pediatric Gait | Handles variability in gait patterns to improve timing and control | [19] |
| Multi-Point Sensing for Crouch Gait Monitoring | Tracks gait timing, angular offset, and foot orientation in children | [109] | |
| LSTM-Based Gait Phase Estimation for Irregular Pediatric Gait | Handles variability in gait patterns to improve timing and control | [19] | |
| Section 5.8 | Rehabilitation Outcome Prediction with ML | Combines physiological data, torque, and kinematics to assess therapy success | [116] |
| Motion Type Classification with Wearable Sensors | Classifies gait types and turning using inertial sensors | [45,46,83] | |
| Biomechanical Performance Scoring via Clustering and PCA | Quantifies rehab progression using objective, data-driven metrics | [45,46] | |
| Section 5.9 | IMU-Based Gait Symmetry and Postural Control Evaluation | Assesses torso sway and segment timing during tasks like balance beam walking | [98] |
| Foot Placement and Elevation Tracking with IMUs | Adapts walking across stairs/inclines with context-aware control | [54,84,101] | |
| Vision-IMU Fusion for Terrain Awareness | Ideal for real-world navigation using multimodal deep learning | [74,75,80] | |
| EMG/EEG for High-Resolution Intent Prediction | Neural models decode motion intent in fine detail | [63,65,71] |
| Section | Category | Key Features | Reference(s) |
|---|---|---|---|
| Section 6.1 | Standard Multi-DOF Powered Systems | Torque/position-controlled multi-DOF designs for sit-to-stand and gait training; limited by weight and complexity | [12,13,14,15] |
| Section 6.2 | Passive and Mechanically Intelligent Designs | Gravity compensation, wire-rope energy systems, and passive supports for ergonomic industrial use | [90,91,92,93,94,112] |
| Section 6.3 | Compliant and Bio-Inspired Actuation | AVMM, CPGs, and passive biarticular joints for human-like movement and energy efficiency | [31,36,44,78,81,96,113] |
| Section 6.4 | Pediatric and Lightweight Adaptations | Soft-rigid systems, low-weight actuators, and compliant joints for children or low-mobility users | [18,19,34,109] |
| Section 6.5 | Modular and Terrain-Adaptive Platforms | Trajectory mixing, modular actuators, terrain-simulation testbeds | [32,122,126,132] |
| Section 6.6 | High-Fidelity Sensing and Phantom-Based Hardware | Embedded sensors in test phantoms and physical models for torque and compliance validation | [25,88,131] |
| Section 6.7 | Digital Twin and AI-Augmented Hardware | Virtual-physical synchronization with actor–critic models for real-time control optimization | [25,28,48,50,64,105,120] |
| Section 6.8 | Torque-Sensing and Deep Learning-Enhanced Designs | Embedded torque sensing, deep learning models for joint variability and adaptation | [37,38,42] |
| Section 6.9 | Embedded Sensor Platforms for Gait Evaluation | Wearable sensors and vision systems for real-time gait segmentation and biomechanical monitoring | [39,41,46,80,82,83] |
| Section 6.10 | Lightweight, Foldable, and Wearable Systems | Portable, home-use, and foldable devices with passive or low-weight actuators | [95,103,106,108] |
| Section 6.11 | Self-Balancing and Whole-Body Support Systems | 12-DOF structures, trunk and foot actuation, self-corrective balancing for fall prevention | [99,101,104,110,117] |
| Section 6.12 | Trunk-Lower Limb Coordination Systems | Combined actuation for trunk and limbs for better CoM regulation and dynamic balance | [102] |
| Section | Category | Key Features | Reference(s) |
|---|---|---|---|
| Section 7.1 | Gait-Adaptive and Torque-Based Interaction | Real-time adjustment via admittance/torque control; promotes user autonomy | [13,14,15] |
| Section 7.2 | Biosignal-Driven Intention Recognition | Uses EMG/EEG for intention detection with deep learning for responsive actuation | [9,34,63,65,66,67,71,72,73,130] |
| Section 7.3 | Fault-Tolerant and Safe Interaction Control | Adaptive and stable controllers maintain function under faults | [17,24,118,119] |
| Section 7.4 | Bio-Inspired Compliance and Physical Alignment | Viscoelastic models and passive actuators for comfort and alignment | [36,78,81,96,131] |
| Section 7.5 | Personalized Assistance for Special Populations | Lightweight and adaptive systems for children and users with irregular gait | [19,61,64,109] |
| Section 7.6 | Evaluation-Based and Performance-Aware HRI | Biomechanical and performance scoring tools to optimize HRI | [25,26,29,31,46,61,114,133] |
| Section 7.7 | Human-in-the-Loop and Impedance Control Approaches | Real-time impedance tuning based on user feedback | [47,51,55,60,62,85,86] |
| Section 7.8 | Terrain-Adaptive and Environment-Aware Support | Adjusts control based on terrain using feedback and learning models | [32,33,38,76,79] |
| Section 7.9 | Symmetry- and Balance-Oriented HRI | Combines trunk and limb coordination for balance and symmetry | [58,66,102,104,110,117,126] |
| Section 7.10 | Passive Assistance for Ergonomic Support | Passive systems for occupational use; structural support without actuators | [92,93] |
| Section 7.11 | Adaptive Support Based on Capability | Adjusts torque/stiffness in real time to match evolving user capacity | [35,37,39] |
| Section 7.12 | Trajectory Learning and Predictive HRI | Learns user motion profiles for predictive and probabilistic assistance | [41,42,46,48,53,105] |
| Section | Category | Key Features | Reference(s) |
|---|---|---|---|
| Section 8.1 | Simulations and Healthy Subject Testing | Simulation and healthy trials for validating mechanics and control; includes environmental tests | [12,13,14,15,66,67,117,132] |
| Section 8.2 | Pathological and Comparative Clinical Evaluations | Clinical trials in hemiplegic, post-stroke, or pediatric patients; assesses therapy and gait outcomes | [16,19,34,35,37,39,40,41,109] |
| Section 8.3 | Terrain-Specific and Outdoor Evaluations | Real-world terrain trials using IMU, camera, and environmental trials for stairs, slopes, and balance | [74,76,77,79,80,91,98] |
| Section 8.4 | Biosignal Validation and Dataset-Based Evaluations | Multi-subject EMG/EEG trials for model training and classification accuracy | [20,63,64,65,67,68,69,70,71,127] |
| Section 8.5 | Biomechanical Evaluation and Phantom-Based Testing | Marker tracking, clustering, and phantoms to assess torque, compliance, and performance scoring | [46,88,111,114,115] |
| Section 8.6 | Validation of Control Accuracy and Tracking | Evaluates tracking, torque, and gait phase with metrics like RMS error, GCN accuracy, and convergence | [28,50,56,72,73,123,126,130] |
| Section 8.7 | Fall Recovery, Balance, and Stability Evaluation | Tests safety, fall prevention, and postural recovery under perturbations or stair climbing | [58,101,103,108,110,134] |
| Section 8.8 | Multimodal Functional and Cooperative Testing | Functional rehab tests (TUG, 6MWT) and coordination analysis using multi-indicator frameworks | [25,26,32,57,62,106,107,120] |
| Section 8.9 | Simulation-Only or Early-Stage Studies | Pure simulation to explore new control concepts or system behaviors | [30,31,33,87,89,112,135] |
| Section | Category | Key Features | Reference(s) |
|---|---|---|---|
| Section 9.1 | Breakthroughs in Control Architectures and Learning-Based Adaptation | Swarm-based, FFT-admittance, DDPG, and concurrent learning-based adaptive control with digital twins | [12,13,16,28,37,62,118,119,120] |
| Section 9.2 | Terrain Awareness, Gait Phase Prediction, and Environment Adaptation | CNNs, GCNs, and A-CPGs for terrain classification and phase prediction with >90% accuracy | [71,73,74,75,76,123,128] |
| Section 9.3 | Robust and Fault-Tolerant Control Mechanisms | Fault-tolerant and SMC-based control with EMG/ESO for torque and fall prediction | [17,56,124,131,135,137] |
| Section 9.4 | Passive and Energy-Efficient Mechanical Innovations | Passive U-C-R joints, spring models, bond graph modeling, biarticular compliance | [78,90,92,111,112] |
| Section 9.5 | Pediatric, Pathology-Aware, and Gait-Impaired Innovations | Lightweight and resilient systems for pediatric and irregular gait with ML-based gait estimation | [18,19,109,116] |
| Section 9.6 | Human–Robot Cooperation and Biomechanical Evaluation | SOM, PCA, multi-indicator scores, and phantoms for force and gait evaluation | [26,46,88,114] |
| Section 9.7 | Reinforcement Learning, HRI Modeling, and Co-Adaptive Interfaces | Actor–critic, DDPG, EMG-PAE, and BMI-driven intention tuning for stability and torque | [38,48,51,63,64,65,85,101,102] |
| Section 9.8 | Gait Pattern Generation, Symmetry, and Predictive Modeling | Learning-based modular generators and probabilistic assist-as-needed allocation | [33,41,42,126,132] |
| Section 9.9 | Classification and Segmentation Accuracy | EMG/TCN/GAT/GCN classifiers achieving 92–99% accuracy and robustness to noise | [45,68,69,83] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hasan, S.; Alam, N. Comprehensive Comparative Analysis of Lower Limb Exoskeleton Research: Control, Design, and Application. Actuators 2025, 14, 342. https://doi.org/10.3390/act14070342
Hasan S, Alam N. Comprehensive Comparative Analysis of Lower Limb Exoskeleton Research: Control, Design, and Application. Actuators. 2025; 14(7):342. https://doi.org/10.3390/act14070342
Chicago/Turabian StyleHasan, Sk, and Nafizul Alam. 2025. "Comprehensive Comparative Analysis of Lower Limb Exoskeleton Research: Control, Design, and Application" Actuators 14, no. 7: 342. https://doi.org/10.3390/act14070342
APA StyleHasan, S., & Alam, N. (2025). Comprehensive Comparative Analysis of Lower Limb Exoskeleton Research: Control, Design, and Application. Actuators, 14(7), 342. https://doi.org/10.3390/act14070342